新型固态化激光雷达技术综述
2016-05-30 17:38:05刘博洋梁洪峰
科技创新导报 2016年13期
关键词:激光雷达
刘博洋 梁洪峰

摘 要:该文从非机械扫描以及无扫描两个方面,对新型固态化激光雷达技术进行了详细介绍,并从各项技术所采用的技术手段以及解決的技术问题等多个方面进行了比较分析。以供该领域从业人员进行参考,并为专利审查员了解该领域的现有技术提供帮助,以服务审查。
关键词:激光雷达 固态化 非机械扫描 无扫描
中图分类号:TN95 文献标识码:A 文章编号:1674-098X(2016)05(a)-0064-04
激光雷达是一项传统的技术,随着无人车、无人机、机器人行业的发展,出现了应用于上述领域的新的技术问题,并产生了相关新的技术和产品。其目前被认为是行走机器人(包括无人车、无人机)的核心感知部件,同时也是行走机器人智能感知技术的最可行的解决方案,因此新型激光雷达(LiDAR)技术受到各方关注,成为资本市场追逐的重要目标。
1 传统机械扫描式激光雷达的缺陷
传统的机械扫描式激光雷达虽然成本相对较低,结构简单,但是存在较多缺陷,特别是基于车载方式的激光雷达,存在如下缺点。
(1)结构笨重,马达和多面体棱镜重量和体积较大,容易造成机械磨损,不利于长时间运转使用,扫描速度慢。
(2)光通过每一个多棱镜的表面时,都会经历一段较短的不能接受光信号的时间,降低反射信号接收比,使得最大信号接收比一般低于70%。
(3)出于安全问题考虑,一般会使用对眼睛安全的波长,但为了减少色散度,光窗数值孔径一般较小。
为了解决机械扫描式激光雷达存在较多局限的问题,近年来应用于行走机器人的新型激光雷达开始出现固态化、小型化和低成本的趋势。而固态化技术无疑是新型激光雷达发展的重要方向。
2 新型激光雷达固态化技术
该文所指的固态化,主要与机械扫描式激光雷达相区别,指内部无机械旋转部件的新型激光雷达。固态化技术又可以大体分为非机械扫描和非扫描两种方式。
2.1 非机械扫描
非机械扫描最常用的是光学相控阵激光雷达,美国Quanergy公司的S3雷达即属于此类固态化激光雷达①。光学相控阵激光雷达按光学相控的具体方式,又可进一步细分为电光扫描和声光扫描,目前多以电光扫描为主,且主要集中在相控阵扫描元件设计和改进上,大体上有以下几个主要方向。
2.1.1 光波导阵列
光波导阵列通过加电方式来实现光束扫描,利用光波导电光效应,对波导芯层加载电压,使每个波导芯层具有不同的附加折射率,波束得以在波导阵元输出截面光场具有不同的附加相位差,相位差按一定规律分布可引起输出光速的偏转。通过相位差按照一定规律分布输出,从而实现光束的扫描②。
利用电光效应实现光速扫描的技术除了基于光波导阵列的,还存在铌酸锂晶体、PLZT压电陶瓷、液晶等方式,如表1所示不同光学相控阵方式特点比较。
2.1.2 基于铁电畴工程的电光扫描器
铁电体呈自发极化,且极化方向能随外电场方向改变,铁电体自发极化方向不相同,但在一个小区域内,各晶胞自发极化方向相同,这个小区域就称为铁电畴。基于铁电畴工程的电光扫描器具有扫描速度快、精度高、没有机械运动和集成度高的优点,可以实现二维扫描,很适合高精度的空间通信和跟瞄使用,但现有的器件大多为单光束偏转设计,通光口径小,难以制作出大孔径的扫描器。
2.1.3 光纤光栅
