基于光伏系统负载变化的一种模糊MPPT方法
2016-06-12 07:49:22李绍武马晓红田栋文
湖北民族大学学报(自然科学版) 2016年1期
关键词:模糊控制
李绍武,马晓红,龙 洋,徐 超,田栋文
(1.湖北民族学院科技学院 信息工程系,湖北 恩施 445000;2.湖北民族学院科技学院 经济与管理系,湖北 恩施 445000)
基于光伏系统负载变化的一种模糊MPPT方法
李绍武1,马晓红2,龙洋1,徐超1,田栋文1
(1.湖北民族学院科技学院 信息工程系,湖北 恩施 445000;2.湖北民族学院科技学院 经济与管理系,湖北 恩施 445000)
摘要:在负载快速变化时,为了保证光伏(photovoltaic,简称PV)系统获得较好的最大功率跟踪(maximum power point tracking,简称MPPT)速度,提出了一种基于负载变化的MPPT控制方法.该方法中,将负载的变化量作为了模糊控制器的输入信号,以提高寻优步长对负载变化的自适应能力.最后仿真实验表明:在负载快速变化的情况下,该模糊控制方法具有比传统扰动观察法更好的MPPT暂态性能.
关键词:光伏系统;MPPT;模糊控制
采用MPPT控制技术是提高光伏系统能源利用效率的最有效手段之一.传统的MPPT控制方法中,以恒定电压法[1]、扰动观察法[2]、电导增量法[3]、智能控制法[4-6]、可变天气参数法[7]等为主.而它们中,又以扰动观察法和模糊控制法[8-13]的实际应用最广.本文以传统模糊控制方法为基础,针对光伏系统负载多变的情况进行专门设计,提出一种基于负载变化的模糊MPPT控制方法.而且仿真实验证实:该模糊控制方法具有比传统扰动观察法更好的MPPT快速性性能.

图1 具有MPPT功能的光伏系统结构图Fig.1 Configuration diagram of PV system with MPPT function
1负载变化时的光伏系统MPPT分析
1.1具有MPPT功能的光伏系统结构
基于MPPT控制的光伏系统典型结构如图1所示[14].此时,采用基本Buck型DC/DC转换器实现MPPT功能.图1中V、I、V0和I0分别表示DC/DC转换器的输入电压、输入电流、输出电压和输出电流;S、L、D分别表示半导体开关管、电感和快恢复二级管;C1和C2均表示电解电容;RL表示负载或者等效负载;PWM表示控制开关管的脉宽调制信号,其占空比用D表示;另外图1中虚线表示采样信号和控制信号.
对于图1所示的光伏系统,MPPT控制器的主要功能是实现光伏系统的模糊MPPT控制,其输入信号为输出电压值V0和输出电流值I0的检测值.当负载快速变化时,可以通过这些输入信号计算负载(或等效负载)RL和计算实时输出功率P0,它们则作为模糊控制的两个输入信号.
