数字化高频地波雷达海态信息提取试验研究
2016-07-01 08:46王曙曜施春荣陆小虎陈天富
雷达与对抗 2016年2期
王曙曜,施春荣,陆小虎,周 涛,陈天富
(1.中船重工鹏力(南京)大气海洋信息系统有限公司,南京211100;2.南京鹏力系统工程研究所,南京211100)
数字化高频地波雷达海态信息提取试验研究
王曙曜1,施春荣2,陆小虎1,周涛1,陈天富1
(1.中船重工鹏力(南京)大气海洋信息系统有限公司,南京211100;2.南京鹏力系统工程研究所,南京211100)
摘要:利用数字化高频地波雷达系统,通过对盐城滨海海域的雷达回波数据进行分析,并将得到的海态结果与浮标实测的数据进行了比对,结果表明数字化高频地波雷达系统可以高精度地提取海流信息,同时也可以有效地提取高海况下的风速风向和浪高信息。
关键词:数字化高频地波雷达;径向流速;有效浪高;风速;风向
0引言
高频地波雷达对海洋状态进行监测已经有几十年的发展历史。利用高频电磁波与海面波浪的相互作用产生散射的机理,通过数字波束形成、空间谱估计等相关算法处理可以从雷达回波谱提取海况参数(如风、浪、流等),实现海况信息的实时获取。高频地波雷达具有大面积、全天候对海况进行监测能力,且不受天气和地理条件的限制,经济可靠,探测精度较高,因而逐渐受到各个国家的重视[1]。
目前,国内外高频地波雷达普遍采用了数字和模拟相结合的体制,其模拟电路会带来大量的噪声及附加干扰,同时会存在各个通道幅相不一致的问题,极大地影响了海态信息提取精度。数字化高频地波雷达最大程度地采用了数字化和软件无线电技术,从根本上避免了以上问题的存在,无论是可靠性方面还是探测性能方面都要优于数模体制雷达。
本文利用全数字化高频地波雷达系统典型代表产品OS081H高频地波雷达在盐城滨海基地进行了海态观察试验,并对雷达反演数据和浮标数据进行了比对。结果表明,数字化高频地波雷达系统可以高精度地提取海流信息,同时也可以有效地提取高海况下的风速风向和浪高信息。
1地波雷达提取海态基本原理
1.1径向流速和方位信息的提取
宽波束雷达天线阵列的每一根天线接收的信号方向都来自宽阔的海面,而不同方向上的径向流速一般不同,窄波束情形下雷达回波的一阶谱线在这里被展宽成了有一定宽度的一阶谱区。谱区中的每一个谱点(对应于一个径向海流速度值)都对应某一个方向上一阶回波的贡献,找到了谱点和方向的对应关系就等同于求出了海流的方位分布。径向流速值可以从所选谱点与对应Bragg圆频率的偏移直接得到,径向流的方位则可通过上述的MUSIC算法估计出来,也可以利用MVM波束扫描得到。
1.2浪高参数反演方法——Barrick法
浪高反演算法采用Barrick提出的浪高反演经验模型[2],其求解公式为
(1)
其中w(η)是为了消除耦合系数而引入的一个权函数,它只依赖于多普勒谱频率,而与雷达频率、雷达波束和风向的夹角、浪高及其他参数无关,且对于0.5≤η≤1.5时可视为常数,η=ωD/ωB为归一化多普勒谱频率。根据式(1)求解浪高时不必对整个多普勒谱积分,而只需对多普勒谱强度较大的一边(-∞<ωD<0,or0<ωD<+∞)积分即可。
1.3风速和风向信息提取
