基于TLE5012可编程磁编码器的设计
2016-07-01 01:40寇丽萍夏超英
电源学报 2016年1期
寇丽萍,夏超英
(天津大学电气与自动化工程学院,天津300072)
DOI:10.13234/j.issn.2095-2805.2016.1.27中图分类号:TM 615文献标志码:A
基于TLE5012可编程磁编码器的设计
寇丽萍,夏超英
(天津大学电气与自动化工程学院,天津300072)
为满足调速系统对编码器分辨率和输出信号的不同要求,设计制作了一个可编程磁编码器,通过软件编程可以改变编码器的分辨率,配置编码器输出ABZ脉冲或UVW脉冲。设计采用TLE5012测量转子位置,DSP根据TLE5012提供的位置信息输出编码脉冲。实验样机的测试结果证明了方案的可行性,并验证了可编程磁编码器的性能。
可编程;磁编码器;分辨率;TLE5012
引言
通过机械测量和转速估算技术[1,2]可获得电机转速,以形成调速系统的闭环控制,机械测量普遍采用编码器将速度、位置等机械量转换为数字脉冲或正弦信号[3]。编码器按输出脉冲形式分为增量式编码器、绝对式编码器和混合式编码器。其中,增量式编码器输出两路正交的AB脉冲,每周输出一个Z脉冲作为零位参考,适用于转速测量,在异步电机调速控制系统中得到了广泛的应用[4-5];绝对式编码器并行输出与转子位置对应的二进制码,适用于位置和转速测量,在永磁同步电机控制系统和伺服系统中有广泛的应用,但绝对式编码器占用接口引线多,成本高,对环境条件敏感;混合式编码器将绝对位置测量和增量式编码器的高分辨率结合在一起,占用的接口引线较少,成本适中,在输出ABZ增量式脉冲的同时输出三相互差120°电角度的UVW脉冲,适合应用于永磁同步电机控制系统[6-7]。目前混合式编码器多为光电编码器,精度高,抗扰能力强,但光栅的抗振性能差,寿命短[8]。磁编码器体积小,寿命长,抗振能力强,可工作在恶劣环境中,随着小型化、高可靠性需求的不断提出,磁编码器在家电、办公机械、伺服控制系统、工业机器人、甚至军事应用等领域的市场份额正在逐步扩大[9-10]。
