可拓聚类适应度共享小生境遗传算法研究
2016-05-17 07:24:58李中华张泰山
哈尔滨工业大学学报 2016年5期
李中华, 张泰山
(中南大学 信息科学与工程学院, 410083 长沙)
可拓聚类适应度共享小生境遗传算法研究
李中华, 张泰山
(中南大学 信息科学与工程学院, 410083 长沙)
摘要:针对遗传算法易陷入早熟收敛和全局搜索能力差等缺点,提出一种基于可拓理论的小生境遗传算法. 算法首先构造了遗传编码物元和可拓遗传算子,然后通过可拓聚类方法实现小生境群体的划分,结合适应度共享技术和聚类代表个体保存策略,维持稳定多样的小生境. 仿真实验表明,该算法能可靠、快速地收敛到全局最优解,有效避免早熟收敛,其收敛速度和求解精度均优于简单遗传算法和常规小生境算法.
关键词:遗传算法;小生境;可拓聚类;适应度共享;代表个体;早熟收敛
基本遗传算法(SGA)是一类模拟生物进化的智能优化算法,已广泛应用于工程领域的优化求解. 但大量实践和研究表明,基本遗传算法存在全局搜索能力差和早熟收敛等问题,被称为基因漂移[1]. 针对这一问题, 学者提出了各种小生境遗传算法(NGA),但这些经典的小生境技术均存在参数设置问题[2-5]. 这些参数的预设与优化需要一定的先验知识,处置不当将难以维持稳定的小生境,从而限制了算法的有效运用.
本文基于可拓理论[6]和全局性优化考虑,提出可拓聚类适应度共享小生境遗传算法(ECNGA). 算法基本原理为:构造可拓遗传算法模型,提出遗传信息物元编码和可拓遗传算子;利用可拓聚类方法对每代种群划分形成小生境群体;根据适应度共享机制调整个体适应度,再种群进化,并结合聚类小生境的代表个体保存策略,维持小生境的稳定性和多样性,从而有效地防止算法早熟收敛,增强全局搜索能力.
1可拓聚类分析
定义1设聚类Hp={R1,R2,…,Rnp},类内样本个体的物元模型[6]为
对i=1,2,…,m,各物元特征Ci的属性值分别为v1iv2i…vnpi. 令
称类Hp各特征属性取值区间为Vpi(Cpi)=[api,bpi].
定义Rp为类Hp的中心物元,记为
若np=1时,令Vpi(Cpi)=[ai,bi],即各特征属性取值为节域区间,同时令中心物元为Rp=R1.
定义2关联度计算准则[6-8]:
1)已知类Hp={R1,R2,…,Rnp},取待聚类样本Rx=[N,C,V],样本的m维特征观测值为V=(x1,x2,…,xm)T.
2)对类Hp,计算Rx各特征属性xi的基本关联函数为
3)计算综合关联度Kx(Hp).若规定各项聚类特征的权重系数为λp=[λp1,λp2,…,λpm],则
权重系数表示各项特征在聚类评价体系中的相对重要程度,可采用专家评价法、层次分析法或比重权数法确定[7].
关联度Kx(Hp)表示样本Rx与类Hp={R1,R2,…,Rnp}的关联程度,其取值大小是判定样本是否归属该类的直接依据.
