
基于can总线的工业自动化控制系统的设计
2016-06-02 03:09湖南汽车工程职业学院刘小兵
电子世界 2016年9期
湖南汽车工程职业学院 刘小兵
基于can总线的工业自动化控制系统的设计
湖南汽车工程职业学院 刘小兵
【摘要】基于工业4.0的要求本文设计了一种基于Can总线的工业控制自动化系统,给出具体的网络架构设计和Can总线节点硬件和软件设计,通过该系统可以有效的解决了企业对工业智能化控制的需求,对促进工业智能化转型具有非常重要的意义。
【关键词】工业4.0;自动化;Can总线;控制系统
本文为湖南省教育厅科学研究课题成果(课题号:14C1205)。
目前在工业生产现场,多种机电设备分布于工厂的各个厂房,绝大部分的控制功能虽然采用了相关的PLC控制器进行控制,但是由于其独立单一的控制功能,导致在进行许多控制操作过程中依然还需要依靠人工进行控制,对生产信息进行统计,各个设备之间的管理相对独立,并且一些相关的设备也无法进行通信交互实现联合控制功能,导致整个工业现场生产效率低下,成本过高。针对这一问题,本文在设计的基于can总线的工业自动化控制系统过程中主要解决控制功能、多机监控功能、协同控制功能等问题。
1 基于Can总线的工业控制系统网络模型设计
现场总线网络的控制网络直接面向生产过程,其对通信过程中的数据完整性、可靠性和实时性等要求非常高,是一般网络通信技术无法替代的,现所采用的现场总线一般分为设备层、中间监控层、远程监控层三层, 现场总线现场总线控制网络结构模型如图1所示。
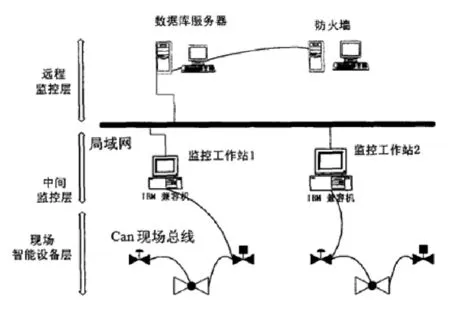
图1 现场总线现场总线控制网络结构模型
基于现场总线总线的智能设备层是整个控制网络的最底层,其主要是按照现场总线协议标准进行相关数据交换,同时完成数据的采集、AD转换和PID控制等功能,同时总线上还有PLC接口以方便与原有的系统进行连接,中间监控层主要从现场设备中获取相关的数据,进而完成对各种设备的数据分析和控制功能,实现对各种现场智能设备监控,其通过扩展槽中的网络接口板与现场总线总线进行连接,对整个现场总线总线网络中的各种设备通信数据进行协调。远程监控层主要是基于以太网等通信方式,从中间监控层获取相关的现场智能设备的信息数据,然后对其进行集中管理与监控。
