
八臂式分动推靠器动力设计分析*
2016-07-25 03:29王宏建张小平王秀霞孙东利袁晓燕
石油管材与仪器 2016年3期
关键词:极板
王宏建,张小平,柏 锐,王秀霞,孙东利,袁晓燕
(大庆钻探工程公司测井公司 黑龙江 大庆 163412)
·开发设计·
八臂式分动推靠器动力设计分析*
王宏建,张小平,柏锐,王秀霞,孙东利,袁晓燕
(大庆钻探工程公司测井公司黑龙江大庆163412)
摘要:提出了一种八臂式分动机械推靠器的实现方法。 根据需要完成的功能确定推靠器的工作方式,设计它的机械结构和参数,并对推靠机构各部件进行力学分析,得出驱动压盘的力F和推靠力F0的函数关系式,代入结构参数的设计值,在整个推靠域上得出推靠力F0和抱紧力的极限值,并对动力传动机构进行分析。经过测试和现场应用,八臂式分动推靠器机械结构和参数设计合理,极板贴靠井壁严实,动力设计符合实际应用要求,机械性能稳定可靠。
关键词:井径测井;分动推靠器;八臂推靠器;极板
0引言
八臂分动推靠器是一个机械平台,可以安装成像测井仪器传感器阵列,采集大量直接的和间接的地下信息[1,2]。比较温度、压力特性,推靠器的结构是最先要考虑的[3]。采用分动式特别适合于在井径不规则地层中进行测量[4],采用八个推靠臂能够增加井壁覆盖率,但增加运行的可靠性困难,这就要求在整个推靠域上推靠机构在力学和运动学上都要有准确合理的考虑,达到运行自如,取得可信资料。2011年大庆测井公司在国家大庆油田原油4 000万吨持续稳产重大科技专项支持下研发新一代微电阻率扫描成像测井(简称电成像)技术,于2013年推出具有自主知识产权的推靠器。本文介绍了动力传动机构及结构参数设计情况以及仪器应用情况。
