基于点云均匀度的植被点剔除方法
2016-06-23 02:32:16胡大贺
中国矿业 2016年5期
陈 朋,李 亮,胡大贺
(1.中国矿业大学环境与测绘学院,江苏 徐州 221116;2.苏州市测绘院有限责任公司,江苏 苏州 215007)
基于点云均匀度的植被点剔除方法
陈朋1,李 亮1,胡大贺2
(1.中国矿业大学环境与测绘学院,江苏 徐州 221116;2.苏州市测绘院有限责任公司,江苏 苏州 215007)
摘要:针对植被点影响三维激光扫描仪获取开采沉陷盆地精度的问题,提出一种基于点云均匀度的树木点剔除方法。首先构建以点k-邻域的最大坐标差为边长的虚拟立方体,以及包围该点集的最小长方体,通过最小长方体与虚拟立方体的体积比来判别植被点。研究结果表明,该方法可较好的识别树木和低矮的杂草等植被点,可以提高开采沉陷盆地的精度。
关键词:三维激光扫描;沉陷盆地;均匀度;虚拟立方体;植被点
地面三维激光扫描能快速、方便、高精度地获取各种大型、复杂、不规则的静态物体三维表面模型,模型数据是由离散点所组成。所获得的数据可以用成图、建模和分析等工作[1]。郭文兵等[2]、陈冉丽等[3]研究了利用三维激光扫描仪获取沉陷盆地的方法和步骤。在获取沉陷盆地数据时,由于三维激光扫描采所获得的数据包括地面点、植被和噪声点等信息,需要将植被点等剔除才能获取较高精度的沉陷盆地数据。
