AOD炉溅渣护炉氮气流量模糊自适应PID控制
2016-07-19 01:16:06徐成胜王宏志
长春工业大学学报 2016年3期
徐成胜, 邱 东, 王宏志
(1.长春工业大学 电气与电子工程学院, 吉林 长春 130012;2.长春工业大学 计算机科学与工程学院, 吉林 长春 130012)
AOD炉溅渣护炉氮气流量模糊自适应PID控制
徐成胜1,邱东1,王宏志2
(1.长春工业大学 电气与电子工程学院, 吉林 长春130012;2.长春工业大学 计算机科学与工程学院, 吉林 长春130012)
摘要:针对AOD炉溅渣护炉氮气流量控制系统中氮气流量复杂变化、非线性、时变性等问题,研究了模糊规律并应用于PID控制器。MATLAB仿真结果表明,系统具有良好的动态、静态性能。
关键词:模糊自适应;PID; 流量控制
0引言
常规PID控制具有高可靠性、算法简单、鲁棒性好等特点,而且是最早发展起来并在工业控制中普遍使用的控制策略。常规PID参数整定比较复杂,对于线性系统还能有效的控制,但是对于非线性系统的控制却表现不佳[1-3]。文中控制对象是AOD炉溅渣护炉中氮气流量系统,在AOD炉溅渣护炉工艺中,利用氧枪高速射出的氮气流对炉子底部留渣进行喷吹,溅起的炉渣分布在AOD的炉衬上,起到保护炉衬的作用。氮气流量是由气体流量阀门直接控制的,但是即使阀门开度相同,在很多时候氮气流量的大小也不尽相同,因为其流量还与储气罐压力(氮气压力)和温度等外界因素密切相关。由此看来本系统是典型的非线性系统,所以常规的PID控制器不能达到系统对氮气流量精度和稳定性的要求。系统采用模糊自适应PID控制器[4],其具体的控制原理如下:首先结合实际系统运行过程中的调节经验制定模糊知识库,根据模糊知识库转化成模糊规则;其次将模糊规则添加到PID控制中,实现PID控制器参数的在线调整。使用模糊自适应PID控制器对氮气流量系统做到很好的控制,其控制精度及系统在遇到扰动时候的调节时间,还有动态、静态性能都有很好的改善。
1AOD炉溅渣护炉工艺与氮气流量控制
1.1AOD炉溅渣护炉工艺
AOD炉即氩氧精炼炉是在铁合金生产领域中新兴的一种生产工艺。溅渣护炉工艺是提高AOD炉炉龄的重要方法之一,其操作方法简单,能耗低,生产过程安全已经被广泛地应用在冶金行业中。具体操作方法是:在冶炼过程出钢以后,首先在炉底预留一部分炉渣,必要时向其中加入相应的调渣剂,将炉渣调整到合适的粘度;其次将氧枪的高度调整到合适的位置,氧枪接到氮气的气源上,氮气以高速射流的方式喷出,这时炉底的炉渣被高速的氮气流溅起喷涂在AOD炉的内壁上[5]。当下次进行冶炼时,厚厚的溅渣层把炉衬和高温铁水隔离开来起到了保护炉衬、延长炉役的作用。
1.2氮气流量控制原理