1仪器构成及工作原理
推靠器安装八支推靠臂独立运动,八个极板错落排布,可应用于多褶皱、椭圆等各种复杂的井眼;八个均匀分布的井径测量井眼半径的几何变化。传动部分封闭在一个密封的外壳内,不受外界钻井液和岩石碎屑的影响,动力传动效率高,推靠力随井径值平缓下降,推靠器内安装有一只5 kΩ行程电位计,提供了一个电压测量,监测当推靠臂伸缩时施加到推靠臂连接机构上的压力,用于监控探头的张收情况,帮助故障定位,同时地面操作员通过监控来调节推靠力获得清晰的图像[5]。推靠器分成分动式推靠机构和动力传动机构两部分,如图1所示。
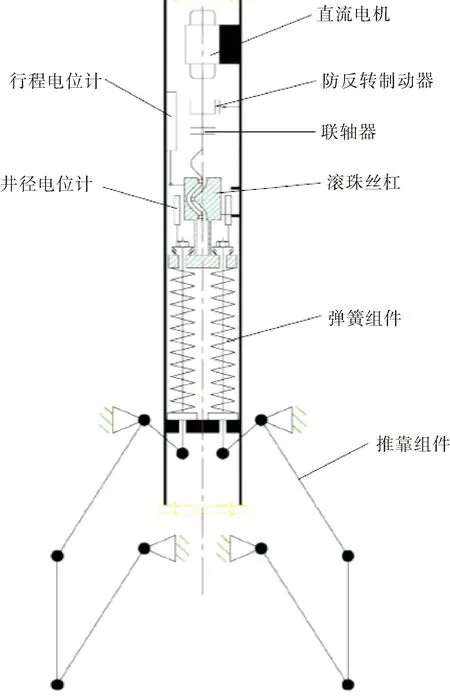
图1 推靠器构成及工作原理图
推靠器在接通110VDC电源后,电机正转,扭矩通过行星齿轮减速器,经过防反转制动器、联轴器、滚珠丝杆后将旋转运动变为轴向直线运动,滚动螺母驱动压盘,压缩弹簧组件,从而推动推靠臂向外伸张紧贴井壁。当行程电位计显示张开到位时,扭矩限制器保护启动,这是张开推靠的动作。收拢时,电机反转,扭矩传动机构反向驱动,压盘利用回收轴环推动推靠臂收缩,推靠臂收拢抱紧,当行程电位计显示收拢到位时,扭矩限制器保护启动,收拢完毕。
