影响机械臂遥操作的认知功能分析
2016-05-24 07:49唐伟财陈善广
载人航天 2016年2期
关键词:认知功能
唐伟财,陈善广,2*,肖 毅
(1.中国航天员科研训练中心人因工程国防科技重点实验室,北京100094;2.中国载人航天工程办公室,北京100720)
影响机械臂遥操作的认知功能分析
唐伟财1,陈善广1,2*,肖 毅1
(1.中国航天员科研训练中心人因工程国防科技重点实验室,北京100094;2.中国载人航天工程办公室,北京100720)
摘要:研究遥操作过程涉及到的认知行为,识别影响遥操作任务绩效的认知功能,有助于建立空间遥操作的人因可靠性分析体系,并保障在轨遥操作任务顺利完成。结合国内外研究,着重分析遥操作与情境意识、空间转换、感知觉三者之间的关系,并结合具体遥操作任务剖析各项认知功能在操作过程各个阶段的影响作用;针对情境意识、空间转换、感知觉等认知功能对NASA的机械臂遥操作训练指标进行分类梳理;最后提出了未来从认知层面开展空间遥操作研究时应该注意的问题,并从视觉信息呈现、认知功能变化和人为失误预测等方向对未来遥操作研究进行展望。
关键词:遥操作;认知功能;感知觉;空间转换;情景意识
1 引言
国外针对影响机器人遥操作绩效的认知功能(环节)展开了大量研究,其中,MIT的研究是代表。MIT的MVL(Man Vehicle Laboratory)实验室在2007年开始对机械臂遥操作进行研究[1],重点是研究遥操作过程中不同认知功能对操作的影响,其中包括开展探究空间能力对遥操作绩效影响的Menchaca-Brandan实验[2],并尝试用空间能力测试结果评价遥操作绩效,以期用于航天员选拔和训练。目前MVL实验室主要关注遥操作过程中疲劳等因素造成的航天员认知功能变化、对这些变化的监控测试的有效性以及相应的缓解措施(咖啡因、蓝光等)的有效性验证[3]。
目前我国关于机械臂遥操作的研究主要停留在硬件技术发展和软件技术完善阶段,对于机械臂遥操作过程中的认知环节、认知功能、失误操作、技能绩效、评估标准等研究刚起步,相比美国、俄罗斯等国家还有很大的差距。因此,梳理与遥操作相关的认知功能及其对操作绩效产生的影响,分析各项认知功能在遥操作过程中的地位及作用,对今后从认知层面上开展机械臂遥操作研究、深入剖析机械臂遥操作认知过程有重要意义。
2 与遥操作相关的认知功能分类
人的活动通常分为三个阶段:1)感知阶段;2)识别判断、决策阶段;3)执行操作阶段。根据行为心理学的观点,可将人的行为模型表示为:SO-R(刺激-机体-反应)[21]。在机械臂遥操作任务中,这三个阶段认知活动的主要认知功能即视知觉(感知阶段)、空间转换能力(判断决策阶段)、操作能力(执行操作阶段)。除此之外,操作员对环境信息、操作过程的情景意识水平(包括注意水平)以及对操作规则的记忆能力与遥操作也是密切相关。
下面将主要介绍遥操作与操作员的感知觉、空间转换能力、情景意识水平之间的关系。
2.1 遥操作与感知觉
在实际的遥操作任务中,对机械臂的空间位置、姿态、角度的感知能力是影响操作能否顺利完成的重要因素,甚至关乎在轨飞行的安全性问题。信息的正确获取是操作者安全操作的前提。在空间遥操作中,操作者的主要信息来源是多个摄像头反馈的视频信息,信息不仅冗余且存在盲区[1, 20],航天员须从多个视频信息中筛选必要、关键信息并正确感知,这对其熟练程度、感知觉水平都提出了很高的要求。不仅如此,视频反馈信息中的深度信息缺失问题和遥操作时延问题,对航天员对机械臂所处位置、状态的正确感知会造成很大的影响。