风速反演采用了风速与二阶谱和一阶谱能量比值经验关系式[3]:
(2)
其中,a,b为待定拟合系数,R为二阶谱能量与一阶谱能量的比值。
风向反演采用Heron和Rose提出的多波束采样确定风向的方法[4],风向与正负一阶峰强度比值定量关系为
(3)

2试验概述
试验场地为江苏海洋气象综合观察研究基地。试验设备为OS081H高频地波雷达和大浮标。OS081H高频地波雷达系统主要由发射天线、接收天线、发射分机以及接收分机组成,主要指标见表1。图1和图2分别给出了雷达多普勒回波和雷达站位置及浮标布设位置。
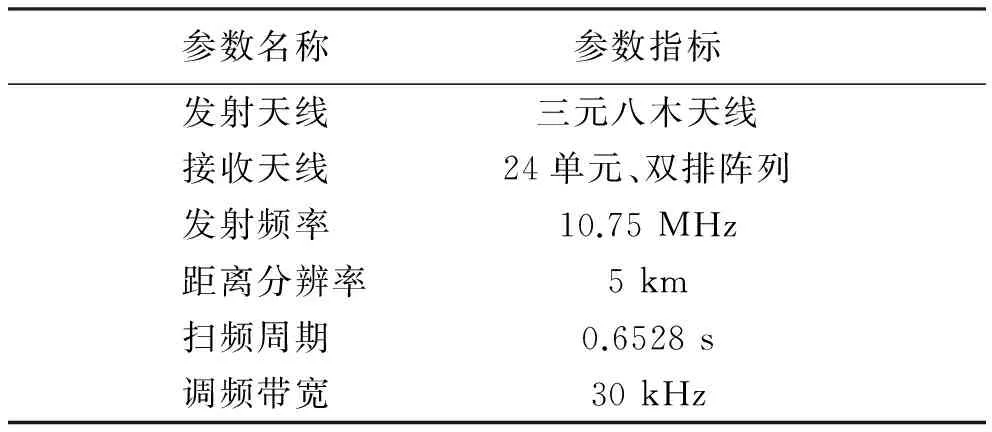
表1 滨海基地OS081H地波雷达参数指标

图1 OS081H高频地波雷达多普勒频谱图
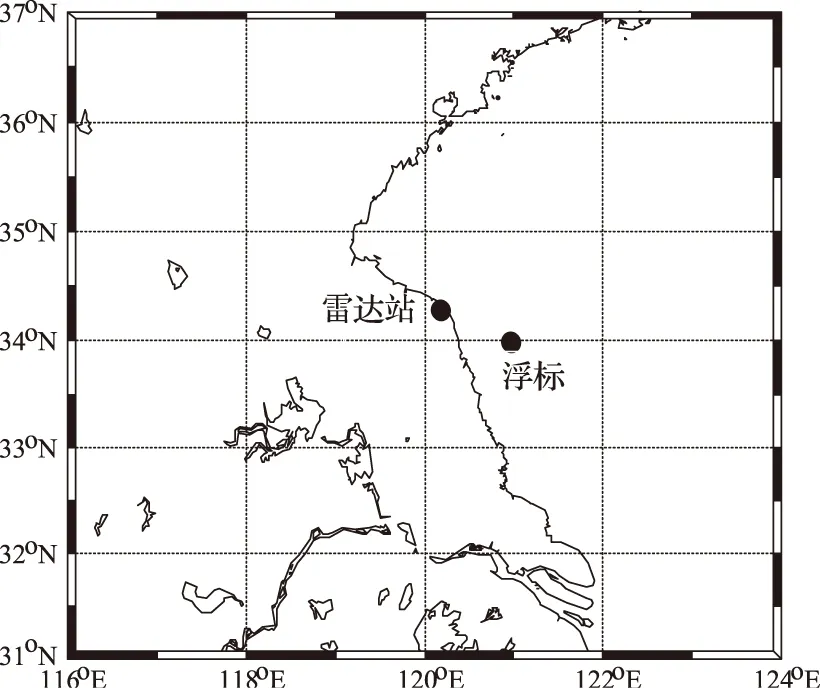
图2 雷达站位置和浮标布设位置
3试验结果分析
本文选取了2015.5.1~2015.5.31时间段的数据进行了分析。雷达结果时间分辨率为10 min,浮标实测结果时间分辨率为1 h,故将雷达1 h所测6场结果进行平均处理,以便与浮标结果时间相对应。同时,雷达反演流速为径向流速,需要通过公式将浮标矢量流转化为该点所在雷达波束上的径向流,vr代表了雷达径向流速,vc代表浮标矢量流速,αc代表浮标所测海流流向,βr代表该点所在波束方向。
(4)
图3和图4给出了雷达流速和浮标流速的时间比对图和散点图,二者的平均误差约5 cm/s,相关系数约0.91。该结果表明雷达海流结果与浮标实测结果具有良好的一致性。误差来源主要有3个方面:
(1) OS081H系统是假定浮标海域位置满足深水条件,即
h>2*lamda
其中,h为水深,lamda为雷达电波波长。雷达电波波长为27.9 m,即要求水深大于55.8 m。此处位置的水深无法获取相应的数据。若该位置水深不满足深水条件,无法对该位置点的海流进行修正,这会带来一定的误差。
(2) 地波雷达海流结果代表地波雷达面元海域的海流平均值,而浮标实测海流仅代表该位置点的海流值。若将二者的海流结果减去各自的平均值,则平均误差降低到3.5 cm/s。
(3) 海流算法本身的精度会带有相应的误差,包括一阶谱有效频点的选取过程中会误将目标点当作海流频点。求海流频点方位时信号源数判断错误,在海流插值过程中也会不可避免地带来一定误差。
另外,雷达系统误差和多普勒频率分辨率精度等也会带来相应的误差。对于这些误差来源对海流精度的影响,后续会作更详细的研究。
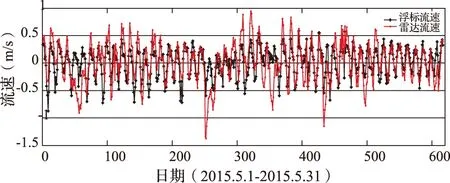
图3 雷达流速和浮标流速时间序列比对
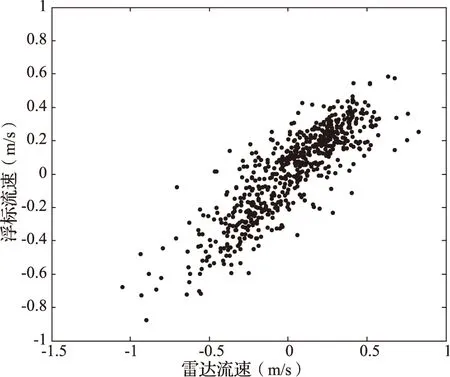
图4 雷达流速和浮标流速散点图
图5代表了地波雷达风向与浮标实测风向的比对。

图5 雷达风向与浮标风向时间序列比对
二者的变化趋势比较吻合,平均误差约21°,相关系数0.81。误差来源主要有以下两个方面:

图6 雷达风向与浮标风向时间序列比对
(2) OS081H系统风向反演算法为消除风向模糊,假定一定海域的风向是一致的或变化趋势相对缓慢,在某些时间点,风向并没有一定的空间相关性。这会导致一定的误差。