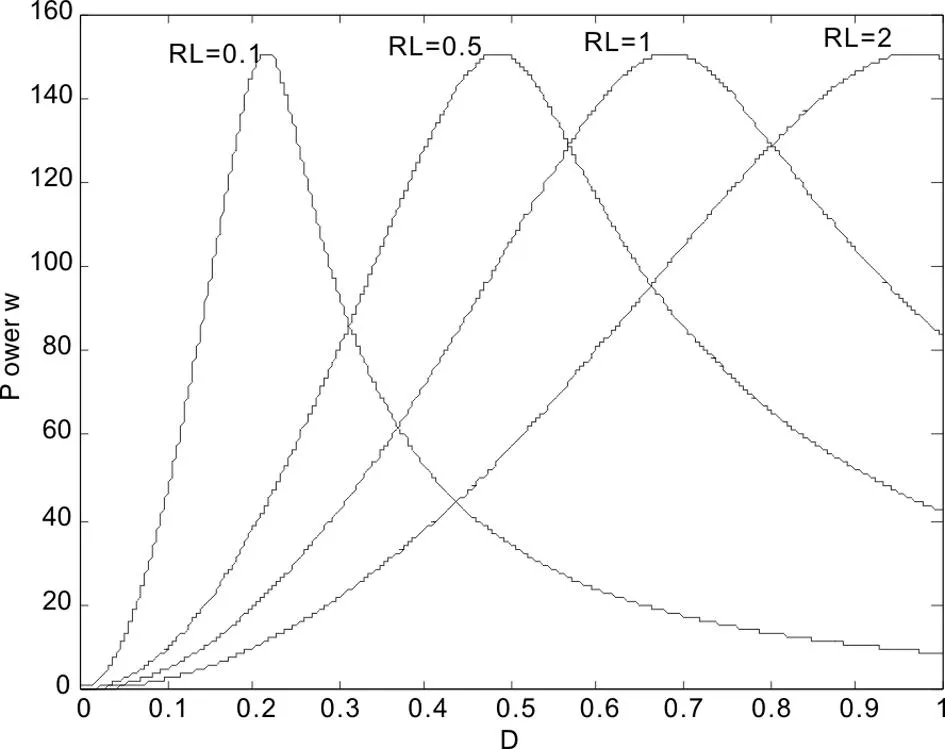
图2 负载变化对光伏系统Po-D曲线的影响Fig.2 Effect of variable load to Po-D curve of PV system

ΔDΔP0PBPZPSZENSNZNBΔRLPBPBPBPBPBPZPSZEPZPBPBPBPZPSZENSPSPBPBPZPSZENSNZZEPBPZPSZENSNZNBNSPZPSZENSNZNBNBNZPSZENSNZNBNBNBNBZENSNZNBNBNBNB
1.2负载变化对MPPT控制的影响
在将RL值作为模糊控制器的输入信号前,必须研究控制信号随RL变化的规律,以便制定相应的控制对策.这里,在理想情况下采用Matlab仿真软件绘制光伏系统的输出功率-占空比曲线(P0-D曲线)如图2所示,其中图2显示的是标准测试条件(太阳辐照度为1 000W/m2,温度25℃)下光伏系统在RL分别取0.1、0.5、1和2 Ω时的P0-D变化曲线;光伏电池采用“四参数”模型[15]且4个参数分别取Im=8.58 A、Isc=6.18 A、Vm=17.5 V和Voc=22V.
从图2可以看出:在理想情况下,输出功率值始终保持在150 W左右不变,即理想情况下的输出功率值不受负载变化的影响;当采用Buck电路实现MPPT功能时,最大功率点(简称MPP)处的占空比Dmax会随着负载RL值的增加而增加,或者随着负载RL值的减小而减小;Dmax的变化量与负载的变化量有关.
2模糊控制器的设计
采用图1所示的光伏系统实现模糊MPPT控制时,模糊控制器的输入量设计为输出功率的变化量ΔP0和负载变化量ΔRL,输出量设计为PWM波占空比的变化量ΔD.这里,采用Matlab软件的专用设计工具实现模糊控制器的整个设计,设计过程中的各种参数设置分别如图3~6所示,而模糊控制规则如表1所示,其中图3~4分别表示模糊控制器的输入变量和输出变量的隶属度函数曲线;图5和图6分别表示模糊控制器的控制规则和参数设置.

图3 ΔPo的隶属度函数 图4 ΔRL的隶属度函数 图5 ΔD的隶属度函数曲线 图6 模糊控制器的参数设置
从模糊控制器的整个设计过程可以看出:第一,模糊控制器仍然采用最简单结构以减少设计周期并降低硬件成本;第二,光伏系统的负载变化量作为模糊控制器的输入参数以极大程度地提高负载快速变化时最大功率跟踪步长的自适应能力.
3仿真实验
搭建图1所示的光伏系统进行实验,以对比光伏系统分别采用本文所提模糊控制法和传统扰动观察法时的MPPT性能.实验中假设负载按图7所示规律变化,此时两种MPPT方法的输出功率曲线如图8所示.实验中,光伏电池参数取值与1.2节相同;Buck电路中,MOSFET管、快恢复二极管、线性电感(取1.2 mH)和电解电容(取2 200 μF)均为理想元器件;扰动观察法的MPPT步长假设为0.003.
