优化生存时间的无线传感器网数据融合
2016-06-28 13:19:40董齐芬陈红玉李国军王亢洪榛
电信科学 2016年6期
董齐芬,陈红玉,李国军,王亢,洪榛
(1.浙江警察学院计算机与信息技术系,浙江 杭州 310053;2.铁道警察学院公安技术系,河南 郑州 450053;3.浙江理工大学机械与自动控制学院,浙江 杭州 310018)
优化生存时间的无线传感器网数据融合
董齐芬1,陈红玉2,李国军1,王亢1,洪榛3
(1.浙江警察学院计算机与信息技术系,浙江 杭州 310053;2.铁道警察学院公安技术系,河南 郑州 450053;3.浙江理工大学机械与自动控制学院,浙江 杭州 310018)
以 WSN 中的目标跟踪为应用背景,研究基于扩展卡尔曼滤波法的优化生存时间数据融合问题,设计了一种兼顾跟踪准确度和节点能量的算法来实时地调度参与融合处理的节点组。 仿真结果表明,当目标的移动速度在一定范围内时,提出的算法能使跟踪结果不偏移目标的运动轨迹。 另外,与 Random 方法和 All方法相比,提出的算法大大延长了 WSN 的生存时间。
无线传感器网络;优化生存时间;数据融合;卡尔曼滤波
1 引言
无 线 传 感 器 网 络 (wireless sensor network,WSN)是 一种综合信息采集、处理和传输等功能于一体的新型网络信息系统,具有广泛的应用领域。然而,WSN 节点的能量、通信距离和带宽等资源受限的本质特性使得其应用受到一定制约。因此,如何节约节点能量、提高通信效率一直是WSN 研究中的主要问题。
近年来,国内外学者纷纷将形成于 20 世纪 80 年代的多 传 感 器 数 据 融 合 技 术[1]引 入 资 源 受 限 的 WSN 中 ,旨 在 一定程度上消除节点本身或相邻节点感知到的数据在时空上存在的相关性和冗余性,来降低数据量,以达到节约通信能耗的目的。其中,如何将卡尔曼滤波有效应用到WSN 数 据 融 合 中 是 研 究 热 点 之 一 。陈 军 勇 等[2]考 虑 将 传感器数据经过量化处理,提出迭代量化卡尔曼滤波器,并 证明 其 稳 定 性 。参 考 文 献[3,4]专 门 针 对无 线 传 感器 网络中的定位跟踪问题,研究基于卡尔曼滤波的数据融合算 法 。参 考 文 献[5]还研究将卡尔曼滤 波 器 与贝叶 斯 估 计结合起来,应用于 WSN 数据融合中。以上研究均在基于卡尔曼滤波的 WSN 数据融合的某个方面取得了一定成果。但它们默认每个节点均将感知信息发送到融合节点。然而,WSN 节点部署密集,节点感知的信息冗余度很大,可选择部分节点的感知数据用于卡尔曼滤波融合,以在保证融合质量的前提下,达到减少通信量和降低计算复杂度的 目 的 。Mo Y 和 Yang C 等 人[6-9]已 经 对 此 作 了 系 列 研究,为如何选择参与融合的 WSN 节点提供有效参考。但这些研究不是面向具体应用的。事实上,从实际应用中可以进一步挖掘数据融合的空间,比如,在目标跟踪中,选择共线度较小的 3个节点的测距信息即可实现较准确 的 定 位 跟 踪[10]。
为此,针对 WSN 中的目标定位跟踪应用,研究如何实时调度参与卡尔曼滤波融合的节点,从而在保证跟踪准确度的前提下,优化 WSN 生存时间。
2 预备知识
2.1 扩展卡尔曼滤波
卡尔曼滤波是由 Kalman 等人在 20 世纪 60 年代提出的一种递推滤波算法,它能够从一系列不完全包含噪声的测量中,估计动态系统的状态。Kalman 最初提出的滤波理论只适用于线性系统,扩展卡尔曼滤波则是在卡尔曼滤波的基础上针对非线性系统提出的一种改进方式,目前已被广 泛 应 用 于 目 标 定 位 跟 踪 领 域[11]。本 节 分 析 用 于 目 标 定 位跟踪的扩展卡尔曼滤波模型。
(1)状态方程模型
设 目 标 在 时 刻 k 的 状 态 为 Xk=[xk,υk,yk,uk]T,其 中 ,xk和 yk分别是目标在水平方向位置和垂直方向的位置,υk和 uk分别是目标在水平方向和垂直方向上的速度。那么,目标 在时刻 k+1 的状态 Xk+1根据式(1)所示的状态方程进行更新:

其中,ωk是系统噪声,其方差记为 Qk;Ak是系统转移矩阵,且,其中,τ是时槽间隔。
(2)观测方程模型
设节点 i的水平方向位置和垂直方向位置分别是 xi和 yi,它 在 时 刻 k 测 得 与 目 标 的 距 离 为 dik,则 有 :

