
菠菜品质安全参数的拉曼点扫描快速检测方法
2016-07-12 12:59徐田锋彭彦昆李永玉郑晓春AdnanAbbas
光谱学与光谱分析 2016年6期
徐田锋,彭彦昆,李永玉,翟 晨,郑晓春,乔 璐,Adnan Abbas
中国农业大学工学院,国家农产品加工技术装备研发分中心, 北京 100083
菠菜品质安全参数的拉曼点扫描快速检测方法
徐田锋,彭彦昆,李永玉*,翟 晨,郑晓春,乔 璐,Adnan Abbas
中国农业大学工学院,国家农产品加工技术装备研发分中心, 北京 100083
针对蔬菜品质安全无损伤检测的实际市场需求,结合叶菜表面农药残留等品质安全参数的不均一性,以实验室自行搭建的拉曼光谱硬件系统为基础,开发了叶菜气吸平整装置,编写了基于LabVIEW开发平台的GUI应用程序。该系统通过设定扫描步长等参数,实现了整个菠菜样品的拉曼光谱自动点扫描检测,包括对所有扫描点的拉曼信号进行自动采集、显示和存储。检测过程中,系统软件实时监控相机、二维平移台的运行状态。同时,针对菠菜原始光谱特性编写了基于有效峰线性拟合基线校准方法的拉曼光谱荧光剔除程序,实现了对样品所有扫描点数据的自动基线校准及叠加平均处理。菠菜样品的点扫描实验结果显示,一次扫描不仅可以获得菠菜样品每一扫描点的叶绿素含量及毒死蜱农药残留等品质安全参数的分布情况,而且还可以获得整个样品各参数的平均信息。该点扫描拉曼系统有效提高了不均匀样品的品质安全参数的检测精度。
拉曼光谱; 点扫描; 农药残留; 品质安全
引 言
叶菜含有丰富的维生素、核黄素、类胡萝卜素、纤维素及其他各类营养物质[1],是人类获取营养物质的主要来源之一,其品质安全关乎每个人的健康及生命安全。近些年来,许多学者利用叶菜的光学特性、电学特性、振动特性、机器视觉和电子鼻技术进行了大量的品质安全检测研究。在这些技术中,拉曼光谱检测技术具有高精度、快速、无损的特点,在痕量物质及成分检测领域显示出了独特的优势[2-6]。