深度距离感知,是空间遥操作中影响机械臂能否正确抓取目标、躲避障碍、避免过度对接等安全性问题的关键因素。俄罗斯在1997年发射的进步M-34飞船与和平号空间站遥对接失败,发生严重碰撞事故[4]。造成这起事故的原因除了航天员的地面训练不够以外,还有一个主要原因即航天员通过摄像头拍下的信息进行对接操作,同空间机械臂遥操作一样,视频反馈信息缺少深度方面的立体信息,使得和平号上航天员对于深度维度的相对距离的判断和相对速度的判断出现了严重的失误。M.Alejandra设计的仿真平台实验也存在两种对接失败的情形(位置偏差过大和姿态偏差过大)[5],其主要的原因就是对目标和负载的相对位置、相对角度以及相对距离的感知不够准确。
遥操作过程的时延使得操作员在操作时对机械臂信息的感知存在明显的滞后,且无法实时获取到周围环境信息的变化,增加操作员对信息感知的难度,同时也增加操作员的感知负荷[22]。
2.2 遥操作与空间转换
空间转换在遥操作中主要用于对机械臂与目标相对的位置、姿态进行判断,并决定以何种方式调节机械臂,对操作者的判断决策环节有直接的影响。空间转换能力包括对视觉信息的想象和视觉转换[6]等。与航天员执行遥操作任务密切相关的主要有观点采择(即空间定向)、心理旋转和视图空间可视化能力。空间定向能力强调从不同的角度观察物体时想象物体状态的能力,以及对视觉刺激图形各元素排列关系的理解能力,需要对自我中心的坐标系进行转换;而心理旋转能力强调在同一个坐标系内进行观察,并从意识上对对象进行操纵、转换的能力;视图空间可视化能力强调从各个角度对空间模型的认知理解,偏向于空间定向能力。
机械臂遥操作与空间转换能力的关系已成为国外的研究热点。Kozhenikov和Hegarty两位科学家通过观点采择实验(Perspective-TakingAbility,PTA)发现,虽然心理旋转和空间定向这两种空间能力相关性很大,但是作为两种不同的认知策略,这两种空间能力是可分离的,他们通过传统纸笔测试测量被试的空间定向能力时发现,目标的旋转角度超过90度时,被试倾向于使用空间定向(换位思考)的策略,即想象自己保持和目标一样的视角;而当旋转角度小于90度时,被试更倾向于使用心理旋转的方法进行决策[7]。M.Alejandra等人认为在遥操作中,心理旋转能力多用于从单个视角对机械臂或载荷的运动状态进行理解,而空间定向(换位思考)能力用于将多个视点进行整合成为一点,并从全局上对机械臂定位和进行信息获取[5]。研究发现[5]心理旋转能力越强,则机械臂遥操作所用时间越短;而空间定向能力越强,所用时间越长。原因在于采用心理旋转策略操作时,被试是以自我为中心的坐标系进行旋转,能较快的对物体进行定位并直接输入控制操作;而采用空间定向策略时,被试需要将自己想象与机械臂一个视角,再对物体进行定向,经过坐标系转换后才能进行控制,时间较长。
在遥操作过程中,相比世界坐标系(以外部视角为中心),操作者更倾向于以自我为中心的坐标系进行操作,并且操作绩效有显著提高。此外,各个摄像头反馈的视频信息之间转换的角度过大(参考坐标系夹角过大),或者与机械臂末端视频之间的偏转角度过大,会对操作绩效产生负面的影响[5]。这说明,操作者在空间遥操作过程中受到空间定向和心理旋转负荷的影响较大。
M.Alejandra[5]等人通过虚拟现实技术为空间站设计开发了一个模拟对接任务仿真平台(如图1所示),用于测试航天员在遥操作过程中的绩效和他们的空间定向能力(Perspective-Takingtest)、空间视觉化能力(PurdueSpatialVisualizationofViewstest, PSVV)和心理旋转能力(Cube-Comparisons,CC)之间的关联。结果发现心理旋转和空间知觉定向(换位思考)是航天员在遥操作过程中频繁使用的策略,两种空间能力与操作绩效有很强的正相关关系。下图所示是遥操作对接任务的三维仿真平台。