可拓聚类方法的基本流程如下:
Step 1按照聚类样本的指标或维数建立物元模型为


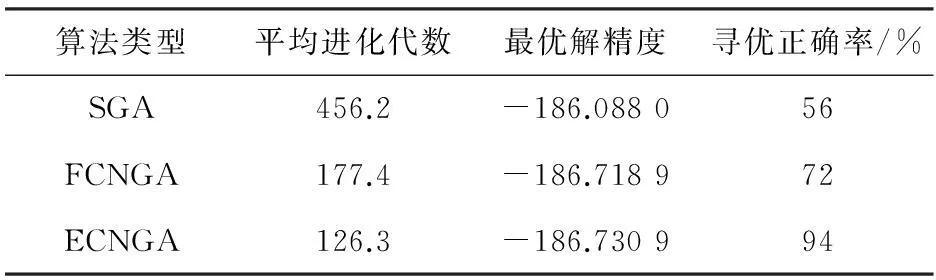
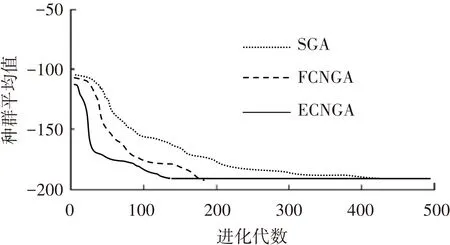
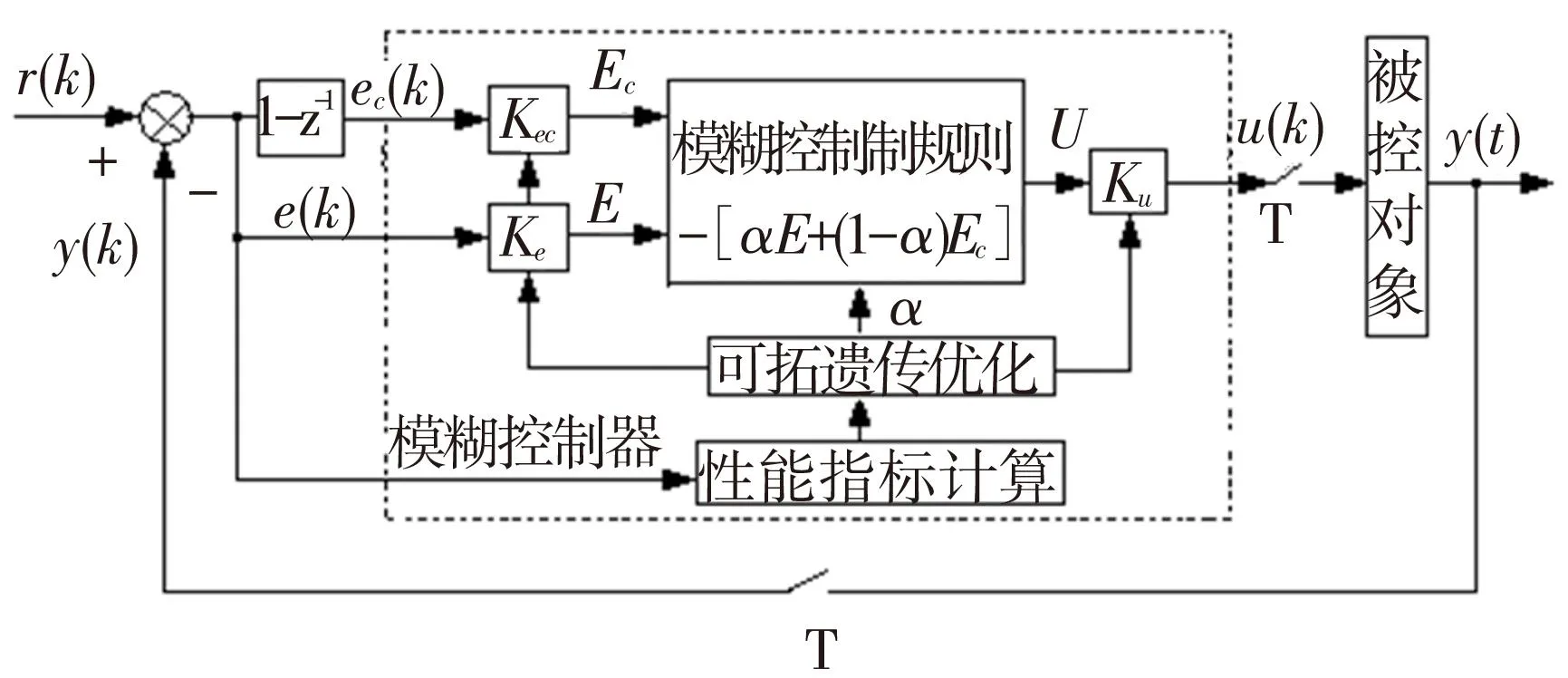
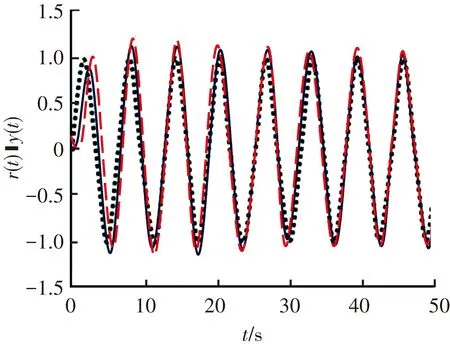
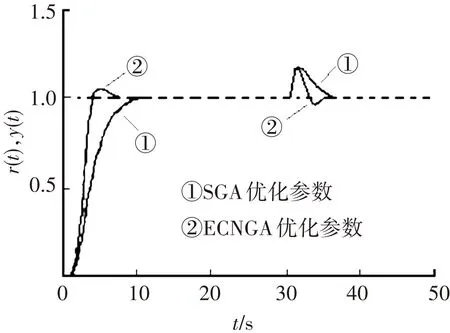
Step 2初始化聚类. 将待聚类物元按某种规则排序(例如遗传优化的适应度排序),并产生一随机数k(1 Step 3依次取剩余样本Rx,计算Rx对类Hp(p=1,2,…,k)的关联度Kx(H1),Kx(H2),…,Kx(Hk). Step 4判定待聚类样本Rx的类属. 令Kx(Hq)=max{Kx(H1),Kx(H2),…,Kx(Hk)}. 若Kx(Hq)>0,则Rx属于类Hq;Kx(Hq)=0,可认为Rx属于或不属于类Hq;Kx(Hq)<0,Rx不属于已知类,需增加新的聚类,即设样本Rx为新类别,聚类数目k=k+1. Step 5调整新增样本的类Hq或新增类的属性取值区间、中心物元,并求平均关联度. Hq类内平均关联度记为 式中,nq是Hq类内样本数目,Ki(Hq)是类内第i个样本的关联度. Step 7跳转Step3,处理所有待聚类的n-k个样本物元. Step 8聚类检验. 1)对类Hp(p=1,2,…,k),计算并固定中心物元Rp; 2)计算所有物元Rx对所有类的关联Kx(Hp)(x=1,2,…,n,p=1,2,…,k); 3)令Kx(Hq)=max{Kx(H1),…,Kx(Hk)},聚类样本Rx归属至类Hq; 4)循环以上3步,直至所有样本个体的聚类归属不变. Step 9输出聚类结果,包括聚类数目k,每一个聚类Hp下的样本数np,及类内样本关于该聚类的关联度Kx(Hp). 熵是反映集合内样本聚类多样性程度的重要指标. 2可拓聚类适应度共享小生境遗传算法 2.1DNA编码物元 定义4设遗传信息为物元的集合,记为Ri=[N,C,V]. 基因特征属性Cj(j=1,2,…,m)的量值为vij,其定义域Vj=[aj,bj]. 将属性量值用遗传算法编码(l1,l2,…,lt)表示,则每项特征所对应的编码为 式中,X1,X2,….Xt为在[-,+]的t个区间. 经过量值编码后,将遗传信息物元扩展定义为DNA编码物元[7],记为 2.2可拓遗传算子 定义5设DNA编码物元R0∈R,将R0改变为另一个同类DNA编码物元或多个同类编码物元的可拓变换,称为R0的可拓遗传算子,记作 可拓遗传算子可用事元[6]的形式化语言表示为 式中,OT是动作的名称,表示实施遗传操作的类型,即 OT∈{复制,交叉,变异,置换,增删,扩缩,…}. 可拓遗传可解析为:vt4对vt1实施变换OT,变换量为vt2,变换结果为vt3. 结合物元可拓变换的多种形式, 可得一些常用或特有的可拓遗传算子. 1)复制算子(或称选择算子)T{R}={R},即 常用的复制选择方法有适应度比例选择法、锦标赛选择法和排序选择法. 式中,(i,j)表示交叉的基因座位置. 