磁编码器主要由永磁体、磁传感器和信号处理电路组成,永磁体随被测旋转轴同步旋转使磁传感器周围磁场发生变化,磁传感器输出反映磁场变化的信号给信号处理电路,信号处理电路根据该信号输出编码脉冲[11]。磁传感器主要基于霍尔效应、各向异性磁阻效应AMR(anisotropic magneto resis tive)或巨磁阻效应GMR(giant magneto resistive)检测磁场。其中,GMR材料的电阻率对外界磁场的变化最为敏感,克服了霍尔元件长期高温下工作的不稳定性和AMR材料固有的巴克豪森噪声,基于GMR原理的磁编码器测量范围宽、稳定性高,成为发展的新方向[12]。
1 可编程磁编码器的硬件设计
1.1TLE5012简介
TLE5012是一款基于GMR原理的角度传感器芯片,使用图1所示的惠斯通全桥电路在360°范围内测量与芯片封装表面平行的磁场方向θ,全桥电路可以放大信号,消除温度的影响。两个惠斯通桥的输出电压Vx、Vy分别代表θ的余弦值和正弦值,芯片内部处理电路根据Vx、Vy计算θ,把θ转化为15位数字量存储在角度值寄存器AVAL(angle value register)中,角度值数字量与θ呈分段线性关系:AVAL的值处于0~0x3FFF时,θ介于0~179.99°;AVAL的值处于0x7FFF~0x4000时,θ介于0.01°~-180°[13]。
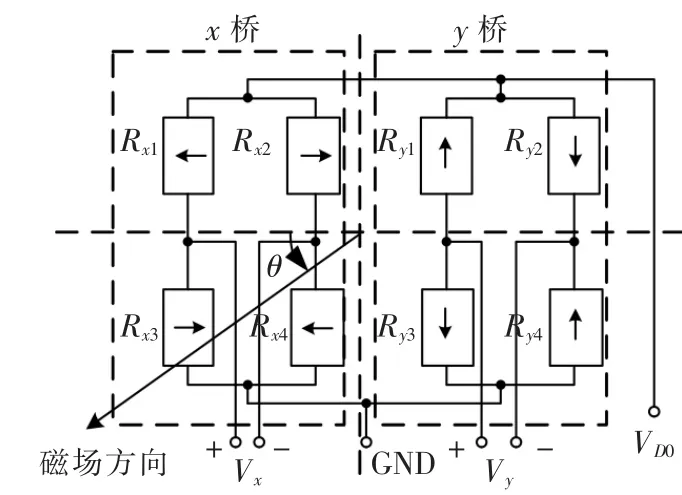
图1 惠斯通桥电路Fig.1 Wheatstone bridge
磁场位置可通过不同通信协议输出,TLE5012含同步串行通信SSC(synchronous serial communication)、脉冲宽度调制PWM(pulse-width modulation)、增量式接口IIF(incremental interface)、霍尔开关模式HSM(Hall-switch mode)等通信接口,其中SSC与串行外设接口SPI(serial peripheral interface)兼容,采用半双工数据传输方式,波特率高达8 Mbit/s,适合板上高速通信[14]。通过SSC可以对TLE5012的寄存器进行读写操作,DSP读AVAL寄存器操作,地址偏移量为02H结果如表1所示。数据传输按命令字、数据字、安全字的顺序进行,命令字包含读写标志位、待操作寄存器地址等信息,数据字包含真正的数据信息,安全字包含通信状态和校验等信息。