采用双色光在双掺杂铌酸锂晶体中记录非挥发局域体光栅,具有高衍射效率、低散射噪声和实时处理的光折变体光栅固定方案。选取双掺杂LiNbO3:Ce:Cu晶体、LiNbO3:Ce:Mn晶体或LiNbO3:Fe:Mn晶体作体全息光栅,并采用双中心光固定全息记录法③。
具体方式为:如图1所示,电光控制二维激光光束扫描阵列由控制阵列和发射矩阵两部分组成,控制阵列采用10个铌酸锂晶体电光开关单元串联结构(编号100~109),每个单元可以在电场控制下对光束方向的90°偏转,从而实现分束和定向传输。发射阵列为10×10的电光开关矩阵结构(编号200~299),每个电光开关单元的信号光束的定向发射在电场的作用下实现。以上的控制阵列和发射阵列组合构成了10+10×10的铌酸锂电光开关阵列结构,电光开关设计采用光折变体全息光栅电光开关。当光信号沿-x方向入射进入扫描阵列,入射光沿控制阵列中晶体的光轴方向传输,如果对其中某一个单元,例如105号,施加半波电压,则体光栅可以对入射光产生衍射,衍射光相对于原入射光方向偏转90°后进入发射阵列,在发射阵列中依然沿电光开关单元250~259的光轴方向传输,如果对其中某一个单元,例如255号,施加半波电压,则该单元的体光栅对入射光产生衍射,衍射光在255号单元沿z轴方向出射,以一定的发射角在自由空间传输。同一列中每个光开关单元的发射角度是唯一确定的,通过改变出射面θ倾角的设置,实现不同的光束出射角度,得以灵活地改变扫描范围。
2.1.4 液晶材料
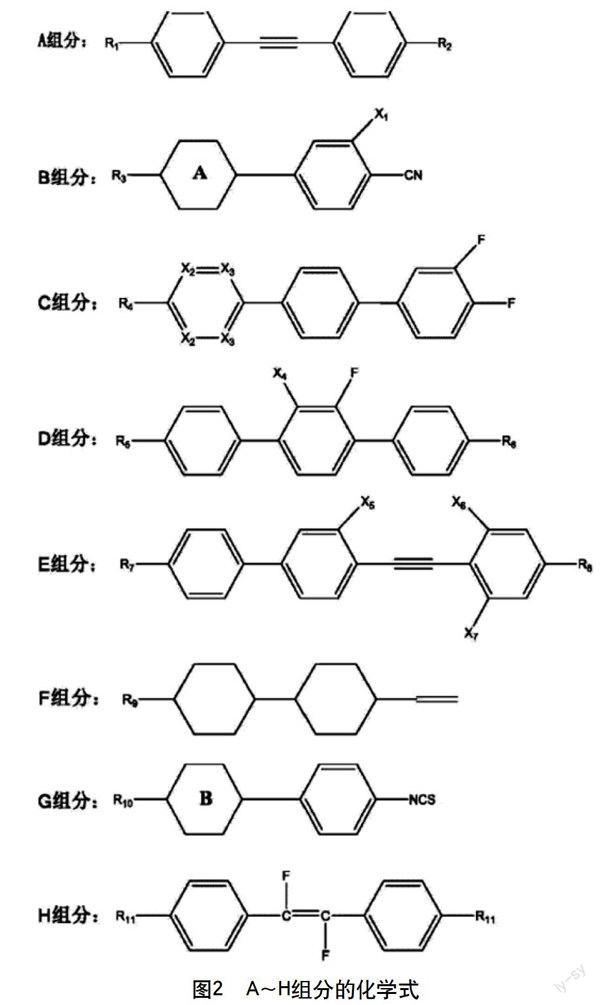
液晶双折射率较大,驱动电压低,器件厚度可比电光晶体或电光陶瓷显著减薄,可以降低电场边缘效应和光衍射并且较为方便地形成光束的二维扫描。因此,高双折射率液晶为基础的光相控阵也成为近些年来的研究热点。一种材料构成是:超高双折射率的向列相液晶材料,其按质量百分比,由具有较宽向列相范围、较低熔点的二苯乙炔类衍生物的混合物A组分(含量25%~35%),具有较高双折率的苯氰类化合物B组分(含量12%~18%),具有高双折率且极性较大的嘧啶类化合物C组分(含量2%~8%),清亮点较高侧基含氟的三联苯类化合物D组分(含量5%~10%),具有高双折射率且侧基含氟的乙炔基联苯类化合物E组分(含量30%~40%),粘度低的双环己烷类化合物F组分(含量1%~5%),具有超高双折射率的异硫氰基苯类化合物G组分(含量2%~8%)以及二氟乙烯类化合物H组份(含量1%~5%)组成,以上各个组分的质量百分比之和为100%。该液晶为混合物,由多种具有不同分子结构的化合物混配得到,具有超高双折射率、相对较低的粘度、较大的介电各向异性以及较宽的使用温度范围。其中,A~H组分的化学式如图2④。
图2中,R1~R11为饱和烷基-CnH2n+1、饱和烷氧基-OCnH2n+1或末端为烯键的烷基链-CnH2nCH=CH2;X1~X7为H、F和N中的一种;A、B为下列基团中的一种:
2.2 无扫描或非扫描
无扫描(亦称非扫描)三维成像光雷达有着探测视场大、成像速度快、探测距离远、分辨率高等优点。现阶段的无扫描三维成像光雷达技术有着两类不同的实现方案:一类是利用三维成像传感器件直接获取目标的三维图像;另一类是利用二维成像传感器件通过强度像与距离像合成的方法来获得目标的三维图像。具体实现上主要包括以下几种方法。
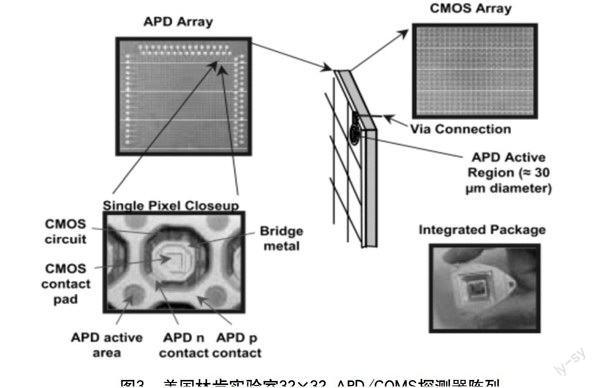