其中,μk是测量噪声,其方差记为 Rk。首先对目标在时 刻 k-1 的 滤 波 结果进行预测,即,然后以预测结果的水平方向位置和垂直方向位置为平衡点,对式(2)展开泰勒级数并进行线性化处理,则得到:

进一步,设参与扩展卡尔曼滤波融合的节点数量为N,并记为:
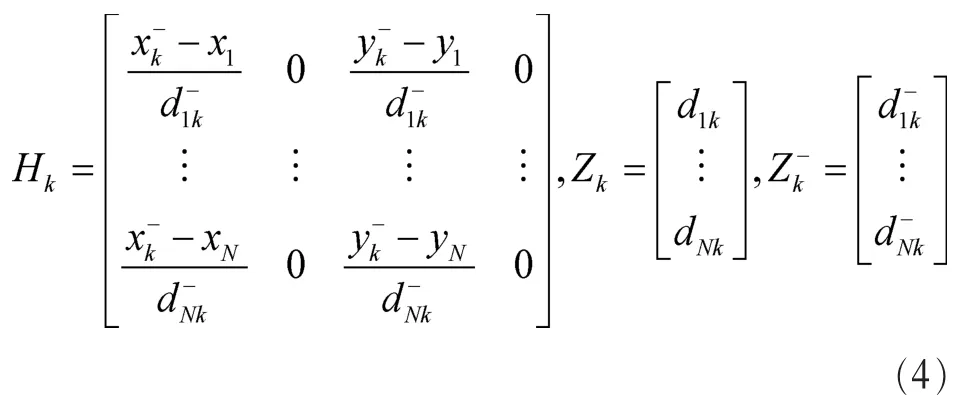
那么,观测方程可以写成:

根据上述状态方程和观测方程,扩展卡尔曼滤波的步骤如图1所示。
2.2 共线度
在二维空间中,只需获得 3个节点的测距信息即可对目标进行定位。然而,当选择的 3个节点共线或接近共线时 ,较 小 的 测 距 误 差 都 会 导 致 很 大 的 定 位 跟 踪 偏 离[12]。为了解决节点的共线问题,引入共线度 NC 的定义。共线度NC 定 义 为 节 点 组 成 的 三 角 形 中 最 小 角 的 余 弦 值[10]。 如 图 2所 示 ,节 点 A、B、C 组 成的 三 角 形 中 ,∠C 是 最 小 角 ,则 用∠C 的 余 弦 值 来 衡 量 A、B、C 这 3 个 节 点 组 的 共 线 程度,即:

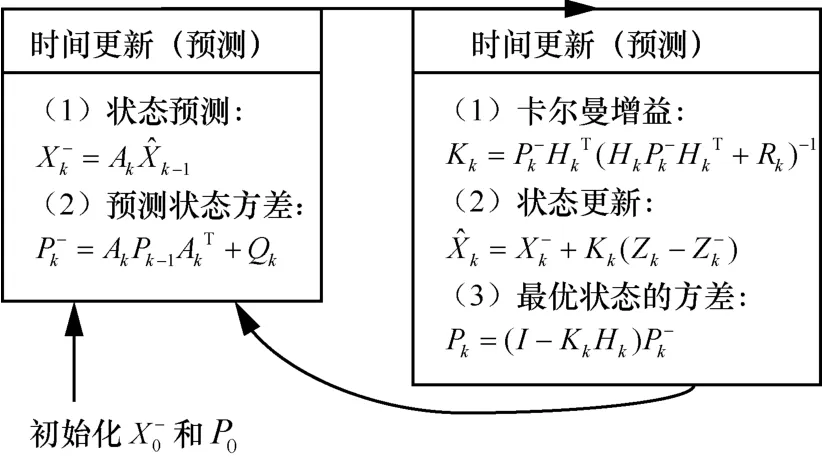
图1 扩展卡尔曼滤波的步骤

图2 共线度定义
因共线度定义为三角形最小角的余弦值,且最小角的取值范围为 0°~60°,故对应共线度 NC 的取值范围为0.5~1。因此从理论上分析,当 NC=0.5 时,表示节点组成的三角形是等边三角形,此时该组节点的定位效果最好;当NC=1 时,代表节点组在一条直线上,此时定位效果最差。但 通 过 MATLAB 仿 真 实 验 发 现[13]:当 3 个 节 点 离 目 标 较 远时,即使它们组成的三角形接近等边三角形,也会引起较大的定位误差;即使 3 个节点相距较远,只要它们不是完全共线,也能得到较理想的定位跟踪效果。上述两点说明在计算共线度时,还需要综合考虑节点间的距离、节点组与目标之间的距离等因素。因此,根据参考文献[13],将共线度的计算式(6)修改为:

其 中 ,dmin是 3 个 节 点 所 组 成 三 角 形 的 最 小 边 长 ,d 是两 个 节 点 之 间 的 最 小 允 许 距 离 ,lmin是 目 标 与 3 个 节 点 之 间的最小距离,r表征 3 个节点与目标之间的相对距离参数。
2.3 问题描述
对于大规模 WSN,数据需要经过多跳通信才能传送给 sink 节点,即每个传感器节点(以下简称节点)还承担路由功能,使得节点能量消耗大。故可通过部署多个 sink 节点来减少甚至消除节点承担路由器的次数,从而有效降低节点的通信能耗。如何优化部署多个 sink 节点的位置超出了 本 文研 究 范 围 ,有 兴 趣 的 读 者 可 阅 读 参 考 文 献[14,15]等。为方便分析,本文按地理位置将整个 WSN 区域均匀地划 分 成 多 个 小 区 域 ,并 在 每 个 小 区 域 内 部 署 一 个 sink 节点,如图 3所示。节点把对目标的测距信息发送给其所在 小 区 域 内 的 sink 节 点 ,sink 节 点 负 责 该 小 区 域 内 目 标定位跟踪的融合计算。为方便叙述与分析,作如下定义与假设。
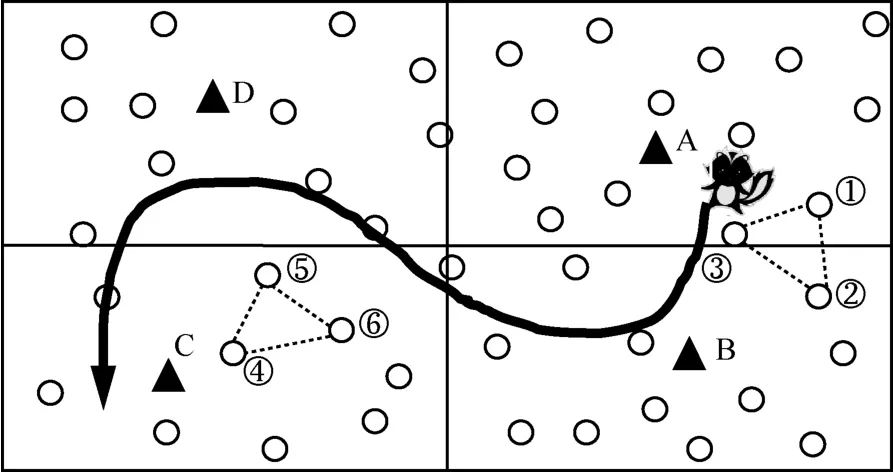
图3 簇状无线传感网目标定位跟踪
(1)节 点 的 初 始 能 量 均 为E,节 点 i的 剩 余 能 量 记 为Ei; sink 节点能量不受限制。
(2)节点能耗主要由发送测距数据给 sink 节点时产生。
(3)所有节点和 sink 节点的位置是固定不变的,节点 i发送 单 位比 特 数 据 到 所 在 小 区域 的 sink 节 点 j消 耗 的 能 量为:

其 中 ,dij表 示 节 点 i 与 sink 节 点 j 之 间 的 距 离 ,Eelec代表发送单位比特数据时的电路电子能耗,εfs是放大单位比特数据时所需要的电子能耗。
(4)sink 节 点 知 道 小 区 域 内 所 有 节 点 的 位 置 ,并 且sink 节点可直接与邻居小区域的 sink 节点通信。
(5)目标一旦进入某个小区域,该小区域内的节点均能检测到它,并获取测距信息。
因为 WSN 节点部署密集,所以同时有多个节点感知到目标并获取测距信息。这就造成了数据量大但冗余度高。为此,本文考虑选择共线度较小的 3个节点的测距信息用于该时刻的扩展卡尔曼滤波处理。进一步,为均衡各节点的能耗,如何调度节点组参与扩展卡尔曼滤波的融合处理是本文研究的重点和难点。
3 算法设计
3.1 算法描述
如上文所述,假设已按地理位置将整个 WSN 区域均匀地划分成多个小区域,并部署了能量不受限制的 sink 节点,如图 3 所示。在此基础上,本文关注如何选择共线度较小的3个节点参与扩展卡尔曼滤波融合处理来实现移动目标的定位跟踪,并优化网络生存时间。该问题包括:划分节点组、激活小区域及选择节点组。
3.1.1 划分节点组
在划分节点组时应考虑两个因素。第一个因素是节点是否同一个小区域。比如,图 3 中的节点 1、节点 2 和节点 3组成近似等边三角形且距离目标较近,理论上该组节点的定位跟踪效果较好,但它们在不同的小区域,难以管理与实现。另外,考虑到 WSN 节点部署密集,当目标出现在两个小区域的边界时,总能在某一个小区域内找到合适的节点组对目标定位跟踪。故本文只考虑同一小区域内的节点组划分。第二个因素是节点剩余能量。图 3 中的节点 4、节点 5和节点 6也组成近似等边三角形,但若它们的剩余能量很不均衡,节点 5 的剩余能量尤其少,那么它们也不宜被划分为一个节点组。因为一旦它们被选中参与定位融合,节点 5的能量将很快被耗尽。
基于上述两个因素,设测距信息的比特数为 g,被选中的节点组参与扩展卡尔曼滤波融合处理的次数(周期)为γ,sink 节 点 则 根据 小 区 域 内 节 点 位 置 和 剩 余 能 量 周 期 性 地对节点进行划分,使得 3个符合要求的节点组成一个节点组,见算法 1。
算法 1:每个 sink 节点 j周期性划分节点组。
步 骤 1 建 立 小 区 域 内 节 点 集 合 S={n1,n2,… }和 备 选节点组集合 G={};
步 骤 2 对 每 个 节 点 i,若 Ei≤gTE,则将节 点 i从 集合S中删除;
步骤 3 集合中的每 3个节点组成一个节点组,并根据式(7)计算其共线度 NC,若 NC<1,则将该节点组加入集合G中。
3.1.2 激活小区域
本文遵循“辖区管理”的原则,但其难点在于 sink 节点何时激活小区域内节点参与定位跟踪。 比如,当目标出现在图3所示的位置时,小区域 A和小区域B中的很多节点均能获取测距信息,那么由哪个小区域负责测距信息的融合处理呢?本文采取的措施为:当这两个小区域内的节点首次获取该目标的测距信息时,将测距信息发送给所在小 区 域 的 sink 节 点 ;两 个 sink 节 点 分 别 对 接 收 到 的 测 距信 息进行融 合 处理后,得到 目 标的估计 位 置 ;两 个 sink 节点交换各自计算的估计值,得到目标的平均估计位置;根据目标的平均估计位置所在的区域,确定由哪个小区域负责定位跟踪该目标。比如,定位误差使得目标的平均估计位置在小区域 B,那么小区域 B 负责定位跟踪该目标,小区域A内的节点可进入休眠状态以节省能量;一段时间后,若小区域B融合计算后的目标估计位置属于小区域C,则小区域 B 的 sink 节点将该估计 位置值发 送 给小区域C 的 sink 节 点,启动小区 域 C 进入定位 跟踪 过 程 ,小 区 域B则进入休眠状态。上述激活小区域的措施突破了区域边界的严格限制,较好地克服了定位跟踪误差带来的影响。这种措施贴近实际应用,简单、易实现。
3.1.3 选择节点组
某小区域被激活负责跟 踪 目标后,sink 节 点 如何在算法1的基础上实时调度参与扩展卡尔曼滤波融合处理的节点组是本文的核心部分,但目前很难找到有效的解决方法。受到贪心算法的启发,本文仅根据该小区域当前状况做出当前看来最好的节点组选择,力图在保证跟踪准确度的前提下,达到优化 WSN 生存时间的目的。但是,如何衡量节点组的好坏是关键与难点所在。比如,通过算法 1 得到 4 组符合要求的节点组,它们的共线度、节点剩余能量及与 sink 节点的距离见表 1。从表 1 可以看出,各个节点组各有优劣,如节点组1的共线度最小,故该节点组的定位跟踪效果最好,但该节点组的某一节点剩余能量较低且距离 sink 节点最远;节点组 2 的共线度和节点剩余能量不是很理想,但该组的 3 个节点均离 sink 节点很近。为此,综合考虑共线度、节点剩余能量及与 sink 节点的距离等因素,定义一个称为“节点组质量”的函数(设某节点组包含节点 a、b、c):

其中,min()计算出该节点组参与 γ次的定位跟踪后节 点 剩余 能 量 的 最小 值 ;M 则 表 示 max{min()},即 取 各 节点组参与 γ次的定位跟踪后,节点剩余能量的最小值中的最大值,M 用于归一化处理;α 和 β均是正常数,分别表示共线度因子和节点剩余能量因子。