若为实数编码的算术交叉算子,取随机数α∈(0,1),则有 2.3小生境构造及适应度共享 基于可拓聚类方法构造小生境,对个体适应度共享. 其基本过程为: 1)对每代种群X(t)进行可拓聚类. 聚类数目k,每一个类Hp下的样本数np,类内样本关联度Kx(Hp). 2)定义每个聚类中个体的小生境数[8-9]为 式中,mi为个体i的小生境数,其值越大,表示其相似个体越多,反之越稀疏. 3)适应度共享,调整小生境中个体的适应度为 式中fi、fi′分别为共享前、后的适应度. ECNGA算法对种群聚类,并选出每类的代表个体[10]保存至下一代种群. 代表个体保存策略如下: Step 2遗传生成种群X(t+1),并可拓聚类; Step 3取ai(t)(i=1,2,…,k),判断其聚类归属Hp(p∈[1,2,…,k′]); Step 4以代表个体替换聚类Hp中适应度最低的个体; Step 5比较代表个体ai(t)与目前聚类中适应度最高个体的bp(t+1),若f(ai(t)) 采用适应度共享机制和代表个体保存策略进行遗传操作,可使种群维持稳定且多样的小生境,提高算法的全局搜索能力. 2.4交叉概率Pc和变异概率Pm 为促进种群的多样性,Pc、Pm应与小生境熵Et呈负相关关系. 另外,对适应度高的个体,可增大Pc以加快其进化速度,减小Pm以避免破坏其结构模式. 因此,设计自适应调整Pc和Pm为 2.5ECNGA可拓小生境遗传算法流程 Step 2计算种群X(t)中个体适应度fi,按适应度降序排列. Step 4代表个体保存并更新标记. Step 5计算种群中所有个体的共享适应度fi′. Step 6种群进化,即可拓遗传形成种群X(t+1). 1)可拓选择从父代X(t)中运用选择算子选择出n/2 对个体. 2)可拓交叉n/2对个体依概率Pc进行交叉,形成n个中间个体. 3)可拓变异依概率Pm对n个中间个体变异,形成子代X(t+1). Step 7终止检验. 若不满足终止准则,置t←t+1并跳转step2;满足时则输出种群X(t+1)中最优解. 2.6算法收敛性分析 引理1[10-11]基本遗传算法SGA收敛到全局最优解的概率小于1. 引理2[10-11]保留最优个体的GA算法以概率1收敛到全局最优解. 定理1采用代表个体保存策略的ECNGA算法以概率1收敛到全局最优解. 证明标记代表个体{a1(t),a2(t),…,ak(t)}∈X(t),令 即ap(t)为X(t)的最优个体. 1)设p=q,若ap(t)>bq(t+1),则最优个体ap(t)被保存;反之即存在超过ap(t)的最优个体bq(t+1),且bq(t+1)被保存. 2)设p≠q,ap(t)>bq(t+1),则ap(t)>bp(t+1),最优个体ap(t)在类Hp中保存;ap(t) 综上,采用代表个体保存策略的ECNGA算法在每代选择操作前保留最优个体,依据引理2,ECNGA算法以概率1收敛到全局最优解. 3仿真实验及分析 实验1经典多峰Shubert函数寻优. Shubert函数有760个局部最优点和18个全局最优点,全局最优目标函数值-186.730 9. 取适应度函数为 同时比较SGA、模糊聚类FCNGA[4]及ECNGA三种算法. 参考文献[4]设置算法参数:每次随机产生初始种群,规模n=100,进化代数Gmax=500,交叉算子ηc=0.6,变异算子ηm=0.01,终止条件为目标函数值与当前最优解差0.1%时或进化代数达Gmax,优化重复次数50. 