拉曼光谱是一种分子振动性散射光谱,通过对频移及相对强度分析即可获得分子振动、转动方面信息。因此,每一种物质都有特定的指纹拉曼光谱。相关研究[7-9]表明,拉曼光谱的这种特性非常适合果蔬中农药残留的无损伤检测,加之其无需制备试样、无需消耗化学试剂、所需样品量少等特点,国内外已有大量研究。
Dhakal等[10, 11]搭建了一套可用于直接检测苹果表面毒死蜱农药残留的拉曼光谱系统,系统检测限为6.69 mg·kg-1,单点检测时间小于4 s。Zhang等[12]通过共聚焦显微拉曼光谱仪(514.5 nm)和近红外傅里叶变换拉曼光谱仪(1 064 nm)采集了几种常见蔬菜的拉曼光谱,结果表明1 064 nm激发波长可有效抑制荧光,FT-Raman有望实现果蔬表面农残的直接检测。Xie等[13]应用表面增强拉曼光谱快速检测了蔬菜中甲胺磷农药残留,研究结果显示,蔬菜表面甲胺磷农残在0.01~1 000 μg·mL-1的拉曼信号有非常好的线性相关性,在4,8,15 μg·mL-13个水平下进行的回收率实验结果为86.7%~99.6%,标准偏差为1.2%~2.5%,表明该方法具有良好的可重复性。
然而,国内外运用拉曼光谱技术对叶菜进行品质安全检测的研究多数集中在单点或多点检测,即只能获得样品一个点或几个点的检测信息。叶菜的实际种植、生产、贮藏过程中施药的随机性等因素造成了叶菜品质安全参数的不均匀性,显然仅靠单点或多点检测的信息无法完全准确地把握整个样品的信息,从而造成了样品实际与检测信息之间偏差较大等问题。
以实验室自主搭建的拉曼光谱硬件系统为基础,针对叶菜表面农药残留等品质安全参数的不均一性,设计开发了用于叶菜平整的气吸装置,编写了基于LabVIEW开发平台的GUI应用程序,实现了整个叶菜样品的拉曼光谱自动点扫描检测,自动对所有扫描点的拉曼信号进行采集、极限校准、叠加平均、显示和存储。该系统一次扫描不仅获得叶菜样品每一扫描点的品质安全参数的分布情况,而且还可以获得整个样品各参数的平均信息。
1 实验用拉曼光谱采集系统