表1 节点组当前的状况
将被选中的节点组参与扩展卡尔曼滤波融合处理的次数 γ定义为一轮。在每一轮初,sink 节点根据式(9)计算节点组集合 G(通过算法 1 得到)中的每个节点组质量,然后选择激活质量最高的节点组参与本轮的扩展卡尔曼滤波融合处理,其余节点则进入休眠状态。
3.2 算法流程
提出的算法主要在各 sink 节点上完成,小区域内节点根据 sink 节点发送的指令执行相关动作。算法的具体实现步骤见算法 2。
算法 2:提出算法的实现步骤
步 骤 1 初 始 化:sink 节 点 收 集 小 区 域 内各 节 点 的 位置和初始能量等信息,设定被选中的节点组参与扩展卡尔曼滤波融合处理的周期 γ;
步骤2 所有节点进入休眠状态。根据本文提出的激活小区域的措施,只有被激活的 sink 节点进入步骤 3;
步骤 3 sink 节点根据算法 1 对小区域内节点进行节点组划分,得到节点组集合 G;
步骤 4 sink 节 点根据式 (9)计 算 节点组集 合 G 中每个节点组当前的质量,并通过发送激活命令的形式激活质量最高的节点组;
步骤5 被激活的节点获取与移动目标之间的距离信息,并发送给 sink 节点;
步骤 6 sink 节点根据图 1 的扩展卡尔曼滤波步骤对收集到测距信息进行融合处理,得到目标的估计位置;
步骤 7 若目标的估计位置超出了该小区域,则根据本文提出 的 激 活小区域 的 措施激活 相 应 的 sink 节 点 使 之进入步骤 3,而该 sink 节点及小区域内的节点进入休眠 ,否则该 sink 节点直接进入步骤 8;
步骤8 若被选中的节点组参与扩展卡尔曼滤波融合处理的次数 γ已到,转向步骤 3,否则转向步骤 4。
4 仿真实验
4.1 仿真参数
为了检验所设计算法的可行性和有效性,本部分对算法进行仿真,仿真在 MATLAB 平台上进行。假设节点随机部 署 于 100 m×100 m 的 正 方 形 区 域 内 ,仿 真 区 域 被 均 匀 划分成 4 个小区域,在每个小区 域的中心位置布 置 一个 sink节点。目标不断地在区域内以随机位置为圆心做半径为25 m 的圆周运动。仿真中用到的其他共同参数见表 2。另外,定义网络生存时间为网络开始运行到网络中第 1个节点 能 量 耗 尽 的 这 一 段 时 间[16]。为 方 便 分 析 ,本 文 中 的 生 存时间计数方式是移动目标做完整圆周运动的次数。
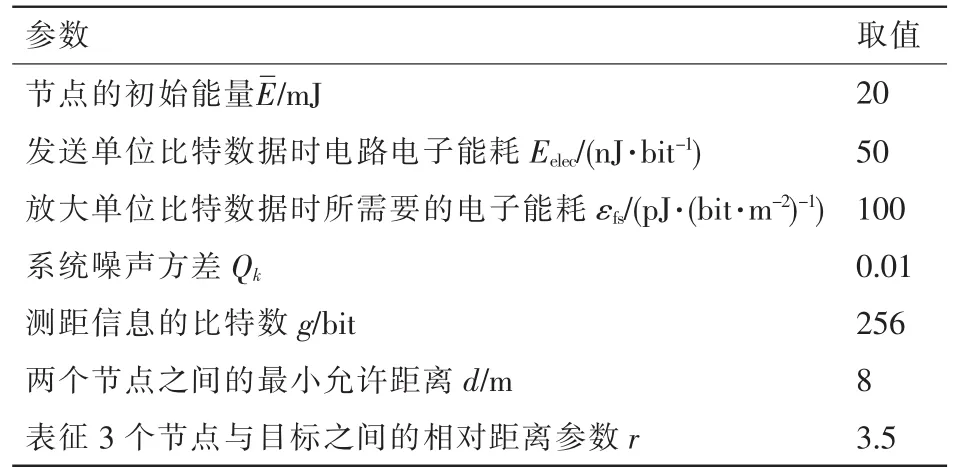
表2 仿真参数设置
4.2 算法比较
将本文提出的算法与其他两种方法进行比较分析。这两种方法分别是目标所在小区域内所有节点参与定位跟踪的方法(以下称 All方法)和目标所在小区域内随机选取 3 个节点参与定位跟踪的方法(以下称 Random 方法)。本部分设置共线度因子 α 和节点剩余能量因子 β为 1,即表示能量与定位准确度具有相同的权重。
4.2.1 测距噪声
设置节点总数为 100,目标移动的角速度为 2π/200,被选中的节点组参与融合处理的次数 γ为 20 次。随着测距噪声的变化,不同算法的网络生存时间和平均跟踪误差比较分别见表 3 和表 4。分析表 3 和表 4 可得:随着测距噪声的增大,本文算法和 All方法正如预期的那样,网络生存时间比较稳定,平均跟踪误差是递增的,而 Random 方法的生存时间具有较大的波动,平均跟踪误差也不完全是递增的(如R=15 和 R=20 时),这是由 Random 方法中节点选取的随机性造成的。由于 All方法中所有节点参与定位跟踪,其平均跟踪误差是最小的,但代价是网络生存时间大大降低。另外,本文算法兼顾了节点能量和共线度因素,在网络生存时间和平均定位跟踪误差上均优于 Random 方法。
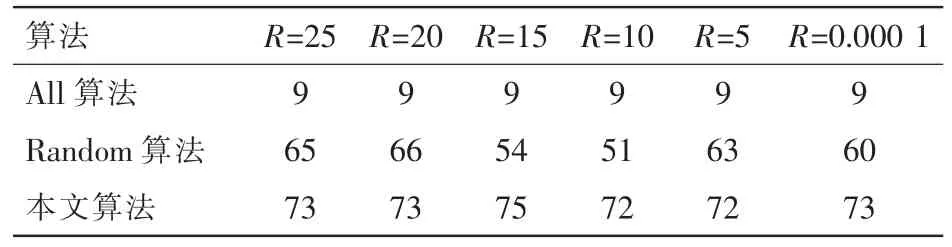
表3 随着测距噪声方差R的变化,不同算法的网络生存时间
4.2.2 目标移动速度
设置节点总数为 100,测距噪声方差为 10,被选中的节点组参与融合处理的次数 γ为 20次。随着目标移动的角速度变化,不同算法的网络生存时间和平均跟踪误差比较见表 5 和表 6(由于移动角速度不同,目标在相同时间内能完成的圆周运动次数是不同的。为便于观察,表 5中的生存时间转换成了相当于 w=2π/50 时的圆周运动次数)。分析表 5 和表 6 可得:当目标移动角速度增加到 2π/50 时,本文算法和 Random 方法的平均跟踪误差均较大,使跟踪结果偏移目标的运动轨迹。这说明本文算法和 Random 方法均不适用于快速运动的目标跟踪。当目标移动角速度小于或等于 2π/100 时,本文算法的平均跟踪误差比 All方法约大 1 倍,但网络生存时间延长了 7~8 倍;与 Random 方法相比,本文算法的平均跟踪误差降低了 8%~24%,且网络生存时间延长了 15%~40%。
4.2.3 节点密度
设置测距噪声方差为 10,目标移动的角速度为 2π/200,被选中的节点组参与融合处理的次数 γ为 20次。随着节点密度的变化,不同算法的网络生存时间和平均跟踪误差如图 4 所示。从图 4 中可以看出,当节点密度较低(节点数量为 20 个)时,3 种算法的网络生存时间几乎相同,All方法的平均跟踪误差明显小于 Random 方法和本文算法。这表明当节点密度较低时,All方法明显优于本文算法。但随着节点密度的增加,本文算法的优势逐步体现出来。具体地,网络生存时间随着节点密度的增加而延长,且当节点数量大于 80 个时,本文算法的网络生存时间明显大于 All方法和 Random,而其平均跟踪误差始终比较稳定且在可接受的范围内。可见,这正符合本文的研究动机,即在保证融合质量的前提下,充分消除由于节点部署密集引起的冗余信息,以达到减少通信量、降低计算复杂度和延长网络生存时间的目的。
总体说来,当节点密度和目标的移动角速度在相应的一定范围内时,本文算法能使跟踪结果不偏移目标的运动轨迹,且延长了网络生存时间。