仿真结果如表1所示,进化曲线图1所示. 表1 多峰函数寻优仿真结果对比 图1 种群平均值进化曲线 从表1数据及图1进化曲线可知,ECNGA算法明显优于其他两种算法,搜索能力较强,有更高的求解质量和更快的收敛速度,并避免了出现早熟而陷入局部极值的情形. 实验2自调整模糊控制器优化设计. 图2所示为基于可拓遗传优化的自调整模糊控制系统结构图. 图2中各物理量分别为系统给定值r(k)、输出响应y(k)、误差e(k)、误差变化率ec(k)及控制输出量u(k). 模糊控制规则解析式为 式中:E、EC为误差、误差变化率量化取整,U为控制量量化取整,修正因子α∈[αL,αH] 且0<αL≤αH<1. 图2 可拓遗传优化的自调整模糊控制系统结构图 图2中可拓遗传优化机构的作用是根据所选取的寻优目标函数,搜索修正因子α、量化因子Ke、Kec及比例因子Ku等复杂多维参数的全局最优解,构成最优模糊控制器. 选取ITAE作为寻优目标函数,即 式中,T为采样周期,n为决定ITAE指标的总时间. 在MATLAB/SIMULINK中构建寻优模糊控制系统. 设对象为多数工控过程的二阶惯性加延迟的模型: 设置寻优约束条件[12]为 式中:δ为控制要求的稳态误差,取δ=0.01;umax为被控对象允许输入的最大值,仿真模块内取umax=12 V. ECNGA算法寻优后获得最优控制参数为(Ke,Kec,Ku,αL,αH)=(12.7,36.1,1.57,0.23,0.84),同等条件下,SGA算法优化参数为(Ke,Kec,Ku,αL,αH)=(13.6,41.4,1.69,0.26,0.78). 将两组优化参数分别代入自调整模糊控制仿真模块,即可得控制结果曲线,如图3、4所示. 采样周期T=0.1 s. 图3 正弦信号跟踪 图4 阶跃信号跟踪 1)正弦信号跟踪实验. 如图3曲线所示,点形虚线为给定信号r(t)=sint,取ITAE控制指标总时间为50. 线段虚线为SGA优化的模糊控制正弦响应曲线,其ITAE=273.1,实线为ECNGA优化后的模糊控制正弦响应曲线,其ITAE=211.5. 2)阶跃信号跟踪实验. 如图4所示,给定阶跃信号r(t)=ε(t),10 s前为模糊控制阶跃响应上升阶段. 曲线①为SGA优化参数,ITAE=11.2,稳态e()=0.004 7;曲线②为ECNGA优化参数,ITAE=5.9,稳态e()=-0.001 4. 在30 s处施加负载扰动时,可观察优化模糊控制器能更快恢复稳定. 对比两组优化参数可知,ECNGA优化方法可获得全局最优解,其模糊控制器在信号跟踪的动静态性能方面优于SGA优化模糊控制,其响应曲线虽然稍有超调, 但调节时间大大缩短,控制精度和稳态性能也有了比较明显的改进,而且对扰动的鲁棒稳定性更好. 4结论 1)使用可拓聚类分析对种群划分小生境,按照共享机制对个体的适应度进行调整,可以增大种群多样性和有效防止早熟收敛;结合聚类代表个体保存策略,维持稳定的小生境,以增强全局搜索能力. 2)引入度量种群多样性的小生境熵自动调整进化参数,可有效平衡算法快速性和多样性的矛盾. 3)该算法优于标准遗传算法和常规小生境遗传算法,具有全局寻优能力和较高的搜索效率,是一种适用于复杂寻优问题的有效优化算法. 