直升机前视地形告警算法研究
2016-07-01 01:06:20周成中陆洋
飞行力学 2016年3期
周成中, 陆洋
(南京航空航天大学 直升机旋翼动力学国家级重点实验室, 江苏 南京 210016)
直升机前视地形告警算法研究
周成中, 陆洋
(南京航空航天大学 直升机旋翼动力学国家级重点实验室, 江苏 南京 210016)
摘要:为了更好地利用直升机地形感知与告警系统,减少可控飞行撞地事故的发生,提出了一种适用于直升机地形感知与告警系统的前视地形告警算法。首先介绍了直升机前视地形告警的基本原理,并给出了前视告警包线的设计流程;然后提出了前视告警包线下视边界、前视边界、上视边界和横侧边界的确定方法;最后构建仿真算例进行了仿真验证。仿真结果表明,提出的算法可以在直升机飞行撞地前提前预警。
关键词:地形感知与告警系统; 可控飞行撞地; 前视地形告警
0引言
飞行器在无任何机械故障的情况下,由于缺乏对周围地形的感知而发生飞行撞地事故称为可控飞行撞地(Controlled Flight Into Terrain, CFIT),CFIT一直是现代商用航空飞行事故的主要原因之一。为了减少CFIT事故,研究人员在20世纪70年代开发了近地告警系统(Ground Proximity Warning System, GPWS)。随着数字地图技术的发展,Honeywell公司在20世纪90年代成功研制了地形感知与告警系统(Terrain Awareness and Warning System, TAWS)。该系统具有前视告警功能及可提高飞行员对外界感知的地形显示功能。自推出TAWS以来,民机的CFIT事故大大减少。
直升机的飞行环境决定了其发生CFIT事故的概率不比固定翼飞机低,因此需要发展直升机地形感知与告警系统(Helicopter Terrain Awareness and Warning System, HTAWS)。国外对HTAWS的研究则始于上世纪末,发展至今已经比较成熟,且已开发出多款产品投入应用,如美国Honeywell公司的MKXXII、Sandel公司的ST3453H和Rockwell Collins公司的Helisure等;而国内针对HTAWS的研究才刚刚起步[1-2]。不言而喻,告警算法是HTAWS功能实现的核心,然而国外尚未公开发表此方面的文献,仅有的一些资料也多为功能描述,未给出具体算法。本文参照固定翼飞机TAWS的前视告警算法结构[3-5],提出一种适用于直升机且具有工程可实现性的前视地形告警算法,并结合美国航电规范DO-309中的算例进行了仿真验证,初步验证了该算法的有效性。
1HTAWS前视地形告警包线设计
1.1HTAWS前视地形告警工作原理
HTAWS前视地形告警的工作原理是基于直升机飞行状态,在其前进方向空间上生成一个虚拟的三维安全包线,同时获取数据库提供的地形、障碍物数据信息,实时比较告警包线与周边地形的空间位置关系。当告警包线与周边地形接触时即触发告警,HTAWS同时给出灯光告警和语音告警。此外,HTAWS还具有地形/障碍物显示功能。HTAWS的工作原理如图1所示。
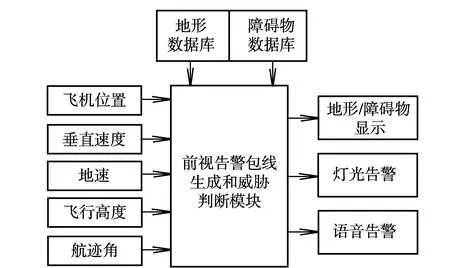
图1 HTAWS工作原理Fig.1 Working principle of HTAWS
HTAWS前视告警分为警戒告警和警告告警两个告警级别,分别对应于告警包线的外包线和内包线。当外包线与周边地形接触时触发警戒告警,告警灯光为黄色,告警语音为“Caution Terrain”;当内包线与周边地形接触时触发警告告警,告警灯光为红色,告警语音为“Warning Terrain”。图2为典型的HTAWS前视告警包线示意图。


