智能软聚合物及其航空航天领域应用
2016-05-17 07:17:30刘立武刘彦菊冷劲松
哈尔滨工业大学学报 2016年5期
刘立武, 赵 伟, 兰 鑫, 刘彦菊, 冷劲松
(1.哈尔滨工业大学 航天学院 航天科学与力学系, 150001 哈尔滨; 2.哈尔滨工业大学 航天学院 复合材料与结构研究所, 150080 哈尔滨)
智能软聚合物及其航空航天领域应用
刘立武1, 赵伟1, 兰鑫2, 刘彦菊1, 冷劲松2
(1.哈尔滨工业大学 航天学院 航天科学与力学系, 150001 哈尔滨; 2.哈尔滨工业大学 航天学院 复合材料与结构研究所, 150080 哈尔滨)
摘要:智能软材料针对外界的刺激(如温度、电场、光、磁场等等)能够产生不同程度的形变而体现出活性. 作为新型智能软活性聚合物材料的代表,形状记忆聚合物和电致活性聚合物主动软材料日益显示出巨大的应用前景. 本文综述了形状记忆聚合物及其复合材料以及驱动方法,形状记忆聚合物智能材料在航天领域的应用,介电弹性体材料及其复合材料,介电弹性体材料的理论研究进展,介电弹性体材料在航空航天领域的应用.
关键词:智能软聚合物; 复合材料; 航空航天; 主动变形; 驱动方法
智能软材料是一种能感知外部刺激的新型功能材料,具有可承受大变形、具备良好生物亲和性、相容性、轻质廉价等特点. 软智能材料及其智能器件有巨大的潜在应用前景,大到石油开采密封,小到药物输送,在航空航天、智能仿生、机械、医疗、军工等领域都有广泛的应用,由于其变形能力和驱动力接近于生物肌肉,在机器人领域也有非常好的发展前景. 在很长的一段时间,研究人员致力于硬质材料研究,它们在机械工程等领域广泛应用. 而自然界中动、植物生物体的结构通常是智能软质材料. 作为新型智能软活性聚合物材料的代表,形状记忆聚合物和电致活性聚合物主动软材料日益显示出巨大的优越性.
1形状记忆聚合物及其复合材料
1.1形状记忆聚合物
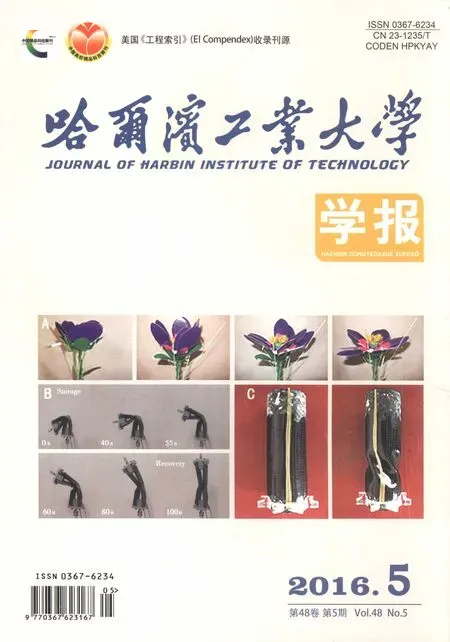
形状记忆聚合物是一种具有形状记忆效应的聚合物材料,该聚合物材料具有独特的分子机制,当外部条件发生变化时,它可相应地改变形状并将其固定[1-5]. 如果外部环境的变化再次触动了聚合物分子的机制,它能可逆地恢复至起始态;至此完成“形状记忆”的循环,聚合物的这种特性称为材料的记忆效应. (形状记忆聚合物及的变形回复过程见图1. 与常规高分子材料类似,形状记忆聚合物也具有三维分子网状结构(见图2). 这些网状结构被认为是聚合物链段结构通过交联点相互连接,这一相对稳固的交联结构保证了形状记忆聚合物在原始态和回复态的宏观形态[1-5]. 形状记忆聚合物通常是由保持聚合物原始形状的固定相以及随温度变化能发生可逆软化与硬化变化的可逆相组成[1-5].