表5 随着目标移动角速度 w的变化,不同算法的网络生存时间

表6 随着目标移动角速度 w的变化,不同算法的平均跟踪误差
4.3 参数和对算法的影响
设置节点总数为 100,目 标 移 动的角速 度 为 2π/200,测距噪声方差为 10,被选中的节点组参与融合处理的次数 γ为 20次,共线度因子 α 和节点剩余能量因子 β对本文算法性能的影响见表 7。正如预期,若算法在节点组选择时只考虑共线度而忽略节点剩余能量(即 α=1,β=0),平均跟踪误差是最小的,却大大缩减了网络生存时间。随着对节点剩余能量的重视(即 β值的增大),算法使得平均跟踪误差增大,网络生存时间有所延长。特别地,当只考虑节点剩余能量时(即 α=0,β=1),网络生存时间达到最大值。另外,由于算法在筛选备选节点组集合时已将定位跟踪效果较差的节点组剔除,故算法即使忽略共线度因素,也能将平均跟踪误差控制在可接受的范围内。

表7 参数α和β对算法的影响
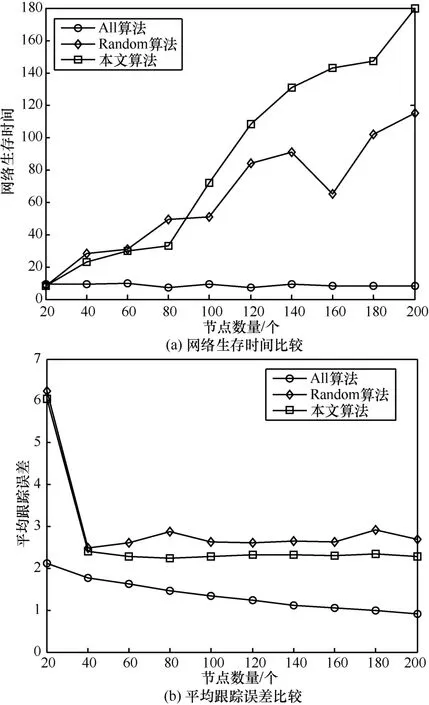
图4 随着节点密度的变化,不同算法的性能比较
4.4 参数对算法的影响
设置节点总数为 100,目标移动的角速度为 2π/200,测距噪声方差为 10,共线度因子 α 和节点剩余能量因子 β均为 1,被选中的节点组参与融合处理的次数 γ 对算法的影响如图 5 所示。由于节点部署具有随机性,当 γ 值为 60和 70时,平均跟踪误差或网络生存时间出现了较大的波动,但总体上还是具有一定的规律性。因为 γ值越小表示最优节点组选择越实时,所以平均跟踪误差越小,网络生存时间越长,但其代价是频繁的节点组划分与选择使算法运行速度降低。随着 γ值的不断增大,除节点部署随机性引起的波动外,网络生存时间呈缩短趋势,平均跟踪误差有所增大但趋于稳定在可接受的范围内。故在实际应用中,应综合权衡算法运行速度、网络生存时间和平均跟踪误差来选取γ的值。
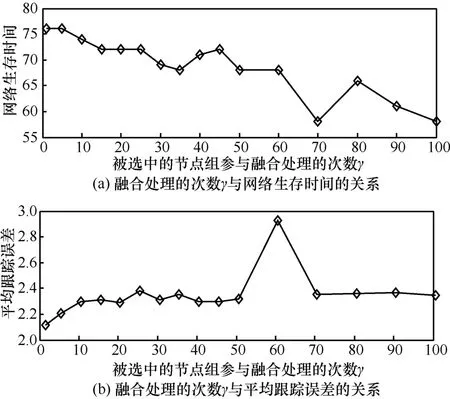
图5 参数对算法的影响
5 结束语
以定位跟踪为应用背景,基于扩展卡尔曼滤波融合法,设计了一种兼顾节点能量和跟踪误差的算法来实时地调度参与数据融合的 3个节点。仿真实验表明,当节点密度和目标的移动角速度在相应的一定范围内时,本文算法能使跟踪结果不偏移目标的运动轨迹,且与 Random 方法和 All方法相比,本文算法还能大大延长 WSN 生存时间。
[1] HALL D L,LLINAS J.An introduction to multi-sensor data fusion[J].Proceedings of the IEEE,1997,85(1):6-23.
[2] 陈军勇,邬依林,祁恬. 无线传感器网络分布式量化卡尔曼滤波[J]. 控制理论与应用,2011,28(12):1729-1739. CHEN J Y,WU Y L,QI T.Distributed quantized Kalman filtering for wireless sensor networks [J].Control Theory& Applications,2011,28(12):1729-1739.
[3] XU J,LI J,XU S.Data fusion for target tracking in wireless sensornetworks using quantized innovations and Kalman filtering [J].Science China Information Sciences,2012,55 (3):530-544.
[4] MAHFOUZ S,MOURAD-CHEHADE F,HONEINE P,et al. Target tracking using machine learning and Kalman filter in wireless sensor networks[J].IEEE Sensors Journal,2014,14(10):3715-3725.
[5] 张品,董为浩,高大冬. 一种优化的贝叶斯估计多传感器数据融合方法[J]. 传感技术 学报,2014,27(5):643-648. ZHANG P,DONG W H,GAO D D.An optimal method of data fusion formulti-sensorsbased on bayesian estimation [J]. Chinese JournalofSensorsand Actuators,2014, 27 (5):643-648.
[6] MO Y,SHI L,AMBROSINO R,etal.Networklifetime maximization via sensor selection [C]//The 7th IEEE Asian Control Conference,Aug 27-29,2009,Hong Kong,China.New Jersey:IEEE Press,2009:441-446.
[7] MO Y,GARONE E,CASAVOLA A,et al.Stochastic sensor scheduling forenergy constrained estimation in multi-hop wireless sensor networks [J].IEEE Transactions on Automatic Control,2011,56(10):2489-2495.
[8] YANG C,REN X,ZHENG J,et al.Sensor scheduling for communication resource minimization in centralized state estimation[C]//IEEE International Conference on Information and Automation,July 28-30, 2014,Hulun Buir,China.New Jersey:IEEE Press,2014:1166-1171.
[9] YANG C,WU J,REN X,et al.Deterministic sensor selection for centralized state estimation under limited communication resource[J].IEEE Transactions on Signal Processing,2015,63(9):2336-2348.