图2 HTAWS前视告警包线Fig.2 Forward-looking alerting envelope of HTAWS
1.2HTAWS前视告警包线设计流程
HTAWS算法中,前视告警包线生成是其最重要的部分。前视告警包线包括内外两层,每层告警包线均由4部分组成,即下视边界、前视边界、上视边界以及侧边界。图3给出了HTAWS前视告警包线的设计流程。

图3 HTAWS告警包线设计流程图Fig.3 Design process of alerting envelope of HTAWS
直升机飞行过程中应该在其下方预留一段安全距离,即最小安全高度(ΔH),直升机正常飞行时应不低于这一高度,否则将触发告警。同理,直升机飞行过程中,其前方也应该预留一段安全距离,以避免与前方障碍地形相撞,该安全距离即前视距离(L)。飞机前方遇到障碍地形时,可以选择转弯改出,直升机同样具有这一特性,因此可以将前视距离设为直升机协调转弯时的转弯半径。最小安全高度和前视距离为前视告警包线的重要特征参数,也是设计告警边界的基础。
下视边界、前视边界和上视边界共同组成了告警包线的纵向边界,内、外包线的纵向边界设计流程完全一致,仅某些特征值的数值大小有所差别。内包线特征值的安全裕度较小,外包线特征值的安全裕度较大。
(1)下视边界。从直升机正下方与直升机距离为最小安全高度处开始,以下视延伸角向前延伸即得到HTAWS的下视边界。为确保安全,当直升机飞行航迹角小于一定值时,应对下视边界进行修正。此外,为了避免虚警,当直升机以较低高度飞越山脊时,下视边界需进行额外的边界剪裁[6]。经过边界修正和边界剪裁的下视边界即为最终的下视边界。
(2)前视边界。前视边界主要由前视告警距离确定,前视距离乘以相应的影响系数k即可得到前视告警距离。从直升机正前方与直升机距离为前视告警距离处开始,垂直方向上双向延伸即可得到HTAWS的前视边界。
(3)上视边界。当直升机遇到障碍地形时,垂直方向上的规避方式一般为拉起爬升,因此以拉起爬升过程中的高度损失来设计上视边界较为合理。从直升机正下方与直升机距离为拉起掉高处开始以上视延伸角向前延伸,延伸距离达到上视距离后改为垂直向上延伸,即得到HTAWS的上视边界。
(4)侧边界。直升机飞行过程中所处的位置具有一定的横向不确定性,因此告警包线应具有一定宽度。前方越远处直升机位置不确定性越大,因此远前方处告警包线的宽度也应该越大。为此,在起始宽度的基础上,以一定的偏斜角向前延伸即得到HTAWS的侧边界。
此外,直升机飞行中还存在高度误差、地形数据库分辨率及精度误差等诸多不确定因素,而这些不确定因素在最后着陆阶段很可能引起虚警。因此,在HTAWS前视告警算法中引入“剪裁高度”,以减少着陆阶段可能出现的虚警。
2直升机前视告警包线算法
2.1最小安全高度
最小安全高度ΔH是直升机下方的一段安全距离。直升机巡航飞行中可以参考直升机GPWS中模式4A的告警高度,将ΔH设为46 m(150 ft)[7]。在起飞或着陆阶段,直升机往往飞行高度很低,此时为减少虚警,ΔH值应相应减小,ΔH随直升机距最近跑道距离的变化而变化。
2.2前视距离
前视距离L是直升机前方的一段安全距离。参考飞机前视距离的设计方法,将直升机转弯改出过程中前进的距离作为前视距离。L由两部分组成,即直升机在飞行员反应时间内通过的水平距离和协调转弯改出时的转弯半径,表达式如下:
(1)
式中:V为直升机飞行速度;g为重力加速度;α为转弯坡度角;T为飞行员反应时间。
2.3下视边界
下视边界即告警包线的下边界,下视边界主要由地形ΔH和下视延伸角θ确定,2.1节已经详细给出了最小安全高度的确定方法。对于延伸角,可以在HTAWS系统中预设定一个角度值θ1,并与直升机当前飞行航迹角相比较,取两者中的较大值为下视延伸角度。如:警戒边界θ1可设为0°,警告边界θ1可设为6°。
当直升机下降飞行,且航迹角γ小于某一预设基准角δ时(如-4°),下视延伸角度须进行修正,修正角度表达式如下:

(2)
式中:K为影响系数,对于警戒边界典型值为0.5,警告边界典型值为0.25。
在进行边界剪裁时,系统预设定一个剪裁角度上限值θsx、一个角度基准值δ和一个高度补偿值h。剪裁角度可以表示为:
(3)
2.4前视边界
前视边界即告警包线的前方边界。前视边界主要由前视距离确定,其计算方法已经在2.2节进行了详细描述,将前视距离乘以相应的影响系数k即可得到警戒前视距离和警告前视距离。警戒边界k典型值为1,警告边界k典型值为0.5。
在确定前视距离之后,从直升机正前方与直升机距离为警戒前视距离处开始沿垂直方向双向延伸,即得到HTAWS的警戒前视边界;从直升机正前方与直升机距离为警告前视距离处开始沿垂直方向双向延伸,即得到HTAWS的警告前视边界。
2.5上视边界
上视边界即告警包线的上边界。上视边界主要由拉起掉高、上视延伸角和上视距离确定。拉起掉高可以表示为:
(4)
(5)

对于上视边界的延伸角度,首先在HTAWS系统中预设定一个角度值θ2,并与直升机当前飞行航迹角比较,取两者中的较大值为上视延伸角度。警戒边界和警告边界θ2典型值均为6°。
2.6侧边界
告警包线的侧边界由起始宽度、中心线偏斜角、侧边界偏离角共同确定[8]。HTAWS系统预先设定一个起始宽度(如典型值64 m(210 ft)),直升机左右两侧各一半;中心线偏斜角φ等于直升机当前的滚转角ρ;侧边界偏离角ψ是指侧边界偏离中心线的角度,该值也可由系统预先设定,如1°。
在起始宽度的基础上,以中心线偏斜角和侧边界偏离角向前延伸,即可得到HTAWS的侧边界。图4给出了告警侧边界延伸示意图。

图4 告警侧边界延伸示意图Fig.4 Lateral boundary of HTAWS
2.7剪裁高度
直升机存在高度误差、地形数据库分辨率及精度误差等诸多不确定因素,而这些不确定因素在最后着陆阶段很可能引起虚警。因此,在HTAWS前视告警算法中引入“剪裁高度”这一措施,以减少着陆阶段可能出现的虚警。剪裁高度包括相对于跑道的剪裁高度Hr和相对于飞行器的剪裁高度Ha[9],其表达式为:
式中:Hre为机场跑道海拔;Hs为预设定值,典型值为90 m(300 ft);Hae为直升机瞬时海拔高度;Hb为可调偏置量,典型值为6 m(20 ft)。
绝对剪裁高度(Hjc)可以表示为:
(6)
式中:d为直升机距最近跑道距离。图5为绝对剪裁高度示意图。

图5 绝对剪裁高度示意图Fig.5 Absolute cut-off altitude
当直升机海拔高度小于绝对剪裁高度时,告警系统将自动屏蔽所有地形而不进行任何告警。
3算例仿真
选取美国航电规范DO-309算例库中的算例进行飞行仿真[10],以验证上述前视告警算法的有效性。该算例中直升机飞行速度为250 km/h,飞行高度为2 621 m(8 600 ft)。基于本文所给出的直升机前视地形告警算法和算例中的事故场景进行飞行仿真。图6给出了飞行仿真结果。