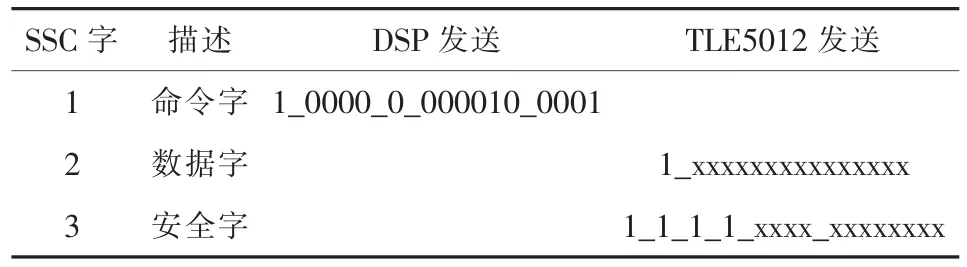
表1 DSP通过SSC读取AVAL寄存器Tab.1 DSP read AVAL register through SSC
1.2供电电源设计
采用3.3 V稳压管TPS7333为系统提供工作电压,供电电路如图2所示。将SENSE引脚与输出引脚接在一起使芯片工作在稳压模式[15],TPS7333 的RESET引脚与DSP的复位引脚相连,当电压不足时,为DSP提供复位信号。
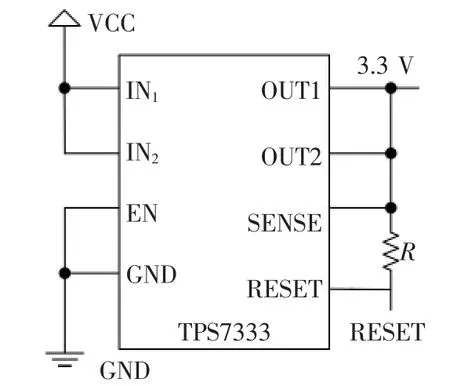
图2 供电电路Fig.2 Power supply circuit
1.3通信接口设计
参考TLE5012数据手册给出的典型应用电路,DSP与TLE5012的接口电路如图3所示。使用SSC与DSP的SPI接口通信,DSP工作在主动模式下,SPICLK与SCK相连,为通信提供时钟信号,通用IO口与CSQ相连,控制SSC的数据传输,SPISIMO和SPISOMI同时与DATA相连,实现数据双向传输。
美国的Fujimoto率先采用了柔性铰链来实现行走式压电驱动器。如图4所示[5],该驱动机构为一体化加工成型,避免过多的接触面和装配误差,具有很高的实用性。美国的Zhang B等人同样研制了一种一体化结构的压电驱动器,运行时输出力可以达到200 N,运动速度为6 mm/s[6]。
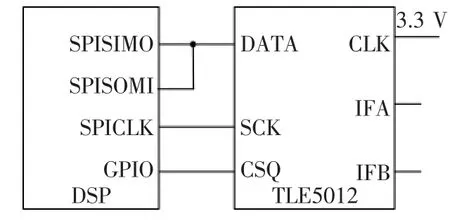
图3 TLE5012和DSP通信接口Fig.3 Communication interface between TLE5012 and DSP
2 可编程磁编码器的软件设计