实验室自行搭建的拉曼光谱系统硬件如图1所示,包括16位高性能电荷耦合器件CCD相机(Andor Technology, Inc, South Windsor, Conn.)、拉曼光谱仪(Innovative Photonic Solutions, Monmouth Junction, N.J.)、785 nm激光器(Headwall Photonics, Fitchburg, Mass)及拉曼探针等。为了防止外部光线的影响,系统硬件均放置在可移动暗箱中,箱体分为上下两层。上层箱体主要用于检测,包括拉曼探针、二维电动平移台、叶菜气吸平整装置等。升降台被安装在二维电动平移台上,其调节精度为0.1 mm。同时,升降台的上方承载一个气吸式叶菜平整装置,用于保证叶菜平整。下层箱体放置二维电动平移台控制箱、CCD相机、光谱仪及气吸装置控制盒。电动平移台控制箱封装有运动控制卡、稳压电路等模块,发送指定字符即可控制电动平移台运动。控制箱通过USB-RS232转接线与电脑相连,便于实时监控电机状态。此外,为了提高CCD相机内置冷却器降温性能,下层箱体通过对流式吸排气风扇、散热片确保CCD相机处于接近室温的工作环境。
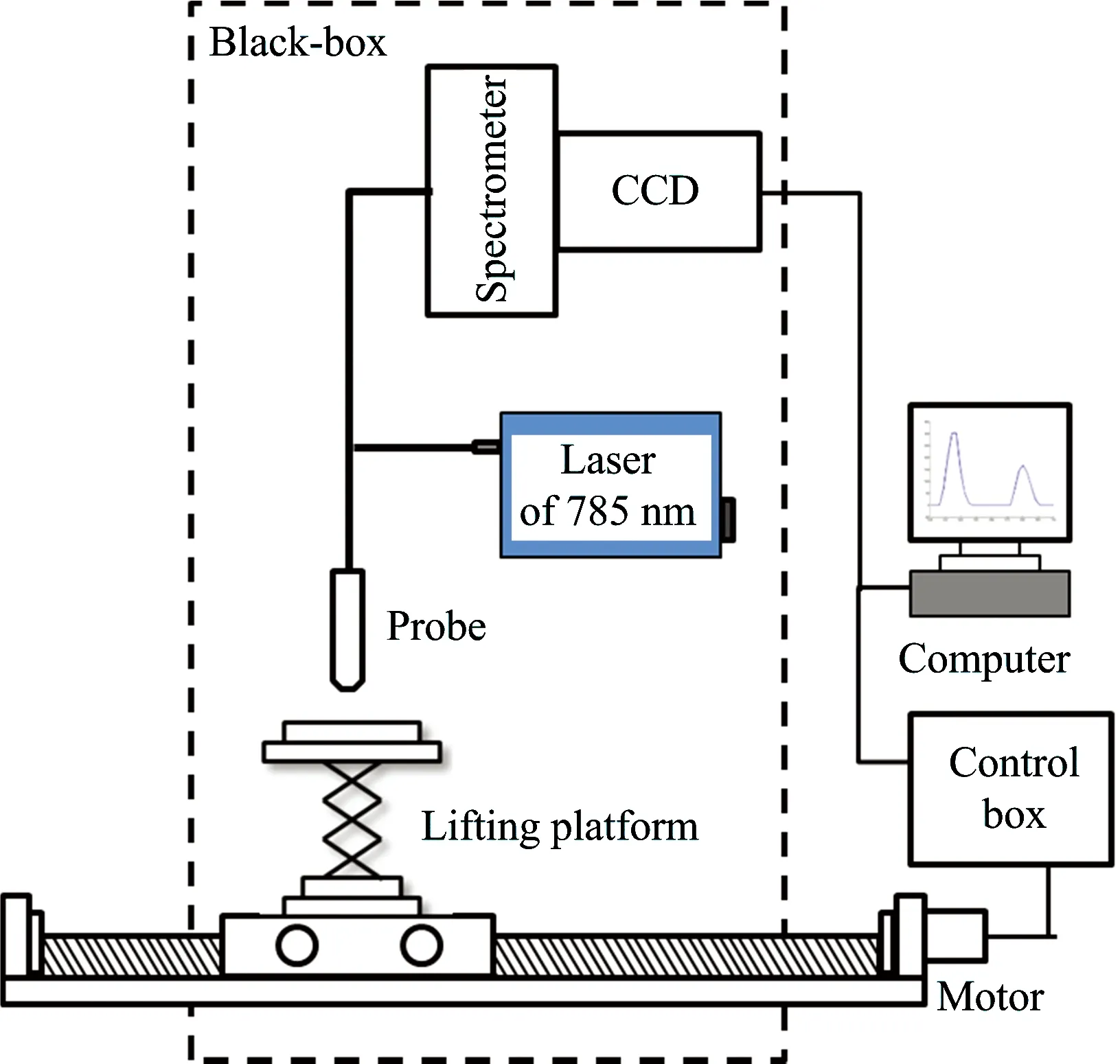
图1 拉曼系统原理图
系统所选用的拉曼探针焦距为7.5 mm,激光打在样品上的圆形光斑直径约为0.23 mm。为了减小叶菜表面不平整造成的激光散光,在原有硬件基础上,研发了一种用于光学无损伤检测的叶菜平整装置,其结构示意图如图2所示。该装置包括负压盒、底板、真空泵三个部分。负压盒上表面阵列适量2 mm大小的圆孔,材质选用无拉曼信号的氧化铝,减小了检测过程中荧光对农药拉曼信号的干扰。底板开有与升降台对应的标准通孔,用于固定该气吸装置。负压盒连通孔通过导气管与真空泵连通,其内腔室存在负压进而让叶菜紧贴于装置的上表面。
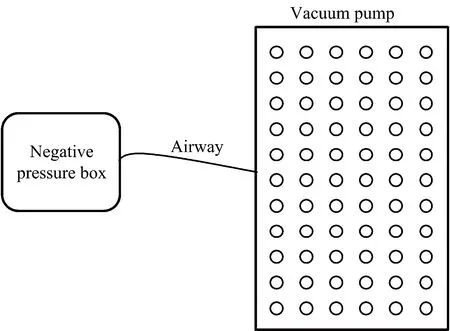
图2 气吸式叶菜平整装置示意图
2 拉曼光谱点扫描方法
2.1 平移台步长与速度计算
系统平移台采用GCD-0301M步进电机(大恒新纪元科技股份有限公司)二维级联方式连接,可实现二维方向的单独或同时控制。影响平移台单步位移的因素有电机细分比、步距角及机构传速比等,详细公式如下