在植被剔除方面,严剑锋等[4]提出基于最小二乘拟合的三维激光扫描点云滤波方法,首先进行二次曲面拟合,去除误差较大的点,然后选取较为准确的多面函数拟合点,进行二次滤波,该方法可较好的去除植被点云,可用于生成准确的DEM;龚亮等[5]基于多尺度虚拟网格与坡度阈值对点云滤波,该方法可以有效的剔除植被等非地面点。这些方法利用一个大尺度的移动窗口,通过一定数量的地面点拟合一个粗略的地形模型,然后将高差超过阈值的点滤掉,其可剔除大部分植被,但对于一些低矮密集的植被点,由于地面点很少,难以拟合出地面模型,故这部分植被点很难剔除。针对此问题,通过对激光点云空间分布的分析发现,局部空间内,地面点主要集中在平面附近,均匀度较低,而树木点则充满该空间或分布在该空间的较大范围内,均匀度较高。因此,本文提出一种基于点云均匀度的植被点剔除方法,利用点云在局部空间内分布的特点来判别树木及低矮密集的植被点,并将剔除植被的点云用于沉陷盆地的生成,说明本文算法可生成较高精度的沉陷盆地。
1算法描述
本文引入有限点集分布均匀性的度量思想来评价点云在局部空间内分布的均匀程度。
1.1有限点均匀性度量方法

为y1,y2,…,yn中落入P的点数,则,见式(1)。
(1)
称为点集y1,y2,…,yn在Cm中的偏差。
用偏差来度量均匀性时,一般认为偏差越小则点集均匀性越好。当y1,y2,…,yn恰好全部落入子立方体P内,即np=n时,若P的体积V(P)的值较大,则D(y1,y2,…,yn)较小,均匀性更好;反之,均匀性差。
1.2算法原理
