多线阵光电立靶弹丸攻角测量*
2016-06-24 01:56鲁成刚王延杰姚志军
传感器与微系统 2016年5期
关键词:攻角
鲁成刚,王延杰,姚志军,张 雷,2,樊 博,2
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
多线阵光电立靶弹丸攻角测量*
鲁成刚1.2,王延杰1,姚志军1,张雷1,2,樊博1,2
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
摘要:基于立靶坐标交汇测量原理,介绍了传统单线阵CCD立靶系统,并对单线阵CCD立靶系统中弹丸攻角测量方法进行了分析,指出了其中存在的扫描帧频不足和弹头、弹尾着靶点距离误差的问题。在此基础上,提出了一种新的多阵列光电立靶测量系统的布设方法,利用6个交汇列图像在空间交汇组成光幕阵列,根据飞行弹丸穿越不同光幕阵列的时刻和多光幕立靶系统结构参数,提出了一种新的计算弹丸攻角的方法。利用多线阵光电立靶测量系统巧妙地避免了弹头、弹尾着靶点距离误差对测量结果的影响,保证了测量精度,降低了系统成本。
关键词:光电立靶;多阵列;坐标测量;飞行弹丸;攻角
0引言
弹丸在飞行过程中受到空气动力等诸多因素的影响弹丸中轴线与弹丸飞行速度方向会产生一定夹角。这个夹角就叫做弹丸攻角。弹丸攻角越小,说明弹丸飞行稳定性越好,打击能力越强;反之,则弹丸稳定性越差,打击能力越弱。因此,攻角的测量有着非常重要的意义。传统的弹丸攻角测量方法主要包括纸靶法、狭缝摄影法等等,这些方法存在着操作复杂、受人为影响大、实时性差、测量数据保存不便等缺陷。随着CCD立靶技术的日渐成熟,线阵CCD立靶测量系统由于测量精度高、实时性好、数据存储方便等优势逐渐被运用在枪弹性能测试中[1]。
本文从线阵CCD立靶测量系统的原理出发,阐述了线阵CCD立靶测量系统对弹丸攻角的测试原理,对已有的CCD立靶系统对弹丸攻角测量的方法进行了研究,并针对传统CCD立靶系统测量弹丸攻角方法中的不足进行了分析,指出了其中存在的扫描频率不足和弹头、弹尾着靶点距离误差的问题。提出了多阵列光电立靶测量系统的设计布局,利用6个交汇列图像在空间交汇组成光幕阵列,根据飞行弹丸穿越不同光幕阵列的时刻和多阵列立靶系统结构参数,提出了一种新的计算弹丸攻角的方法。利用多线阵光电立靶测量系统不但提高了系统扫描频率,同时有效地避免了弹头、弹尾着靶点距离误差的问题[2,3]。
1CCD立靶交汇测量原理
交汇测量技术是CCD立靶测量系统实现弹丸着靶位置测量的基本原理。测量系统由两台放置在竖直平面内的线阵CCD相机构成,两台CCD相机处于同一水平线,调整CCD相机向上仰起同一角度,使其光轴相交于一点,同时使光轴与水平线共面,两台CCD相机的视场重叠区域即构成虚拟靶。当目标穿越靶面时,通过捕获光幕光通量的变化,两台相机记录下越靶目标的位置信息,进而通过几何关系换算得出越靶目标的着靶坐标[4]。