参考文献 [1] 玄光男,程润伟. 遗传算法与工程优化[M].北京:清华大学出版社,2004:21-30. [2] CHEN C H, LIU T K, CHOU Y H. A novel crowding genetic algorithm and its applications to manufacturing robots[J]. IEEE Transactions on Industrial Informatics, 2014, 10(3): 1705-1706. [3] KIM Hyoungjin, LIOU Mengsing. New fitness sharing approach for multi-objective genetic algorthm[J]. Journal of Global Optimization,2013,55(3):579-595. [4] 谭艳艳,许峰.自适应模糊聚类小生境遗传算法[J].计算机工程与应用, 2009,45(4): 52-55. [5] 陆青,梁昌勇, 杨善林,等.面向多模态函数优化的自适应小生境遗传算法[J].模式识别与人工智能, 2009,22(1):91-99. [6] 杨春燕,蔡文.可拓学[M]. 北京:科学出版社,2014: 18-96. [7] 王科俊,徐晶, 王磊,等. 基于可拓遗传算法的机器人路径规划[J] 哈尔滨工业大学学报,2006,38(7):1135-1138. [8] 赵 敏,林道荣, 瞿波,等.一种新的基于小生境模拟退火的遗传算法[J].辽宁工程技术大学学报, 2013,32(3):367-372. [9] SANTRA A K., CHRISTY C. J, NAGARAJAN B. Cluster based hybrid niche mimetic and genetic algorithm for text document categorization[J]. International Journal of Computer Science Issues, 2011, 8(2): 450-456. [10]何琳,王科俊, 李国斌,等.最优保留遗传算法及其收敛性分析[J].控制与决策, 2000,15(1): 63-66. [11]LI Junhua,LI Ming. An analysis on convergence and convergence rate estimate of elitist genetic algorithms in noisy environments[J]. Optik, 2013,124(24):6780-6785. [12]葛平淑,郭烈.参数自调整的月球车路径跟踪模糊控制器设计[J].计算机工程与应用, 2012,48(11): 55-59. (编辑王小唯苗秀芝) Research of fitness sharing niche genetic algorithms based on extension clustering LI Zhonghua, ZHANG Taishan (School of Information Science and Engineering, Central South University, 