2 Can节点设计实现
Can总线的工业自动化控制系统的节点进行设计。首先,在硬件上根据系统需求分析,本文设计的Can总线的节点的原理结构如图2所示。整个Can总线节点硬件由输入键盘、输出液晶显示屏、PCA82C250接口芯片、SJA1000串口转换芯片和AT89C52控制器等组成。
基于上述控制系统的硬件设计方案,还需要在主控器AT89C52单片机上编写控制软件,协调各个控制元件进行工作,完成整个Can总线通信功能,其中整个程序主要包括发送和接受两个核心部分,系统的接收与发送程序流程如图3所示,在接收过程中,主要是采用终端方式进行接收,同时在接收过程中还要对总线的脱离、错误和报警等信息进行检测并进入相应的处理程序,发送的过程中只需要将发送的数据按照Can控制器SJA1000的格式输入到控制器的缓冲区然后触发发送。
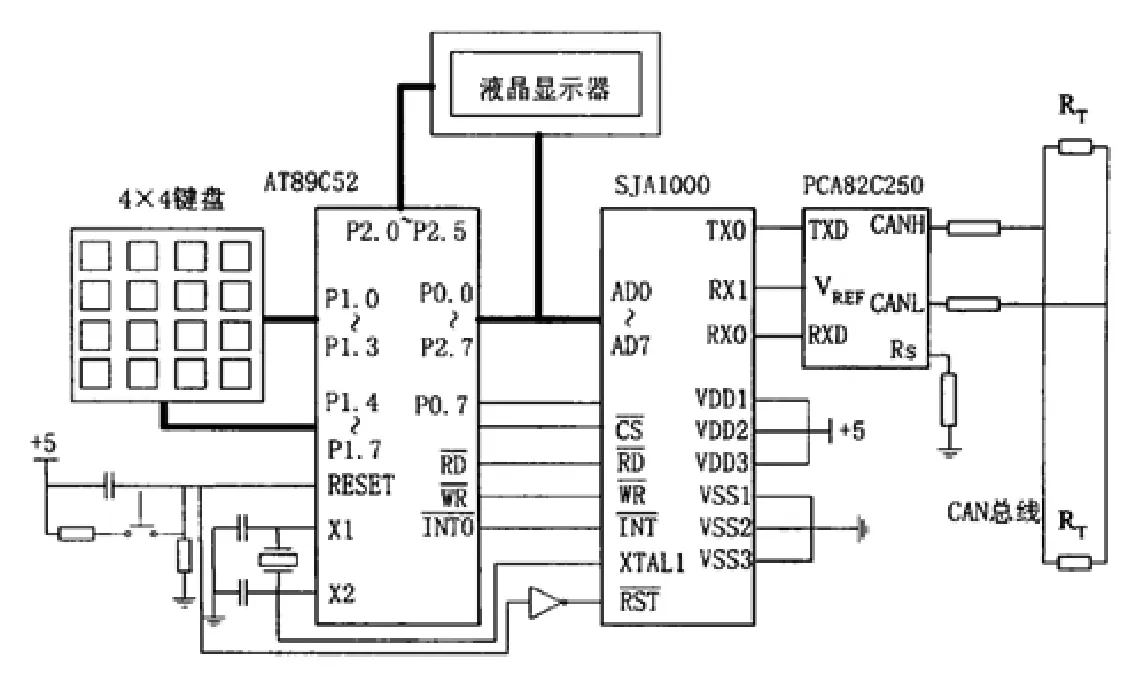
图2 Can总线节点的硬件结构原理图
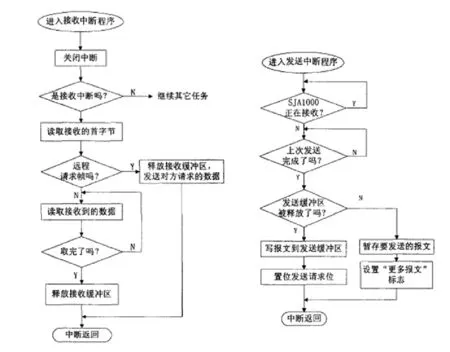
图3 Can总线节点的发送程序
3 实验分析
基于上述系统设计原理,本文基于Can控制系统的网络拓扑结构搭建了Can总线仿真测试平台,同时通过在上位机上运行canAnalyser分析软件对本文设计的Can总线节点模块进行仿真测试,本文在测试分析过程中通过在上位机上的canAnalyser平台上编写脚本宿主,进行图形化数据发送和接受测试,本文在设计过程中主要是通过在IXXAT.MbsAnalyer.dll脚本下进行编写测试程序,通过canAnalyser平台多次模拟Can报文启动和停止Can节点接收器数据进行分析,其结果如图4所示。
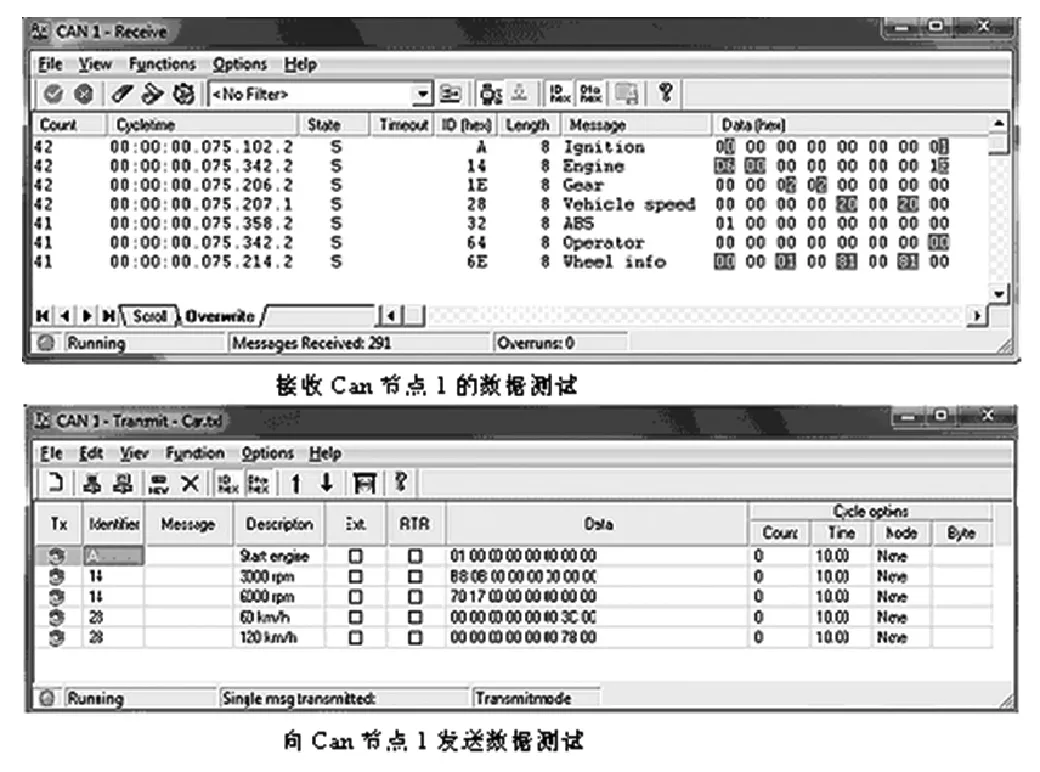
图4 接收与发送的数据测试
通过测试分析得出本文设计的Can总线通信系统可以正确稳定的进行Can总线通信,收发数据的误码率为0,同时最后通过实验模拟测试分析,本文设计的Can总线网络具有很好的负载能力,可以适应复杂的通信环境,对提升Can总线网络稳定性和可靠性具有非常重要的意义。
4 结语