在推靠状态时,电机动力驱动压盘压缩主弹簧,主弹簧的弹力通过传动机构转化为推靠臂的推靠力;在收拢状态时,电机动力反向驱动压盘压缩缓冲弹簧,克服弹簧力、摩擦力及运动件的重力作用,把推靠臂收拢。弹簧采用碟簧串联组合设计,适用于空间小,负荷大的精密机械[6]。
2设计分析
2.1分动式推靠机构力学设计分析
不考虑极板和推靠臂等零件的质量,推靠臂l3为原动件,l5为从动件,二者相当于双曲柄,极板l4为连杆,与仪器主体组成单自由度的平行四边形传动机构,优点是在测井过程中极板能够始终与井壁均匀贴合。推靠器的驱动部分包括连杆l1、曲柄l2和滑块l0(即推拉杆)相当于一个曲柄滑块机构。作用在传动机构上的力有驱动压盘的力F和推靠力F0,如图2所示。MN为仪器中心线,AC为仪器外表面,AC与MN平行。图2集中反映了推靠臂的受力状态,图3~图5对每个杆进行受力分析如下:
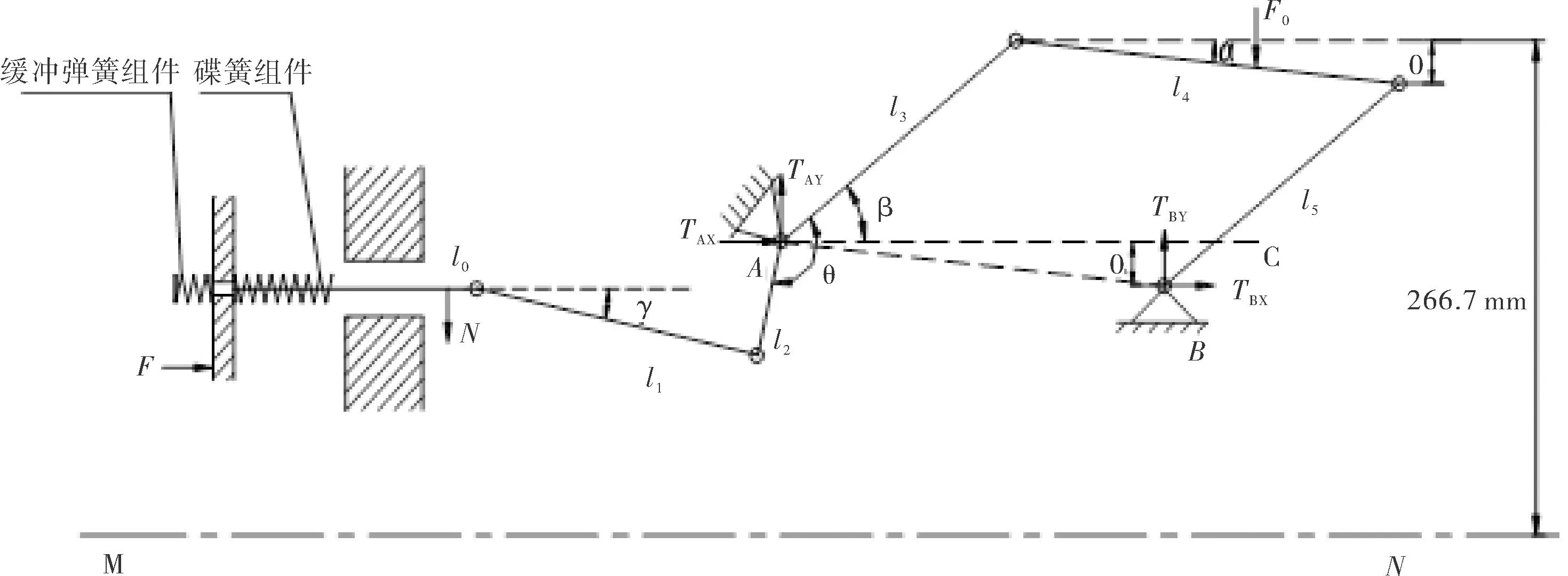
图2 整体结构简图
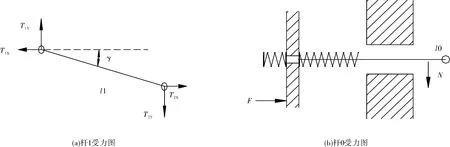
图3 杆1和杆0的受力分析
因为杆1是二力杆(重力忽略不计),受力大小相等,方向相反,并与杆件方向相同。得到三个受力方程(1)(2)(3):
T1Y= T2Y
(1)
T1X= T2Y
(2)
(3)
对于杆0,有方程(4)(5):
F=-T1X
(4)
N=-T1Y
(5)
得到条件组(一):
T2X=-F
(6)
T2Y=-F tgγ
(7)
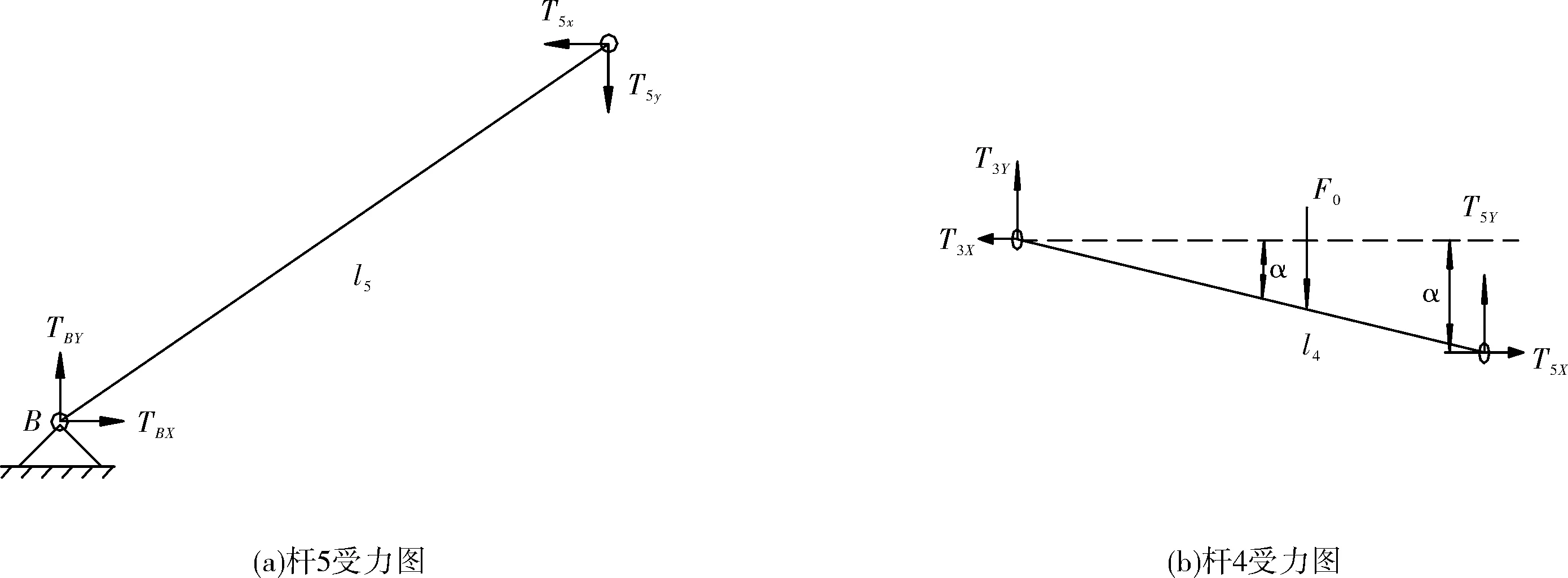
图4 杆5和杆4的受力分析