从图8可以看出:采用本文提出的模糊控制法时,输出功率在三个时间段的调节时间分别是86、47和30 ms;相比之下,采用传统扰动观察法时分别为143、89和57 ms.对比实验结果可以得出结论:在负载快速变化时,本文提出的模糊控制法有比扰动观察法更好的MPPT自适应性能.
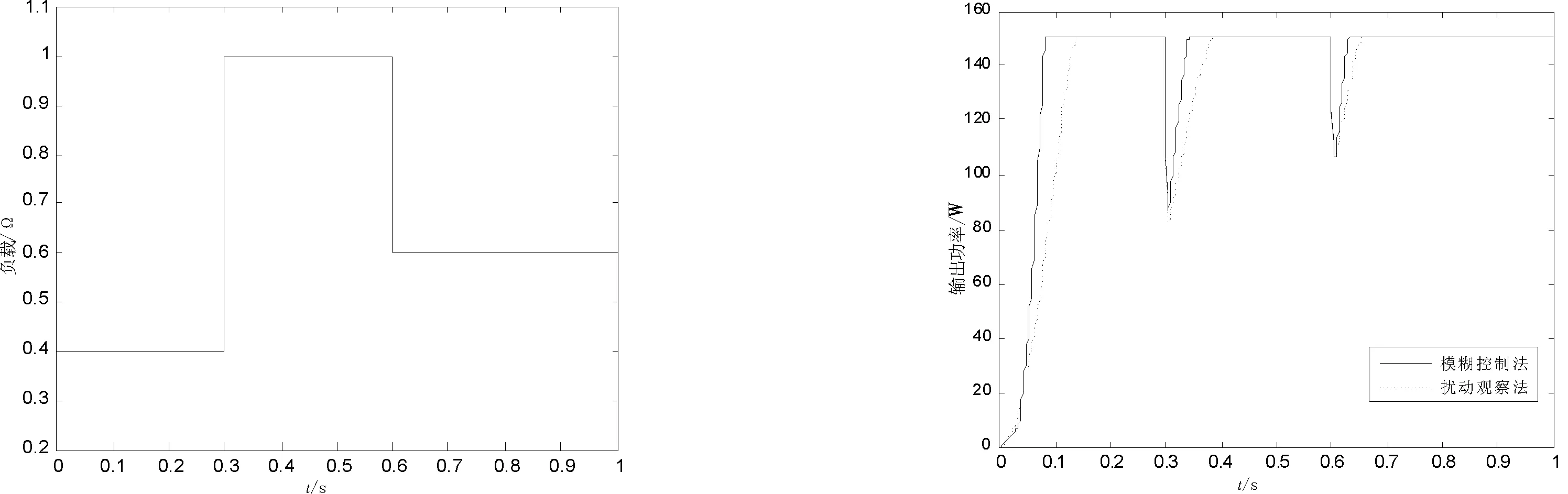
图7 仿真实验中的负载变化曲线 图8 两种MPPT方法的输出功率对比曲线Fig.7 Changing load curves in the simulation experiment Fig.8 Output power curves of two MPPT methods
4结论
本文针对光伏系统负载快速变化的情况,提出了一种模糊MPPT控制方法.该方法在传统模糊控制器的基础上增加了负载变化量为输入信号,提高了负载变化时最大功率跟踪步长的自适应能力.最后通过仿真实验证实:本文所提MPPT方法有比传统扰动观察法更好的MPPT暂态性能.
参考文献:
[1]PARIMITA Mohanty,BHUVANESWARI G,BALASUBRAMANIAN R,et al. MATLAB based modeling to study the performance of different MPPT techniques used for solar PV system under various operating conditions [J].Renewable and Sustainable Energy Reviews,2014,38:581-593.