图7、图8分别代表了雷达风速、浪高与浮标实测结果的比对,浪高平均误差为0.52,相关系数为0.80,风速的平均误差为1.5 m/s,相关系数为0.78 m。由于浪高风速反演依赖于二阶回波谱,同时雷达发射频率较低,故二阶谱对低海况并不敏感,从而导致在低海况时浪高与风速的反演误差会相对较高。图9代表排除掉风速小于5 m/s的数据点后雷达风速与浮标风速的比对,风速的平均误差减小到1.0 m/s,相关系数提高到0.82。图10代表排除掉小于波高0.5 m的数据点后雷达波高与浮标波高的时间比对,浪高的平均误差减小到0.31 m,相关系数提高到0.88。

图7 雷达风速与浮标风速时间序列的比对
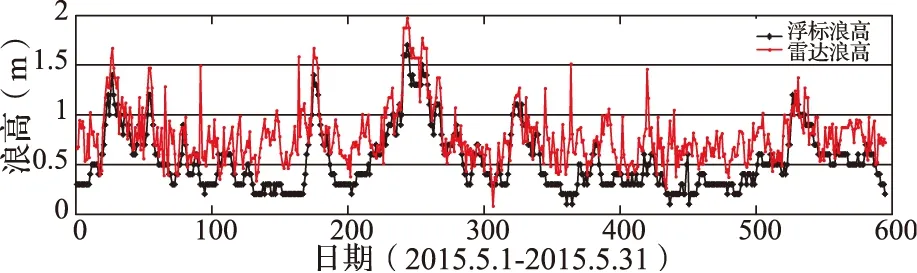
图8 雷达浪高与浮标浪高时间序列比对
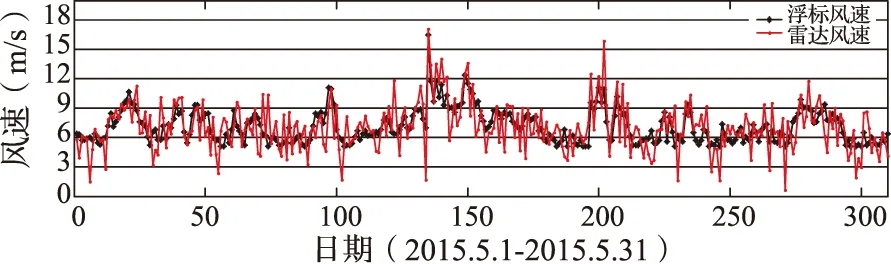
图9 雷达风速与浮标风速时间序列比对(风速>5 m/s的数据点)

图10 雷达浪高与浮标浪高时间序列比对(浪高>0.5的数据点)
4结束语
本文利用OS081H高频地波雷达在滨海海域获取的试验数据,通过相关算法处理获得了径向流速、风速、风向和浪高,并和浮标数据作了比对分析。通过分析,得到了海流的平均误差为5 cm/s,排除掉较低海况的数据点,风向的平均误差为15°,风速的平均误差为1 m/s,浪高的平均误差为0.31 m。该结果表明了数字化地波雷达系统可以高精度地提取海流信息,同时也可以有效提高高海况下的风向、风速和浪高信息。另外,通过进一步的大量海态试验,进而通过数据比测修正和校正算法,该系统的测量精度会得到进一步的提高。
参考文献:
[1]Wyatt L R,High frequency radar application in coastal monitoring planning and engineering[J].Australian Journal of Civil Engineering,2014,12(1):1-15.
[2]Barrick D E.Extraction of wave parameters from measured HF radar sea-echo Doppler spectra[J].Radio Science,1977,12(3): 415-424.
[3]楚晓亮,张杰,高频地波雷达风速直接反演的经验模型[J].电子与信息学报,2015,37(4):1013-1016.
[4]Heron M L,Rose R J.On the application of HF ocean radar to the observation of temporal and spatial changes in wind direction[J].IEEE Journal of Oceanic Engineering,1986,11(2):210-218.
Sea-state information extraction and test of digital HF ground-wave radar