[10]孟文超,俞立,董齐芬,等.基于最优信标组的扩展卡尔曼定位算法[J]. 传感技术学报,2011,24(4):581-586. MENG W C,YU L,DONG Q F,et al.Extended Kalman localization algorithm based on the best beacon group[J].Chinese Journal of Sensors and Actuators,2011,24(4):581-586.
[11]YIM J,PARK C,JOO J.Extended Kalman filter for wireless LAN based indoor positioning [J].Decision Support Systems,2008,45(4):960-971.
[12]吴凌飞,孟庆虎,梁华为.一种基于共线度的无线传感器网络定位算法[J]. 传感技术学报,2009,22(5):722-727. WU L F,MENG Q H,LIANG H W.A collinearity-based localization algorithm for wireless sensor networks [J].Chinese Journal of Sensors and Actuators,2009,22(5):722-727.
[13]董齐芬,盛蒙蒙.WSNs 目标跟踪中的节点组选择机制研究[J].计算机时代,2015(12):10-12. DONG Q F,SHENG M M.Node group selection scheme for target tracking in wireless sensor networks [J].Computer Era,2015(12):10-12.
[14]潘耘,李嫣,李 晋 凯,等. 无线传感 器网 络 中的 多 Sink 节 点的放置问题[J]. 计算机研究与发展,2010,47(S2):92-95. PAN Y,LI Y,LI J K,et al.Multiple sink node placement problems in wireless sensor networks [J].Journal of Computer Research and Development,2010,47(S2):92-95.
[15]徐 久 强,柏 大治,罗玎 玎,等. 遗 传算 法在 WSNs 多 Sink 节点布局 中 的应 用 [J]. 东 北大 学 学报 (自 然 科 学版),2008,29(6):815-818. XU J Q,BAI D Z,LUO D D,et al.The application of genetic algorithm to deployment of multiple sink nodes in WSNs [J]. Journal of Northeastem University (Natural Science),2008,29(6):815-818.
[16]朱艺华,杨晨曦,吴万登,等.无线传感器网络权衡生存时间与数据分组跳数的分流路由算法[J]. 传感技术学报,2009,22(2):273-279. ZHU Y H,YANG C X,WU W D,et al.Diffluent traffic routing algorithms trading off network lifetime and number of packet hops for wireless sensor networks [J].Chinese Journal of Sensors and Actuators,2009,22(2):273-279.
Data aggregation in wireless sensor network for optimizing network lifetime
DONG Qifen1,CHEN Hongyu2,LI Guojun1,WANG Kang1,HONG Zhen3
1.Department of Computer Science,Zhejiang Police College,Hangzhou 310053,China 2.Department of Public Security Technology,Railway Police College,Zhengzhou 450053,China 3.School of Mechanical Engineering and Automation,Zhejiang Sci-Tech University,Hangzhou 310018,China
Taking target tracking in wireless sensor network (WSN)as application background,data aggregation for optimizing network lifetime based on extended Kalman filter method was researched,and an algorithm which considered both tracking accuracy and node energy to real-time schedule node groups involved in the data integration was designed.Simulations show that the proposed algorithm makes the tracking results do not deviate from the trajectory of target as long as the target speed is within a certain speed range.In addition,compared with the Random method and the All method,the proposed algorithm greatly prolongs network lifetime.
wireless sensor network,optimizing network lifetime,data aggregation,Kalman filter
s:The National Natural Science Foundation of China(No.61304256,No.U1509219),The Natural Science Foundation of Zhejiang Province(No.LQ13F030013)
TP393
:A
10.11959/j.issn.1000-0801.2016139