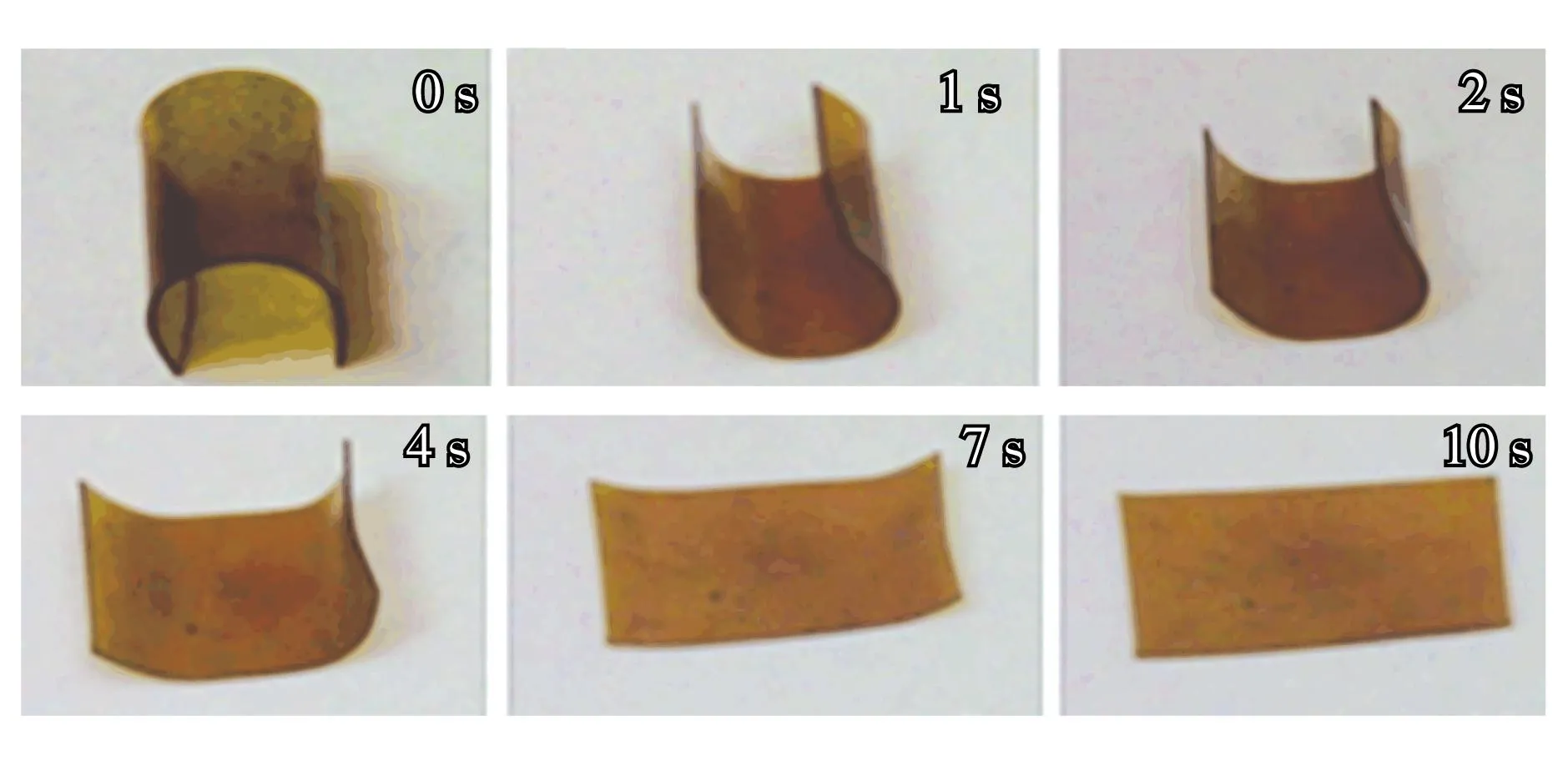
图1 形状记忆聚合物及其复合材料的变形回复过程[6]
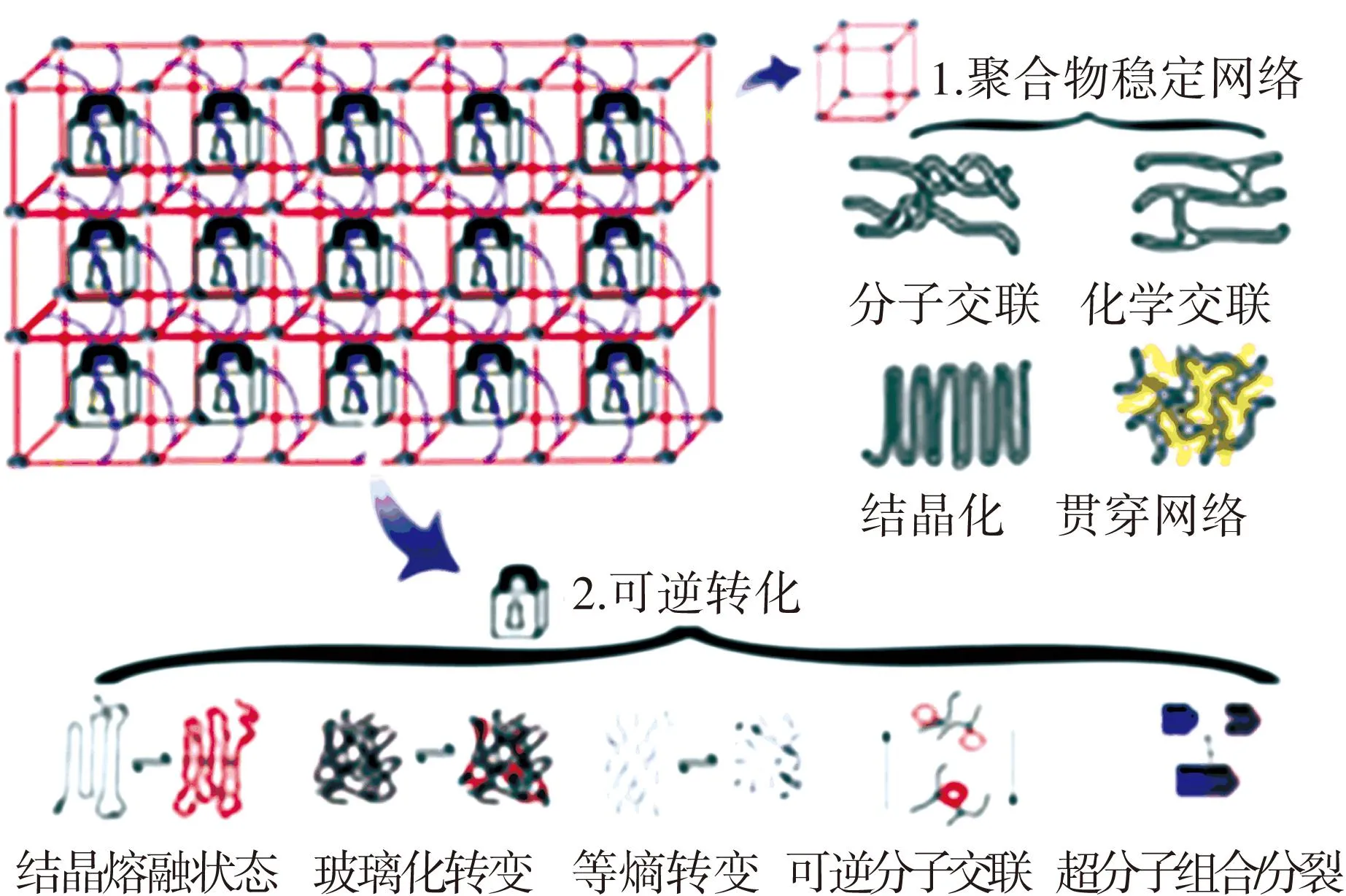
图2 形状记忆聚合物的多种分子结构示意[7]
以热致型形状记忆聚合物为例,其固定相的结晶熔融温度Tm或玻璃化转变温度Tg较高,在材料的使用温度范围内不会发生软化和松弛,可保证材料原始形状的记忆与回复;可逆相的Tm或Tg较低,能随温度变化相应发生软化、硬化,保证材料具有较高的变形能力.
图3为形状记忆聚合物在变形和回复阶段的网络结构的变化示意图. 其中,可逆相为长的线条,代表聚合物中的分子链段;固定相为黑色点,代表将分子链段连接在一起的网络交联点. 当材料温度低于形状记忆聚合物的玻璃化转变温度Tg时,材料可逆相和固定相均处于冻结状态;当温度高于玻璃化转变温度Tg以上时,可逆相的微观布朗运动加剧,材料发生软化,在外载作用下可逆相由卷曲缠绕状态变为较为伸展的有序状态,保持外载作用将材料冷却至玻璃化转变温度Tg下,此时可逆相处于玻璃状态,材料保持变形形状. 当温度再次升高至玻璃化转变温度Tg以上时,可逆相再次由玻璃状态逐渐过渡为活动状态,并在固定相的作用下重新回复到初始的卷曲缠绕状态. 材料在宏观上表现为软化并发生形状回复[7-9].