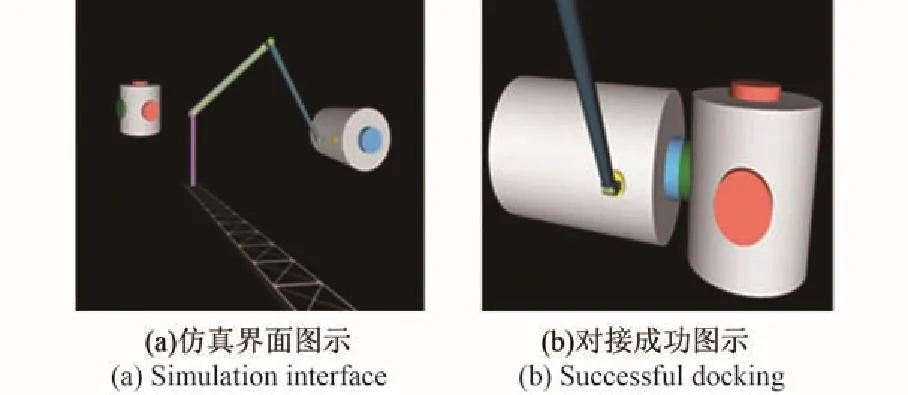
图1 模拟对接任务仿真平台[5]Fig.1 Simulated docking simulation platform[5]
心理旋转测试和空间定向能力测试又有二维测试和三维测试之分。而实际的遥操作任务,一般都是在一个三维立体的环境下进行操作,况且人在现实生活中对二维图像的认知非常熟悉,已经形成了自身的一套认知模式,所以二维的空间能力测试往往和实际的遥操作绩效没有显著性的关联。而且,被试在进行二维的空间定向能力测试时,更多使用的是心理旋转的策略,经常无法达到空间定向的测试效果。因此,往往使用三维空间定向测试范式或用空间视觉化测试范式(图2)[8]代替三维空间定向能力测试对操作者进行测试。
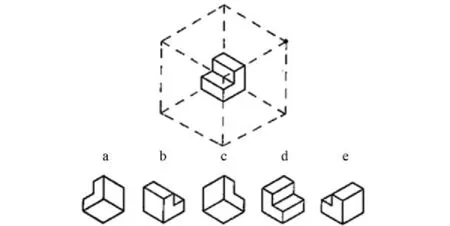
图2 PSVV测试范式[8]Fig.2 PSVV test paradigm[8]
Eyal和Tendick等人通过用旋转卡片实验、折纸实验以及PTA实验测量被试者的空间能力和腹腔镜遥操作的关系,发现这三个测试的结果和遥操作的绩效密切相关[5]。Lathan和Tracey等人通过遥操作机器人走迷宫实验也得到同样的结果,他们认为,空间感好的操作者能够更好的规划遥操作路径,从而具有更高的操作绩效水平[9]。
有研究发现,空间能力的不足可以通过其他条件的补充得以平衡。Lathan和Tracey等人通过实验发现,在操作者操作过程中加入触觉反馈,相比单纯的视觉反馈,空间能力水平高的操作者和水平低的操作者的绩效差距显著降低[9]。因此,研究遥操作各个影响因素之间的耦合关系,对于寻找提高遥操作空间技能的方法也有一定的指导作用。
2.3 遥操作与情境意识
目前,应用最为广泛的情境意识理论是Endsley的三水平模型[10],即操作者对于系统当前状态的感知、理解和未来状态的预测能力、情境意识受到操作者知识结构水平、认知能力、操作经验以及当前所处客观任务环境等多方面因素的影响,而与情境意识密切相关的脑力负荷和注意分配能力也是空间遥操作的重要影响因素[11]。Young 与Stanton认为,脑力负荷反映了操作者为了满足一定的客观和主观绩效标准而付出的注意力资源的大小,与任务需求、外部条件和个体经验有关,任务复杂度、精度要求、时间压力以及个人的操作策略、操作状态和努力程度等也会对脑力负荷产生影响[13]。对脑力负荷的评价是高风险高复杂系统中的研究重点。而注意资源分配也是完成复杂任务的重要因素,其指在同一时间内,将注意力分配到两种或两种以上的刺激或不同的活动中。注意分配水平越高,对环境的认知能力越强,相应的情景意识水平越高。
遥操作人机交互系统主要的交互行为有远程感知(remoteperception)和远程操作(remotemanipulation)两方面[15]。而远程感知除了包括人的基本信息感知能力(速度知觉、距离知觉等)以外,还包括对远程环境、远程操作状态的情境意识水平,情景意识既包括对当前状态的认识,也包括对未来状态的预测,是遥操作过程中一种必不可少的认知功能。