编码器每周输出的UVW脉冲数等于电机极对数,输出的AB脉冲数等于分辨率,以电机每转一周编码器输出10个UVW脉冲和8 192个AB脉冲为例对软件设计进行详细分析。按照该方法,可以根据需要对编码器分辨率和输出信号形式进行任意配置。软件整体设计思路为:在周期为T0的定时中断0中获取位置信息并处理,用M法测定电机转速,进一步计算T0时间内期望输出的脉冲沿数p1;根据T0和p1配置快速中断1的周期T1,在中断1中改变IO口电平依次输出脉冲沿。为保证零延时输出脉冲沿,中断1具有最高优先级,中断0可随时被中断1打断。
上电后首先执行主函数对系统进行配置,保证后续程序的正常运行,主程序流程如图4所示。
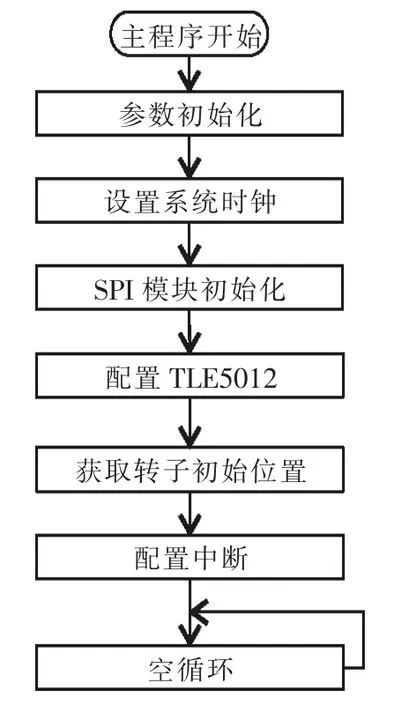
图4 主程序流程Fig.4 Flow chart of main program
2.1通信的实现
DSP通过读AVAL寄存器获取位置信息,软件流程如图5所示。
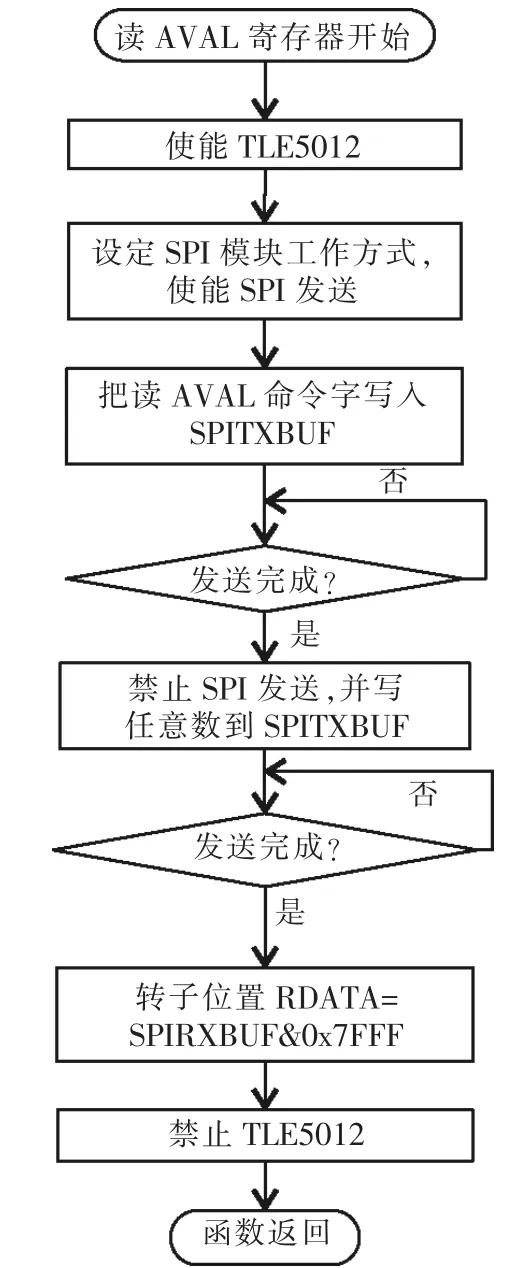
图5 DSP读数据流程Fig.5 Flow chart of data reading
作为数据传输中的主设备,DSP为通信提供时钟信号,因此在命令字发送完毕,禁止SPI发送功能后,需要写SPITXBUF寄存器来启动时钟,保证TLE5012可以发送数据。AVAL寄存器最高位是状态标志位,和0x7FFF按位与获得真正的位置信息。
2.2位置信息的处理
中断0的流程如图6所示。首先调用读AVAL寄存器函数获取位置RDATA,根据AVAL定义,需要将RDATA左移一位变为补码后才能通过做差得到角度值增量D_ANG;M法测速得到电机转速n=,每个AB脉冲周期含4个脉冲沿,所以T0时间内期望输出的脉冲沿数p1为
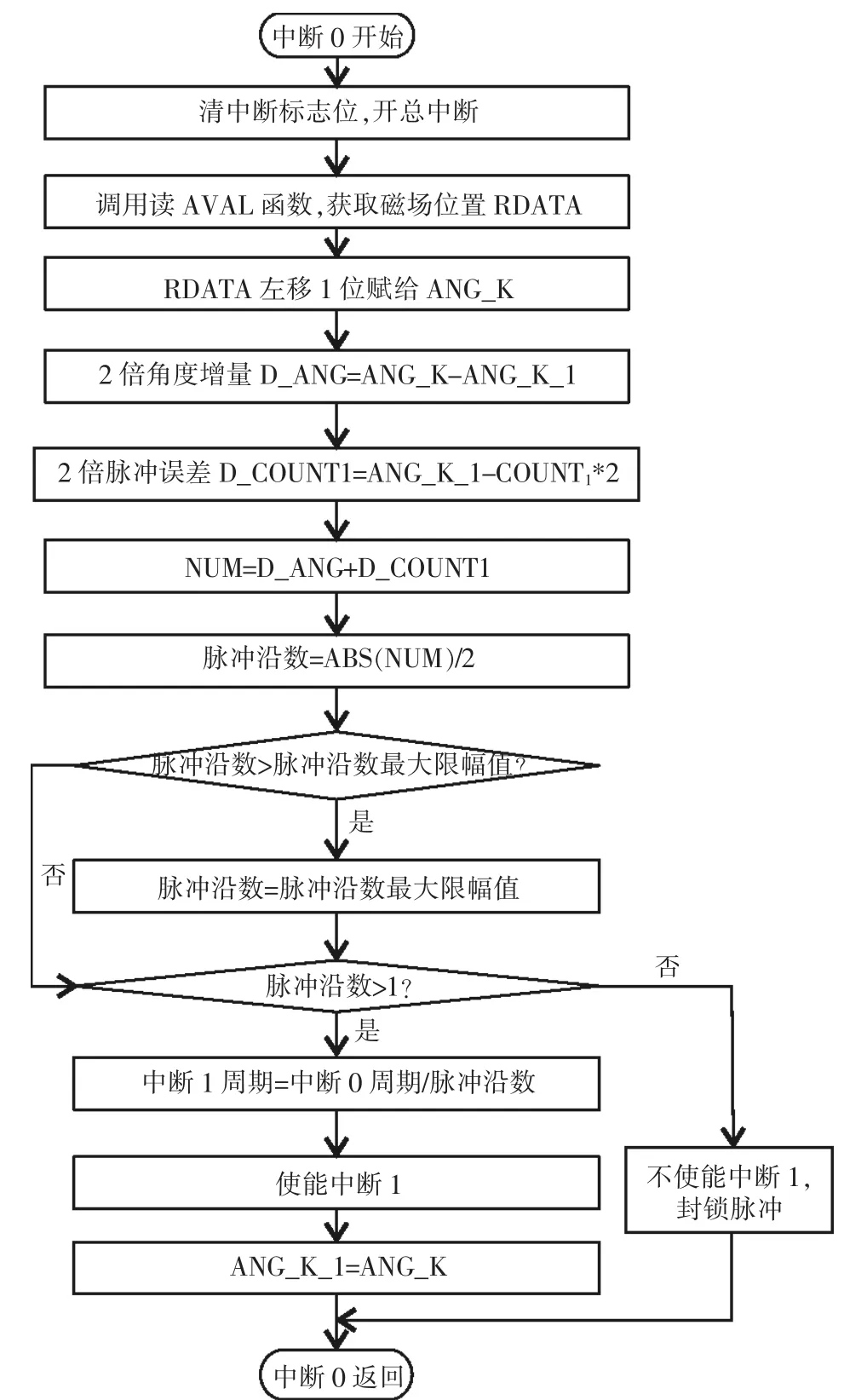
图6 中断0流程Fig.6 Flow chart of interrupt 0

中断1的周期T1为

若式(2)不能整除,会给输出的脉冲沿数带来误差,该误差随时间累积将严重影响编码器性能,因此,必须对脉冲沿数进行校正,用校正后的脉冲沿数p2代替式(2)中p1计算中断1的周期。脉冲沿数校正公式为

式中:(ANG_K_1)/2为上次中断0中获取的转子实际位置;COUNT1为记录已输出的脉冲沿信息的变量,系统上电时初始化为转子实际位置,每次执行中断1根据电机旋转方向自增1或自减1。在TLE5012的分辨率为15位和编码器分辨率为8192的前提下,(ANG_K_1)/2-COUNT1等于当前输出的脉冲沿数误差。