1.2形状记忆聚合物复合材料
形状记忆聚合物具有可回复应变较大的特点,一般能达到10%~100%[10],但材料的模量、强度等力学和热-力学性能较差,导致材料变形回复输出力较小,运动稳定性和可靠性较差,蠕变和松弛现象较严重等缺点,影响了其应用,特别是在航天器上的应用[11]. 通过形状记忆聚合物与其它增强材料(如颗粒、纤维)掺杂,经过复合工艺制备形成的形状记忆聚合物复合材料,使材料具备了可回复应变大、变形回复输出力较大、比强度、比刚度高和低成本等优点[11-18].
图3 形状回复过程中形状记忆聚合物网络结构变化示意[7]
颗粒填充形状记忆复合材料通过向聚合物中添加特定颗粒改善材料力学和热-力学特性,可作为功能材料. 但颗粒填充相在形状记忆聚合物中多为随机均匀分布,可主动控制性较弱[19-20]. Gall等通过对环氧型形状记忆聚合物添加SiC颗粒, 研究发现SiC纳米颗粒增强的形状记忆聚合物复合材料其弹性模量及回复力有所增强,对其形状恢复性能也有一定影响[20-21]. Huang等研究了碳黑增强的的形状记忆聚氨酯,研究发现该形状记忆复合材料具有良好的导电性和形状记忆性能[22-23]. Leng等将极少量的镍粉添加于碳黑填充的形状记忆复合材料中,研究了Ni粉对该复合材料的热力学性质的影响,发现Ni粉分布成链结构对SMP的力学性能具有更强的增强作用[24-25].
