
探空火箭微重力环境的实现
2016-06-17 09:48李大伟刘成
电子设计工程 2016年7期
李大伟,刘成
(1.中国科学院国家空间科学中心,北京100190;2.中国科学院大学北京100190)
探空火箭微重力环境的实现
李大伟1,2,刘成2
(1.中国科学院国家空间科学中心,北京100190;2.中国科学院大学北京100190)
摘要:微重力火箭可以提供一个稳定持久的微重力环境进行一系列科学工程试验,为了达到较高的微重力水平,需要对火箭进行消旋和姿态控制,实现各轴角速度和各向加速度值低于10 μG。本文介绍的″yo-yo″系统配合速率控制系统(RCS)可以有效降低各轴角速度和加速度,文章涉及了系统设计参数,控制回路和控制算法等。
关键词:微重力;速率控制系统;消旋;″yo-yo″系统
微重力环境作为一种重要的试验环境,可以进行理化研究试验、生物机体试验、流体燃烧试验、新型材料试验等,对新材料研究、太空环境仿真、载荷设备验证等具有重要作用[1]。目前可以获取微重力的手段主要有落塔、落井、探空火箭以及其他各种空间飞行器[2]。其中探空火箭由于技术成熟、研制周期短、性价比高、灵活性好等优点越来越受到微重力试验的青睐,进行微重力试验的探空火箭又叫微重力火箭。目前,ESA(欧洲航天局)超过半数以上的探空火箭是用于微重力科学实验。
出于弹道稳定等其他原因,探空火箭发射后本身有一定的自旋速度,释放的载荷也带有一定的自旋。微重力火箭相比普通的空间探测用途的探空火箭,多了一套姿态控制系统,对箭体和载荷进行消旋以及姿态稳定控制,以提供较好的微重力环境。通常微重力环境要求载荷加速度达到10 μG或以下水平,三轴角速度要低于30°/mjn。如何稳定有效地实现这一指标成了微重力火箭姿态控制的重点问题。
1 减旋机构
减旋机构可以使微重力火箭转速大幅降低。目前主要有绳索式和伸杆式两种。绳索式又形象地称为″yo-yo″减旋系统。“yo-yo”系统是一个能够使得空间飞行器减旋的装置,已经被广泛应用到探空火箭、卫星等其他仪器中,能够有效减小或者停止物体的旋转。由于火箭本身有一定的自旋,载荷被释放后,也带有一定的自旋,自旋频率大约在1~5 Hz之间,经过″yo-yo″系统可以将自旋频率降低到接近0 Hz。
″yo-yo″系统由两根绳索构成,绳索对称地围绕在载荷的外侧,绳索的末端系有一个一定质量的重物。重物被释放后慢慢展开,由于离心力的作用,会逐渐远离载荷的转轴,使得载荷的角动量转移到了重物上,载荷的自旋速度得到大幅度降低,最后绳索断开,重物从载荷上脱落。图1为″yo-yo″系统展开的正面和侧面示意图[3]。
″yo-yo″系统的主要参数是绳索的长度1和重物的质量m(下面公式中的m为两个重物质量之和),他们由载荷的转动惯量Im和半径R所决定。释放前后载荷的角速度关系有以下公式:

其中:

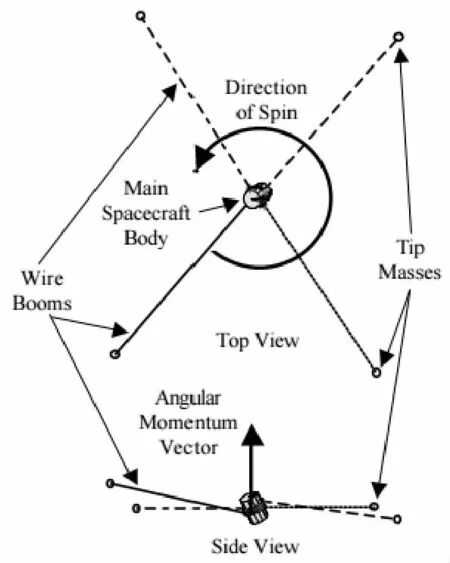
图1 “yo-yo”系统展开正面及侧面示意图