程序中需对p2上下限幅。若不上限幅,p2较大时会导致中断1周期过短,中断程序在T1时间内执行不完,DSP不能及时响应中断1按时输出脉冲;若不下限幅,编码器在电机静止时受测量误差带来的AVAL寄存器第0位跳变的影响仍会输出脉冲。对p2最大值限幅限制了编码器能测量的最大转速,但对p2最小值限幅并不影响编码器能测量的最小转速,因为程序对连续多个不输出脉冲T0时间内角度变化累积,当累积值超过下限幅时正常输出脉冲。
由以上分析可知,编码器输出脉冲以及对误差的校正都有T0时间的滞后,T0越小,编码器越能实时反映电机转速,及时校正误差,但中断0服务程序耗时较长,加之电机转速是机械量,不会频繁突变[16],T0取值1~10 ms较为合理。
2.3编码脉冲的输出
输出分辨率为8 192的ABZ编码脉冲中断1的流程如图7所示。AB脉冲的输出电平由COUNT1的低两位TEMP_AB决定,根据电机旋转方向,TEMP_AB由0逐一增大到3或由3逐一减小到0,程序判断TEMP_AB的值输出相应的AB脉冲。Z脉冲宽度可以根据需要调节,按图7流程,角度为0时输出4个脉冲沿宽的Z脉冲。
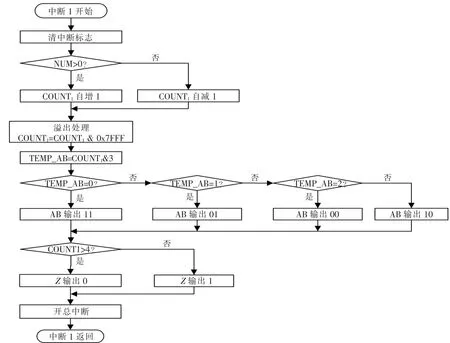
图7 输出ABZ脉冲时中断1流程Fig.7 Flow chart of interrupt1 when outputting pulse in ABZ
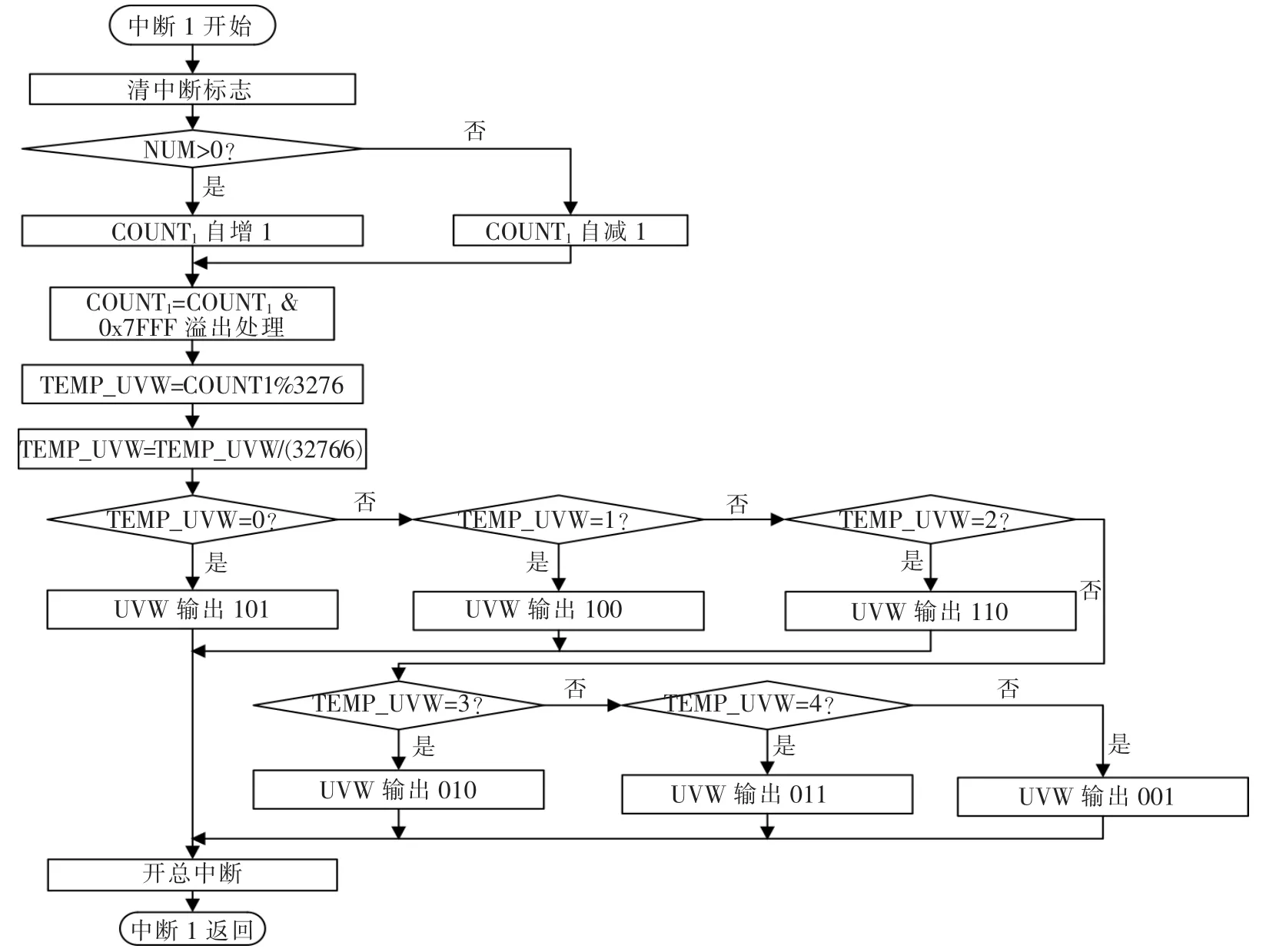
图8 输出UVW脉冲时中断1流程Fig.8 Flow chart of interrupt 1 when outputting pulse in UVW
输出UVW脉冲的程序流程如图8所示,。电机每转一周输出10个UVW脉冲,所以COUNT1每计3 276个数编码器完成一个周期的UVW脉冲的输出,使用变量TEMP_UVW代表一个脉冲周期内UVW的6个状态,根据电机旋转方向TEMP_UVW 由0逐一增大到5或由5逐一减小到0,程序判断TEMP_UVW的值输出相应脉冲。