对于气体流量的控制有两种比较常见的方法:一种是改变气体在管道的压力;另一种通过对管道的横流面积的改变来实现[6]。在本系统中采取第二种方法。横流面的改变通过阀门的开度来控制,阀门的开度又和控制器电压和电流有关系。具体控制原理如图1所示。
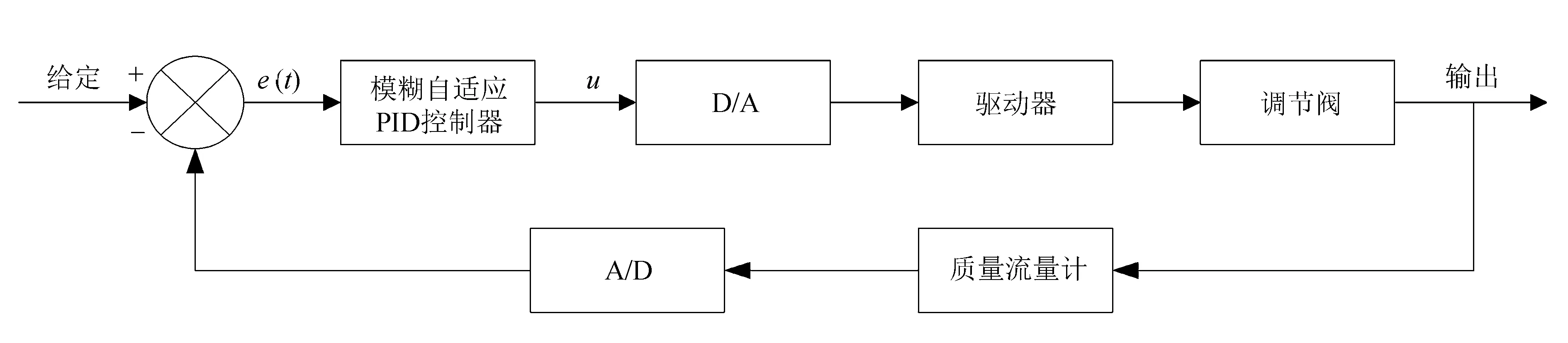
图1 氮气流量控制原理
2常规PID控制器
2.1常规PID控制器原理
常规PID控制器控制规律如下:
(1)
式中:e(k)----系统偏差;
ec(k)----系统偏差率;
Kp----比例系数,能够提升系统调节精度,加快响应速度;
Ki----积分系数,能够使系统的稳态误差减小;
Kd----微分系数,能够使系统的动态性能得到改善。
2.2常规PID控制原理图
常规PID控制原理图如图2所示。

图2常规PID控制原理图
为了追求更好的控制效果,人们从未停止对控制器的研究开发,但是由于PID控制器结构简单,参数整定法理论成熟、设计稳定、使用方便、适用对象广等优点,而且在工程应用中积累了大量的经验,所以在控制系统中仍然应用广泛。
3模糊自适应PID控制器
模糊自适应PID控制器利用模糊控制规则对常规PID参数进行在线修改,其输入量是误差e和误差变化ec,输出量是经过整定的PID控制器参数。针对不同的干扰得到不同的参数整定值。整定后的参数能够很好地控制系统,静态性能和动态性能也得到相应的提高。控制原理如图3所示。

图3控制原理图
3个参数的确定主要分以下几步:
1)通过采用Ziegler-Nichols参数预整法得到初值kp、ki、kd[2]。
2)随着系统的运行,流量向设定值逼近,此时根据图2中的模糊推理和参数修正得出比例系数、积分系数、微分系数的变化量Δkp、Δkd、Δki,从而计算3个参数修正后的值。
(2)
4模糊自适应PID控制器设计
4.1模糊语言变量和隶属度函数
系统采用二维模糊控制器,在模糊PID调节过程中,氮气流量能够迅速达到设定值,系统动态稳定性也表现的很好。该氮气流量控制系统的输入量分别为e和ec,输出量为3个控制参数,分别为Kp、Ki、Kd的整定值。根据不同工况调整PID控制器的控制参数,这样实现较为容易,控制效果也能达标。
e基本论域为[-200,200],ec的基本论域为[ -50,50],e和ec的模糊子集为E/EC={NB,NS,ZO,PS,PB},分别代表负大,负小,零,正小,正大。e和ec量化论域设置为[-4,+4],采用三角形函数作为隶属度函数[2]。
输出变量Kp的基本论域为[0,5],Ki的基本论域为[0,1],Kd的基本论域为[0,10]。对应选取Kp、Ki、Kd的模糊子集为KP/KI/KD={NB,NS,ZO,PS,PB},量化论域也设置为[-4,+4],隶属度函数采用三角函数。
4.2建立模糊控制规则和求模糊控制规则表