基于对有限点集分布均匀性的度量思想,对于本文中局部空间内点云的均匀度的度量:首先搜索点A的k-邻域,然后以A为中心,k-邻域点集K的最大坐标差为边长构建虚拟立方体C3,由于点的密度不同,不同点的k-邻域所构成的虚拟立方体大小也不同,且必然存在一个最小长方体恰好包围点集K,如图1所示。长方体的边可不与坐标轴平行。根据偏差的定义,当最小长方体恰好包括点集内所有点时,即np=n,记虚拟立方体的体积为Vcube,长方体的体积为VK,则虚拟立方体内点集K的均匀度表示见式(2)。
(2)
式中,若VK/Vcube较大,则D(K)较小,点集空间分布均匀度较高;若VK/Vcube较小,则D(K)较大,点集空间分布均匀度较低。
如图2、图3所示,在虚拟立方体内,地面点主要集中在平面附近,VK/Vcube较小,偏差大,点集均匀度较低;而植被点则分布在该空间的较大范围内,VK/Vcube较大,偏差小,点集均匀度较高。因此,根据这一点云分布的特点,可以判别植被点,将长方体与虚拟立方体的体积比VK/Vcube作为判别指标,与设定的阈值λ进行比较以确定点A的属性。①若VK/Vcube>λ,点A为植被点;②若VK/Vcube<λ,点A非植被点;对所有点云进行判断,从而完成植被点云的判别。
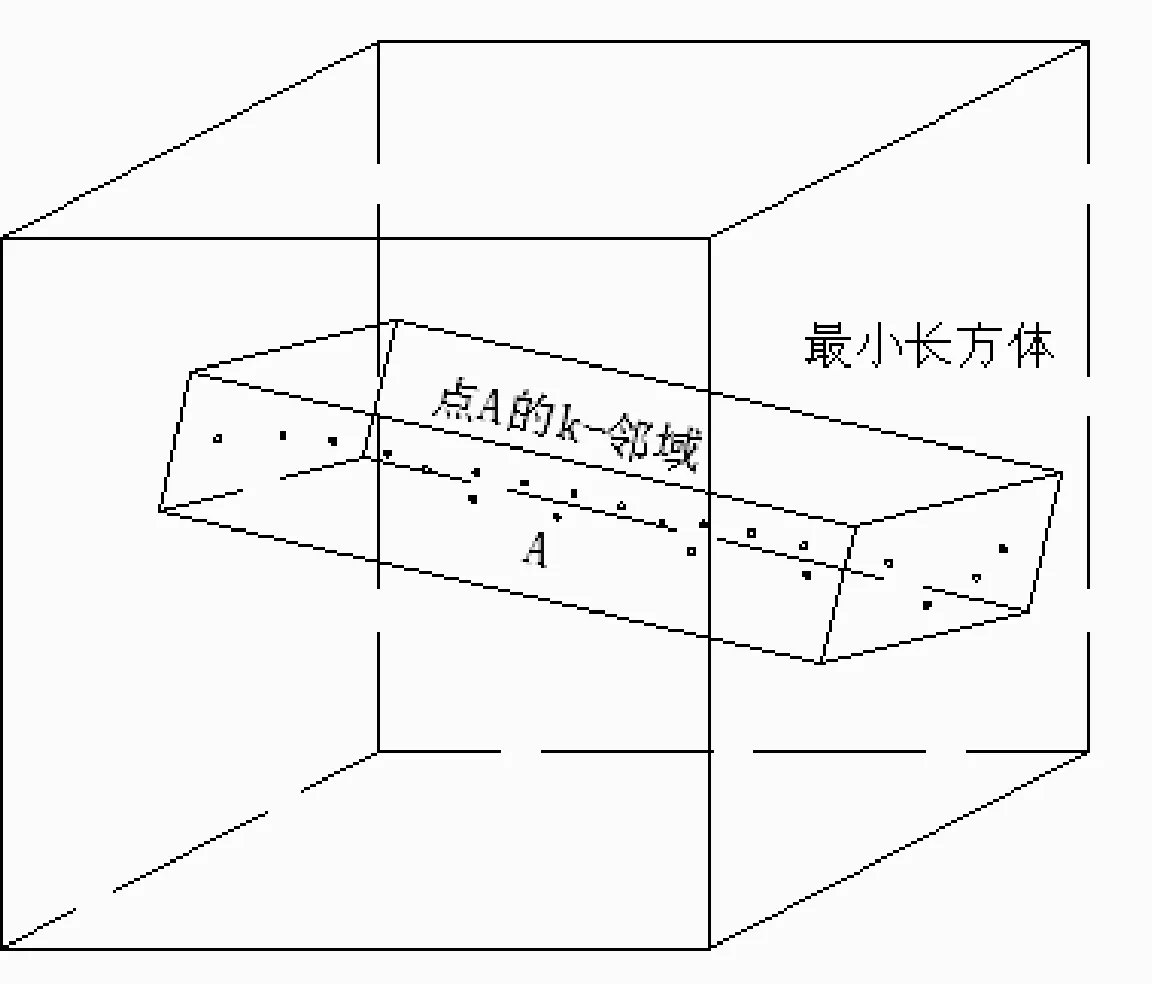
图1 虚拟立方体
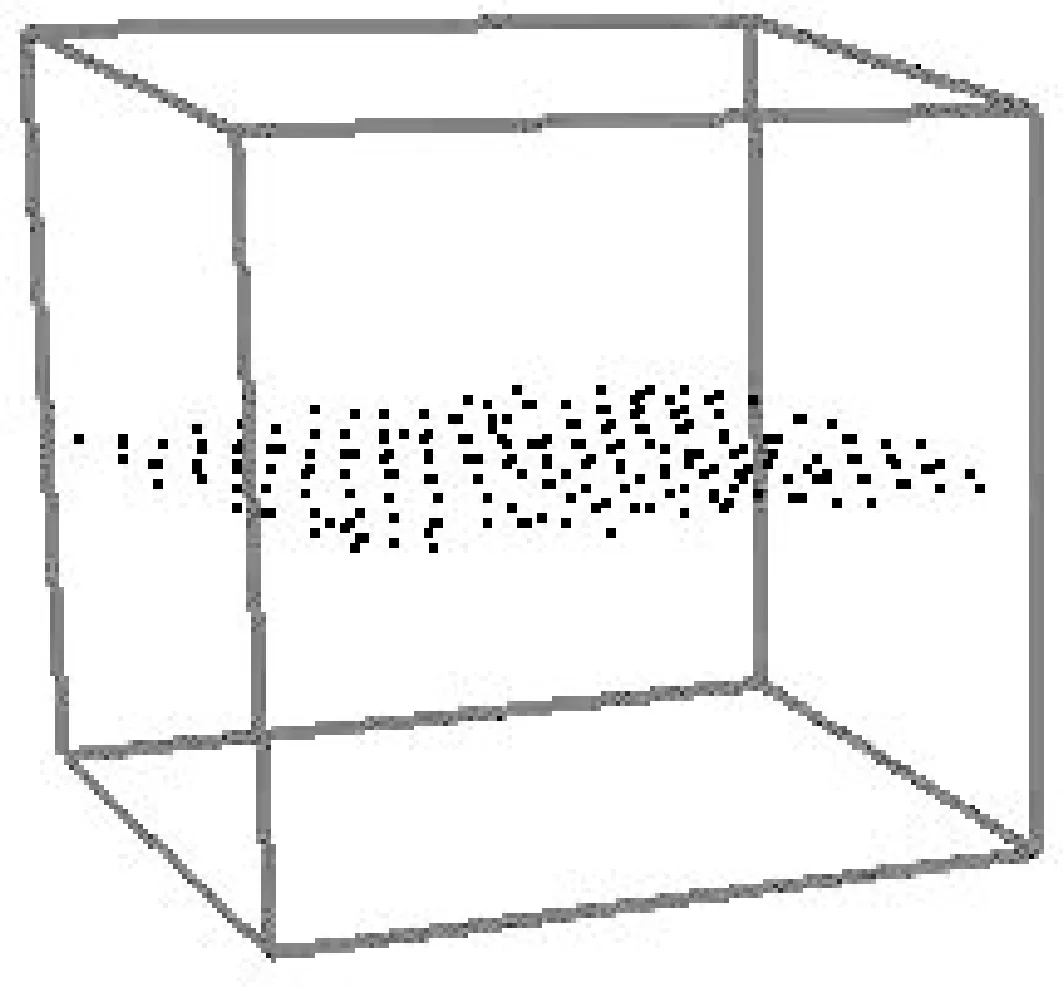
图2 地面点
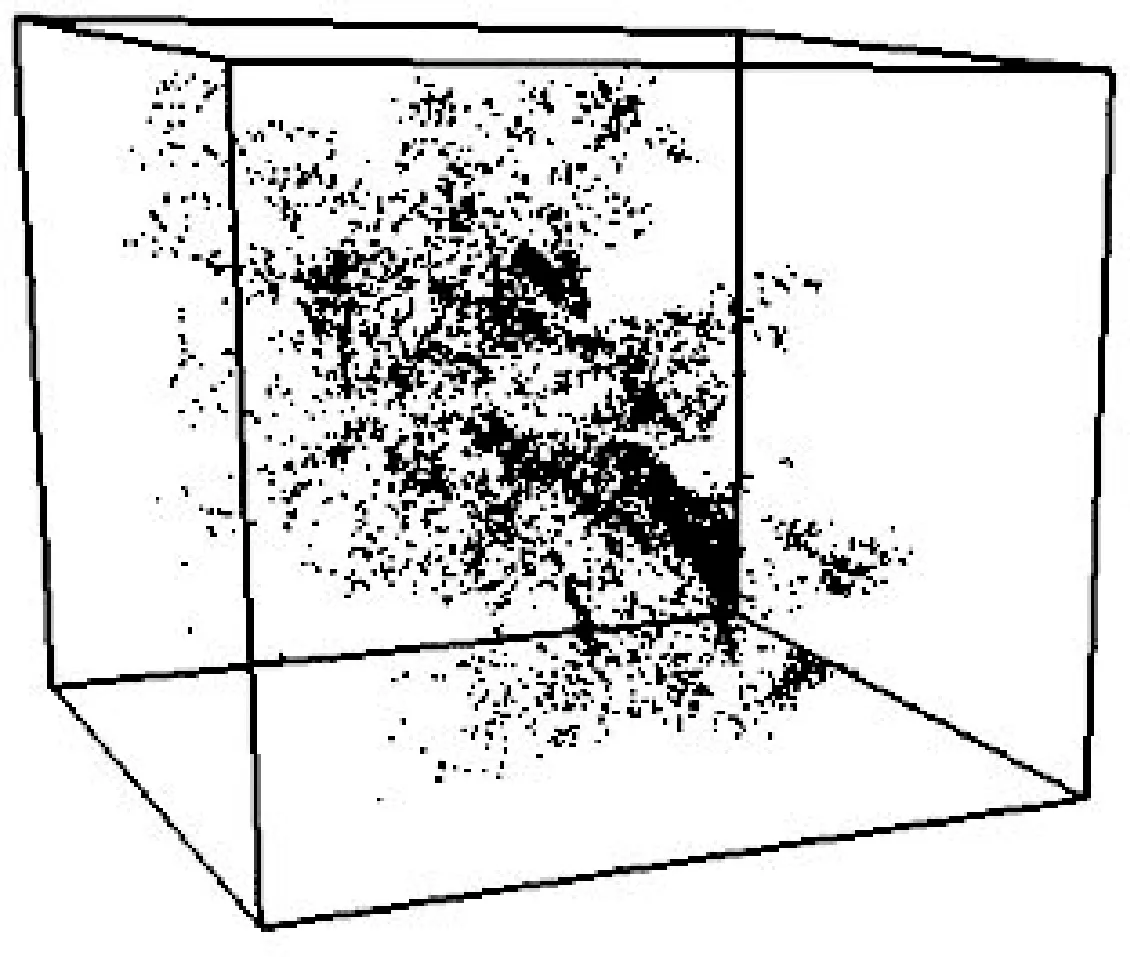
图3 植被点
2实例与分析