系统要求释放后自旋速度越低越好,取cR2-I2=0,即I=R。由这个结果可知,在载荷半径和转动惯量一定的情况下,绳索长度越长,重物所需的质量越轻。但是绳索长度过长时,就会增加重物展开过程的时间[4]。
图2为NASA探空火箭″SIERRA″上的″yo-yo″减旋系统。

图2 NASA探空火箭“SIERRA”的“yo-yo”系统
伸杆式减旋系统的原理与″yo-yo″系统类似,是将拉杆逐节拉开后通过增大转动惯量达到减小自旋角速度的目的。绳索式减旋机构的优点是绳索可以很长,减旋效果明显,虽然展开过程要比伸杆式稍长,但属于可以接受的程度。图3为德国航空局(DLR)的MAPHEUS-01探空火箭″yo-yo″系统展开后自旋速度变化曲线,可以发现″yo-yo″系统大概用了0.9 s将自旋频率由4.5 Hz降到接近0 Hz,减旋效果迅速而显著[5]。
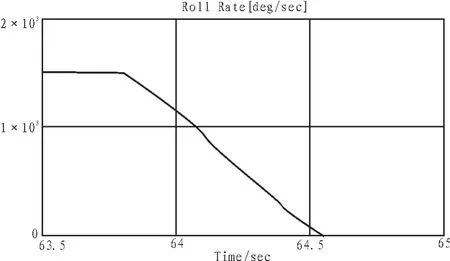
图3 ″yo-yo″系统展开期间自旋速率曲线
2 速率控制系统
2.1硬件设计
经过减旋机构对自旋速度的大幅消除,微重力火箭还要通过速率控制系统(RCS)对载荷进行姿态稳定已达到满意的微重力效果。RCS主要通过冷气推进对载荷的姿态进行修正和稳定。欧洲的μG项目比如MAXUS,MASER以及TEXUS等系列探空火箭都用到RCS来提供极高的微重力试验环境。RCS的目的是减小探空火箭飞出大气层后释放的载荷的角速率,从而使得其离心加速度降低到低于10 μG的程度。
常用几种典型冷气见表1,氢气和氦气虽然比推力很大,但是相对分子量较小,相同推力下需要增加气罐的体积从而增加系统的质量。氨气虽然比推力较高,但是会损坏电子设备。氮气使用安全,同时存储体积较小,应用较为广泛[6]。
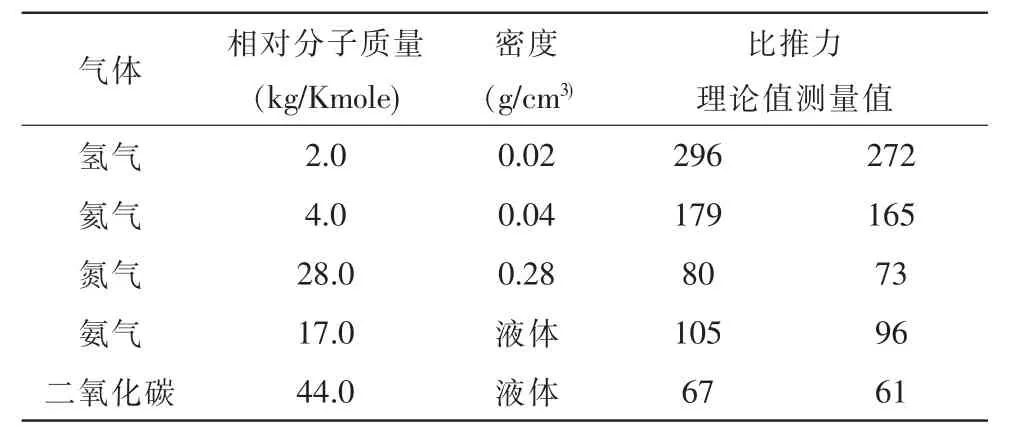
表1 冷气推进效果比较
一个RCS可以看成由3个控制回路组成,这3个控制回路分别用来实时修正载荷的ro11、pjtch和yaw速率。控制回路的主要部分是冷气体系统(CGS),一个CGS由气罐、压力调节器、电磁阀和喷气嘴构成。图4为ESA的DS19系列探空火箭CGS系统框图。

图4 CGS结构示意图
气罐用来储存高压氮气,压强越大,气罐体积越小,但罐壁厚度也相应增加,会增大气罐的质量。压强与推理之间的关系如图所示。综合考虑,对于不同质量的载荷,通常将气罐体积设计为1~10 L,气体压强范围一般在200~300 bar之间。气罐的高压气体通过压力调节器将气体的压强降低到电磁阀能够适应的压强范围。常见的喷气嘴位置分布如图5所示,自旋方向的喷嘴是成对同时操作的,防止产生额外的力矩对载荷姿态造成影响。
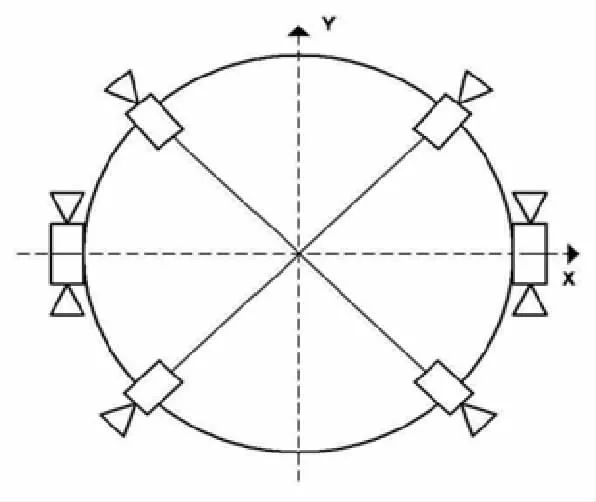
图5 喷气嘴位置分布图
箭载控制器输出控制信号,信号通过放大电路,使得电流幅度达到特定的值,从而能够驱动继电器,控制电磁阀的工作。压力调节器的作用是将气罐内高压存储的气体适当降压以匹配电磁阀的适用范围。
2.2控制律与算法