3 实验结果与分析
设计并制作的可编程磁编码器的实物如图9所示。为方便安装固定,沿边缘开3个孔槽。
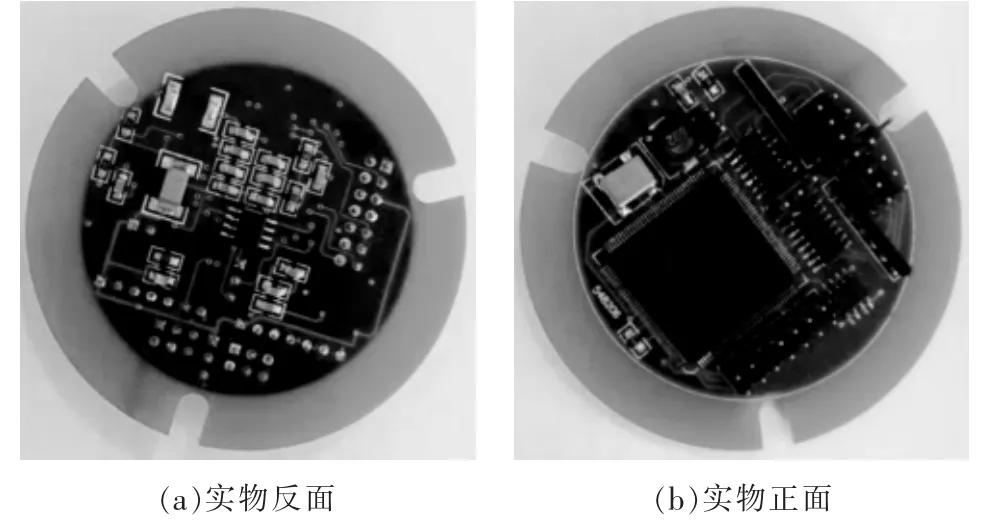
图9 编码器实物Fig.9 Picture of proposed encoder
使用示波器观察可编程编码器输出脉冲如图10、图11所示。图10是分辨率为8 192的编码器在不同转速下输出的ABZ信号,图(a)中,A相超前B相90°,脉冲的频率为9.515 kHz,由频率计算的转速大小为69.69 r/min;图(b)与图(a)相比,脉冲频率基本不变,相位关系由A相超前B相90°变为B相超前A相90°;图(c)与图(a)相比,A、B相位关系不变,只是脉冲频率降为5.49 kHz,由频率计算的转速为40.2 r/min;图(d)中Z脉冲频率为1.16 Hz,由频率计算的电机转速为69.6 r/min。可以看出AB相脉冲正交度较好,由脉冲频率计算得出的电机转速几乎与实际转速相等。
图11为电机转速是70 r/min时编码器输出的UVW脉冲,三相脉冲互差120°,不同状态对应不同电角度区间,可用于转子初始定位。
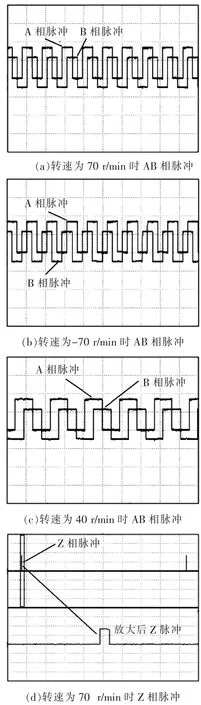
图10 分辨率为8 192的编码器输出的ABZ脉冲信号Fig.10 ABZ pluses output by encoder with resolution of 8 192
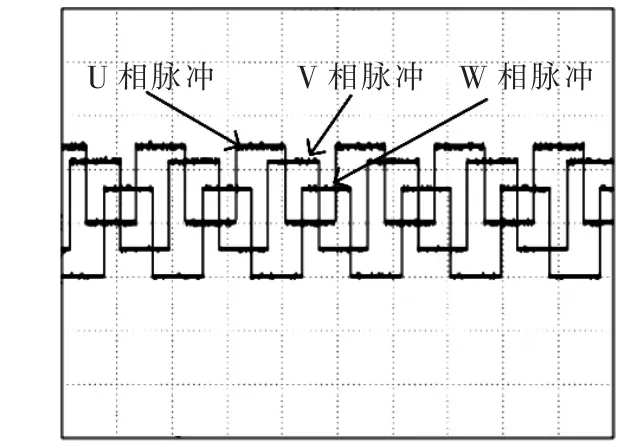
图11 编码器输出的UVW相脉冲Fig.11 UVW pluses output by encoder
4 结语
本文给出了一种可编程磁编码器的设计方案,并对样机进行实验验证。按照本文方法,可以在不改变硬件的前提下,通过软件实现对编码器分辨率和输出脉冲形式的任意配置,从而满足调速系统的不同要求。编码器使用基于GMR原理的TLE5012芯片检测位置,具有较高可靠性,可应用于恶劣环境中。配置为增量式编码器时输出的ABZ脉冲分辨率最高达8 192,并可以任意改变Z脉冲位置和宽度,配置为混合式编码器时可以根据电机极对数输出正确的UVW脉冲,用于转子位置的初始定位。此外,所制作可编程编码器的成本较低,具有较高的应用价值。