纤维增强的形状记忆复合材料的相比于形状记忆聚合物,回复力较大,强度高,刚度高,综合力学性能好,因此可作为结构材料. 纤维增强相的有效应变一般<2%,故材料变形的主方向通常不选为纤维增强方向[26-27]. 与常规树脂基复合材料相比,纤维增强的形状记忆复合材料具有功能性[10]. Wei等分别用碳纤维、玻璃纤维和Kevlar纤维制备环氧形状记忆聚合物复合材料. 力学性能测试结果表明,各纤维增强的复合材料的刚度、强度都较原基体显著提高[17]. Ohki等以聚氨酯形状记忆聚合物为基体,制备了不同玻璃纤维质量含量的形状记忆聚合物复合材料,测试的这些样品的力学性能和形状记忆效果表明:玻璃纤维明显的提高了聚氨酯形状记忆聚合物复合材料的拉伸强度,加入玻璃纤维后的聚氨酯形状记忆聚合物复合材料仍保持形状记忆特性[18]. 美国的Colorado大学以及CTD(composites technology development)、CRG(cornerstone research group)两个公司大量研究了大量长纤维和纤维布增强形状记忆聚合物复合材料. 其制备工艺与普通复合材料制备工艺相同,纤维质量百分比含量一般在10%~40%,但其强度、弹性模量等力学性能比纯形状记忆聚合物提高20%以上[27]. 目前,作为结构材料应用的形状记忆聚合物复合材料多为碳纤维增强型.
1.3形状记忆聚合物复合材料驱动方法
外部能量可以驱动形状记忆聚合物复合材料回复或近似回复到初始形状. 有代表性的形状记忆聚合物材料的驱动方式包括:热驱动、电驱动、磁场驱动、和溶液驱动、水驱动等[1, 3]. 施加外电场时,形状记忆复合材料中的碳纳米管、碳黑、碳纤维等导电增强相上将通过电流,由于焦耳热效应,一部分电能转化为热能[1-5]. 转化的热能使导电增强相的温度升高,热量向聚合物基体传递,使复合材料达到其玻璃化转变温度之上,形状记忆效应被触发,实现复合材料的电驱动. Leng 和Lv等将短(碳)纤维、碳纳米管、碳纳米(纤维)纸等作为形状记忆聚合物材料的电驱动过程中的导电介质. 图4为形状记忆聚合物的电驱动的回复过程[15].
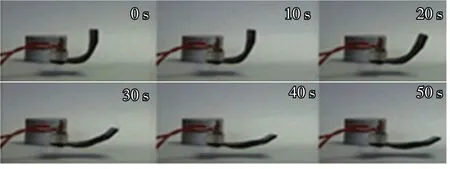
图4 形状记忆聚合物复合材料的电驱动回复过程[15]
在形状记忆聚合物复合材料中埋入光纤,通过光纤将特定波长的光能传递到聚合物中,光能被吸收后,加热复合材料到其玻璃化转变温度以上,从而实现形状记忆聚合物的光驱动[1-5]. Leng等实现通过光纤将波长为3-4 μm的红外光传递到聚合物中实现其光驱动(见图5)[1-5].
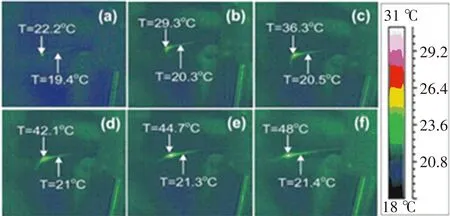
图5 形状记忆聚合物的红外驱动回复过程[1-5]
施加外磁场时,形状记忆聚合物复合材料内部的磁性颗粒随着磁场的周期变化而发生运动,磁性颗粒与聚合物分子之间的相对运动的摩擦和碰撞产生热量;热量加热复合材料,达到其玻璃化转变温度之上,形状记忆效应被触发,实现基于形状记忆聚合物复合材料的磁驱动[1-5,28]. Leng等提出并证实了导电/磁性颗粒在磁场诱导下所形成的链状结构能极大的提高形状记忆复合材料的电驱动性能[1-5]. 图6为磁场驱动的形状记忆聚合物复合材料的形状回复图.