2CCD立靶测量弹丸攻角原理
弹丸飞行过程中弹丸速度方向与弹丸中轴线夹角即为弹丸攻角。弹丸攻角可由线阵CCD立靶测量系统测出,原理如图1所示。
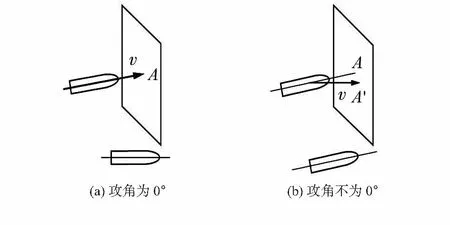
图1 攻角测量原理图Fig 1 Principle of attack angle measurement
CCD相机记录目标穿越靶面时的多幅图像,结果保存在中心计算机中,经过处理就可以根据弹丸不同部位的越靶坐标计算出目标攻角。
当弹丸速度方向与弹丸轴线重合,即攻角为零时,如图1(a),弹丸的弹尖与弹尾会在同一坐标点越过靶面,CCD相机记录的各幅图像中目标位置为同一坐标,因此,可以判断弹丸攻角为零。
当弹丸速度方向与弹丸轴线方向不重合,即攻角不为零时,如图1(b),飞行弹丸弹头到飞行弹丸弹尾的弹体轴线将逐渐进入CCD靶面,弹体不同部位将会被不同的像元所采集,因此,测量系统测得弹丸坐标将不是同一坐标。本文可以根据弹丸弹头与弹尾的坐标和子弹长度算出弹丸的攻角数值。
由CCD立靶系统采集到的图片可得弹头与弹尾着靶点分别为A(x1,y1)和A′(x2,y2),有
(1)
当弹丸长度为l时,就可以得出攻角计算公式
(2)
3单阵列CCD立靶系统技术难点
由于CCD技术的限制,弹丸攻角测量时会产生以下问题:
1)图像采集速度与弹丸飞行速度不匹配造成目标图像发生形变,相机的扫描速度要小于弹丸的飞行速度时,CCD采集图像被压缩[5]。
2)由于无法保证弹头入靶和弹尾立靶时刻CCD相机处于图像采集状态而造成的弹长误差,使式(2)中AA′的数据产生误差。
4光电立靶测量系统的多线阵工作模式
基于以上单线阵CCD立靶测量系统缺陷的考虑,本文提出了多线阵光电立靶系统的设计,即采用光电相机的多阵列工作模式使用多个相机阵列同时曝光。根据实测弹丸尺寸和速度调节各靶面间距和角度。系统开始工作时,各相机阵列同时曝光,这样相对于单阵列相机来说立靶系统的扫描速度可以大大提高。同时,多线阵工作模式还可以根据弹丸速度的不同方便地调节扫描频率。这样就解决了单线阵相机扫描频率不足的问题。
4.1多阵列光电立靶系统的系统布局设计
立靶系统采用2台光电相机,设置多线阵工作模式,分别开启6列光幕阵列,使其两两相交形成光幕靶面。设中靶时刻弹速1 000 m/s,一帧时间内运动20 mm,1 m×1 m光电靶中心区域的像元分辨率0.728 mm,根据弹长12.4 mm,光电靶为中心,两侧间隔8个像元( 12.4/0.728=17)分别设定为多线阵的第三列与第五列,第二列与第六列,根据弹丸速度,设置第一列与第二列间隔为27个像元(20/0.728=27列),如图2所示。第四列确保两站可以准确交会,准确测量中靶位置,第二列与第三列,第五列与第六列确保弹丸可以连续成像,组成准确的弹丸中轴线,第一列确定弹丸入靶点,用于计算弹道使用。