董齐芬(1985-),女,博士,浙江警察学院计算机与信息技术系讲师,主要研究方向为无线传感网、优化算法。

陈红玉(1981-),女,铁道警察学院公安技术系讲师,主要研究方向为电子数据取证、网络安全技术。

李国军(1979-),男,浙江警察学院公共基础部数理教研室讲师,主要研究方向为学习控制。
王亢(1978-),女,浙江警察学院计算机与信息技术系副教授,主要研究方向为无线网络及安全。
洪榛(1983-),男,博士,浙江理工大学机械与自动控制学院副教授, 主要研究方向为物联网/传感器网络理论与应用、智能优化、智慧城市、数据处理分析等。
2016-02-23;
:2016-05-05
国 家 自 然 科 学 基金资助项目(No.61304256,No.U1509219);浙江省 自 然 科 学 基 金资助项目(No.LQ13F030013)
猜你喜欢
中学生数理化·高一版(2023年2期)2023-03-23 02:17:06
新高考·高一数学(2022年3期)2022-04-28 07:02:46
中等数学(2021年4期)2021-08-14 02:34:40
科学(2020年3期)2020-01-06 04:02:51
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
电子制作(2017年7期)2017-06-05 09:36:13
高中生·天天向上(2016年4期)2016-05-04 08:59:10
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55