在复杂动态环境中,人们的决策活动高度依赖于情境意识和注意分配能力。Jennifer M.Riley等人通过对情境意识和注意分配能力的测量,对模拟排雷遥操作中不同任务难度的沉浸感进行了量化分析,实验发现遥操作任务的难度和操作者的注意分配能力两者对操作过程的沉浸感产生了显著性影响[17]。Draper在1998年指出:情境意识和注意分配对遥操作过程的沉浸感有很大影响,当操作者分配更多的资源在操作任务上时,他对操作环境的认知会更好,沉浸感会更好,操作绩效也相对更好[17]。而任务难度在一定程度上会影响操作者的情境意识水平和注意资源分配,从而影响操作的沉浸感[17]。
脑力负荷也是影响空间遥操作绩效的重要因素。有很多研究发现,由于任务难度增加造成的脑力负荷增加对遥操作的沉浸感有显著性的影响[17]。Draper认为脑力负荷的增加可能增加操作者在操作过程中的迷惑感和时间压力感,导致尝试性的、无效的操作行为增多,影响操作效率,进而又反过来增加了脑力负荷[17]。
David B.Kaber等人研究发现,时延会导致操作者的脑力负荷增加。一方面原因是时延使得任务完成的时间增加,加重操作员的体力负荷和时间压力[23];另一方面操作过程中的时延使得操作者的工作记忆负荷加重,需要对当前的状态、操作行为以及原计划即将采取的操作行为进行记忆[18]。除此之外,针对不同的机械臂控制模式,关节控制方式相比末端控制,操作者需要将每个关节的旋转转化为末端的姿态和平移的变化,脑力负荷更高。而即使采用末端控制方式,由于操作过程需要观察多个摄像头信息,每个运动摄像头获取到的信息的坐标系不同,操作者在对多个视频信息进行整合时,同样需要很强的坐标变换能力、空间转换能力,以及大脑的三维空间重构能力。操作任务的时间限制,也对操作者的脑力负载能力提出了很高的要求。
3 各认知功能在空间机械臂遥操作任务中的作用
3.1 认知任务分析
根据上述对国内外机械臂遥操作任务过程中相关的认知功能的研究结果的梳理,结合典型的机械臂遥操作任务(对接或抓取任务),将遥操作任务分为三个阶段,分别对不同的阶段进行认知任务分析(结果见表1),然后再剖析各个相关的认知功能在遥操作任务中的作用。
3.2 遥操作过程各认知功能分析
3.2.1 视知觉功能
视觉信息是机械臂遥操作的重要信息来源。对环境、位置、姿态等信息的感知对于操作前路径的规划有重要意义;而对目标大小、方位、距离、角度偏差等信息的感知对于能否顺利完成遥操作任务起了关键的作用。视知觉在遥操作过程中的主要功能如下:
1)在初始阶段,用于对机械臂和目标之间相对位置的判断;
2)在中间阶段,除了用于判断机械臂和目标之间相对位置,还用于对机械臂和障碍相对距离的判断;
3)在后期阶段,用于判断机械臂与目标姿态、位置的偏差,判断是否能够准确抓取目标或安全无碰撞的对接目标。
3.2.2 空间能力
在初始阶段和任务中期,空间能力对于操作者能否按照计划路径接近目标、寻找目标起着关键的作用,关系到操作者能否对视觉信息正确理解、判断,以及能否进行正确的手柄操作。
3.2.3 记忆功能
1)在最初的一段时间,操作者对手柄操作规则(极性)的长时记忆(或短时记忆),能够减少手柄尝试性操作的次数和时间;
2)之后在实际的操作任务中,以工作记忆为主导,良好的工作记忆能力能对手柄操作的熟练程度有积极的影响作用。
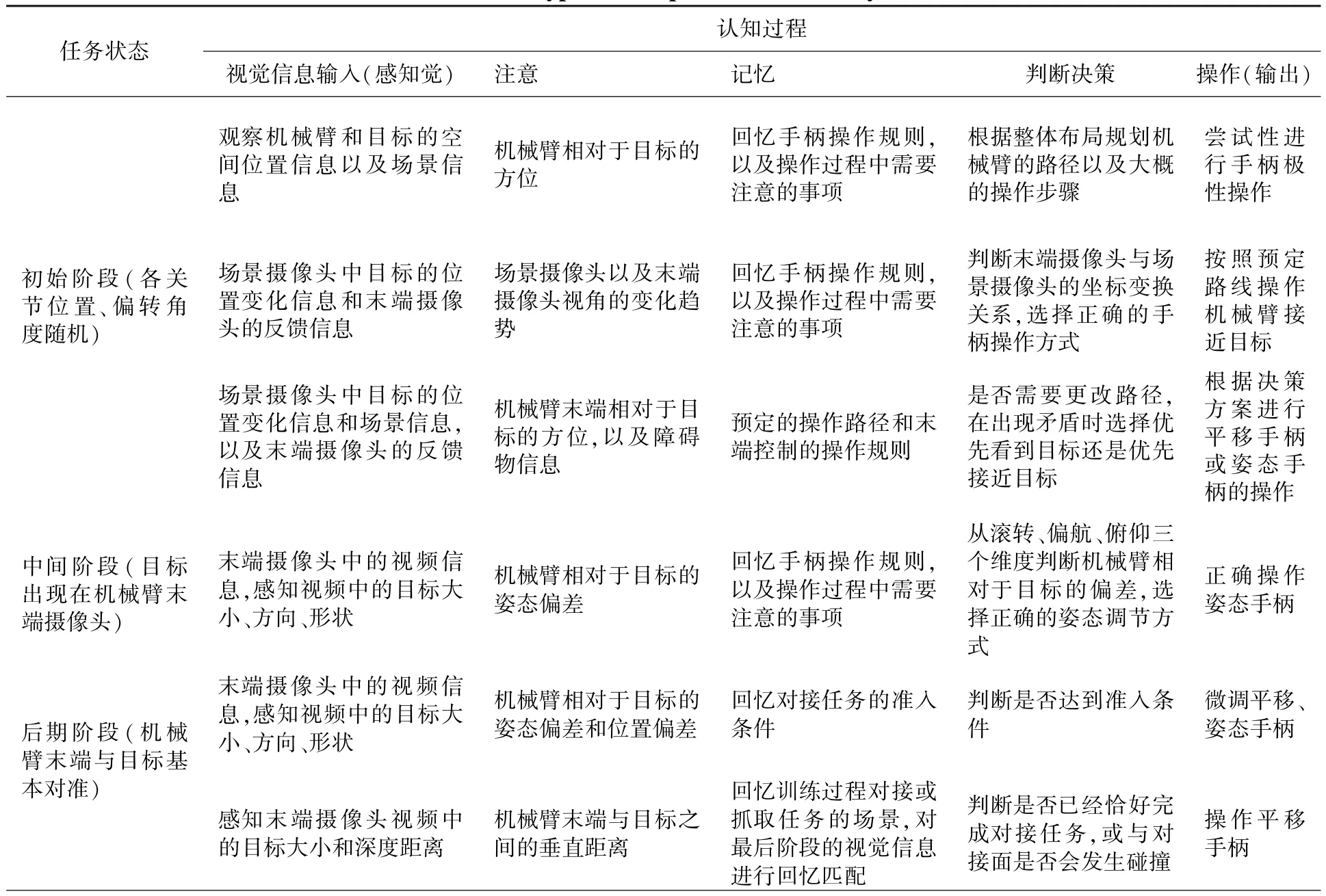
表1 典型遥操作任务分析Table 1 Typical teleoperation task analysis
3.2.4 情境意识以及注意能力
在遥操作过程中,情境意识尤为重要。操作者在整个操作过程对环境的认知、操作状态的认知以及对机械臂状态变化的认知和预测都属于情境意识范畴,是贯穿机械臂遥操作任务始末重要的认知功能[17]。其中注意能力是情境意识中的一项重要内容,在遥操作过程中的主要功能如下:
1)注意分配能力贯穿整个过程(包括对多个摄像头信息的注意分配以及对单视频中各项信息的注意分配),在操作后期阶段持续注意能力对操作绩效也有很重要的影响;
2)在初始阶段,注意主要集中于对手柄操作极性的认知;
3)在中间阶段,注意主要集中在机械臂与目标相对位置的变化、机械臂的运动路径等信息;
4)在后期阶段,注意主要集中于机械臂末端与目标的相对位置、姿态,以此来判断是否能够安全(无碰撞)完成任务。
3.2.5 操作能力
操作能力的体现主要是在逐渐熟悉手柄极性之后,包括操作机械臂按照预定路径行走的能力以及在后期对机械臂的微调节能力,尽少地避免往复操作。又可分为单手的多极性操作能力、双手的协调操作能力以及精细操作控制能力三部分。
4 遥操作的认知训练
航天员的认知能力不仅关乎在轨飞行任务的顺利完成,同时也是影响航天器以及航天员自身安全的重要因素。NASA于2008年开始建立人的行为和绩效资质要求,用于选拔和评估空间站乘组,包括对集中力、记忆、感知、想象力和思考力等认知能力的要求[19]。
无论是遥操作训练还是实际的任务,操作策略的选择、操作绩效的好坏,都是建立在操作者独自的认知功能水平上的。因此针对不同认知功能对遥操作的影响,NASA制定了相应的训练指标,并对航天员进行训练和测试。NASA航天员针对遥操作的训练主要使用的是BORIS(Basic Operational Robotics Instructional System)和MRMDF (Multi-Use Remote Manipulator Development Facility)两套机械臂系统[1]。每个人的训练过程都有航天教练员根据操作中的各个方面(指标)进行评估,其中包括空间(视空间)知觉(合适的摄像机选取[20]、追踪时间、总距离、最终位置等)、情境意识以及对输入量的控制等方面。针对每个航天员的不足,有针对性的开展模拟训练[6]。
目前NASA航天员主要在模拟臂上进行GRT (GenericRoboticsTraining)训练课程(至少13个技能模块)[1]。具体NASA的GRT项目和评估标准[9]按认知功能的不同可分为感知觉能力训练(表2)、空间能力训练(表3)、情景意识水平训练(表4)。
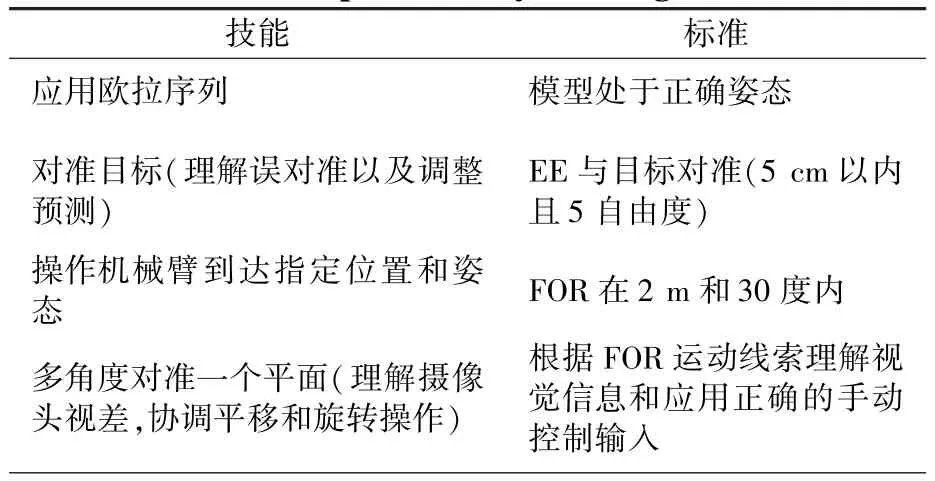
表2 感知觉能力训练指标Table 2 Perceptual ability training indicators
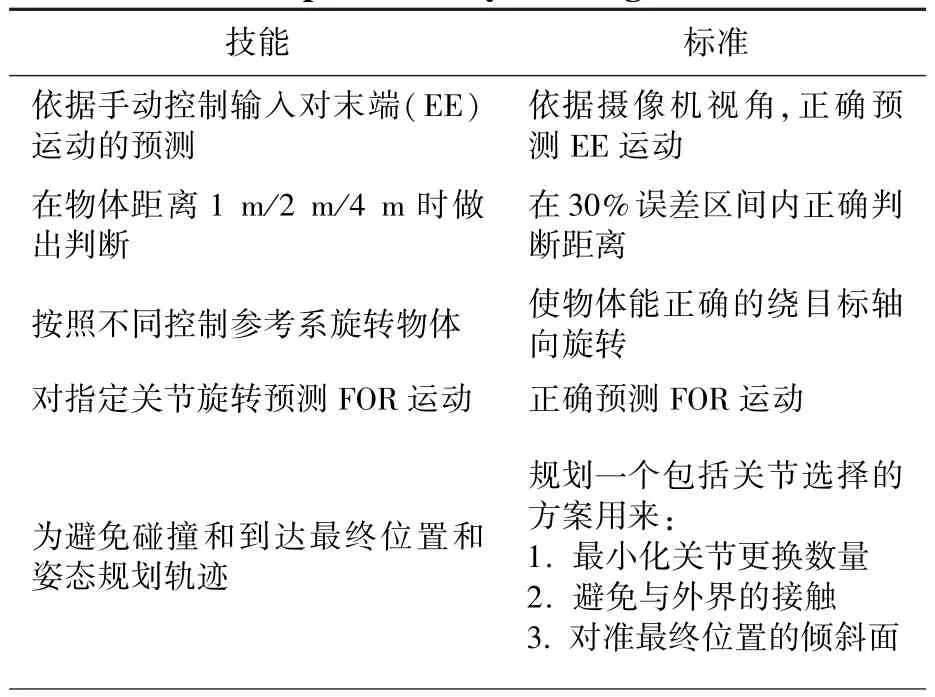
表3 空间能力训练指标Table 3 Spatial ability training indicators
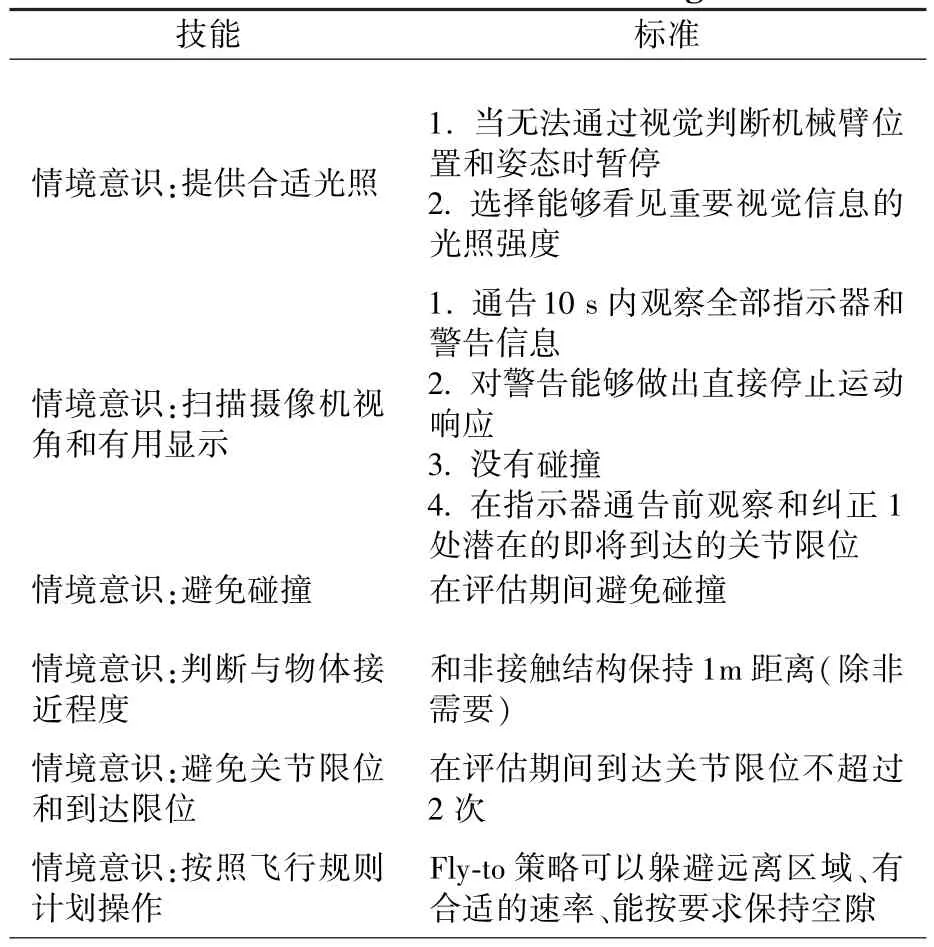
表4 情境意识训练指标Table 4 Situational awareness training indicators
5 总结与展望
本文从认知层面上探究了空间遥操作过程的影响因素,主要包括情境意识水平(注意分配能力、脑力负荷水平)、空间转换能力(空间定向、心理旋转、空间视觉化)、感知觉能力(深度知觉、速度知觉、位置感知、姿态感知等)等。着重分析了每项影响因子与遥操作任务绩效的相关关系,以及结合空间机械臂遥操作典型任务分析,剖析了遥操作过程中各项认知功能的作用。为将来深入开展认知层面上的空间遥操作研究、建立空间遥操作的人因可靠性分析体系奠定基础。此外,本文针对上述影响因子对NASA航天员的训练项目指标进行分类总结,为我国有针对性的开展航天员训练、合理分配操作任务提供理论参考。