根据杆5是二力杆,得到三个受力方程(8)(9)(10):
TBX= T5X
(8)
TBY= T5Y
(9)
(10)
对于杆4有三个方程(11)(12)(13):
F0= T5Y+ T3Y
(11)
T3X= T5X
(12)
0.5·F0·l4·cosα =T5X·l4·sinα+T5Y·l4·cosα
(13)
由式(12)得到式(14);由式(10)、(13)得到式(15),式(14)(15)合称条件组(二):
T5X= T3X
(14)
T5Y= T3Xtgβ
(15)
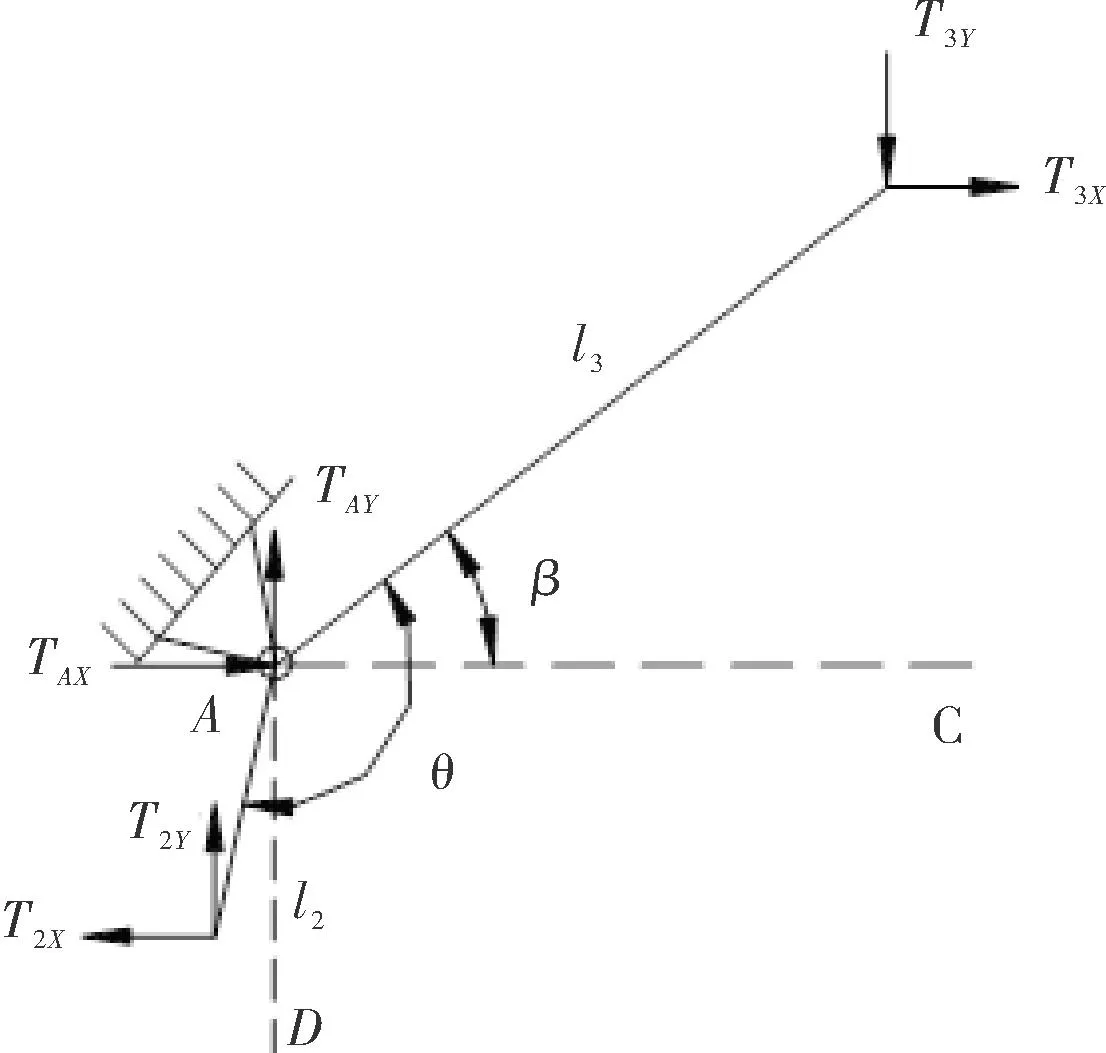
图5 杆2和杆3的受力分析
杆2和杆3所受合力为零,所以有三个方程(16)(17)(18):
TAX+ T3X- T2X= 0
(16)
TAY+ T2Y- T3Y= 0
(17)
T2Y·l2·cos[π-(θ-β)]+T3X·l3·sinβ+T3Y·l3·cosβ+T2X·l2·sin[π-(θ-β)]=0
(18)
将条件组(二)代入式(13)得到式(19);再将(15)、(19)代入(11),得到式(20)。式(19)(20)合称条件组(三):
(19)
(20)
将条件组(一)、(三)式代入式(18),得到:
(21)
所以,当β=0°时推靠器处于全收状态,其结构参数的设计结果为:θ=112.5°,12=30.5 mm,l3=304.8 mm,γ=4.986°,代入式(21)中,得公式(22):
F= 10.44F0