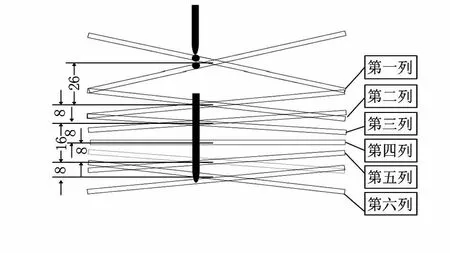
图2 多阵列光电立靶系统的系统布局设计Fig 2 Layout design of multi-linear array photoelectric vertical target system
4.2图像传感器的选取
根据系统技术要求,设弹丸长度为12.4 mm,弹丸的飞行速度约为800 m/s,测量相机的帧周期要小于弹丸渡越光幕靶的时间,因此,要选择扫描帧频比较高的图像传感器。
根据系统设计需要,对比面阵高速图像传感器和sCMOS图像传感器[6]。面阵高速图像传感器的优点是:灵敏度高,噪声小;帧频高,可多列数据输出,适合用于弹丸攻角测量,为系统升级、功能拓展提供保障;简化结构,易于操作,装调、维护简便。
4.3多阵列光电立靶系统越靶目标坐标的获取
两台相机相对向上仰起一定的角度,在空中交汇出一个虚拟靶面,形成光电立靶系统。测量系统在电源和触发信号的驱动下完成图像采集,中心计算机中的实时图像处理器将图像信息传入计算机中,计算机读出立靶系统所获取的图片并进行分析处理,得到高速弱小的弹丸目标。同时,为减小室外环境对测量结果的影响,系统采用激光照明。
如图3所示,两台相机分别位于A,B两处,设AB=d0,OM=h0。弹丸分别在像机1和像机2成像,像点分别距光心A1,A2个像元单位,并且其正负规定为在光心上方为正,反之为负,αi=A1da/f1和βi=A2da/f2分别是通过图像处理得到的两摄像机镜头的轴外物点p的物方角,轴外像点对应的像方角与物方角相等,其中,da为线阵像机相机的像元间距,f1,f2为相机镜头焦距。由d0和h0确定坐标原点后,根据正弦定理和三角关系可得p点的坐标为[7,8]
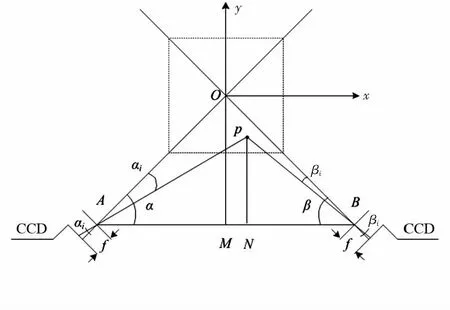
图3 坐标测量原理图Fig 3 Principle of coordanite measurement
(3)
4.4弹丸着靶坐标误差分析
由坐标计算式(3)、式(4)可知,弹丸的坐标位置受布站距离L、两台测量站的仰角α、弹丸在测量站的成像位置A、测量摄像机的焦距f等参数影响,分别对L,A,f,α求偏微分,则x,y方向上的总误差可表示为[4]
(4)
1 m靶面:d0=2 000 mm,da=0.007 mm,α=β=45°,f1=f2=13.6 mm,按照两站距离测量误差3.43 mm,焦距测量误差0.1 %,俯仰角测量误差为3′,弹丸单站测量位置误差为0.5个像素,经过仿真可以得出x最大误差0.52 mm,y最大误差为0.65 mm。弹丸位置总误差为:(0.522+0.652)/2=0.587 mm。
4.5弹丸攻角测量
4.5.1弹丸速度轨迹拟合
1)求取中心坐标序列
利用弹丸在六列光电立靶阵列上成像的时间和坐标拟合出弹丸速度轨迹。提取每列立靶阵列记录到的首幅弹丸图像作为研究对象。弹丸成像在每一列立靶阵列上占据数个像元,各列提取的像元坐标分别为[9]