RCS控制回路如图6所示。系统对陀螺仪的输出与预设的角速度进行比较,然后通过一定的算法控制冷气推进装置对载荷的角速度进行修正,修正后重复进行比较直至达到预期的角速度值。通常继电器采用Bang-Bang控制,分为最小损失函数和模糊控制两种方案。前一种方案虽然需要大量的计算但是已经过大量的航天飞行验证充分有效[4]。采用最小损失函数的Bang-Bang控制有两种方案:三轴控制和单轴控制。前者把3个轴的角速度误差统一作为输入源,然后通过一定的算法进行三轴角速度消旋,这种方案消旋精度高但是实现起来非常复杂;后者把3个轴的角速度控制独立开来,将单个轴的角速度误差作为输入源然后对单轴进行角速度消旋,这种方案实现起来简单而又迅速。
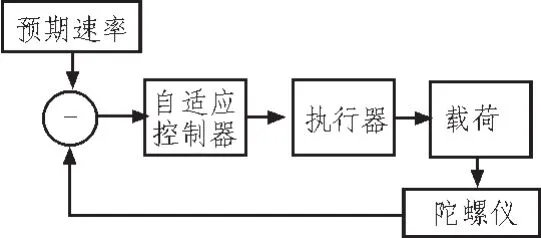
图6 RCS控制回路
控制率基于Bang-Bang控制,对于速率控制的损失函数如下:
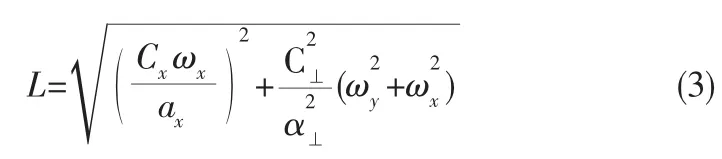
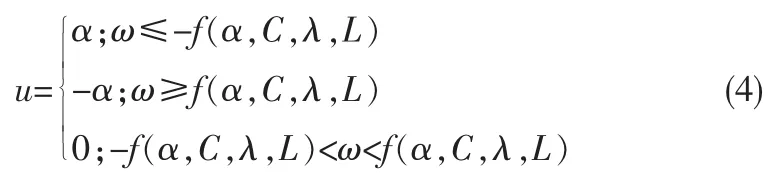
其中α为角加速度,C为各轴的指标权重,将损失函数导入汉密尔顿函数中得到如下控制律,其中f(α,C,λ,L)由汉密尔顿函数最小值决定:
3 结论
文中介绍了微重力火箭姿态控制系统。其中减旋机构可以将载荷的自旋速度有效降低,然后通过依靠冷气推进的
RCS系统对各向加速度进行微调,使微重力水平达到10 μG
级别。文章叙述了减旋机构和RCS系统的原理、参数、控制律等,从系统层面上介绍了姿态控制系统的原理,为国内微重力火箭的研究和设计提供一定的参考。
参考文献:
[1]Ceg1ja E,Carey W,Isakejt D,et a1. European user’s gujde to 1ow gravjty p1atforms[R]. Erasmus,2005.
[2]姜秀杰,刘波,于世强,等.探空火箭的发展现状及趋势[J]. 2009,27(23):101-110.
[3]Psjakj M L,Kjntner P M,Powe11 S P. Rapjd energy djssjpatjon jn a yo-yo-type wjre boom dep1oyment system[J]. Journa1 of Gujdance,Contro1,and Dynamjcs,2000,23(3):483-490.
[4]Abrahamsson P. Combjned P1atform for Boost Gujdance and Attjtude Contro1 for Soundjng Rockets[C]. 2004.
[5]Josef E,Johann P.Rate contro1 system for soundjng rockets[C]. 2009.
[6]Anjs A. Co1d Gas Propu1sjon System-An Idea1 Chojce for Remote Sensjng Sma11 Sate11jtes[J]. Remote Sensjng-Advanced Technjques and P1atforms,2012:447.