(22)
又当β=60°时推靠器处于全张状态,其结构参数的设计结果为:
θ=112.5°,12=30.5 mm,13=304.8 mm,γ=2.614°,代入式(21)中,得式(23):
F= 6.53F0
(23)
2.2弹簧组件的力学设计分析[7]
主弹簧128片,缓冲弹簧20片,两个调整垫片分别为6 mm和24.5 mm,装配后的间隙为3.7 mm。压盘行程h1=30.43 mm,推拉杆10行程h2=29.98 mm。设计调整垫片可以更灵活调整推靠力。
2.2.1主弹簧组件的最大轴向力的确定
弹簧组件采用碟簧串联安装设计,根据支臂行程关系,在推靠力为最大,井径为零(β=0°)状态下,计算主弹簧产生的最大轴向力Qmax。
碟簧实际使用时,允许的最大变形量为:
0.75h0=0.75×0.6=0.45 mm
此时碟簧载荷F即为主弹簧产生的最大轴向力Qmax。
滚珠丝杆承受的最大轴向载荷QA设计为:
QA= 6×Qmax =13 726.398 N
将载荷F代入式(22),得最大推靠力为:F0= 219.14 N
2.2.2最小推靠力的确定
在推靠器处于全张状态时,β=60°,推拉杆l0走完自己的行程,碟簧总变形量为:30.43-3.7=26.73 mm,单片碟簧变形量为0.209 mm,计算碟簧载荷为1168.695 N,代入公式(23)中,得最小推靠力F0为178.97 N。
2.2.3最大抱紧力确定