在氮气流量控制系统中,根据控制参数Kp、Ki、Kd对系统输出特性的影响情况,得到在不同的e和ec时,参数的自整定原则,从而可以制定出5×5×3=75条模糊控制规则,采用IF-THEN的形式如下:
IFE=NBandEC=NBTHENKP=PB
IFE=NBandEC=NBTHENKI=NB
…
IFE=PBandEC=PBTHENKD=PS
根据这些模糊控制规则建立模糊控制规则表,得到Kp、Ki、Kd,3个参数分别整定的模糊控制表见表1。
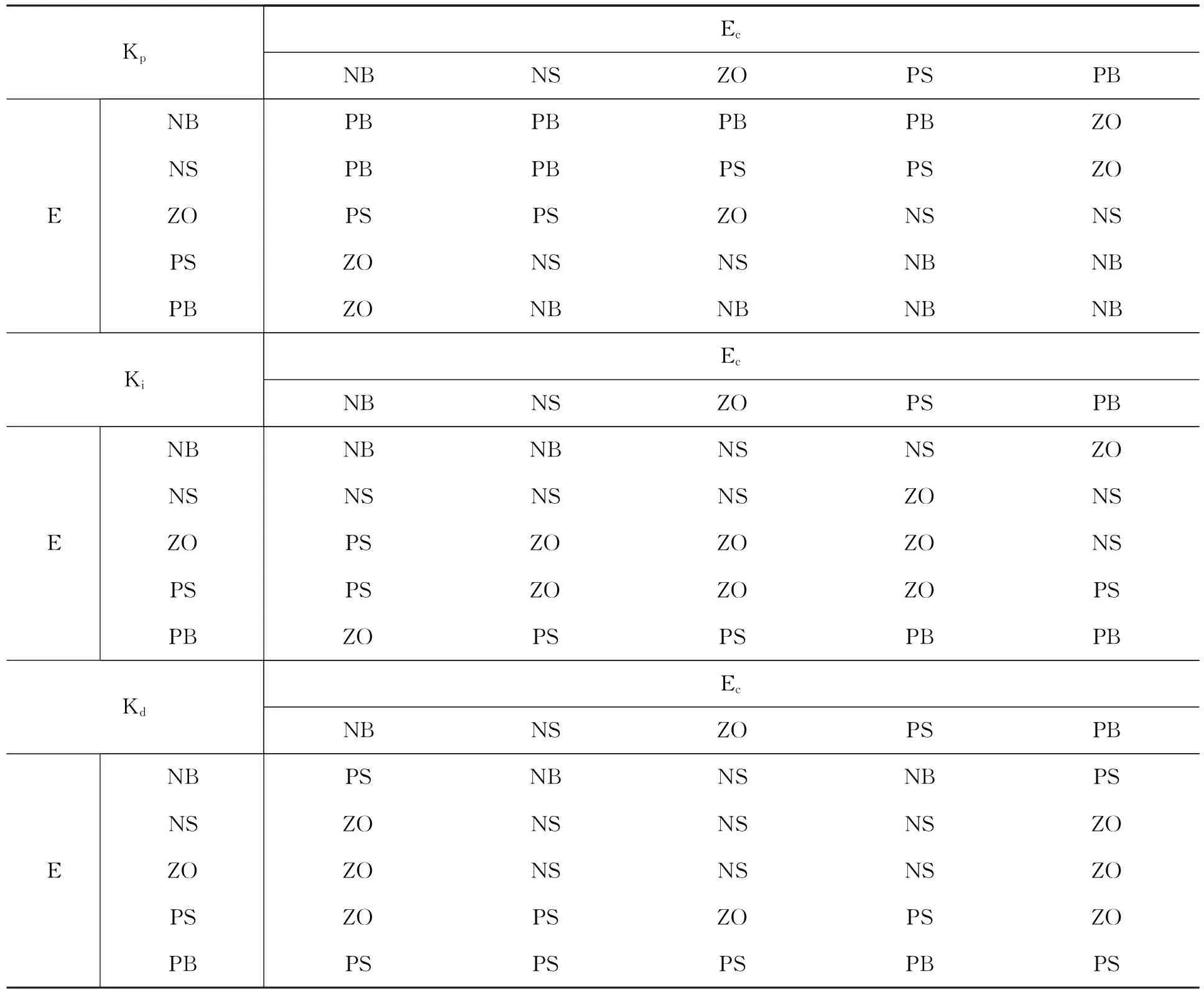
表1 模糊控制表
4.3解模糊
把语言表达的模糊量转化成精确的调整量就是解模糊,其输出值的确定依据模糊子集的隶属度计算结果。先根据某个时刻的e、ec值和隶属度函数曲线得到它们的隶属度,再依据模糊控制规则进行推理计算得出Kp、Ki、Kd各语言值对应隶属度,最后一步是采用重心法精确计算出Kp、Ki、Kd的改变量Δkp、Δki、Δkd,代入式(2)得到kp、ki、kd的精确调整值[7]。
5系统仿真与分析
采用MATLAB中的Sumlink仿真工具及模糊控制工具箱(Fuzzy Contorl Toolbox)进行仿真分析。系统的传递函数可表示如下:
(3)
式中:Kv----调节阀的流量特性常数;
Tv----调节阀的时间系数。
根据该系统的特性Kv取14.8,Tv取4s。时间系数τ取2s,代入式(3):
(4)
首先采用Ziegler-Nichols参数整定法在线设计常规PID控制器,这样能保证PID闭环控制系统稳定。然后根据模糊控制规则,在线调整控制参数。
常规PID控制器参数为:
Kp=1.49,Ki=0.018,Kd=0.5。
模糊自适应PID中,初始的PID参数为:
Kp=1.49,Ki=0.018,Kd=0.5。
仿真原理如图4所示。

图4系统仿真原理图
系统仿真图如图5所示。

图5 系统仿真图
从图中可以看出,模糊PID和自适应PID响应曲线对比结果,模糊自适应PID控制器相对于常规PID控制器有很好的非线性逼近能力和自调整性能。模糊自适应PID控制是在常规PID控制上增加了Kp、Ki、Kd的在线调整,经过调整后的比例、积分、微分系数对系统响应速度明显加快,超调显著减小。当外界因素对系统产生干扰时,本系统能迅速对PID参数进行在线调整,抑制突发的系统干扰。模糊自适应PID控制器相比常规PID控制器稳态误差更小,响应速度更快。
6结语
智能控制系统在AOD炉冶炼钢过程中特别是在溅渣护炉氮气流量控制子系统中发挥着至关重要的作用。文中所提出的模糊自适应PID控制是在原有的普通PID控制算法的基础上增加了模糊控制算法,大大提高了系统对溅渣护炉过程中氮气流量的控制速度和精度,对AOD炉冶炼过程有非常重要的作用。目前,基于模糊自适应PID控制实现的氮气流量控制系统已经在溅渣护炉控制系统中成功应用[8]。
参考文献:
[1]刘金坤.先进PID控制Matlab仿真[M].北京:电子工业出版社,2004.
[2]黄文梅,杨勇,熊桂林,等.系统仿真分析与设计Matlab语言工程应用[M].长沙:国防科技大学出版社,2001.
[3]King P J, Mandani E M. The application of Fuzzy control systems to industrial processes[J]. Automatica,1977,13(3):235-242.
[4]于欢欢,许红岩,张洋,等.模糊控制在AOD炉冶炼铬铁合金喷溅系统中的应用[J].长春工业大学学报:自然科学版,2011,32(1):1-6.
[5]郑沛然,炼钢学[M].北京:冶金工业出版社,1994.
[6]冯涛,柴苍修.基于模糊PID的传热性能测试系统流量控制研究[J].自动化仪表,2004(12):61-64.
[7]徐南平.钢铁冶金实验技术及研究方法[M].北京:冶金工业出版社,1995.
[8]张浩.精炼炉底吹氩智能控制系统的研究[D].西安:西安理工大学,2002.
AdaptiveFuzzyPIDcontrolfornitrogenflowinAODslagsplashing
XUChengsheng1,QIUDong1,WANGHongzhi2
(1.SchoolofElectrical&ElectronicEngineering,ChangchunUniversityofTechnology,Changchun130012,China;2.SchoolofComputerScience&Engineering,ChangchunUniversityofTechnology,Changchun130012,China)
Abstract:Forthefeaturessuchasnon-linear,time-variedofnitrogenflowrateinAODslagsplashingsystem,anadaptivefuzzyPIDcontrollerisstudied.SimulationresultsinMATLABshowthatthesystemshowsthegooddynamicandstaticperformance.
Keywords:Fuzzyadaptive;PID;flowcontrol.
收稿日期:2016-01-25
基金项目:长春市科技局重大科技攻关项目(2013264)
作者简介:徐成胜(1988-),男,汉族,河南信阳人,长春工业大学硕士研究生,主要从事冶金过程控制方向研究,E-mail:991923712@qq.com.
DOI:10.15923/j.cnki.cn22-1382/t.2016.3.10
中图分类号:TP273.2
文献标志码:A
文章编号:1674-1374(2016)03-0256-05