风力发电机传动系统故障诊断的机电仿真研究
2016-07-14 05:32:44时献江房钦国赵晓文杜恒司俊山
电机与控制学报 2016年7期
时献江, 房钦国, 赵晓文, 杜恒, 司俊山
(哈尔滨理工大学 机械动力工程学院,黑龙江 哈尔滨 150080)
风力发电机传动系统故障诊断的机电仿真研究
时献江,房钦国,赵晓文,杜恒,司俊山
(哈尔滨理工大学 机械动力工程学院,黑龙江 哈尔滨 150080)
摘要:为了研究风力发电机组传动系统齿轮故障在发电机电流信号中的响应过程,扩展电流信号诊断方法的应用范围。在考虑齿轮啮合刚度变化和模拟断齿故障变化特征的基础上,建立齿轮副动力学模型;以典型的双馈风力发电机为对象,建立双馈发电机及其控制系统模型。利用齿轮副和发电机的转速参数关联两个模型,构建机电联合仿真模型。在理论上研究齿轮正常或存在断齿时的电流故障特征,并与试验台模拟故障试验比较。仿真与试验结果表明,发电机定子电流可以准确反映齿轮的故障特征信息,且在离网状态下,主要会引起电流信号的频率调制特征。
关键词:风力发电机;传动系统;齿轮;定子电流;故障诊断;仿真
0引言
随着风力发电技术的发展,以单体机组大型化、集中安装和控制为特点的风电场成为主要发展方向[1]。随着风力发电机组的保有量和在役运行时间的增长,其维修成本越来越大,据统计,目前风机的维护费用占总成本的25%~30%[2]。虽然大多数风场均配备较完善的数据采集与监控系统(supervisory control and data acquisition,SCADA),但是其检测参数多为温度、电压和电流等常规静态检测参数,缺乏振动等动态监控及诊断手段,主要原因是振动诊断传感器成本高,安装与信号传输不便。为此,本文探讨一种利用发电机电信号(电压、电流)进行机械故障诊断的间接诊断方法-电机电流信号分析法,也称无传感器诊断方法。
目前,国内外已有多篇关于该方法的报道,如国外学者Royo等建立了一个异步发电机系统的简易模拟实验台,研究和分析了定子匝间短路和轴承故障的定子电流频谱[3]。而马宏忠等用分析双馈异步发电机定子负序电流来确定定子绕组匝间短路故障的来源[4]。Yang Wenxian等建立了较完善的风力发电机组故障模拟试验台,采集发电机电流、电压及功率参数,利用小波变换方法进行机组的机械故障诊断,证明了用电参数方法进行机械故障诊断方法的优点[5]。Amirat等采用定子电流的幅值解调法以及基于经验模态分析方法进行风力发电机轴承故障诊断,取得了较好结果[6-7]。这些研究成果表明,电机电流信号分析法用在风力发电机故障诊断中是完全可行的。
但是,上述文献多针对发电机本身的电气或机械故障,对于传动系统的机械故障诊断研究较少。而传动系统故障诊断,比如齿轮箱故障诊断是风力发电机组监测与诊断工作中的极为重要一环。有文献报道,一个大型风电机的齿轮箱更换工作就要花费上百万元[2]。另外,由于风力发电机是一个机械结构和控制系统异常复杂的机电一体化产品,而且安装环境较恶劣,直接以其为对象进行故障诊断研究较为困难[8]。因此,进行计算机模拟仿真和试验台模拟研究不失为一种捷径。本文主要以典型的双馈风力发电机(double fed induction generator,DFIG)传动链中的齿轮故障诊断为对象,联合发电机电气仿真模型和齿轮传动系统的机械动力学模型,通过仿真分析,在理论上探讨无传感器诊断方法的可行性,最后,通过自制的试验台进行了验证分析。
1风力发电机的主要结构及组成
DFIG发电机是目前风力发电商业市场上的主力型式[1]。一个典型的DFIG风电机组的机械组成和控制系统如图1所示,包括叶片、主轴和主轴承,增速齿轮箱和双馈发电机等。发电机定子与电网直接连接,转子通过两个背靠背的交-直-交变频器连接到电网中。当发电机转子旋转频率fr2变化时,自动控制系统控制转子励磁频率f2来保证定子输出频率f1与电网频率相等,即
f1=pnfr2+f2。
(1)
式中pn为发电机的极对数。