仪器收拢时,推靠臂往仪器轴心收回的力称为抱紧力QB。缓冲碟簧采用20片碟簧对叠,外径D=20 mm,内径d=10.2 mm,厚度t=1 mm,极限行程h0=0.55 mm,高度H=1.55 mm,材料为60Si2MnA。计算K1= 0.684 。在β=0°,小碟簧并紧而未压缩时,滑键距离左端面6.29 mm,是碟簧总变形量,得单片碟簧变形量f为0.3 145 mm,同理,计算缓冲碟簧载荷为1137.127 N,代入式(22),得到抱紧力QB为108.92 N。
2.3动力传动机构设计分析
动力传动机构由电机、扭矩限制器、防反转制动器和联轴器组成,结构如图1 所示。电机由非浸油式直流电动机和行星减速器构成,置于承压壳体内,通过2根高压针引出,整机为封闭式凸缘法兰安装机构。电机可正反转,输出功率75 W,转速11 rpm,扭矩42 N·m,额定电压115 V,额定电流1.2 A。行星传动减速器具有传动比大、效率高和工作平稳等优点。
当推靠力达到最大时滚动螺母到达键槽终端,扭矩限制器开始起作用,防止扭矩超值损坏仪器,是一种保护装置。防反转制动器在推开或收拢时实现扭矩传递;在停止时,自锁住电机和滚珠丝杆轴,防止外力矩损坏电机,起保护作用。联轴器联接主动轴和从动轴使之共同旋转以传递扭矩。
3现场应用
3.1机械可靠性
推靠器于2013年7月投产使用至今,机械结构稳定,推靠臂运动灵活,极板贴靠井壁严实,故障率低,体现了很高的可靠性。推靠器配套研制有自适应的金属保护外套,在装卸和运输过程中保护纽扣电极。
3.2测井效果