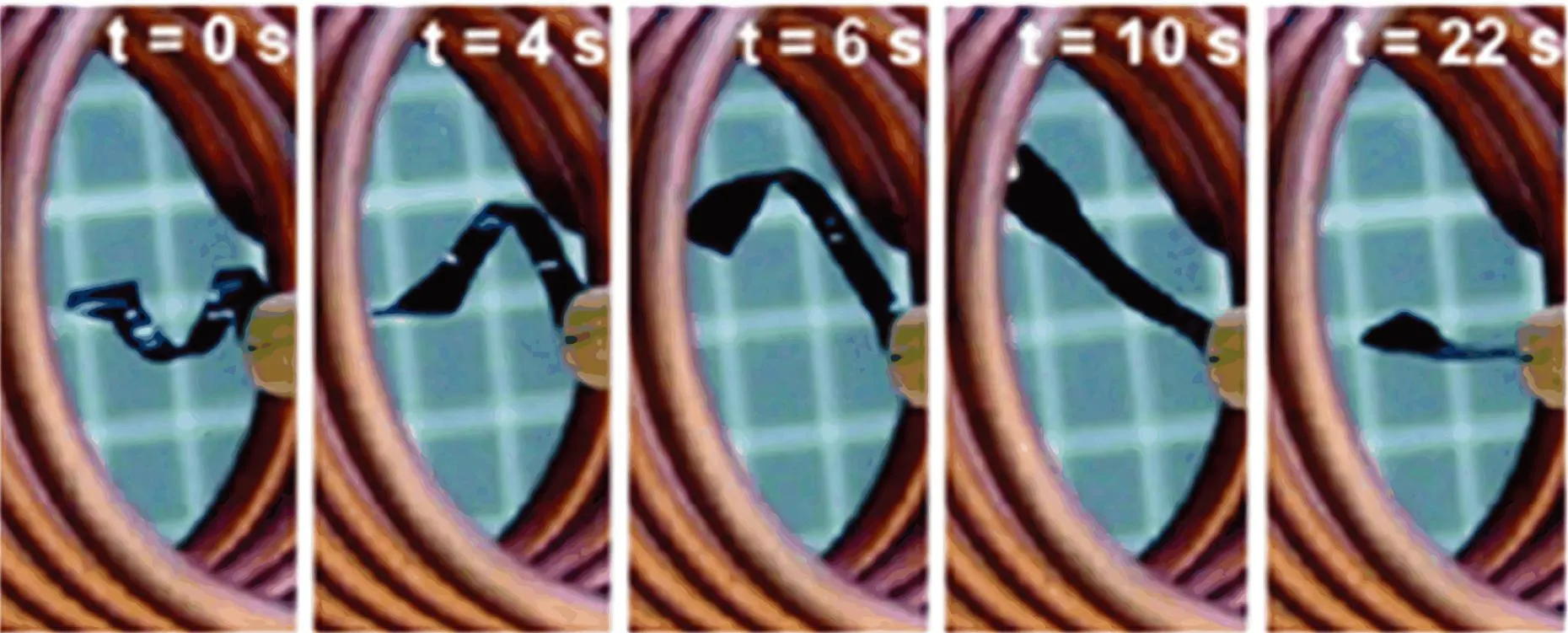
图6 磁场驱动形状记忆聚合物复合材料的形状回复图[1,28]
新加坡南洋理工大学Huang 等研究人员首先发现并证实了水或湿气对聚氨酯形状记忆聚合物的形状记忆效应有驱动作用. 研究发现湿气对热塑性聚氨酯形状记忆聚合物的玻璃化温度和弹性模量等物理性能有强烈的降低作用,进而证明了水或湿气可驱动形状聚合物的恢复过程(见图7). 水驱动的基本原理是,在室温条件下,随着水分子含量的增加,形状记忆聚合物的玻璃化转变温度逐渐下降,直到达到吸收饱和的状态[65]. 进而通过红外光谱实验,获得了水及湿气驱动聚氨酯形状记忆聚合物的分子作用微观机制. 实验结果表明含有较强极性氢键的水分子与聚氨酯聚合物中的极性官能团CO 发生强烈的氢键作用,从而降低了聚合物内部官能团N—H 和CO 之间的氢键连接作用,导致聚合物的转变温度降低[29].