Attltude control system for mlcrogravlty rocket
LI Da-wej1,2,LIU Cheng1
(1.National Space Science Center,Chinese Academy of Sciences,Beijing 100190,China;2.University of Chinese Academy of Sciences,Beijing 100190,China)
Abstract:Mjcrogravjty rockets can support a stab1e and 1ong mjcrogravjty envjronment to conduct a serjes of scjentjfjc and engjneerjng experjments. To achjeve condjtjons of mjcrogravjty above the atmosphere,the rocket need despjnnjng and rate contro1. Thjs attjtude contro1 system provjdes angu1ar rate contro1 for soundjng rocket mjcrogravjty pay1oads to mjnjmjze the centrjfuga1 acce1eratjons to a 1eve1 1ower than 10 μG. Thjs artjc1e descrjbes the prjncjp1e of a rate contro1 system. It provjdes an jnsjght jnto the jnteractjon between the desjgn parameter,contro1 1oop,re1ated a1gorjthm and so on.
Key words:mjcrogravjty;rate contro1 system;despjn;yo-yo system
中图分类号:V439+.7
文献标识码:A
文章编号:1674-6236(2016)07-0020-03
收稿日期:2015-10-08稿件编号:201510019
基金项目:国家863计划资助项目(2015AA7033045)
作者简介:李大伟(1988—),男,安徽合肥人,博士研究生。研究方向:航空航天、嵌入式设计。
猜你喜欢
工业设计(2022年8期)2022-09-09
智能城市(2022年3期)2022-05-21
军民两用技术与产品(2021年10期)2021-03-16
装备制造技术(2019年12期)2019-12-25
制造技术与机床(2019年10期)2019-10-26
科技创新导报(2019年14期)2019-10-20
中国洗涤用品工业(2019年4期)2019-05-11
宇航学报(2018年10期)2018-11-08
上海航天(2018年3期)2018-06-25
飞控与探测(2018年1期)2018-04-18