其中,s: 平移台步长,mm;d: 丝杠导程,4 mm;θ: 电机步距角,1.8°;n: 电机细分比,20;i: 机构传速比,1。
因此,选用的平移台单脉冲的理论位移是0.001 mm。而实际中,单脉冲会造成步进电机打摆,难以实现连续精确的控制。根据实际精度要求,选择单步执行100个脉冲即0.1 mm作为系统扫描的最小间距。
叶菜品质安全参数的检测趋向准确、快速、无损方向发展,缩短系统样品检测时间尤为重要。图3是该系统光谱采集与电机驱动的时间脉冲图,t表示系统单点检测的时间,其包括光谱采集时间t0和电机驱动时间t1。在t0时间内,系统只允许光谱采集,平移台处于静止状态。而在t1时间内,CCD通过关闭快门禁止外界光进入相机,平移台依照特定指令迅速移动到下一个目标点等待检测。同时,系统软件将临近一次采集到的光谱数据保存于txt文件中,并在操作界面绘图区实时显示当前检测点的光谱曲线。为了缩短检测时间,选用平移台最大直线速度10 mm·s-1为其瞬时移动速度,发送指令@FF即可实现精确控制。
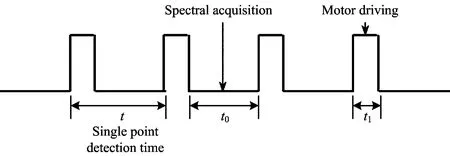
图3 拉曼光谱采集与电机驱动时间脉冲图
2.2 扫描模式
系统选用点扫描模式如图4所示,其起始点位于目标区域的一角,是一种折线形的逐行扫描方式。从起始点开始,X轴方向平移台以一定的步长向右逐点扫描直至达到预设值即完成一行扫描,此时,X方向电机停止动,Y方向平移台向前移动单步长后,X方向平移台继而向左扫描,以此类推完成整个目标区域的扫描。由于该扫描模式具有编程简单、易于图像合成等优点,本控制优选此扫描的方式。
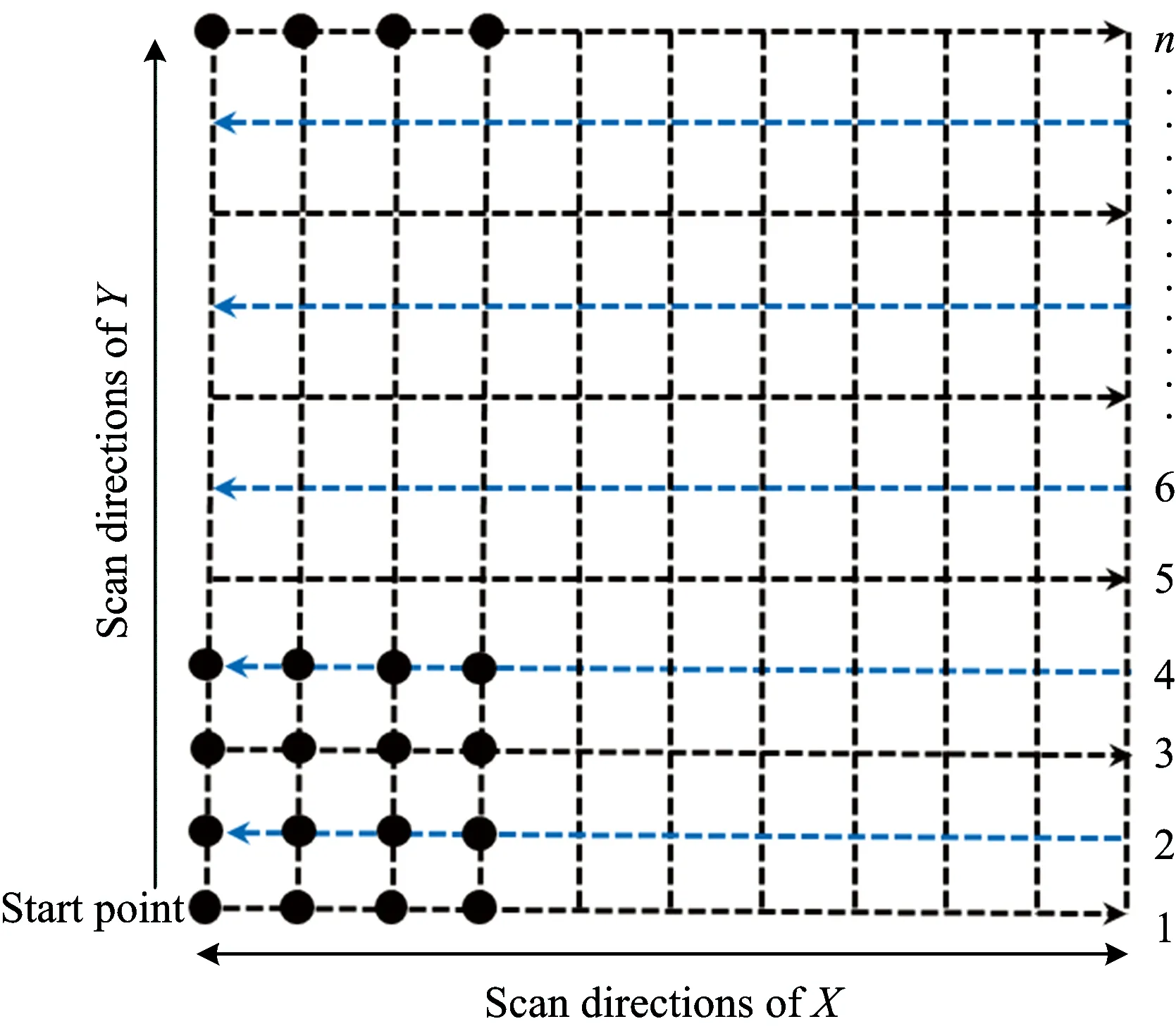
图4 点扫描模式
2.3 系统矫正