[2]LIU Yali,LI Ming,JI Xu,et al.A comparative study of the maximum power point tracking methods for PV systems [J].Energy Conversion and Management,2014,85:809-816.
[3]KASHIF Ishaque,ZAINAL Salam,GEORGE Lauss. The performance of perturb and observe and incremental conductance maximum power point tracking method under dynamic weather conditions [J].Applied Energy,2014,119:228-236.
[4]ADEL Mellit,Soteris A,Kalogirou.MPPT-based artificial intelligence techniques for photovoltaic systems and its implementation into field programmable gate array chips: review of current status and future perspectives [J].Energy,2014,70:1-21.
[5]王归新,刘小娟,杨世凯,等.直流微电网能量管理控制系统的研究[J].三峡大学学报(自然科学版),2015,37(4):77-81.
[6]邹莉.板料拉深成形液压机边力智能控制系统的实现[J].云南民族大学学报(自然科学版),2013,22(3):230-234.
[7]LI Shaowu,ATTOU Amine,YANG Yongchao,et al.A maximum power point tracking control strategy with variable weather parameters for photovoltaic systems with DC bus [J].Renewable Energy,2015,74:478-488.
[8]李绍武,张昌华,陈坤燚,等.光伏系统的一种模糊MPPT控制方法[J].湖北民族学院学报(自然科学版),2014,32(3):318-321.
[9]徐峰.一种基于模糊控制的光伏发电系统的MPPT控制[J].电源技术,2014,138(1):92-96.
[10]连瑞娜,熊和金.光伏发电MPPT的灰色模糊PID控制[J].三峡大学学报(自然科学版),2011,33(1):33-36.
[11]宋荣荣,马卫华.模糊PID控制在磁悬浮系统中的应用[J].西南民族大学学报(自然科学版),2014,28(5):1-6.
[12]郝万君,乔焰辉,李泽,等.基于模糊型的一类不确定非线性系统协调优化控制[J].苏州科技学院学报(自然科学报),2015,32(4):40-45.
[13]龙洋,徐超,钟建伟.模糊自适应PID控制在PLC控制系统中的应用[J].湖北民族学院学报(自然科学版),2014,32(2):200-202.
[14]何道清,何涛,丁宏林.太阳能光伏发电系统原理与应用技术[M].北京:化学工业出版社,2014.
[15]MORADI M H,TOUSI S M R,NEMATI M,et al.A robust hybrid method for maximum power point tracking in photovoltaic systems [J]. Solar Energy,2013,94:266-276.
责任编辑:时凌
An MPPT Method Based on Changing Load of PV System
LI Shaowu1,MA Xiaohong2,LONG Yang1,XU Chao1,TIAN Dongwen1
(1.Department of Information Engineering,Science and Technology College of Hubei University for Nationalities,Enshi 445000,China;2.Department of Economic and Management,Science and Technology College of Hubei University for Nationalities,Enshi 445000,China)
Abstract:To improve the MPPT rapidity of PV system with the load changing,in this paper we propose,a fuzzy MPPT control method. In this method,the measured value of changing load is used as the input of the fuzzy controller to improve the adaptbility of tracking step size. Finally,a simulation experiment is conclucted and the experimental results verify that the MPPT rapidity of proposed MPPT method is better than conventional P&O method.
Key words:PV system;MPPT;fuzzy control
收稿日期:2015-11-18.
基金项目:湖北省教育厅科研指导性项目(B2015111).
作者简介:李绍武(1979- ),男(土家族),博士,讲师,主要从事新能源发电控制与优化的研究.
文章编号:1008-8423(2016)01-0054-03
DOI:10.13501/j.cnki.42-1569/n.2016.03.014
中图分类号:TM61
文献标志码:A
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
电子制作(2019年16期)2019-09-27 09:34:44
电源技术(2017年1期)2017-03-20 13:38:09
环境科技(2016年5期)2016-11-10 02:42:12
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
西北工业大学学报(2015年1期)2016-01-19 03:29:52
池州学院学报(2015年3期)2016-01-05 01:13:18
电源技术(2015年11期)2015-08-22 08:50:38