图1 DFIG风力发电机组的基本组成Fig.1 Basic composition of DFIG wind turbine units
2双馈风力发电机组数学模型
2.1交流异步风力发电机的数学模型
根据交流电机理论,异步发电机在d-q旋转坐标系下的动态特性可由下述方程描述[9]:
电压方程:
(2)
式中:usq,usd,isq和isd为定子电压、电流矢量的d-q坐标分量;urq,urd,irq,ird为转子电压、电流矢量的d-q坐标分量;Rs,Rr为定子、转子电阻;Ψsq,Ψrq,Ψsd和Ψrd为定、转子磁链矢量的d-q坐标分量;ωs=ω1-ωr,为d-q坐标系相对于转子的角速度,其中ω1,ωs为同步转速和转子电角速度;p为微分算子,p=d/dt。
磁链方程为:
(3)
式中:Ls,Lr和Lm为定子、转子的自感以及互感。
根据异步电机电磁转矩定义,可得d-q坐标系下异步发电机电磁转矩Te方程为

(4)
异步发电机的运动方程为

(5)
式中:TL为风力机提供的拖动转矩;ωm为风力机提供的拖动转速;J为系统的转动惯量。
2.2风力发电机传动齿轮副力学模型
由文献[10]可知,图2所示直齿轮传动副的动力学微分方程为

(6)
式中:x为沿作用线上齿轮的相对位移;C为齿轮啮合阻尼;k(t)为齿轮啮合刚度;Mr为两齿轮的等效质量;E1为齿轮受载后的平均静弹性变形;E2(t)为齿轮的误差和故障造成的两个齿轮间的相对位移。
其中Mr为
(7)
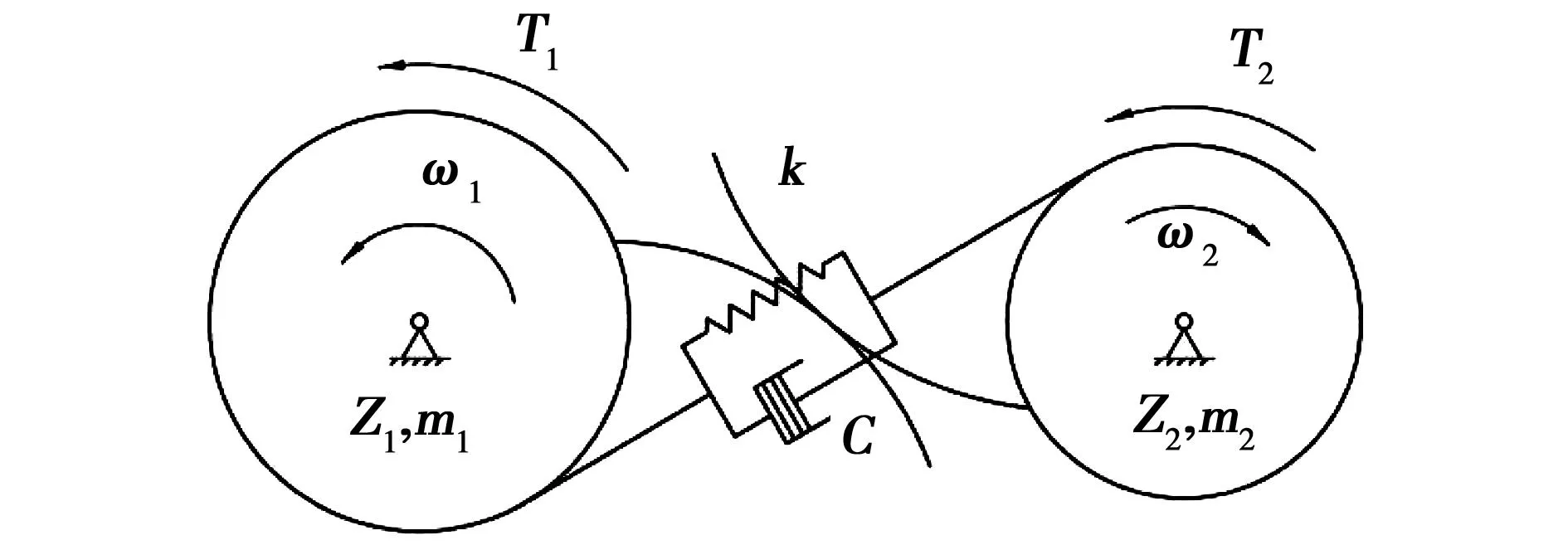
图2 发电机传动齿轮副的力学模型Fig.2 Mechanical model of generator drive gears
由式(6)可知,齿轮的振动为自激振动,该公式的左端代表齿轮副本身的振动特征,右端为激振力函数。由激振力函数可以看出,齿轮的振动来源于两部分:其中一部分为k(t)E1,它是与齿轮的误差和故障无关的常规振动,理想状态下可以认为该项为0,此时式(6)简化为:

(8)
此时,激振力仅为另一部分k(t)E2(t),这是一个调制信号,它取决于齿轮的综合刚度和故障函数的变化过程。图3为一个直齿轮的啮合刚度k(t)的变化曲线,理想状态下可近似认为是一个方波函数;E2(t)取决于齿轮的故障类型,假如出现断齿故障时,E2(t)则以该齿轮的转频周期性出现。可以说齿轮的振动主要是由k(t)和E2(t)调制的这种周期性变化引起的。
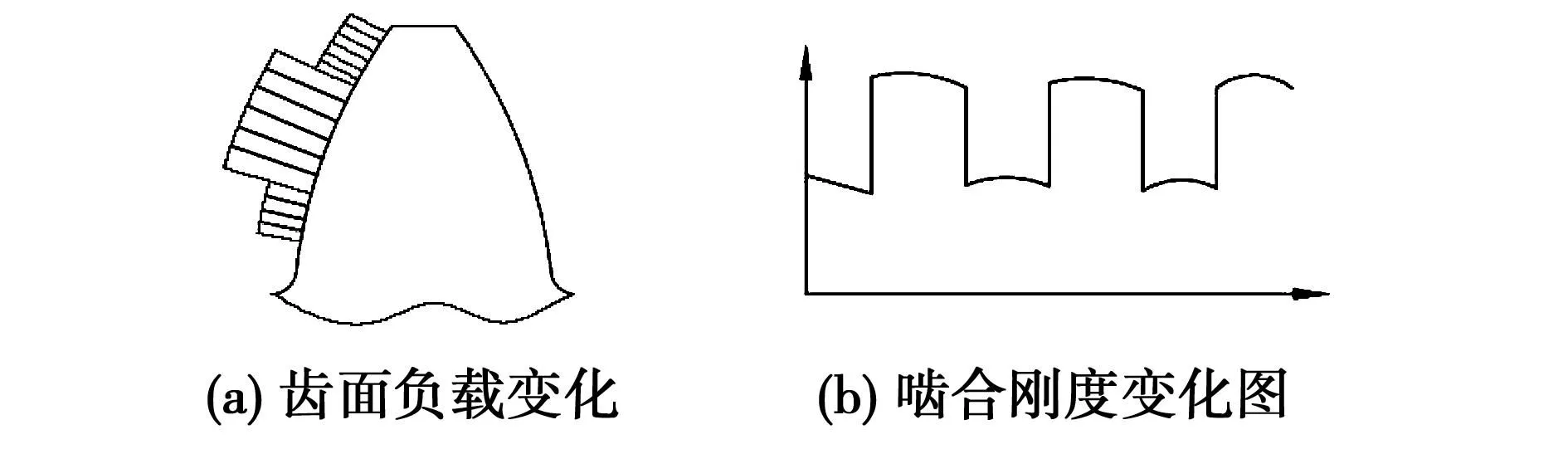
图3 齿面载荷和刚度变化Fig.3 Tooth surface load and stiffness changes
3双馈风力发电机组仿真模型
3.1风力发电机传动齿轮副仿真模型
根据振动微分方程(8) 知,只要对输出加速度作适当的二次积分则可求得相应的输出位移响应。可利用SIMULINK的基本模块库建立仿真模型如图4所示。由于发电机模型仿真时需要角速度输入,所以抽出该模型的速度参量,除以齿轮半径作为角速度波动输出。该模型可封装成一个子模块Sub_Gear供调用。

图4 发电机传动齿轮副的力学仿真模型Fig.4 Mechanical simulation model of generator drive gears
仿真时,假设大小齿轮的齿数为Z1=32,Z2=23,模数m=3,齿宽B=20,考虑电机质量时的等效质量Mr=4.5 kg,k=200~250 kN,C=300 N· s/m, 齿轮的啮合阻尼