(1)基于面阵焦平面探测器的无扫描直接飞行时间测距法的三维成像激光雷达。该探测器将高精度的时间差测量电路集成到每个探测像元的后面,探测器的每个像元作为一个独立的探测器,可单独输出信号,后续电路可测量从激光发射到接收到激光回波的时间差,反演出每个像素对应的距离信息,因此,只需发射一个激光脉冲,便可获得被激光照射物体的整幅三维图像,成像速度快。代表性的是FLASH激光成像雷达,其关键技术是FLASH传感器的研制。目前国外已经开发出较大面阵的具有时间测量能力的雪崩二极管阵列(APD)面阵探测器和盖革模式的雪崩二极管阵列(GM-APD)面阵探测器,如图3所示,由于这种高灵敏度的大面阵探测器制作工艺复杂,成像分辨率低,且目前国内对该种器件的研究正处于实验样品研制阶段,无成品供应。
(2)基于专用调制解调面阵探测器的无扫描间接飞行时间测距法的三维成像激光雷达。器件与普通图像传感器的区别:一是具有高速快门,能达到10 ns级曝光速度;二是具有曝光累积功能,能将连续多次曝光产生的信号累积。测距方法上采用基于余弦波-方波鉴相法的间接飞行时间测距法,在光子混频探测器后续的计算电路中直接计算出各像素对应的入射光的相位、幅值和偏移值,从而计算出各点的距离和灰度值,得到深度图和灰度图。目前国外已经开发出相对成熟的调制解调面阵探测器,但是该探测器积分时间短、探测灵敏度低,因此成像距离只有十几米,无法实现长距离的三维成像。
(3)基于ICCD的无扫描间接飞行时间测距法的三维成像激光雷达。最初的无扫描三维成像技术都基于ICCD传感器,对光源和像增强器增益进行余弦波、方波或三角波等波形调制,按照间接飞行时间测距理论,实现三维信息测量。这一技术的代表性研究机构有美国桑迪亚国家实验室和日本广播公司。国内也有少量的研究机构开展过这方面的研究。由于ICCD帧频低、光源能量利用率低,该成像技术同样具有成像速度低,作用距离近等缺点。
谷歌公司在其一篇专利“用于使用激光点云进行物体检测的方法和系统”中⑤提及的“3D选通观察激光雷达”(3D gated viewing laser radar)是非扫描激光测距系统的示例,该篇专利采用了脉冲激光器和快速门控相机(fast gated camera)。使用CMOS(互补金属氧化物半导体)和混合CMOS/CCD(电荷耦合器件)制造技术建立在单个芯片上的高速检测器阵列和调制敏感检测器阵列执行成像激光雷达。在这些设备中,通过解调制或以高速选通来对每个像素进行本地处理,使得能够处理阵列来表示来自相机的图像。使用这种技术,可以同时捕获上千个像素来创建3D点云以表示激光雷达单元所检测到的物体或场景。该“3D选通观察激光雷达”即为上述(2)或(3)中的激光雷达。
对于上述(1)~(3)中存在的问题,一种解决方式是:基于光源调制解调的ICMOS高速三维成像激光雷达,利用高速 CMOS相机高帧频和像增强器曝光时间可调制的特点,同时对光源进行光强调制,在像增强器接收端对激光回波信号进行解调,解调后的信号为低频光信号,这样激光飞行时间的时间差体现为低频光信号的相位差,高速CMOS相机对低频光信号进行采集,最后通过计算得到每个像素相位值,从而获得整个目标的三维信息⑥。
3 结语
(1)随着无人车、无人机、机器人行业的发展,产业上对于应用于以上行业的雷达有了新的需求,而新型的固态化激光雷达,可以解决传统机械扫描式激光雷达结构笨重、信号接收比低以及安全系数差的技术问题,因此是未来激光雷达的发展趋势,包括我国在内的各国从业者都已经投入到新型固态化激光雷达的研制中来。