通过对国外遥操作实验研究回顾,发现大多的实验无论在任务提取、额外变量控制、被试挑选等方面都存在一些问题:
1)实验特定任务和研究的问题(自变量)关系不紧密;
2)被试数量不足;
3)没有很好的控制学习效应;
4)认知能力测试范式的选择考虑不够周全;
5)在对被试进行情境意识问卷调查时,对被试的操作连贯性、脑力负荷等产生了很大的影响。
未来的空间遥操作研究应该着重于以下几点:
1)视觉信息呈现对遥操作任务的影响,包括对情境意识(注意分配、脑力负荷)、空间能力以及感知觉等的影响;
2)空间遥操作任务过程中,由于任务难度等级、操作不同阶段、环境改变等客观因素,情境意识水平、脑力负荷、注意分配等认知功能的变化,以及这些变化对遥操作任务绩效的影响机制;
3)从人因可靠性的角度出发,研究在遥操作过程中出现的人为失误,分析失误产生的原因,建立遥操作任务的人因可靠性分析体系。
参考文献(References)
[1] Forman R E.Objective Performance Metrics for Improved Space Telerobotics Training[D].Cambridge, MA:Massachusetts Institute of Technology, 2011.
[2] Menchaca Brandan M A.Influence of Spatial Orientation and Spatial Visualization Abilities on Space Teleoperation Performance[D].Cambridge, MA:Massachusetts Institute of Technology, 2007.
[3] Galvan R, Liu A, Rueger M, et al.Validation of assessment tests and countermeasures for detecting and mitigating changes in cognitive function due to fatigue during telerobotic operations[J].Aviation, Space, and Environmental Medicine, 2013, 84(4).
[4] 霍尔R D,谢勒D J.联盟号飞船[M].周晓飞,张柏楠,尚志,等译.北京:中国宇航出版社, 2006:373-378.Hall R D, Shayler D J.Soyuz:A Universal Spacecraft[M].ZHOU Xiaofei, ZHANG Bainan, SHANG Zhi, et al, translate.Beijing:China Astronautic Publishing House, 2006:373-378.(in Chinese)
[5] Menchaca-Brandan M A, Liu A M, Oman C M, et al.Influence of perspective-taking and mental rotation abilities in space teleoperation[C]/ / Proceedings of the ACM/ IEEE International Conference on Human-robot interaction.ACM, 2007:271-278.