三维激光扫描仪获取沉陷盆地的原理是利用采煤前后两次采集的点云数据构建沉陷区DEM模型,通过两次DEM模型相减即可获得该区域的沉陷盆地。由于植被点的存在,无法得到准确的DEM,因此,在构建DEM之前需要将植被点剔除。
本文采用Trimble GX200三维激光扫描仪对某矿区沉陷盆地进行2次扫描,由于该区域地下正在进行开采,地表沉陷剧烈,因此两次扫描间隔25天左右。虽然沉陷盆地范围较大,但为了获得准确的下沉信息,采用较高的采用密度,采样间隔为50mm,最终得到两期沉陷盆地点云数据,如图4所示。
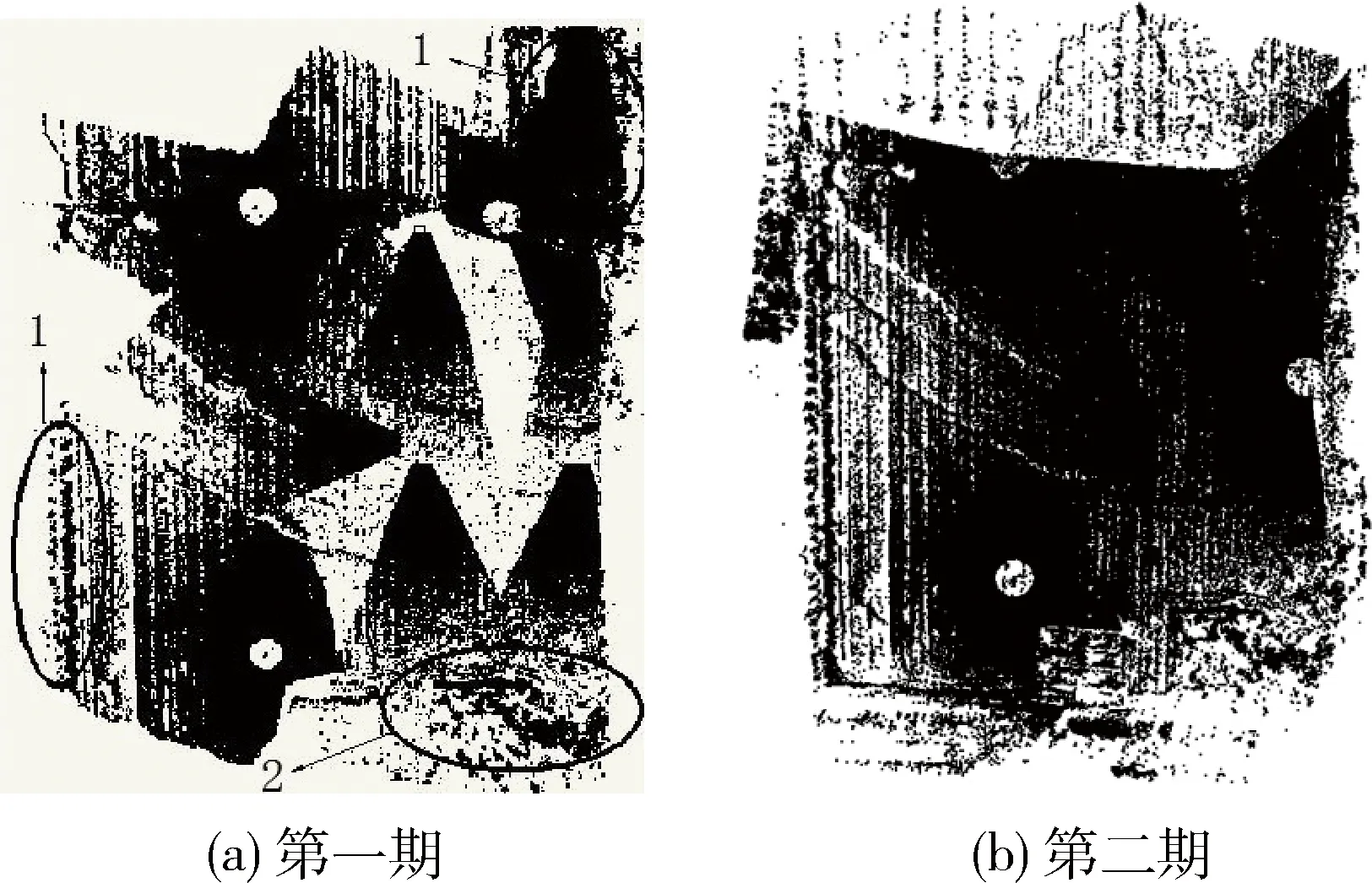
图4沉陷盆地点云数据
2.1植被剔除
其中图4(a)中椭圆所圈部分,1处有大量行树,2处有低矮的树木和密集杂草等植被,其他区域的植被点则较分散。由于该区域杂草比较低矮,如果邻域点选取过多,则不易识别,因此k取100。通过对植被样本点的实验,阈值λ设置为0.35时植被的滤波效果较好。

图5点云示意图
如图5(b)、图5(d)所示,经过滤波处理后,绝大多数的密集杂草及树木点已经被剔除,只剩余少部分树干点和噪点,本文算法无法有效识别这些点。通过分析发现,这些点是由少量噪声点及局部区域接近平面的树干点组成,这些点可采用基于地形坡度阈值的方法剔除[5]。为了验证本文算法的优越性,将本文算法的提取效果与基于地形坡度阈值的滤波方法进行对比,图5(e)为基于地形坡度的植被点云滤波结果,由于该方法需以地面点为基础进行滤波,因此在该植被密集且地面点很少的区域,植被剔除效果较差。
2.2沉陷盆地的生成