(9)式中:ξ为齿轮啮合时的阻尼比,一般为0.03~0.17[9];k为齿轮的平均啮合刚度。系统受激振力为
F(t)=k(t)E2(t)=
10square(2πfzt)(1+sin(2πfr1t))。
(10)
式中:fz为齿轮啮合频率,等于啮合刚度的变化频率;fr1为故障齿轮轴的旋转频率。
3.2包含齿轮传动副的双馈风力发电机的机电仿真模型
交流双馈发电机的机电仿真模型如图5所示。仿真模型包括发电机模块、发电机转子变频励磁模块、负载模块、电参数测量模块和齿轮故障模拟仿真子模块(如图4所示)。双馈发电机模型由绕线式异步电动机模块代替,设置成发电机运行方式。发电机的定子绕组接三相阻性负载,采用脉宽调制(pulse width modulation,PWM)功率变频器模块给发电机转子单向励磁供电,仅模拟离网工况。
仿真系统的基本参数为:发电机额定功率3 kW,额定电压220 V AC,额定转速1 400 rpm,极对数pn=2,定子电阻、电感Rs=1.918 8 Ω、Ls=0.241 22 H,折算到定子侧的转子电阻、电感Rr=2.571 2 Ω、Lr=0.241 22 H,定子、转子互感Lm=0.234 H。参考坐标系取同步参考坐标系,初始状态均为0。
发电机的机械输入设为转速输入,取齿轮故障模拟仿真子模块的输出和一个平均转速的叠加。由于齿轮故障模拟仿真子模块的输出仅为一个速度波动成分,所以需要加上平均速度值。
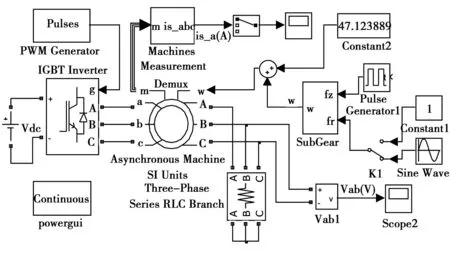
图5 双馈感应发电机及控制系统仿真模型Fig.5 DFIG and control system simulation model
4风力发电机组故障模拟实验台
模拟试验台的整体结构示意图及实物图片如图6及图7所示,由模拟风力发电机组(包括模拟风机的交流异步电动机,增速齿轮箱和DFIG发电机、发电机控制系统,以及数据采集系统和计算机组成。风机模拟电机采用1.5 kW的交流异步电机,变频驱动;采用1.5 kW的绕线式三相异步电机作为双馈感应发电机。两台电机的极对数均为3,电动机的额定转速为920 rpm。由于实验室的条件限制,并网控制存在一定的难度[11],所以发电机的定子绕组仅与三相阻性负载连接,离网运行。采用的三相变频器输出不同频率的100 V的转子相电压,单向给转子绕组励磁,仅模拟发电机的同步和次同步运行状态。采用齿轮对模拟风力发电机组的增速箱,其中电动机端齿轮齿数为34,发电机端齿轮齿数为23,增速比约为1.478。