图6 飞行仿真结果Fig.6 Flight simulation results
可以看出,在撞地前35 s,HTAWS给出了“警戒地形”的语音告警,在撞地前21 s,HTAWS给出了“警告地形”的语音告警,若此时飞行员及时采取改出操纵动作,完全可以避免与山峰相撞。仿真算法验证了本文前视地形告警算法的有效性。
4结束语
本文提出了一种适用于直升机的前视地形告警算法,并构建仿真算例对算法进行了仿真验证。仿真结果表明,该算法可以在直升机撞地前提供告警,飞行员根据告警信息进行改出机动从而避免飞行撞地。本算法不针对特定机型,在后续研究中可以考虑具体直升机性能参数对算法的影响,对告警算法进行优化,为研制前视地形告警设备提供算法支撑。
参考文献:
[1]杨超.地形感知和告警系统(TAWS)研究及仿真实现[D].上海:上海交通大学,2011.
[2]吴琛.地形提示和警告系统研究[J].民用飞机设计与研究,2012(1):32-34.
[3]Muller H R,Conner K J,Johnson S C.Terrain awareness system: 5839080[P].1998-11-17.
[4]Department of Transportation Federal Aviation Administration Aircraft Certification Service.TSO-C151b,terrain awareness and warning system[S] Washington D C:Aeronautical Radio Inc,2002.
[5]Yang L C,Kuchar J K.Performance metric alerting:a new design approach for complex alerting problems[J],IEEE Transactions on Systems,Man,and Cybernetics—Part A: System and Humans,2002,32(1):123-134.
[6]Ishihara Y,Bateman C D.System and methods for reducing nuisance alerts for helicopter enhanced ground proximity warning systems:7626514[P].2007-12-01.
[7]Paterson N,Wright S.Product specification for the MK XXII helicopter enhanced ground proximity warning system[Z].Redmond, Washington:Honeywell International Inc.,2002.
[8]Conner Kevin J,Johnson S C.Ground proximity warning system,method and computer program product for controllably altering the base width of an alert envelope:6484071 [P].2000-08-17.
[9]Ishihara Y,Johnson S C,Conner K J.EGPWS cutoff altitude for helicopters:6622066 [P].2003-09-16.
[10]RTCA.Minimum operation performance standards(MOPS) helicopter terrain awareness and warning system airborne equipment:DO-309[S].Washington D.C.:RTCA,Inc,2008.
(编辑:李怡)
Research on forward looking terrain alerting algorithm for helicopter
ZHOU Cheng-zhong, LU Yang
(National Key Laboratory of Rotorcraft Aeromechanics, NUAA, Nanjing 210016, China)
Abstract:To make the best use of helicopter terrain awareness and warning system(HTAWS) to reduce accidents of controlled flight into terrain, a kind of forward looking terrain alerting algorithm suitable for helicopter was introduced. Firstly, the basic operating principles of HTAWS forward looking terrain alerting was introduced, and then the determination method of the look-down boundary, look-ahead boundary, look-up boundary and lateral boundary were raised in detail. Finally, a simulation example was built to verify the effectiveness of the algorithm. Simulation results show that the algorithm can provide early warning for helicopter flying into terrain.
Key words:terrain awareness and warning system; controlled flight into terrain; forward looking terrain alerting
收稿日期:2015-09-08;
修订日期:2015-12-08; 网络出版时间:2016-02-29 16:38
作者简介:周成中(1991-),男,江苏滨海人,硕士研究生,研究方向为直升机飞行安全; 陆洋(1977-),男,江苏大丰人,副教授,博士,研究方向为直升机动力学与飞行控制。
中图分类号:V249.1; V275.1
文献标识码:A
文章编号:1002-0853(2016)03-0030-04
猜你喜欢
科学大众(2022年17期)2022-09-22 01:37:30
北京航空航天大学学报(2019年9期)2019-10-26 02:30:08
民用飞机设计与研究(2019年2期)2019-08-05 01:33:40
小哥白尼(军事科学)(2018年9期)2018-12-08 08:18:44
小哥白尼(军事科学)(2018年8期)2018-09-12 02:07:56
小学生优秀作文(高年级)(2018年4期)2018-09-11 01:23:30
中国军转民(2018年2期)2018-09-10 15:29:14
小哥白尼(军事科学)(2018年6期)2018-09-10 05:56:24
新闻传播(2018年10期)2018-08-16 02:10:08
小哥白尼(军事科学)(2018年1期)2018-05-25 02:24:52