(2)虽然我国相关领域从业人员已经意识到了激光雷达的固态化是未来的发展趋势,但是从上文对于各篇专利及期刊文献的解读中可以看出,相对于其他国家,尤其是美国,我国该项技术绝大部分掌握于各大科研院所以及高校手中,普遍处于研发试验阶段。因此,将科研成果产业化是我国研究人员亟待解决的问题。
(3)固态化激光雷达包括非机械扫描以及无扫描两条技术路線,而以美国Quanergy公司为首的激光雷达企业,已经成功研制了如S3等的非机械扫描激光雷达产品,并已经计划进入量产阶段。将两条技术路线进行对比,非机械扫描的产业化在世界范围已经走在前沿,而我国的高校及科研院所在无扫描方面有了一定的技术积累,并没有被国外拉开距离。因此,坚持走产学研一体化道路,在无扫描激光雷达这条路线上实现突破,有助于我国在该产业实现弯道超车。
参考文献
[1]PE Mcmanamon,TA Dorschner,DL Corkum,et al.Optical phased array technology[J].Proc.of the IEEE,1996,84(2):268-298.
[2]KT Gahagan,V Gopalan,QX Jia,et al.Integrated electro-optic lens/scanner in a LiTaO3 single crystal[J].Appl.Opt.,1999,38(7):1186-1190.
[3]DA Scrymgeour,Y Barad,V Gopalan,et al Large-angle electro-optic laser scanner on LiTaO3 fabricated by in situ monitoring of ferroelectric-domain micropatterning[J].App.Opt.,2001,40(34):6236-6241.
[4]R Marino,L Skelly.A Compact 3D Imaging Laser Radar System Using Gerger-mode APD Arrays:System and Measurements[C]//Proceedings of SPIT-The Intema-tional society….2003,5086:1-15.
注释
①US2015/0378241A1。
②CN205080260U。
③CN201203740Y。
④CN104140825A。
⑤CN105182358A。
⑥CN104931974A。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国交通信息化(2021年8期)2021-11-02 05:26:02
汽车观察(2021年8期)2021-09-01 10:12:41
空间科学学报(2020年6期)2020-07-21 05:36:50
甘肃科技(2020年21期)2020-04-13 00:33:38
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子测试(2018年22期)2018-12-19 05:12:08
电子制作(2018年16期)2018-09-26 03:27:00
中国交通信息化(2018年7期)2018-09-14 02:55:02
光学精密工程(2016年1期)2016-11-07 09:01:49