图6 风电机组齿轮故障模拟实验台及 控制系统示意图Fig.6 Diagram of wind turbine gear fault simulation test bench and the control system
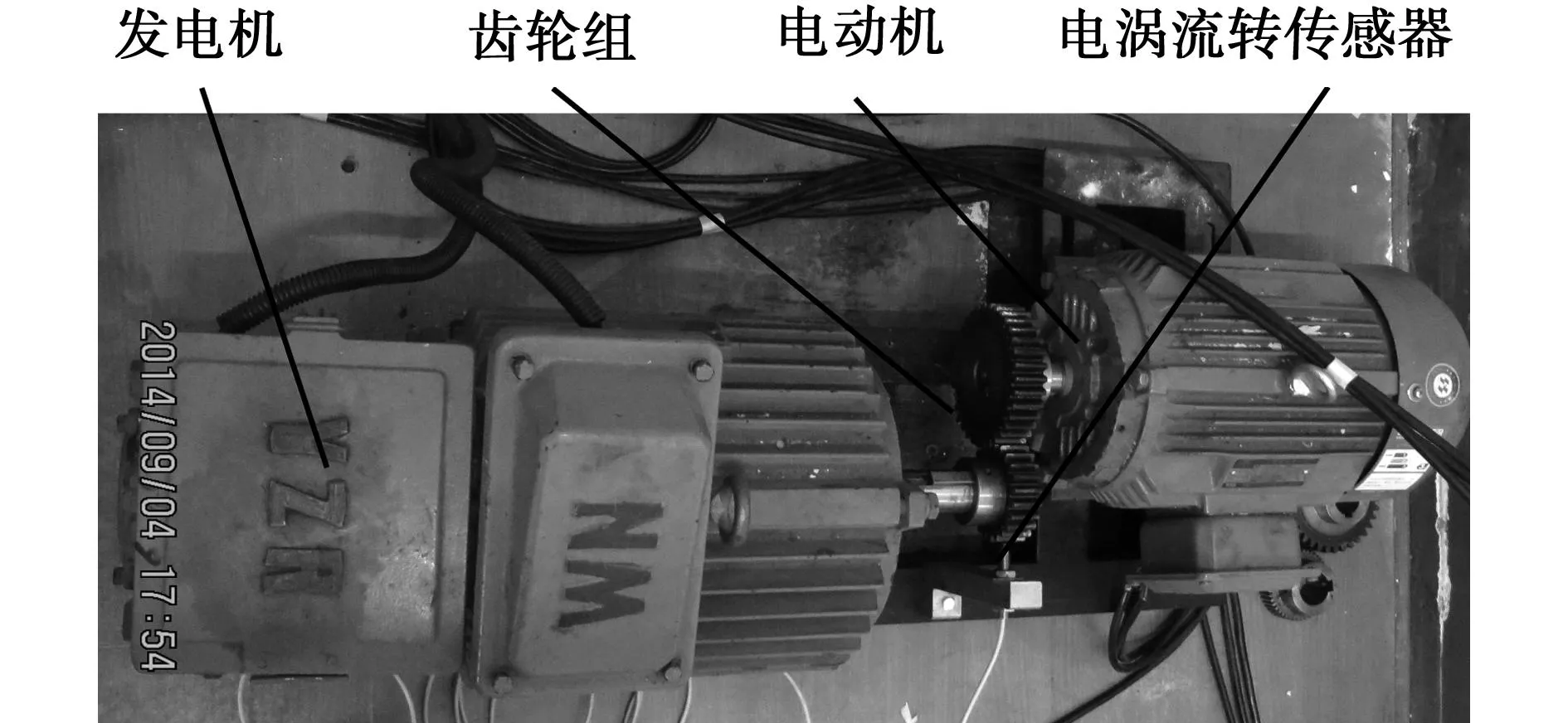
图7 风电机组齿轮故障模拟实验台照片Fig.7 Photo of the wind turbine gear fault simulation test bench
5Hilbert变换幅值和频率解调原理
设x(t)为一个实时域信号,其Hilbert变换定义为

(11)
则原始信号x(t)和它的Hilbert变换信号h(t)可以构成一个新的解析信号
z(t)=x(t)+jh(t)=a(t)ejφt。
(12)
其幅值
(13)
等于为原始信号x(t)的幅值解调信号,对其进行FFT分析即得幅值解调谱或称包络谱。
(14)
为相位解调信号。相位解调信号的导数即为瞬时频率,即瞬时频率解调信号
(15)
或
(16)
对其进行FFT分析即得瞬时频率解调谱。
6齿轮故障模拟仿真结果分析
仿真时,在齿轮故障模拟仿真子模块的fz输入端接一个方波信号,模拟k(t)的理想变化规律,方波频率为齿轮的啮合频率fz;另一个输入端接一个简谐信号或常数,其中为简谐信号时模拟齿轮有局部故障;为常数时模拟正常齿轮。
当图5中的手动开关K1切向常数1时,相当于齿轮的动力学方程(8)中的E2(t)为恒定值,即系统激励只与k(t)有关,系统为正常状态,无故障。仿真时,转子平均转速为ωr2=47.124 rad/s,转子供电频率f2=35 Hz,此时的发电频率为
f1=pnfr2+f2=