410083 Changsha, China) Abstract:To solve the problems of premature convergence and weak ability in global search of the genetic algorithm, a fitness sharing niche genetic algorithm based on extenics is proposed.The algorithm build the matter-element code and extension genetic operator, create niche groups by extension clustering, and preserve the stability of niche groups by combining fitness sharing mechanism and elitist retention strategy. Experiments show that the algorithm can solve the optimal performance with global search ability and fast convergence rate. It is proved to be more effective and accurate than standard geneic algorithm and normal niche genetic algorithm. Keywords:genetic algorithm; niche; extension clustering; fitness sharing; elitist retention; premature convergence 中图分类号:TP319.4 文献标志码:A 文章编号:0367-6234(2016)05-0178-06 通信作者:李中华,chinali@csu.edu.cn. 作者简介:李中华(1968—), 男, 博士, 副教授; 收稿日期:2015-03-05. doi:10.11918/j.issn.0367-6234.2016.05.029 张泰山(1940—), 男, 教授, 博士生导师.



 猜你喜欢
猜你喜欢
——以贵阳花溪公园为例山地农业生物学报(2022年3期)2022-05-13 09:58:54测控技术(2018年2期)2018-12-09 09:00:54石油地球物理勘探(2017年2期)2017-11-23 06:02:04中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32统计与决策(2017年2期)2017-03-20 15:25:24湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:42现代防御技术(2016年1期)2016-06-01 12:13:27智能系统学报(2015年4期)2015-12-27 09:38:39计算机工程(2015年8期)2015-07-03 12:19:20通化师范学院学报(2014年8期)2014-06-12 03:22:08