本文通过对现有的现场控制系统的不足进行分析,提出了基于Can总线的工业自动化控制系统的设计,首先分析了Can总线的基本原理,结合企业工厂现场总线设计网络架构,完成了基于Can总线的工厂现场总线系统的设计,同时对系统中的硬件实现和软件实现进行了设计,给出了具体的硬件实现效果图和核心软件实现流程图,通过该系统可以有效的利用Can总线的优势提高工业控制系统的、实时性、稳定性和可靠性,对促进我国工业控制技术发展具有非常重要意义。
参考文献
[1]王贵建.基于CAN总线的分布式发动机控制系统设计[D].哈尔滨工程大学,2006.
[2]谭啸天.基于WinCC和CAN总线的煤矿车辆发动机控制系统的设计与实现[J].煤矿机械,2014,01﹕182-184.
[3]于清澄.基于现场总线技术的工业控制系统研究[J].价值工程,2014,01﹕68-69.
[4]孙玉胜,薛贺杰.基于DSP和CAN总线的多电机控制系统冗余设计[J].组合机床与自动化加工技术,2014,03﹕104-106+110.
[5]郝寿朋,刘瑞玲.基于CAN总线的数据采集与控制系统设计[J].现代电子技术,2011,08﹕36-38+42.
[6]齐翠巧.基于嵌入式CAN总线的远程工业监控系统设计[J].自动化技术与应用,2011,06﹕80-82.
[7]张立云,宋爱国,钱夔,熊鹏文.基于CAN总线的侦察机器人控制系统设计[J].测控技术,2013,01﹕65-68.
作者简介:
刘小兵(1981—),男,湖南攸县人,湖南大学硕士研究生,讲师,主要研究方向:微处理器控制电路设计和汽车电子控制和总线通信的研究。
猜你喜欢
疯狂英语·新读写(2021年10期)2021-12-07
新世纪智能(英语备考)(2019年4期)2019-06-26
铁道通信信号(2019年11期)2019-05-21
电子制作(2018年11期)2018-08-04
黄河之声(2018年5期)2018-05-17
Coco薇(2015年10期)2015-10-19
空间控制技术与应用(2015年2期)2015-06-05
中国当代医药(2015年17期)2015-03-01
舰船科学技术(2015年8期)2015-02-27
汽车维护与修理(2014年10期)2014-02-28