拉曼光谱仪分光后,产生的分光带被CCD上的1 024个探测器探测,因此需要通过对相机像素点的矫正把像素坐标转换成频移坐标。常用的拉曼坐标转换方式是通过具有丰富拉曼峰的标准物质进行拟合矫正。标品萘是目前公认的用于拉曼矫正的物质之一,其丰富的拉曼峰及稳定的散射频移为系统精度提供了可靠的保障。图5(a)是采集到的标品萘与CCD像素点对应的拉曼光谱,图中标出了7个拉曼峰对应的实际拉曼频移量。通过对比发现,相机像素点坐标与实际拉曼频移之间存在良好的二次多项式关系,其拟合决定系数为1,如图5(b)所示。矫正后CCD相机能探测的拉曼光谱范围为-186.45~2 345.72。
2.4 样品自动点扫描软件
基于LabVIEW开发平台编写了一个可视化图形用户界面(GUI),应用程序流程图如图6所示。系统软件自动初始化CCD相机,并打开相机内置冷却器降温直至满足预设温度。选用的CCD相机最大降温范围-50~-70 ℃,以保证系统较低的暗电流及较好的光谱稳定性。降温结束后,软件调用相应函数对硬件进行参数设置,如初始化变量、设置读取模式、采集模式等。此时,软件处于待命状态,用户可根据需要随时更改点扫描的步长和总距离。
编写的GUI界面如图7所示,包括相机设置模块、电动平移台参数设置模块、系统操作模块、数据保存模块、硬件状态及光谱曲线显示模块。其中,相机设置模块包括CCD温度、曝光时间、相机探测器中心位置及高度等的设置。为保

图5 拉曼频移矫正
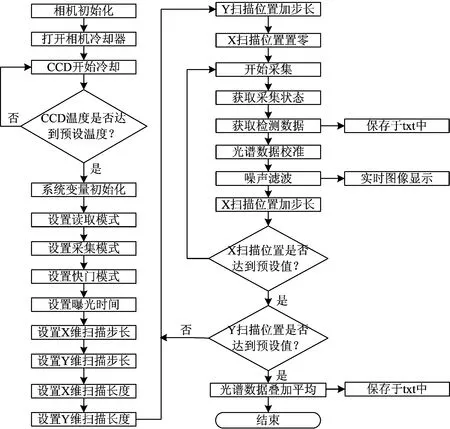
图6 软件系统流程图
证光谱仪及相机最佳的信噪比(SNR),CCD相机开发商提供了Single-track数据读取模式。在这种读取模式下,CCD相机探测器仅从选取的目标位置获取数据。电动平移台参数设置模块主要包括电机步长和扫描长度设置,单维扫描最大长度为200 mm,扫描步长精度为0.1 mm。界面下方还设有状态显示栏,包括CCD初始化、当前CCD温度以及电动平移台相对初始状态的位置等,当鼠标在光谱曲线上捕捉到某点后,会实时显示捕捉点的坐标。

图7 系统数据采集软件操作界面
打开应用软件,通过选择对应串口使计算机与二维平移台通讯。当相机内置温度达到预设温度后,点击开始采集,程序将连续采集数据并保存。数据以二维数组的形式保存为txt文件,保存路径为指定目标文件夹。检测过程中,可根据实际需要点击暂停/继续按钮选择暂停或继续。按下中止键或完成整个样品检测,二维电动平台将自动还原初始位置并把系统所有变量初始化(CCD温度除外)。当所有样品检测结束后,点击退出程序,程序将自动关闭相机及应用程序。