[1]陈改霞,李宏.无速度传感器异步电机的速度辨识方案[J].电源学报,2013,11(4):65-70.Chen Gaixia,Li Hong.Speed identification scheme of speed sensorless induction motor[J].Journal of Power Supply,2013,11(4):65-70(in Chinese).
[2]黄哲,惠浩浩,韩龙飞,等.基于单元串联的无速度传感器矢量控制算法研究[J].电源学报,2014,12(1):66-73.Huang Zhe,Hui Haohao,Han Longfei,et al.Study of speed sensorless vector control algorithm in cell-cascaded inverter[J].Journal of Power Supply,2014,12(1):66-73 (in Chinese).
[3]洪小圆,王鹿军,吕征宇,等.一种新颖的正弦正交编码器细分方法[J].电源学报,2011,9(1):7-11,37.Hong Xiaoyuan,Wang Lujun,Lyu Zhengyu,et al.A novel scaling method for sinusoidal quadrature encoder[J].Journal of Power Supply,2011,9(1):7-11,37(in Chinese).
[4]杜颖财,王希军,王树洁,等.增量式编码器自动检测系统[J].电子测量与仪器学报,2013,26(11):993-998.Du Yingcai,Wang Xijun,Wang Shujie,et al.Auto-detection system of incremental encoder[J].Journal of Electronic Measurement and Instrument,2013,26(11):993-998(in Chinese).