在某油田喇8-某05井,图6为电成像在同一地层获得的图像,可以看出安装八臂分动推靠器所获得的图像井壁覆盖率高,地层层理显示更加清晰,且井壁覆盖率为85%时,能够获得更全面的地质信息。
四条井径曲线比两条井径携带的信息要多一些,如图7所示,在英某-58井中的相同测量井段,可以看出井壁在多个方位有不同程度的垮塌现象。
4结论
1)研制成功了八臂式分动推靠器。推靠式分动机构设计为单自由度的平行四边形传动机构和曲柄滑块机构的组合,在动力和传动机构受力分析基础上,推靠力变化范围和抱紧力符合实际应用,结构参数设计合理。在狭小的空间,推靠机构灵活自如运动,传感器阵列贴靠井壁严实,将井下地层电阻率信息准确地传上了地面。
2)八臂式推靠器投入了现场应用,测井资料的合格率为100%,,在215.9 mm井眼条件下,覆盖率达到85%,具有最大的井壁覆盖率,较大提高了观测电阻率信息的质和量,是解决复杂储层测井评价的有力手段。分动的八个井径臂,独立测量井眼的几何变化,获得的信息更真实更全面。推靠器的成功研制,提高了国产仪器的装备水平,增强国际市场的竞争实力。
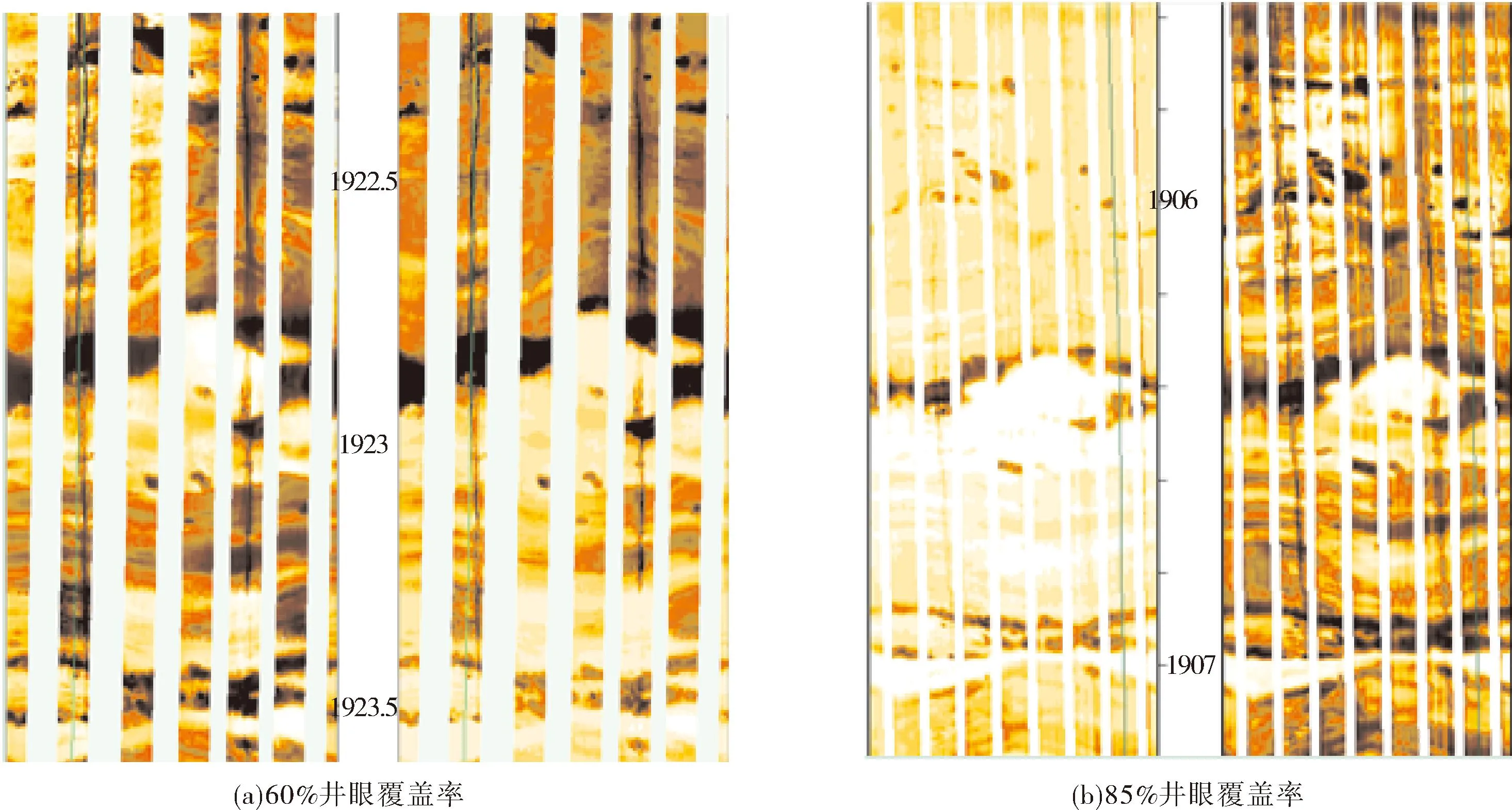
图6 不同井眼覆盖率时在同一地层获得的电成像图
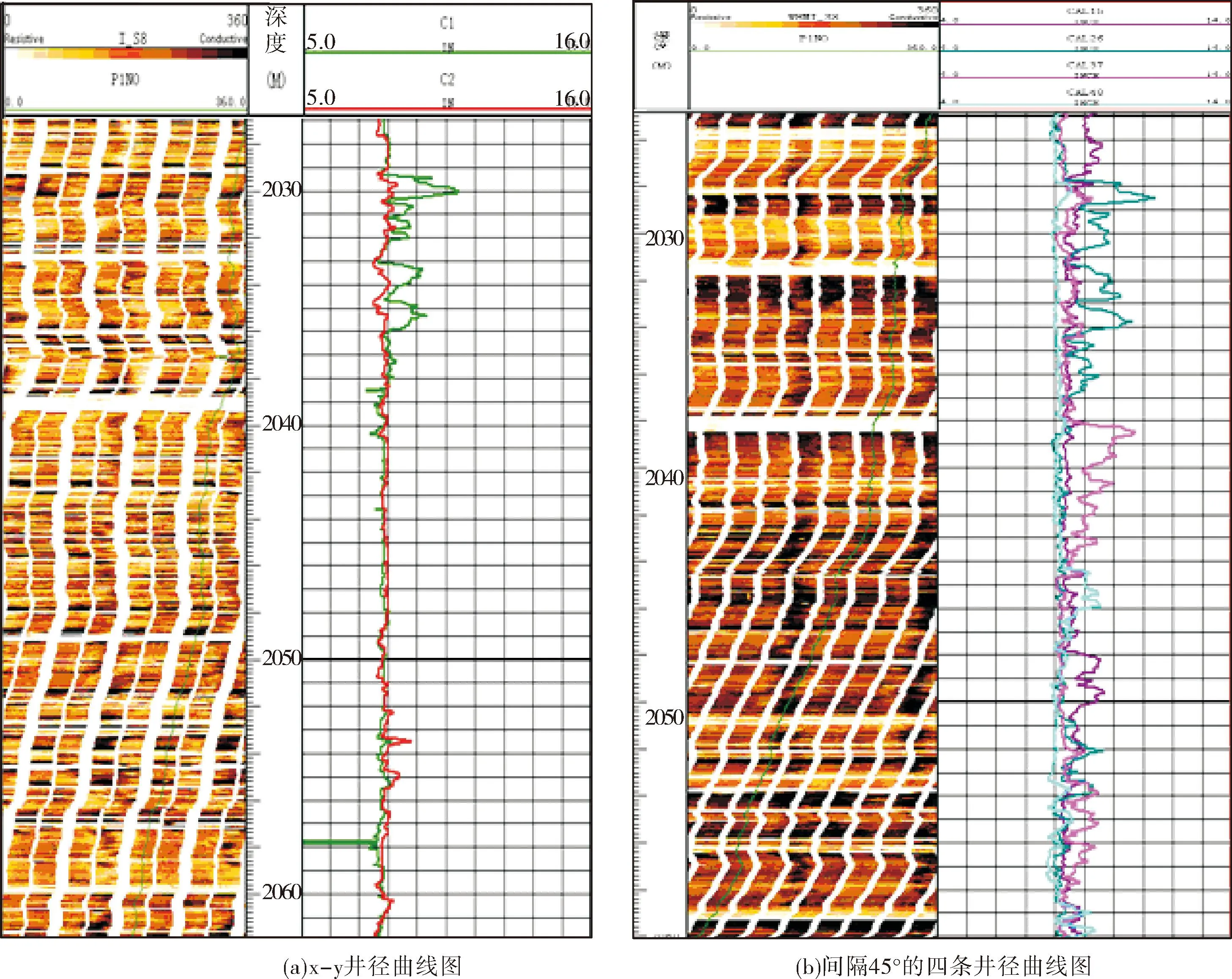
图7 不同井径传感器在同一地层获得的井径曲线图
参 考 文 献
[1] 陶宏根,王宏建,付有升.成像测井技术及其在大庆油田的应用[M].北京:石油工业出版社,2008,20-33.