利用式(13)和式(16)计算出的幅值谱、幅值包络谱和瞬时频率解调谱如图8所示。可见定子电流信号除50 Hz的工频分量外,没有其它明显的频率成分。

图8 正常时发电机定子电流频谱 (f2=35 Hz,ωr2=47.124 rad/s)Fig.8 Spectrum of generator stator current in normal times(f2=35 Hz,ωr2=47.124 rad/s)
当图5中的手动开关K1切为简谐信号输入时,可以模拟齿轮有局部故障。若模拟大齿轮故障,只需设定故障频率为该轴转频,如fr1=3 Hz,此时的定子电流频谱如图9所示。与图8相比,在幅值谱中明显可以分辨出由于转矩和速度波动引起的发电主频率(50 Hz)上调制有边带成分,虽然没有在幅值包络谱上发现调制成分,但是在瞬时频率谱中可以清楚地得到转速波动的2.89 Hz成分,说明在离网状态下,发电机的发电频率波动主要是由断齿故障引起的速度波动导致的,其波动频率与模拟故障频率一致。

图9 模拟故障时发电机电机定子电流频谱 (f2=35 Hz,ωr2=47.124 rad/s,fr1=3 Hz)Fig.9 Spectrum of generator stator current when simulate fault(f2=35 Hz,ωr2=47.124 rad/s, fr1=3 Hz)
7齿轮模拟故障时的实验台验证
在图6所示的试验台上进行了模拟实验验证。试验时,发电机转子供电电压为100 V,频率35 Hz;电动机定子供电频率10 Hz,测得发电机定子侧的相电流信号的频谱如图10所示。 可以在看出对应的大小齿轮轴的转频2.91 Hz和4.61 Hz,其中4.61 Hz是发电机轴的转频。由于发电机的安装问题,其多少存在一定的不平衡或不对中现象,所以会出现这个频率成分。2.91 Hz为模拟风轮轴的转频,正常齿轮时,在发电机定子电流中不应该出现此频率成分,实际该轴上的大齿轮有1个模拟断齿,导致每转产生一次冲击,所以该轴的旋转频率(约2.91 Hz)就反映在发电机定子电流信号中。