[6] Sommer M, Herle M, Häusler J, et al.Cognitive and personality determinants of fitness to drive[J].Transportation Research Part F:Traffic Psychology and Behaviour, 2008, 11 (5):362-375.
[7] Kozhevnikov M, Hegarty M.A dissociation between object manipulation spatial ability and spatial orientation ability[J].Memory&Cognition, 2001, 29(5):745-756.
[8] Bektasli B.The Relationships between Spatial Ability, Logical Thinking, Mathematics Performance and Kinematics Graph Interpretation Skills of 12th Grade Physics Students[D].Columbus, OH:The Ohio State University, 2006.
[9] Lathan C E, Tracey M.The effects of operator spatial perception and sensory feedback on human-robot teleoperation performance[J].Presence:Teleoperators and Virtual Environments, 2002, 11(4):368-377.
[10] Guznov S, Reinerman-Jones L, Marble J.Applicability of situation awareness and workload metrics for use in assessing nuclear power plant designs[J].Advances in Cognitive Engineering and Neuroergonomics, 2012:91-98.
[11] Endsley M R.Toward a theory of situation awareness in dynamic systems[J].Human Factors:The Journal of the Human Factors and Ergonomics Society, 1995, 37(1):32-64.
[12] 李腾.飞行驾驶舱情境意识影响因素剖析[J].中国科技信息, 2012, 9:47-48.Li Teng.Influence factors analysis about the cockpit flight situational awareness[J].China Science and Technology Information, 2012, 9:47-48.(in Chinese)
[13] de Waard D.The Measurement of Drivers'Mental Workload [D].CP Groningen:University of Groningen, 1996.