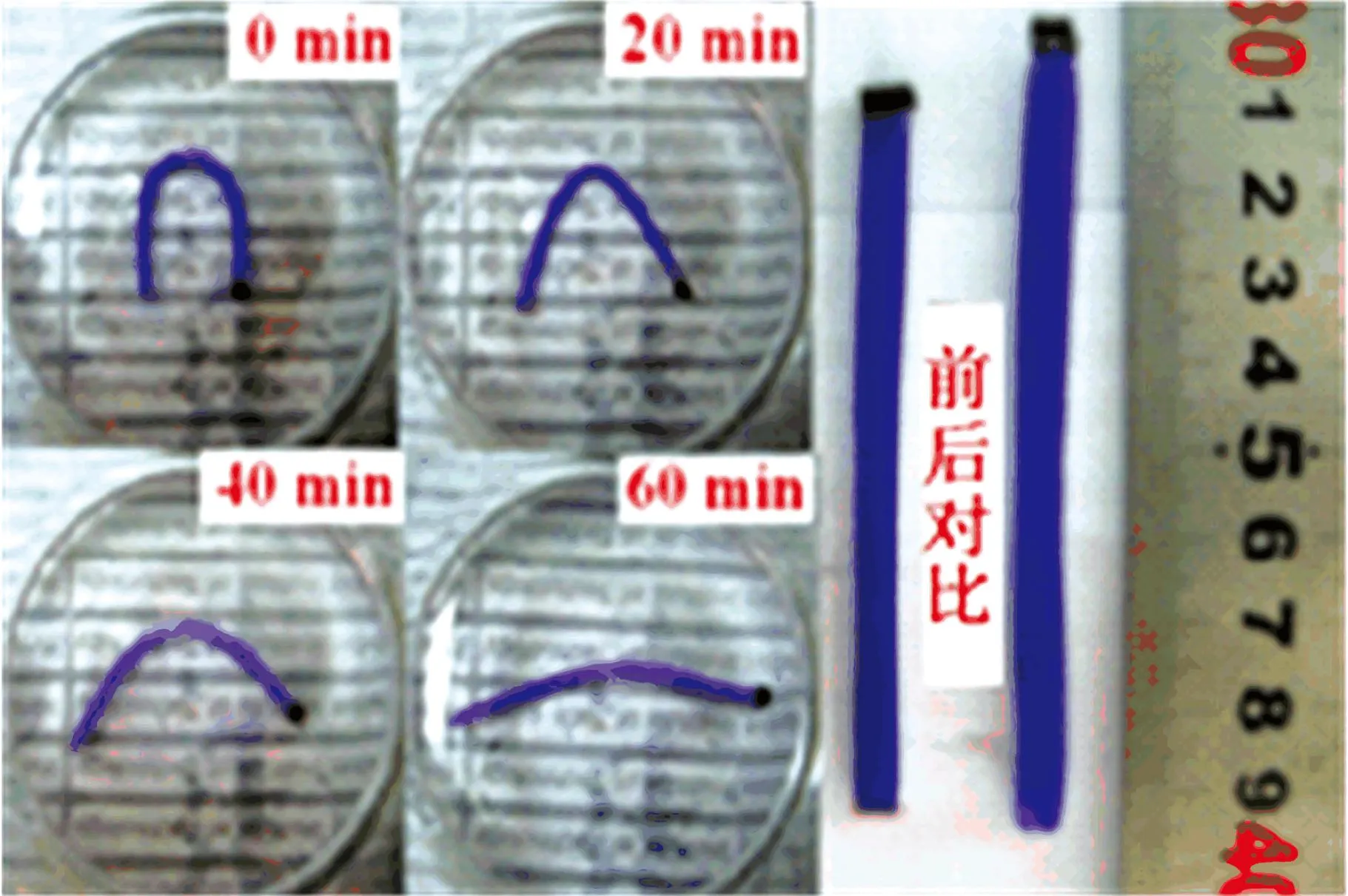
图7 形状记忆聚合物的溶液驱动形状回复过程[29]
Leng等采用化学交联方法制备一种新型的纳米复合材料形状记忆聚合物,该材料具有感受多级刺激的功能,分别能够感受磁、电、温度的变化,通过对形状记忆聚合物施加不同的刺激,形状记忆聚合物不同段能够选择性回复其初始形状,在可控形状回复方面具有非常重大的意义(见图8)[30].
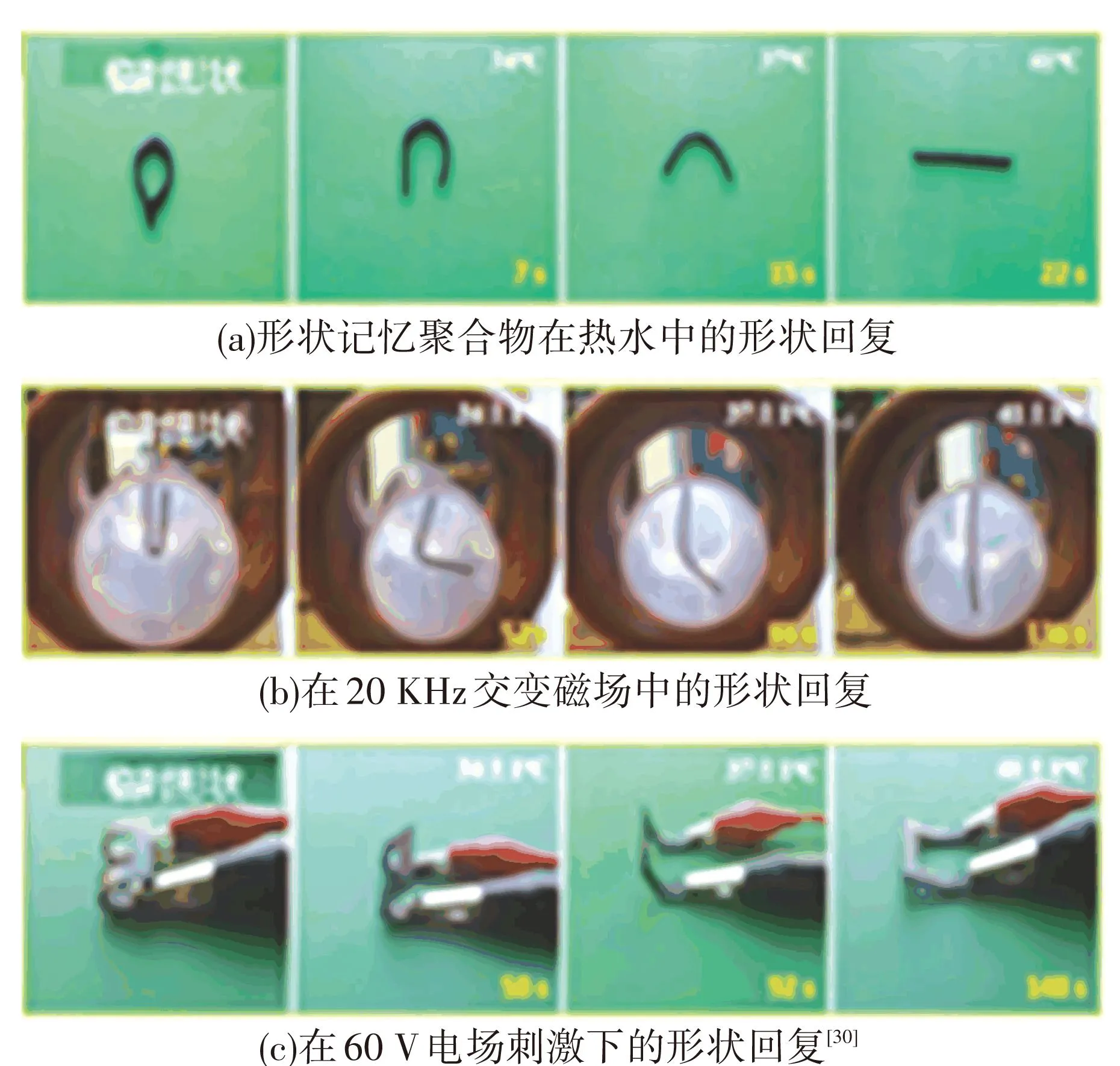
图8 形状记忆聚合物感应不同刺激的回复过程
2形状记忆复合材料的航空航天领域应用研究
近年来,智能结构技术发展较快,尤其是在航天、航空等结构上的应用受到广泛的重视和认可,一些元件已经完成原理性演示验证,并已初步获得应用. 由于形状记忆聚合物智能材料有较好的形状记忆能力与回复能力,且展开过程较为平稳,不会对结构本体产生冲击与振动,因此它的出现极大地提高了航天器的运载能力.
2.1形状记忆聚合物智能材料在航天领域的应用
2.1.1空间可展开机构简介
随着工程要求的不断提高,空间可展开机构的结构和功能越来越复杂,形状记忆复合材料在空间可展开机构领域扮演着越来越重要的角色. 空间可展开机构有多种分类方式,按展开形式可分为如下几种类型:折叠式空间可展开机构、套筒式空间可伸展机构、桁架式空间可伸展机构和充气式空间可展开机构.