获取下沉盆地之前,要以地下开采前后采集的扫描点云数据建立高精度的地表格网模型。如图6所示,根据原始扫描点云数据得到该沉陷区的DEM,由于树木及密集植被的影响,图6(a)中1处和2处出现高程突变,生成的DEM效果很差,与实际不符,运用本文算法将树木点及密集杂草等植被点剔除,图6(b)为剔除植被点后生成的DEM,与图6(a)相比,1处和2处的植被点已被剔除,该DEM较好的表达了实际地形趋势。
建立地表格网模型后,需进行高程内插,从而获取2期沉陷盆地内相同平面位置的高程,并求取下沉值,最终得到扫描区域沉陷盆地的DEM。如图7所示,下沉盆地DEM呈现由内向外的同心圆结构,与实际的地下采煤引起的下沉盆地形态相吻合。但是由于部分树木点没有剔除干净,这部分点云计算出的下沉值会出现较大误差,如图7中小矩形框内的斑点。

图6点云生成DEM

图7地表下沉盆地
3结论
三维激光扫描仪获得沉陷区下沉盆地的点云,需进行滤波剔除地面植被,有些区域植被点密集或者由于遮挡,地面点极少,无法拟合出地形表面,这部分植被点很难剔除。本文提出基于点云均匀度的植被剔除方法,得出以下两点结论。
1)利用点云在局部空间内分布的均匀度来判别树木及低矮密集的植被点,滤波效果较好,可生成较为准确的DEM,为获取高精度的下沉盆地提供了条件。
2)但该算法对细小的树干等噪声点无法识别,需借助其它方法进行剔除,且在局部有高程突变的区域会把地面点误识别为植被点。
参考文献
[1]李亮,吴侃,刘虎,等.地面三维激光扫描地形测量数据粗差剔除算法及实现[J].测绘科学,2010,35(3):187-189.