[14] 柳忠起,袁修干,刘涛,等.航空功效中的脑力负荷测量技术[J].人类功效学, 2003, 9(2):19-22.Liu Zhongqi, Yuan Xiugan, Liu Tao, et al.Mental load measurement technology in aviation efficacy[J].Chinese Journal of Ergonomics, 2003, 9(2):19-22.(in Chinese)
[15] Steinfeld A, Fong T, Kaber D, et al.Common metrics for human-robot interaction[C]/ / Proceedings of the 1st ACM SIGCHI/ SIGART conference on Human-robot interaction.ACM, 2006:33-40.
[16] 薛书骐,姜国华,田志强,等.空间遥操作任务中显控界面关键技术研究进展[J].载人航天, 2014, 20(5):497-502.Xue Shuqi, Jiang Guohua, Tian Zhiqiang, et al.Progress of the key technologies in human-computer interface in space teleoperation[J].Manned Spaceflight, 2014, 20 (5):497-502.(in Chinese)
[17] Riley J M, Kaber D B, Draper J V.Situation awareness and attention allocation measures for quantifying telepresence experiences in teleoperation[J].Human Factors and Ergonomics in Manufacturing&Service Industries, 2004, 14(1):51-67.
[18] Kaber D B, Riley J M, Zhou R, et al.Effects of visual interface design, and control mode and latency on performance, telepresence and workload in a teleoperation task[C]/ / Proceedings of the Human Factors and Ergonomics Society Annual Meeting.SAGE Publications, 2000, 44(5):503-506.
[19] 陈善广,姜国华,王春慧.航天人因工程研究进展[J].载人航天, 2015, 21(2):95-105.Chen Shanguang, Jiang Guohua, Wang Chunhui.Advancement in space human factors engineering[J].Manned Spaceflight, 2015(2):95-105.(in Chinese)
[20] Lapointe J F, Dupuis E, Hartman L, et al.An analysis of low-earth orbit space operations[C]/ / Proceedings of the Joint Association of Canadian Ergonomists/ Applied Ergonomics (ACE-AE) Conference, October 21-23, 2002.
[21] 廉士乾,张力,王以群,等.人因失误机理及原因因素研究[J].工业安全与环保, 2007, 33(11):46-48.Lian Shiqian, Zhang Li, Wang Yiqun, et al.Study on human error and causal factors[J].Industrial Safety and Environmental Protection, 2007, 33(11):46-48.(in Chinese)
[22] 唐国金,周剑勇,张波,等.遥操作交会对接技术综述[J].载人航天, 2011, 17(2):38-44.Tang Guojin, Zhou Jianyong, Zhang Bo, et al.A survey of teleoperator rendezvous and docking technology[J].Manned Spaceflight, 2011, 17(2):38-44.(in Chinese)
[23] Huang C, Liu H, Sun F, et al.Space Robot Teleoperation Based on Active Vision[M]/ / Practical Applications of Intelligent Systems.Springer Berlin Heidelberg, 2014:229-240.
Analysis of Cognitive Function in Robotics Teleoperation
TANG Weicai1,CHEN Shanguang1,2*,XIAO Yi1
(1.China Astronaut Research and Training Center,National Key Laboratory of Human Factors Engineering,Beijing 100094,China;2.China Manned Space Agency,Beijing 100720,China)
Abstract:Identification of the cognitive function and study of the cognitive behaviorin teleoperation are conducive to perform the teleoperation task successfully and set up the human reliability analysis system in space teleoperation.The relationship between situation awareness,space transformation ability,perception and teleoperation process was analyzed according to the previous researches.The influence of various cognitive functions in various stages of operation process was studied based on the specific teleoperation task.NASA training assessment metric was studied and classified according to situation awareness,space transformation ability and perception.Furthermore,some tips about future study of space teleoperation from the cognitive level were proposed and the future study of space teleoperation from visual information representation,cognitive function change and human error prediction was prospected.
Key words:teleoperation;cognitive function;perception;space switching;situation awareness
*通讯作者:陈善广(1962-),男,博士,研究员,研究方向为航天人因工程。E-mail:shanguang_chen@126.com
作者简介:唐伟财(1991-),男,硕士研究生,研究方向为航天人因可靠性。E-mail:jipingacai@163.com
基金项目:重点实验室自主课题( HF2011-Z-Z-A-01);国家自然基金(71201148);中国航天医学工程预先研究项目资助(2012SY54A1705);国家自然科学基金项目(71371174)
收稿日期:2015-06-23;修回日期:2016-02-05
中图分类号:V527
文献标识码:A
文章编号:1674-5825(2016)02-0262-07
猜你喜欢
山东体育学院学报(2016年5期)2017-01-18
中国医药导报(2016年29期)2016-12-27
中国实用医药(2016年29期)2016-12-26
中国当代医药(2016年28期)2016-12-20
中外医学研究(2016年26期)2016-11-30
艺术科技(2016年9期)2016-11-18
中国现代医生(2016年23期)2016-11-15
中国实用医药(2016年26期)2016-11-07
中国实用医药(2016年26期)2016-11-07
中国实用医药(2016年21期)2016-08-19