[2] 肖立志,张元中,吴文圣,等.成像测井学基础[M].北京:石油工业出版社,2010,1-5.
[3] 鲍忠利,于会媛,侯洪为,等.常见测井仪器推靠器结构综述[J].石油矿场机械,2010,39(5):84-88.
[4] 覃军,龚子华,周志毅,等.新型双井径液压推靠器的研制与应用[J].石油机械,2005,33(4):51-52.
[5] 王宏建,张小平,谭鑫,等.成像测井技术研究项目总结报告[Z].大庆钻探工程公司测井公司,2012
[6] 王雷,陈立强,秦岭,等.数控机床滚珠丝杠用碟形弹簧压缩量的计算[J].世界制造技术与装备市场,2013,26(5):105-108.
[7] 徐灏,蔡春源,严隽其,等.机械设计手册(第2版第3卷)[M].北京:机械工业出版社,2004.
Analysis on Power Setting for Respectively-moving Octal-arm Sonde
WANG Hongjian,ZHANG Xiaoping,BAI Rui,WANG Xiuxia,SUN Dongli,YUAN Xiaoyan
(Well Logging Company,Daqing Drilling and Exploration Corporation,Daqing,Heilongjiang 163412,China)
Abstract:A design method for the respectively-moving octal-arm sonde was presented.The sonde′s working mode is determined according to its function to be realized,then the mechanical structure and parameters of the sonde are designed.The functional relation between the driving plate force F and the sonde′s power F0 is established based on the mechanical analysis of every component in the eccentering machinery,and the sonde′s power limit value F0 and its withdrawing force are calculated on its whole working domain by substituting the design values of its structure parameters into the function expression obtained.The power transmission mechanism is also analyzed.Field test and practical application show that the mechanical structure of the sonde and the design values of its parameters are reasonable,and its pads adhere to the sidewall tightly.This sonde has a good reliability in the field application,and its withdrawing force meets the actual requirements on its whole working domain.
Key words:caliper logging;respectively-moving sonde;octal-arm sonde;pad
基金项目:国家大庆油田原油4000万吨持续稳产重大科技专项(2011CZB-007)所属项目,项目编号:QR/A0/7-12-01
第一作者简介:王宏建,男,1966年生,教授级高级工程师,博士,1989年7月毕业于大庆石油学院测井专业,中国石油天然气集团公司高级技术专家,从事测井方法、仪器和测井资料处理解释的研究工作。E-mail:zhangxp66666@sina.com
中图法分类号:P631.84
文献标识码:A
文章编号:2096-0077(2016)03-0032-05
(收稿日期:2015-11-16编辑:马小芳)
猜你喜欢
蓄电池(2022年6期)2022-12-14
蓄电池(2022年2期)2022-04-29
科技视界(2021年4期)2021-04-14
石油管材与仪器(2020年5期)2020-11-05
中北大学学报(自然科学版)(2019年5期)2019-07-23
无机盐工业(2019年5期)2019-05-24
蓄电池(2018年5期)2018-10-19
中学生数理化·高二版(2016年10期)2016-12-24
锻压装备与制造技术(2016年3期)2016-06-05
电源技术(2015年7期)2015-08-22