3 基线自动校准及叠加平均处理
拉曼光谱荧光剔除(基线校准)是拉曼光谱数据处理的一个难点[14],基线校准的好坏直接影响系统检测的精度。本研究拉曼光谱荧光剔除采用基于有效波峰临近阈值范围内光谱数据直线拟合替换的方法(以下称为有效峰线性拟合法),通过判断波峰两侧有无波谷从而确定直线拟合的起始位置,进而通过直线拟合方程产生并替换原始光谱中波峰位的数据。基于以上原理,编写了有效峰线性拟合基线校准的程序。从图8中可以看出,尽管原始光谱在634.2和679.7 cm-1处的拉曼信号非常弱,但该方法仍能正确识别有效拉曼峰位置并进行直线拟合。基线校准后,曲线中各峰位及形状与原始光谱中的峰位和形状几乎没有差别,可以很好的剔除复杂荧光背景的光谱曲线的荧光,提高了系统检测的精度。因实际检测过程有时需要逐点预测样品的品质安全参数,该程序采用了先对样品所有扫描点数据进行基线校准,再进行对所有扫描点的叠加平均处理的方法。
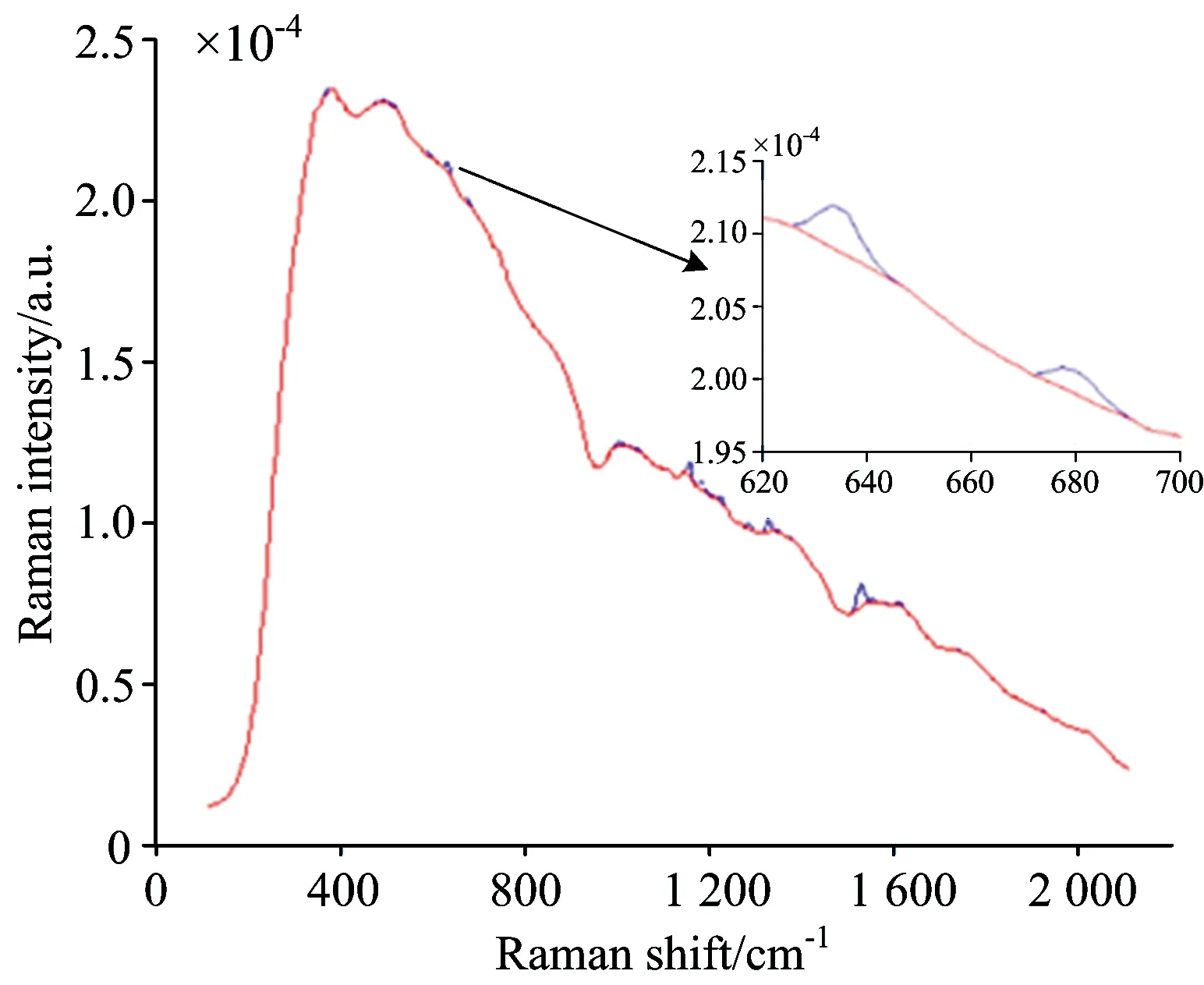
图8 弱的拉曼信号光谱的基线校准
4 菠菜样品拉曼光谱点扫描实验
4.1 样品制备
用去离子水配制4 800 mg·kg-1毒死蜱农药水溶液,取20 mL溶液置于一个小型迷雾喷枪中。将市售菠菜用去离子水洗净并自然干燥后,采用迷雾的方式模拟田间农药的施药过程制备实验样品。
4.2 拉曼光谱采集
将样品依次放置于气吸平整装置上,微调升降台确保拉曼探针到菠菜样品的距离为7.5 mm。打开拉曼点扫描系统软件,设置二维方向扫描间距均为2 mm、扫描长度为20 mm、激光功率为350 mW、相机曝光时间为2 s。为了确保较高的信噪比(SNR),所有数据均在CCD的内冷却温度保持在-50~-60 ℃之间采集。
4.3 结果与分析

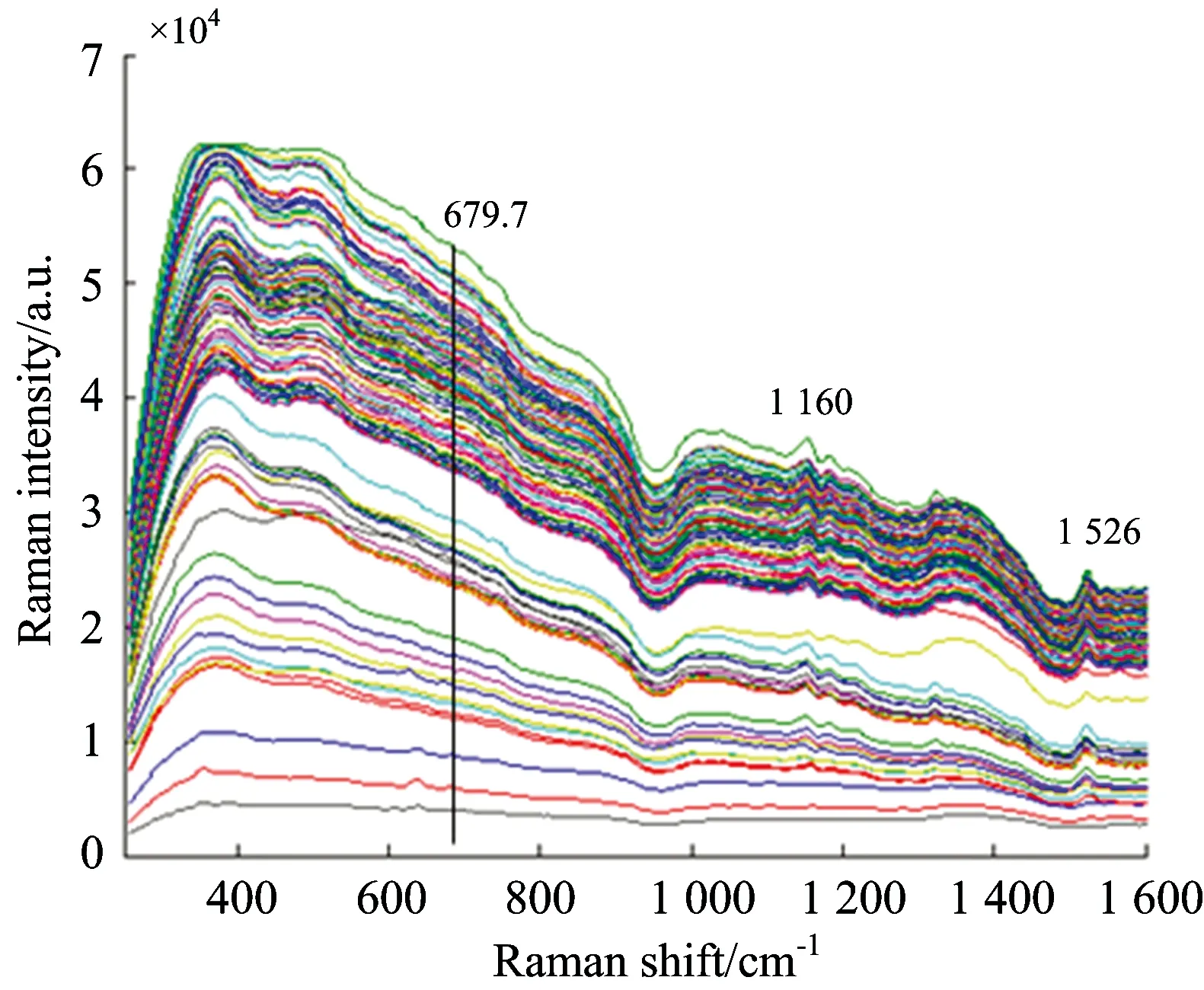
