智能巡检机器人调度与路线规划能力
2016-07-19 01:16:06王金生徐洲石
长春工业大学学报 2016年3期
关键词:智能机器人
徐 波, 王金生, 徐洲石
(国网江西省电力公司检修分公司, 江西 上饶 334000)
智能巡检机器人调度与路线规划能力
徐波,王金生,徐洲石
(国网江西省电力公司检修分公司, 江西 上饶334000)
摘要:机器人在巡检过程中由于人工临时干预巡检线路而导致机器人使用不连续、无法完成既定任务的问题,在基于此全局路径规划寻找一条经过所有选定标注停靠点最短路径,经过后台算法模型得出最短、最优化的巡视路径,用自主让行方法确定需要让行区域后,将重新规划巡检路线,绕过正在检修的区域完成全站巡检。
关键词:智能机器人; 导航方式; 全路径; 自主让行
0引言
目前,变电站设备巡视过程主要通过人工+指导书巡视方式,在借助一些比如红外测温仪、可见光相机、望远镜等辅助工具实现设备巡视。在巡视过程中,需要考虑人员安全性、工作负荷率等一系列问题。而变电站智能机器人巡检系统的引入,大大提高了电力系统智能化水平,并且可以解决变电站多、人工巡视质量不高等一系列问题[1]。智能巡检机器人调度与路线规划能力是决策巡检的重要组成部分,对变电站智能巡检机器人完成全局巡视具有重要意义。
智能巡检机器人在变电站巡检过程中,经常会出现变电设备检修或者维护、施工等一系列工作,会用安全围栏将运行设备围起。由于封锁路线区域是智能机器人巡视道路,将会阻碍智能巡检机器人前进的道路,从而影响智能巡检机器人的正常巡检计划[2]。智能巡检机器人调度与路线规划能力需要从基于导航不同方式应用、全局路径规划能力、自主让行三个方面进行分析。
1基于导航不同方式应用
智能巡检机器人通过视觉导航可以完成变电站设备巡检任务,视觉导航方式是诸多导航方式的一种,具有丰富的信息量和智能化水平较高的特点,是智能机器人应用功能发展的主要方向,其中有一种实现设计方法需要在路面上作出导航线,交叉路口设置路标点,进行自主定位,再通过节点与节点之间路径规划引导智能机器人沿着导航线经由各个路径节点达到目标位置。在视觉导航控制中,对各个路径节点的合理编码和准确识别非常重要[3]。只有精准识别出路径节点,并对自身准确定位,才能通过进一步的规划路径,明确下一步的操作,从而做出正确的动作行为,完成导航任务。编码识别一般采用二进制编码方式,通过黑和白两种颜色来表示二进制的“0”和“1”,通过黑白两色的组合就能表示大量不同的二进制编码,区分各个路径节点,确定好路径编码方案后,对变电站现场巡视路径进行编号,并根据每个路径节点编号所对应的二进制编码,再根据方案要求进行变电站巡视现场道路铺设,包括交叉路口点。智能巡检机器人在巡视过程中,通过云台摄像头获取图形、图像进行二进制分析,截取编码图案类似二维码,对二维码图像进行水平方向投射,再从左到右顺次扫描确定各个二维码条纹的边界,最好根据二维码信息和像素解出二进制编码位就得出路径节点编码号。现场实践证明,智能机器人能够准确识别出各个巡视路径节点编码,进行全路线规划后,实现对自主视觉定位[4]。但缺点是由于长期暴晒在场地设备区域,易老化受损,造成某些区域无法识别的现象。
当然,其他对图像边缘锐化处理主要是加强图像中的轮廓边缘和细节,形成完整的物体边界,达到将物体从图像中分离出来或将表示同一物体表面的区域检测出来的目的。它是早期视觉理论和算法中的基本问题,也是中期和后期视觉成败的重要因素之一。图像分割是将图像分成若干部分,每一部分对应于某一物体表面,在进行分割时,每一部分的灰度或纹理符合某一种均匀测度度量,其本质是将像素进行分类。分类的依据是像素的灰度值、颜色、频谱特性、空间特性或纹理特性等。图像分割是图像处理技术的基本方法之一,应用于诸如染色体分类、景物理解系统[5]。图像分割主要有两种方法:一是鉴于度量空间的灰度阈值分割法。它是根据图像灰度直方图来决定图像空间域像素聚类。但它只利用了图像灰度特征,并没有利用图像中的其它有用信息,使得分割结果对噪声十分敏感。二是空间域区域增长分割方法。它是对在某种意义上(如灰度级、组织、梯度等)具有相似性质的像素连通集构成分割区域,该方法有很好的分割效果,但缺点是运算复杂,处理速度慢。其它方法如边缘追踪法,主要着眼于保持边缘性质,跟踪边缘并形成闭合轮廓,将目标分割出来;锥体图像数据结构法和标记松弛迭代法同样是利用像素空间分布关系,将边邻的像素作合理的归并;机器视觉软件基于知识的分割方法则是利用景物的先验信息和统计特性,首先对图像进行初始分割,抽取区域特征,然后利用领域知识推导区域的解释,最后根据解释对区域进行合并[6]。但缺点是特征量提取图形特征量较多、计算量较大,在夜间存在无法识别问题。
目前导航中,大多数机器人采用激光导航识别,相对成熟稳定,但激光识别技术在近似物体上面也存在一些缺点,易无法识别该区域(比如500 kV场地曾出现巡检机器人无法识别问题)。
建议采用至少两种以上互补的识别方法,在实现导航方式应用中能够交替使用,同时放置专家识别系统,在发生不一致情况下,能够准确依据历史和经验值数据进行分析判断,实现真正的视觉导航智能化。
2全局路径规划能力
智能机器人变电站巡检过程中,需要在坐标中寻找一条经过所有选定标注停靠点,这些停靠点坐标标定一点是最短路径[7]。智能机器人路径规划最终表现为两种机器人的运动规划:智能巡检机器人所有自由度可独立变化的完整运动规划和考虑智能机器人巡检系统非完整约束的非完整运行规划能力。而变电站巡检机器人全局最优化路径规划是一种非完整运动规划,需要对智能巡检机器人信号传输接口提高当前点,以及机器人必须经过的停靠点地理位置坐标,以保证每个停靠点都会巡视到,我们称为定点巡视点,完成巡视任务。智能机器人全局路径规划能力为最优化巡视路径,后台程序需要经过访问数据库,获取相关的巡视数据,初始化巡视路径,此时输入起始点及停靠点,经过后台算法模型(Dijkstra算法)得出最短、最优化的巡视路径,输出路径或者路径不存在可能,从而完成后台巡视任务设置[8]。