(t1,Y1),(t1,Y2),…,(t1,Ym),
(t1,L1),(t1,L2),…,(t,Ln),…
(t1,S1),(t1,S2)…(t1,Sk)
(5)
利用平均法计算中心坐标,则中心坐标为
(6)
每列的中心坐标组成中心坐标序列,然后就可以通过中心坐标序列拟合直线。
2)速度轨迹拟合方程
利用最小二乘法拟合速度轨迹。
设弹丸运动时间t和弹丸越靶位置y之间的函数关系为直线方程
y=a0+a1t
(7)

(8)
4.5.2根据弹丸运动轨迹和立靶间几何关系求解弹丸攻角
以测量过程中未能精确测量到弹头、弹尾越靶时刻坐标为例,如图4所示:A点为弹丸越靶时第二列光幕捕捉到的首帧图像目标坐标点,t1为捕获时刻;B点为弹丸越靶时第二列光幕捕捉到的最后一帧图像目标坐标点,t2为捕获时刻;A′点为t2时刻A点在空间中的位置,A′位置由弹丸轨迹方程和t2可算出。在三角形AA′B中,α可由弹丸运动轨迹方程求得,θ为弹丸运动轨迹与弹丸轴线的夹角,即为弹丸攻角。
求解方程组
(9)
可得弹丸攻角θ为
(10)
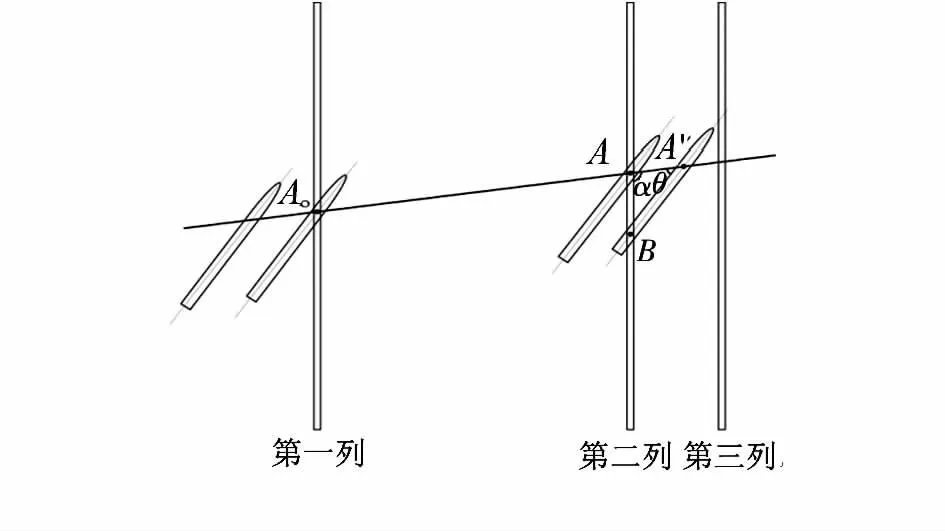
图4 弹丸攻角测量示意图Fig 4 Measurement of attack angle of projectile
5攻角测量误差分析
使用文中提到的新的攻角测量方法将不会产生弹长误差。弹丸过靶时弹头与弹尾着靶点A和B点的距离误差主要由A和B点的坐标测量误差而引起,根据误差独立原则,可以得出AB的测量误差为
σAB=
(11)
根据工程实践经验,为了简化分析计算取
σx1=σx2=σy1=σy2=σmax
(12)
则有
σAB=2σmax
(13)
因此,结合弹丸攻角计算公式以及函数系统误差计算公式,可以得出弹丸的攻角测量误差为
(14)
式中攻角测量弹丸弹长l=12.7 mm。
攻角测量误差曲线如图5所示。
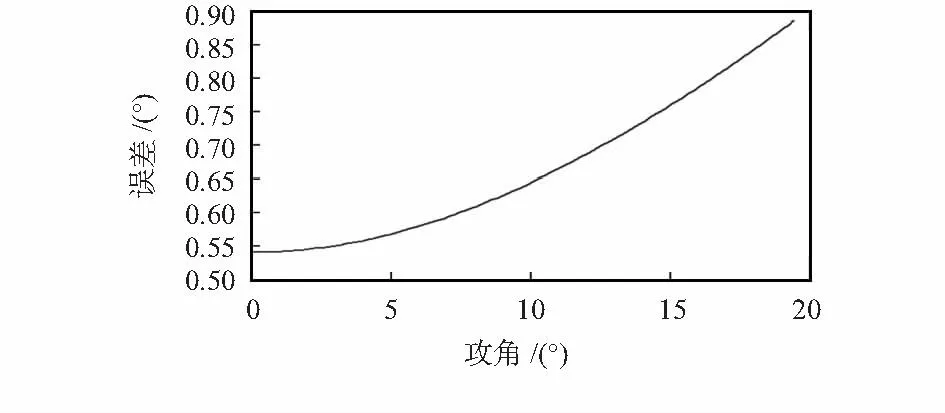
图5 攻角测量误差曲线图Fig 5 Measurement error curve of attack angle
由图5可以看出,攻角测量误差为0.5°~0.9°,符合设计要求。
6结论
在以往立靶系统对弹丸攻角的测量中最常使用单线阵CCD立靶系统进行测量,由于受到设备和测量方法的限制,往往会出现扫描频率不足和不能准确捕获弹头着靶和弹尾离靶图像的问题,大大影响了测量的精确性。本文提出了一种新的多阵列光电立靶系统布设方案,不但有效地提高了立靶系统的扫描频率问题,同时利用靶面间的关系找到了一种新的弹丸攻角测量方法,成功解决了弹头弹尾着靶点距离误差的问题,使测量精度得到了大大提高。
参考文献:
[1]倪晋平,魏建凯.天幕靶技术研究进展[J].西安工业大学学报,2011,31(7):589-593.