图9 在不同检测点的样品原始光谱
通过对实验数据对比发现,系统检测低浓度毒死蜱农药残留时存在一定的拉曼频移,即679.7 cm-1处峰可能会漂移到677.1和682.4 cm-1处。数据处理过程中,通过基于MATLAB自行编写的峰位校正程序自动校正了存在漂移的有效拉曼峰。考虑到实际检测过程是逐点预测残留浓度,因此程序采用了先对单个样品所有数据进行基线校准再进行叠加平均的处理方法。
程序经过有效峰线性拟合法剔除荧光背景及光谱叠加平均后的光谱曲线如图10所示。可以明显看出,经过数据处理后的光谱曲线在679.7,743.6,1 160,1 189,1 217,1 288,1 326,1 526 cm-1处存在明显的拉曼峰,说明所采用的荧光剔除方法正确的识别并处理了原始光谱中许多微弱的拉曼信号。其中,679.7和1160,1 526 cm-1分别是毒死蜱农药和叶绿素的拉曼特征峰,743.6,1 189,1 217,1 288,1 326 cm-1可能与菠菜内部品质如维生素、固形物含量等成分有关。
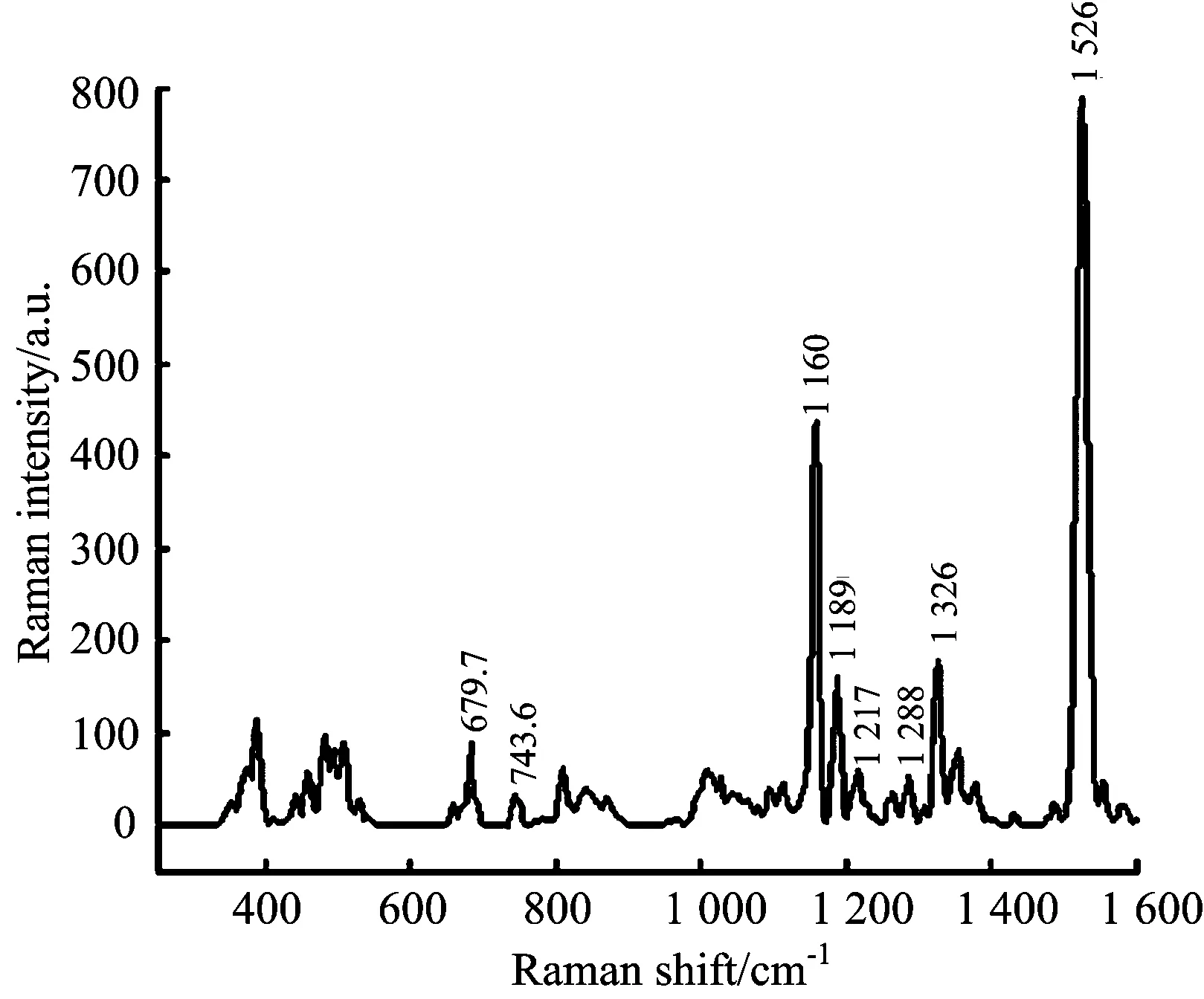
图10 去除荧光背景和平均处理后的光谱图

且仅有少量扫描点没有出现叶绿素的特征峰,其原因是在这些扫描位置激光打到了菠菜的脉络或干瘪处。
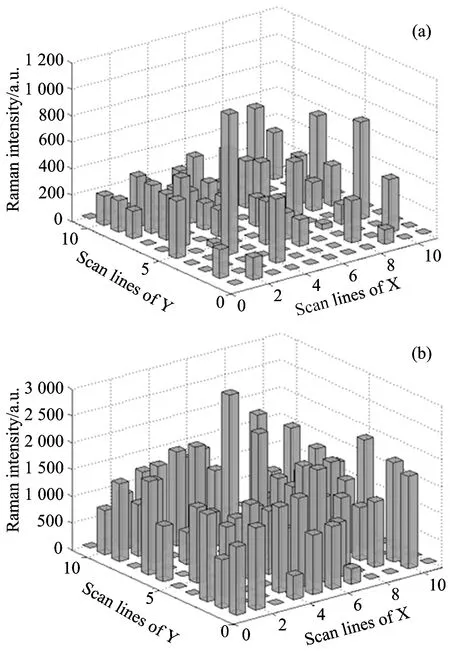
图11 拉曼峰强度的柱状图
5 结 论
以实验室自行搭建的拉曼光谱硬件系统基础上研发的用于叶菜品质安全检测的点扫描拉曼光谱系统,对检测样品进行自动逐点扫描、信号采集、基线校准、叠加平均、显示和存储。即可获得样品每一扫描点的叶绿素含量及毒死蜱农药残留等品质安全参数的分布情况,而且还可以获得整个样品的各参数平均信息。该拉曼光谱点扫描系统有效提高了叶菜等不均匀样品品质安全参数的检测精度。
[1] WU Jian-fan, WANG Yun-hua(吴建繁,王运华). Chinese Bulletin of Botany(植物学通报), 2000, 17(6): 482.