[2]郭文兵,白二虎,陈俊杰.三维激光扫描监测开采沉陷的精度分析[J].煤炭科学技术,2014,42(11):85-89.
[3]陈冉丽,吴侃.三维激光扫描用于获取开采沉陷盆地研究[J].测绘工程,2012,21(3):187-189.67-70.
[4]严剑锋,邓喀中,邢正全.基于最小二乘拟合的三维激光扫描点云滤波[J].测绘通报,2013(5):43-46.
[5]龚亮,张永生,李正国,等.基于多尺度虚拟网格与坡度阈值的机载LiDAR点云滤波方法[J].测绘科学,2012,37(1):101-103.
[6]刘颖,张正,马恩林.关于有限集点分布均匀性的度量方法[J].首都师范大学学报:自然科学版,1997,18(3):10-14.
[7]余乐文,张达,张元生.地下采空区探测技术研究[J].中国矿业,2015,24(1):336-338.
[8]梁玉斌.面向建筑测绘的地面激光扫描模式识别方法研究[D].武汉:武汉大学,2013.
[9]胡大贺,吴侃,陈冉丽.三维激光扫描用于开采沉陷监测研究[J].煤矿开采,2013,18(1):20-22.
[10]陈晓青,任凤玉,张国建.矿山地表三维模型实时重建方法的研究[J].中国矿业,2011,20(1):104-106.
[11]胡永杰,程朋根,陈晓勇,等.机载激光雷达点云滤波算法分析与比较[J].测绘科学技术学报,2015,32(1):72-76.
The elimination of vegetation based on the uniformity of point cloud
CHEN Peng,LI Liang,HU Da-he
(1.School of Environment Science and Spatial Informatics,China University of Mining and Technology,Xuzhou 221116,China;2.Suzhou Surveying & Mapping Institute Co.,Ltd.,Suzhou 215007,China)
Abstract:Aimed at the problem of the influence on requiring mining subsidence basin precision with 3-D laser scanner conducted by vegetation point.A method of elimination of vegetation is proposed on the basis of uniformity of point cloud.Firstly,a virtual cube taking the maximum coordinate difference of the k-neighborhood of point as the length and a minimum cuboid containing the points in the virtual cube were constructed.Through comparing the volume ratio of minimum cuboid and virtual cube,we can identify vegetation point.As the result showing,this method can improve the mining subsidence basin precision better by eliminating trees and low weeds point.
Key words:3-D laser scanning;subsidence basin;uniformity;virtual cube;vegetation point
收稿日期:2015-11-07
基金项目:国家自然科学基金项目资助(编号:51504239);江苏高校优势学科建设工程项目资助(编号:SZBF2011-6-B35)
作者简介:陈朋(1991-),男,安徽淮北人,硕士研究生,主要从事大地测量与三维激光扫描数据处理方面的研究。E-mail:chenp0816@126.com。
中图分类号:P225.2
文献标识码:A
文章编号:1004-4051(2016)05-0138-03
猜你喜欢
作物研究(2023年2期)2023-05-28 13:44:14
河南畜牧兽医(2020年21期)2020-01-10 00:20:08
北京航空航天大学学报(2017年3期)2017-11-23 05:14:48
智能计算机与应用(2017年3期)2017-07-15 14:01:19
农家科技中旬版(2017年5期)2017-07-14 08:38:27
中国科技纵横(2017年3期)2017-03-29 16:01:41
科技视界(2016年4期)2016-02-22 12:45:32
纺织科技进展(2015年1期)2015-11-28 05:56:28
中国塑料(2015年9期)2015-10-14 01:12:18
绿色科技(2015年6期)2015-08-05 18:25:42