[2]王小力.基于线阵CCD的飞行目标章动角测试技术研究[D].西安:西安工业大学,2011:36-57.
[3]蔡荣立,倪晋平,田会.光幕靶技术研究进展[D].西安:西安工业大学,2013:603-609.
[4]何丹.基于线阵CCD的高速弱小目标提取算法研究[D] .西安:西安工业大学,2013:40-65.
[5]乔梁,鲁飞,宋海涛,等.CCD在外弹道测试领域的应用[J].传感器与微系统,2008,27(11):103-104.
[6]田园.多目标立靶密集度测试技术研究[D].西安:西安工业大学,2010:21-54.
[7]彭凯,刘丽冰,刘书桂.基于双相机的计算机视觉坐标测量系统[J].光电工程,2008,35(7):95-98.
[8]Davis L R,Brown T E.Photocell array sensor for projectile position detection:US,6617563B[P].2003—09—09.
[9]倪晋平,田会.用于光幕测试的时刻信息提取方法研究[J].光学技术,2008,34(1):141-148.
Attack angle measurement of projectile with multi-linear array photoelectric vertical target*
LU Cheng-gang1,2,WANG Yan-jie1,YAO Zhi-jun1,ZHANG Lei1,2,FAN Bo1,2
(1.Changchun Institute of optics,Fine Mechanics and Physics,Chinese Academy of Sciences, Changchun 130033,China;2.University of Chinese Academy of Sciences,Beijing 100049,China)
Abstract:Traditional vertical target system of single-linear array CCD based on measuring principle of coordi-nate-intersection is introduced,and attack angle measurement method of projectile in single-linear CCD vertical target system is analyzed.Problem of shortage is mainly caused by low scanning frame rate and error in measuring position of head and the tail-end of projectile on target is pointed out.On this basis,a new layout method for multi-linear array vertical target system is put forward to measure attack angle of projectile,six images of vertical image are used to construct light screen array,a new measuring method is proposed based on time that projectile go through different light screen array and structure parameters of multi light sceen vertical target system.Using the multi-linear vertical target system avoid influence of error in measuring position of head and the tail-end of the projectile on measurement result.Assure measurement precision and reduce system cost.
Key words:phrotoelectric vertical target;multi-linear array;coordanite measurement;flying projectile;attack angle
DOI:10.13873/J.1000—9787(2016)05—0032—04
收稿日期:2015—08—04
*基金项目:国家“863”高技术研究发展计划资助项目(2012AA7031010B)
中图分类号:TJ 206
文献标识码:A
文章编号:1000—9787(2016)05—0032—04
作者简介:
鲁成刚(1989-),男,新疆乌鲁木齐人,硕士研究生,主要研究方向为数字图像处理。
猜你喜欢
传感器与微系统(2022年12期)2022-12-10
宇航总体技术(2019年5期)2019-10-11
兵器装备工程学报(2019年7期)2019-08-13
上海电力大学学报(2019年1期)2019-03-05
汽车零部件(2018年8期)2018-09-06
火力与指挥控制(2017年11期)2017-12-19
北京航空航天大学学报(2017年7期)2017-11-24
中国惯性技术学报(2016年2期)2016-04-13
中国设备工程(2016年18期)2016-03-06
振动与冲击(2015年2期)2015-05-16