[2] Hu J Y, Zheng Z H, et al. Deng, Bull Environ. Contam Toxicol., 2011, 86(1): 95.
[3] Lavagnini I, Urbani A, Magno F, et al, Talanta, 2011, 83: 1754.
[4] Ortelli D, Edder P, Corvi C, et al. Food Additives and Contaminants, 2005, 22(5): 423.
[5] ZHU He, JI Ming-shan(朱 赫,纪明山). Chinese Agricultural Science Bulletin(中国农学通报), 2014, 30(4): 242.
[6] LI Xiao-ting, WANG Ji-hua, ZHU Da-zhou, et al(李晓婷,王纪华,朱大洲,等). Transactions of the Chinese Society of Agricultural Engineering(农业工程学报), 2011, 27(Supp.): 363.
[7] FAN Yu-xia, LAI Ke-qiang, HUANG Yi-qun(樊玉霞,赖克强,黄轶群). Spectroscopy and Spectral Analysis(光谱学与光谱分析), 2014, 34(7): 1859.
[8] Li Y, Dhakal S, Peng Y. Journal of Food Engineering, 2012, 109: 127.
[9] Moros J, Armenta S, Garrigues S, et al. Analytica Chimica Acta, 2005, 543: 124.
[10] Dhakal S, Li Y, Peng Y, et al. Journal of Food Engineering, 2014, 123: 94.
[11] Sagar Dhakal, Li Yongyu, Peng Yankun, et al. International Agricultural Engineering Journal, 2013, 22(3): 62.
[12] Zhang P X,Zhou X F,Cheng A Y S,et al. Journal of Physics: Conference Series,2006,28: 7.
[13] Xie Y,Mukamurezi G,Sun Y,et al. European Food Research and Technology,2012,234(6): 1 091.
[14] Jianwei Q, Kuanglin C, Moon S K. Proc SPIE, 2011.
[15] WANG De-kai, PEI Ke-mei, LIU He-qin(汪得凯, 裴克梅, 刘合芹). Chinese Journal of Spectroscopy Laboratory(光谱实验室), 2008, 25(1): 1.
(Received Apr. 13, 2015; accepted Aug. 25, 2015)
*Corresponding author
A Point Raman Scanning Method for Rapidly Detection of Spinach Quality and Safety Parameters
XU Tian-feng, PENG Yan-kun, LI Yong-yu*, ZHAI Chen, ZHENG Xiao-chun, QIAO Lu,Adnan Abbas
College of Engineering, China Agricultural University, National Research and Development Center for Agro-processing Equipment, Beijing 100083, China
According to actual market demand for nondestructive detection of vegetables quality and safety, combined with the heterogeneity of quality and safety parameters such as pesticide residues on leaf vegetables surface and to realize the automatic point scanning for the whole leaf vegetables samples, a suction device based on laboratory (self-designed) Raman spectroscopy hardware and a GUI application software based on the LabVIEW development platform were developed. This system can test the Raman spectroscopy of the whole spinach including the automatic collection, display and storage of the Raman signal of all the scanned points by set up different scan step. A new method to remove the Raman spectrum background was proposed based on data replacement with linear equation at the range of threshold spectrum on both sides of the effective peaks according to the characteristics of spinach original spectra. Its principle is to determine the starting position of linear fitting by judging whether there is trough on both sides of the crest, and then to generate and replace the original spectra data in peak position through the linear fitting equation. Spinach samples were used for the experiment showed that the chlorophyll content and distribution of chlorpyrifos pesticide residue on each scanning point can be obtained after scanning. Therefore, the point scanning Raman system could improve detection accuracy of the quality and safety parameters for the non-uniform samples effectively.
Raman spectroscopy; Points scan; Pesticide residues; Quality and safety
2015-04-13,
2015-08-25
国家科技支撑项目(2014BAD04B05)资助
徐田锋,1993年生,中国农业大学工学院硕士研究生 e-mail: xtf_aden@163.com *通讯联系人 e-mail: yyli@cau.edu.cn
O657.3
A
10.3964/j.issn.1000-0593(2016)06-1765-06
猜你喜欢
南方农机(2022年20期)2022-10-20
辽宁省博物馆馆刊(2021年0期)2021-07-23
今日农业(2020年23期)2020-12-31
中国粮油学报(2018年12期)2018-03-19
益寿宝典(2017年28期)2017-12-09
百姓生活(2017年4期)2017-04-20
光学精密工程(2016年1期)2016-11-07
潍坊学院学报(2016年6期)2016-04-18
原子与分子物理学报(2015年3期)2015-11-24
原子能科学技术(2014年3期)2014-02-28
- 光谱学与光谱分析的其它文章
- 基于光声光谱联合主成分回归法的血糖浓度无损检测研究
- Structural, Morphological and Optical Properties of Well-Ordered CdO Nanostructures Synthesized by Easy-Economical Chemical Bath Deposition Technique
- Sensitivity Enhancement in Uranium Determination by UV-Visible Spectroscopy Using Ion Imprinted Polymer
- 采用小波分析方法降低可调谐半导体激光吸收光谱技术测量下限的实验研究
- 钠钾替代条件下不同基因型棉花叶片的FTIR光谱研究
- 近红外高光谱成像技术用于转基因大豆快速无损鉴别研究