2.1.1.1折叠式空间可展开机构
多数折叠式空间可展开机构的展开与锁定都是通过铰链来实现. 随着新材料技术的发展,用形状记忆聚合物智能材料代替传统的动力源实现机构的自我展开与锁定已成为现实. 最典型的折叠式空间可展开机构是展开式太阳能帆板机构,除美国、日本、俄罗斯等国家已经掌握了多次展开技术,我国也已经实现机构的二维三维展开,取得重大的技术突破. 2.1.1.2套筒式空间可伸展机构
套筒式空间可伸展机构一般通过螺旋传动系统传动,当需要较高的传动效率时,大多采用滚动螺旋传动的工作方式,其优点是在展开后具有较好的刚度强度(见图9)[31].
2.1.1.3桁架式空间可伸展机构
桁架式空间可伸展机构一般可分为两类,即构架式空间可伸展机构和桁架式天线可展开机构. 其中构架式空间可展开机构又可分为两类:压盘杆展开机构和铰链杆展开机构. 压盘杆展开机构用弹性杆件,以周向盘旋方式进行收拢. 美国ASTRO公司提出的Astromast压盘机构是压盘杆展开机构的典型代表 . 铰链杆展开机构则采用刚性杆件以向心折转或侧向倒伏方式进行收拢,典型代表有美国ABLE公司研制的FAST铰链杆展开机构(见图10)[32].