[5]Hua Yang,Gao Jianhua,Wen Xuhui.The Application of Magnetic Encoders in Induction Motor Vector Control[C].Sixth International Conference on Electrical Machines and Systems.IEEE,2003,2:544-547.
[6]Chen Daxing,Sun Peide,Wei Jiang.Initial rotor position detection of PMSM without detecting the UVW′s position [C].2011 International Conference on Electrical and Control Engineering.IEEE,2011:692-695.
[7]张允志,张兴华,丁守刚.基于TMS320F2801的PMSM矢量控制的数字实现[J].电力电子技术,2011,45(3):70-72.Zhang Yunzhi,Zhang Xinghua,Ding Shougang.Digital implementation of PMSM vector control system based on TMS320F2801[J].Power Electronics,2011,45(3):70-72 (in Chinese).
[8]吴忠,吕绪明.基于磁编码器的伺服电机速度及位置观测器设计[J].中国电机工程学报,2011,31(9):82-87.Wu Zhong,Lv Xvming.Design of angular velocity and position observer for servo motors with magnetic encoders[J].Proceedings of the Society for Electrical Engineering,2011,31(9):82-87(in Chinese).
[9]黄刚,唐敏.磁性编码器的市场和技术动向[J].传感器世界,1998(3):8-10.Huang Gang,Tang Min.Market and technology trends of magnetic eencoder[J].Sensor World,1998(3):8-10(in Chinese).
[10]吕德刚,李铁才,杨贵杰.高性能磁编码器设计[J].仪器仪表学报,2006,S2:1347-1350.Lv Degang,Li Tiecai,Yang Gaojie.High performance magnet encoder design[J].Chinese Journal of Scientific Instrument,2006,S2:1347-1350(in Chinese).
[11]莫会成,闵琳.现代高性能永磁交流伺服系统综述-传感装置与技术篇[J].电工技术学报,2015,30(6):10-21.Mo Huicheng,Min Lin.Summary of modern high performance permanent magnet AC servo system-sensor device and technology[J].Transactions of China Electrotechnical Society,2015,30(6):10-21(in Chinese).
[12]顾国锋.基于GMR增量式磁旋转编码器的技术研究[D].杭州:杭州电子科技大学,2012.Gu Guofeng.The Technical Research of Incremental of Rotary Encoder Based on Giant Magneto-resistance[D].Hangzhou:Hangzhou Dianzi University,2012(in Chinese).
[13]Infineon.TLE5012 GMR-based angular sensor for rotor position sensing[R].Infineon,2010.
[14]何喜富.基于iGMR原理角度传感器TLE5012B应用指南[J].单片机与嵌入式系统应用,2015(3):74-77.HeXifu.Application guide for TLE5012B based on iGMR [J].Microcontrollers&Embeded Systems,2015(3):74-77(in Chinese).
[15]TPS7301Q,TPS7325Q,TPS7330Q,TPS7333Q,TPS7348Q,TPS7350Q Low-dropout voltage regulators with integrated delayed reset function[R].TI,1999.
[16]陈伯时.电力拖动自动控制系统[M].3版.北京:机械工业出版社,2003.
Design of Programmable Magnetic Encoder Based on TLE5012
KOU Liping,XIA Chaoying
(School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
A programmable magnetic encoder is developed to satisfy different requirements for encoder resolution and output signals in different systems.By programming,the proposed encoder can be configured to output pulses in ABZ or UVW with different resolution.The proposed encoder uses TLE5012 to measure the rotor position and DSP to output pulses according to the information provided by TLE5012.Test results on experimental prototype prove feasibility of the scheme and verify the performance of the programmable encoder.
programmable;magnetic encoder;resolution;TLE5012

寇丽萍
2015-05-07
寇丽萍(1991-),女,硕士研究生,研究方向:电机控制,E-mail:kouliping0615@sina.cn。
夏超英(1958-),男,通信作者,教授,博士生导师,研究方向:控制理论与应用、自适应控制理论、电力电子装置及系统、电动汽车、混合动力汽车电机及控制系统等,E-mail:xiachaoying@126.com。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
有色金属设计(2022年4期)2022-02-04
计算机应用(2020年5期)2020-06-07
通信技术(2018年11期)2018-11-07
智能计算机与应用(2018年6期)2018-10-31
电子技术与软件工程(2018年1期)2018-03-22
制造技术与机床(2017年7期)2018-01-19
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
西安工程大学学报(2016年6期)2017-01-15