WANG Shu-yao1, SHI Chun-rong2, LU Xiao-hu1, ZHOU Tao1, CHEN Tian-fu1
(1. PRIDE (Nanjing) Atmospheric and Oceanic Information System Co., Ltd. of CSIC,Nanjing 211100;2.Research Institute of Nanjing PRIDE Systems Engineering, Nanjing 211100)
Abstract:Based on the digital HF ground-wave radar system, with the analysis of radar echo data of Binhai waters in Yancheng, the sea-state results and the actual buoy data are compared. The results indicate that the digital HF ground-wave radar system can effectively extract the high-precision ocean current, the wind speed, the wind direction, and the wave height.
Keywords:digital HF ground-wave radar; radial current velocity; effective wave height; wind speed; wind direction
收稿日期:2016-03-20
作者简介:王曙曜(1988-),男,硕士,工程师,研究方向:高频地波雷达海态反演研究;施春荣(1978-),男,高级工程师,研究方向:雷达总体设计;陆小虎(1985-),男,硕士,研究方向:雷达信号处理;周涛(1968-),男,研究员,研究方向:雷达总体设计;陈天富(1988-),男,硕士,工程师,研究方向:雷达信号处理。
中图分类号:TN958
文献标志码:A
文章编号:1009-0401(2016)02-0005-04
项目支持:国家国际科技合作专项项目-小型化地波超视距雷达综合监测系统的联合研发(项目号:2012DFR10050);国家高技术研究发展计划(863计划)-浮标式高频地波雷达系统研制(项目号:2012AA091702);)
猜你喜欢
农业灾害研究(2022年9期)2022-11-19
铁道建筑(2021年10期)2021-11-08
气象与环境科学(2021年4期)2021-08-27
科技视界(2020年34期)2020-12-09
少年文艺·我爱写作文(2019年8期)2019-09-12
科学与财富(2019年16期)2019-01-04
中国诗歌(2018年6期)2018-11-14
现代农业科技(2018年11期)2018-08-14
中学生数理化·八年级数学人教版(2016年4期)2016-08-23
风能(2016年11期)2016-03-04