系统流程如图1所示。
3自主让行实现
智能巡检机器人提出了自主让行。该功能是运维人员在机器人后台下发巡检任务前,开启自主让行功能,后台系统会自动提示运维人员选择需要让行的区域,此时,运维人员只需要在二维地图中选中正在维修的区域,智能巡检机器人将重新规划巡检路线,开始进行巡检[9]。其系统流程如图2所示。

图2 自主让行系统流程图
标准情况下,智能巡检机器人正常巡检路线如图3所示。

图3智能巡检机器人正常巡检路线
当变电站中出现施工地段后,系统将开启自主让行功能,当智能巡检机器人确定需要让行区域后,将重新规划巡检路线,绕过正在检修的区域,从而达到自主让行完成全站巡检的目的[10]。开启智能巡检机器人施工让行路径如图4所示。
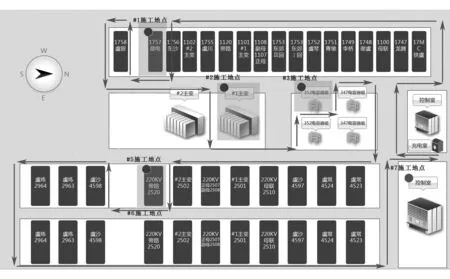
图4智能巡检机器人施工让行图
4结语
智能机器人在巡检过程中适应后台人工任务调度及现场检修的自主路径规划技术,解决了由于人工临时干预巡检线路而导致机器人使用不连续、无法完成既定任务的问题,实现机器人实时完善巡检任务能力以及不断提升智能适应运维人员的应用需求,自主让行功能在能够满足变电站各项检修作业情况下,实现变电站全年无间断巡检任务的开展。
参考文献:
[1]陈瑶,陈阿莲,李向东,等.变电站智能巡检机器人全局路径规划设计[J].山东科学,2015(1):118-123.
[2]厉广伟,夏英杰,王宁,等.机器人视觉导航路径节点的编码与识别[J].济南大学学报:自然科学版,2015,29(4):22-28.
[3]付小平.变电站智能巡检机器人应用分析[J].内蒙古科技与经济,2014(21):158-159.
[4]赵坤,赵书涛.变电站能巡检机器人视觉导航算法的研究[J].北塔软件,2014,12(1):38-41.
[5]孙国凯,韩刚.变电站巡检方式对比及其智能机器人的研究与设计[J].技术与应用,2008(7):92-94.
[6]山东电力研究院.变电站设备巡检智能移动机器人[J].机器人技术与应用,2003(3):36-37.
[7]康亮.自主移动机器人运行规划的若干算法研究[D].南京:南京理工大学,2010.
[8]鲁守饮,钱庆林,张斌.变电站设备巡检机器人的研制[J].电力系统自动化,2006,30(13):94-98.
[9]陈瑶,陈阿莲,李向东,等.变电站智能巡检机器人全局路径规划设计[J].山东科学,2015,28(1):114-119.
[10]王志明.数字图像处理与分析[M].北京:清华大学出版社,2012.
Intelligent patrol robot scheduling and route planning capability
XU Bo,WANG Jinsheng,XU Zhoushi
(National Network of Jiangxi Electric Power Company Maintenance Branch in Jiangxi, Shangrao 334000, China)
Abstract:Robot operation will be interrupted by temporary human intervention during the inspection process, thus is unable to complete the fixed tasks. Here we study the shortest path through all selected mark stops based on full path planning with a model algorithm. The independent-give-way method is used to re-plan the polling route, thus the robot can pass by the maintenance area to finish the total station polling.
Key words:intelligent robot; navigation; full path; independent to give way.
收稿日期:2016-03-10
作者简介:徐波(1978-),男,汉族,江西鹰潭人,国网江西省电力公司检修分公司工程师,主要从事电力系统自动化方向研究,E-mail:136300202@163.com.
DOI:10.15923/j.cnki.cn22-1382/t.2016.3.12
中图分类号:TN 8
文献标志码:A
文章编号:1674-1374(2016)03-0269-04
猜你喜欢
中国科技纵横(2017年2期)2017-03-24 05:59:45
电子技术与软件工程(2016年16期)2017-03-17 23:58:31
电子技术与软件工程(2016年16期)2017-03-17 00:14:25
企业文化·中旬刊(2017年1期)2017-03-15 11:46:30
电子技术与软件工程(2016年23期)2017-03-06 21:12:38
成长·读写月刊(2017年1期)2017-03-04 02:24:16
科技创新导报(2016年23期)2016-12-23 09:53:51
计算机教育(2016年10期)2016-12-19 21:06:03
科技创新与应用(2016年33期)2016-12-17 15:49:59
科教导刊·电子版(2016年24期)2016-10-29 21:22:09