图10 模拟断齿故障时发电机定子电流频谱 (f2=35 Hz,电动机定子供电频率10 Hz)Fig.10 Generator stator current signal spectrum when simulate broken teeth fault(f2=35 Hz,power frequency of motor is 10 Hz)
8结论
通过对理论仿真和试验结果的对比分析,说明本文提出的机电联合仿真模型是可行的,表明发电机电流信号能够准确反映机械故障的特征信息。另外,在离网环境下,理论仿真表明,机械故障信息主要以频率调制的形式出现,意味着发电机发电频率发生了波动现象。而幅值调制现象较弱,但是,从试验台模拟测试结果可以看出,实际上幅值调制和频率调制均是存在的,这说明仿真模型只能考虑单一的条件,而实际情况下,由于实验设备本身的各种故障及安装误差的影响,电流信号并不是模拟的理想状态,这一点通过振动等分析可以验证。
参 考 文 献:
[1]沈艳霞,李帆. 风力发电系统故障诊断方法综述[J]. 控制工程, 2013,20(3):789-793.
SHEN Yanxia, LI Fan.A survey of diagnosis methods for wind power system[J]. Control Engineering of China,2013, 20(3),789-793.
[2]陈雪峰,李继猛, 程航, 等. 风力发电机状态监测和故障诊断技术的研究与进展[J].机械工程学报, 2011,47(9):45-52.
CHEN Xuefeng, LI Jimeng, CHENG Hang, et al. Reseasch and application of condition monitoring and fault diagnosis technology in wind turbines[J]. Journal of Mechanical Engineering, 2011, 47(9):45-52.
[3]ROYO J,ARCEGA F J.Machine currentsignature analysis as a way for fault detection in squirrel cage wind generators [C]//2007 IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives, SDEMPED, 2007:383-387.
[4]马宏忠, 张志艳,张志新, 等. 双馈异步发电机定子匝间短路故障诊断研究[J]. 电机与控制学报, 2011,15(11):45-52.
MA Hongzhong, ZHANG Zhiyan, ZHANG Zhixin, et al. Research on DFIG stator winding inter-turn short circuit fault[J]. Electric Machines and Control, 2011,15(11):45-52.
[5]YANG Wenxian,TAVNER P J,CRABTREE C J,et al.Cost-effective condition monitoring for wind turbines [J]. IEEE Transaction on Industrial Electronics, 2010, 57(1): 263-271.
[6]AMIRAT Y,CHOQUEUSE V,BENBOUZID M E H. Wind turbines condition monitoring and fault diagnosis using generator current amplitude demodulation[C]//2010 IEEE International Energy Conference and Exhibition, 2010: 310-315.
[7]AMIRAT Y,CHOQUEUSE V,BENBOUZID M E H,et al.Bearing fault detection in DFIG-based wind turbines using the first intrinsic mode function[C]//19th International Conference on Electrical Machines, ICEM 2010, 2010:1-6.
[8]周真,周浩,马德仲, 等. 风电机组故障诊断中不确定性信息处理的贝叶斯网络方法[J].哈尔滨理工大学学报, 2014,19(1): 64-68.
ZHOU Zhen, ZHOU Hao, MA Dezhong, et al. Method of Bayesian network for uncertainty information processing of wind turbines fault diagnosis[J].Journal of Harbin University of Science and Technology, 2014,19(1): 64-68.
[9]熊飞,王雪帆, 华斌,等. 绕线转子无刷双馈电机的d-q轴数学模型[J]. 电机与控制学报, 2015,19(5):81-89.
XIONG Fei,WANG Xuefan,HUA Bin, et al.D-q axis mathematical model of wound-rotor brushless doubly-fed machine[J]. Electric Machines and Control, 2015, 19(5):81-89.
[10]杨建国, 姜立标, 林波,等. 变速器齿裂及轴承故障建模与故障特征提取[J]. 汽车工程, 2004, 26(2):224-228.
YANG Jianguo, JIANG Libiao, LIN Bo, et al. Modeling and feature extraction for tooth crack and bearing faults in transmission[J]. Automotive Engineering,2004, 26(2):224-228.
[11]师楠,朱显辉.风电并网的频率控制问题[J].哈尔滨理工大学学报,2012,17(2):84-88.
SHI Nan, ZHU Xianhui. The frequency control issues about wind farm grid integration[J].Journal of Harbin University of Science and Technology, 2012, 17(2):84-88.
(编辑:张楠)
Research of electromechanical simulation model of wind turbine drive train fault diagnosis
SHI Xian-jiang,FANG Qin-guo,ZHAO Xiao-wen,DU Heng,SI Jun-shan
(School of Mechanical and Power Engineering, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:In order to study the response process of the wind turbine drive train gear fault in the generator current signal,the application range of the current signal diagnostic methods was extended.On the basis of considering the gear mesh stiffness change and simulating the broken gear fault characteristics,the gear dynamics model was built.Taking a typical doubly-fed wind power generator as object,models of doubly-fed generator were set up and its control system using gears and speed parameters of generator was used to link the two models,and electrical and mechanical joint simulation model were constructed.Current fault feature was simulated in the situation of broken teeth gear and normal gear in theory,and the results were compared with the simulation fault test in test-bed. Simulation and experimental results show that the generator stator current accurately reflects the characteristics of the gear fault information, and it mainly causes frequency modulation of current signal in the condition of off-grid.
Keywords:wind turbine generation; drive train; gear; stator current; fault diagnosis; simulation
收稿日期:2014-12-16
基金项目:国家自然科学基金(51275136)
作者简介:时献江(1962—),男,博士,教授,研究方向为机械故障诊断;
通信作者:时献江
DOI:10.15938/j.emc.2016.07.011
中图分类号:TM 315
文献标志码:A
文章编号:1007-449X(2016)07-0082-06
房钦国(1990—),男,硕士研究生,研究方向为机械故障诊断;
赵晓文(1989—),男,硕士研究生,研究方向为机电系统自动化;
杜恒(1989—),男,硕士研究生,研究方向为机械故障诊断;
司俊山(1962—),男,硕士,教授,研究方向为机电一体化。
猜你喜欢
疯狂英语·读写版(2023年12期)2023-02-20 18:41:06
中国造纸(2022年8期)2022-11-24 09:43:38
一重技术(2021年5期)2022-01-18 05:42:12
电子制作(2018年10期)2018-08-04 03:24:26
科技创新与应用(2016年35期)2017-02-21 19:42:07
现代商贸工业(2016年14期)2016-12-27 16:37:19
中国高新技术企业(2016年32期)2016-12-27 11:46:40
数字技术与应用(2016年9期)2016-11-09 23:25:33
数字技术与应用(2016年9期)2016-11-09 22:09:07
科技视界(2016年18期)2016-11-03 21:44:44