(a) 收缩状态 (b) 展开状态

(a)压盘杆展开机构 (b)铰链展开机构
图10构架式空间可展开机构[32]
2.1.1.4充气式空间可展开结构
充气式可展开结构相较于其他空间可展开结构具有收藏后体积小、重量轻,安装简易,展开后精度高等优点. 一般都采用薄膜结构,先折叠放置于太空舱内,待发射到达指定位置后再充气形成需要的反射面型. 因其特殊的结构和材料要求,充气式空间可展开结构的发展还面临着诸多挑战(见图11)[33]. 2.1.2基于形状记忆聚合物的空间可展开结构
如图12(a)所示是由美国CTD公司研究开发的一种电加热驱动型形状记忆复合材料EMC(Elastic Memory Composite)铰链[34]. 目前, EMC铰链已被开始应用于航天器上,例如美国空军学院研制的“FalconSat-3”航天器、美国“DiNO Sat”卫星的太阳能电池帆板. 哈尔滨工业大学研制了SMPC铰链,见图12(b)[1-5, 35]. 该铰链已经应用于太阳电池板的驱动展开地面模拟试验中,见图13[1, 35].

图11 充气式空间居住舱[33]

(a)美国CTD公司开发EMC铰链
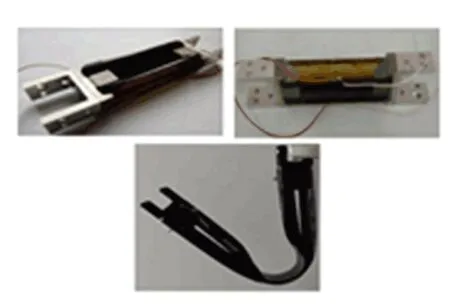
(b) 哈尔滨工业大学研发的SMPC铰链
CTD公司设计基于形状记忆复合材料的双纵梁桁架结构(见图14(a))和三纵梁桁架结构以满足FalconSat-3微型卫星对梁的集中程度高、机械性能简单要求,见图14(a)~(b)[1, 36]. 其中形状记忆复合材料三纵梁桁架结构由3个纵向间隔120°的半圆柱状的形状记忆复合材料梁构成. 收缩状态时3个纵向的形状记忆复合材料梁以S型折叠收缩,当在轨工作后,通电加热形状记忆复合材料梁,实现其展开过程. 与三纵梁桁架结构展开机理类似,双纵梁桁架结构同样以S型折叠收缩,当在轨工作后,通电加热形状记忆复合材料梁,实现其展开过程.
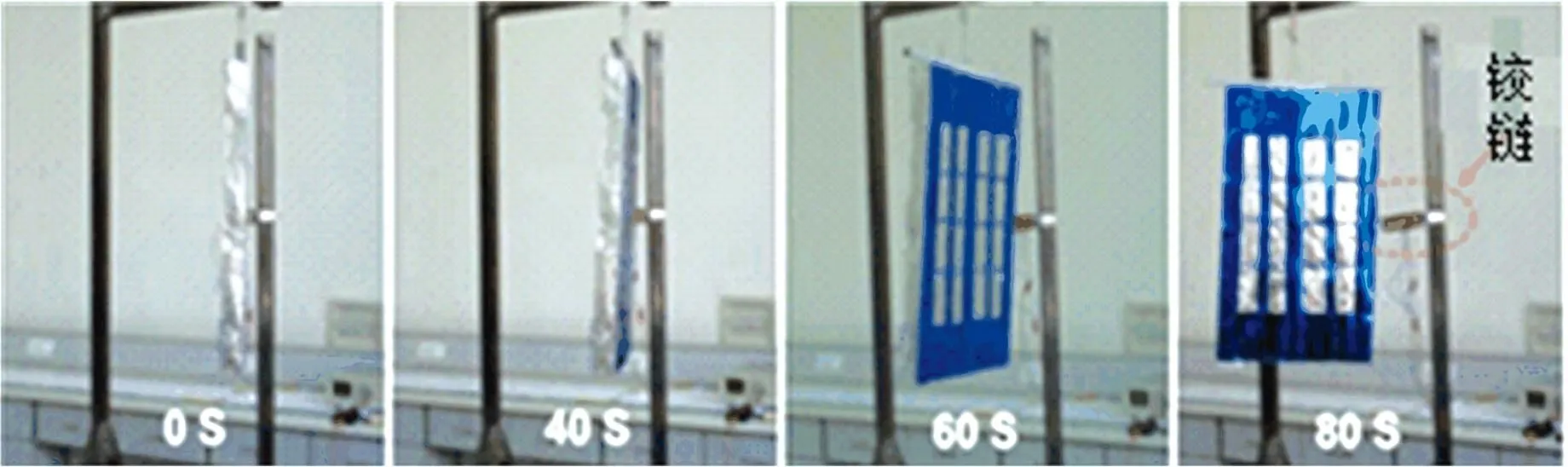
图13 铰链驱动的太阳电池板地面模拟试验 [1, 35]
如图14(c)所示,哈尔滨工业大学研制一种形状记忆聚合物复合材料的可展开桁架,该桁架由18片圆弧截面的复合材料层合板、可伸缩的中心支架、轴承等主体构成,桁架设计为6级展开,每级为间隔120 ℃的3个层合板片材. 展开实验前桁架以M型折叠收缩,对桁架通电加热,桁架能够在120 s内完全展开.
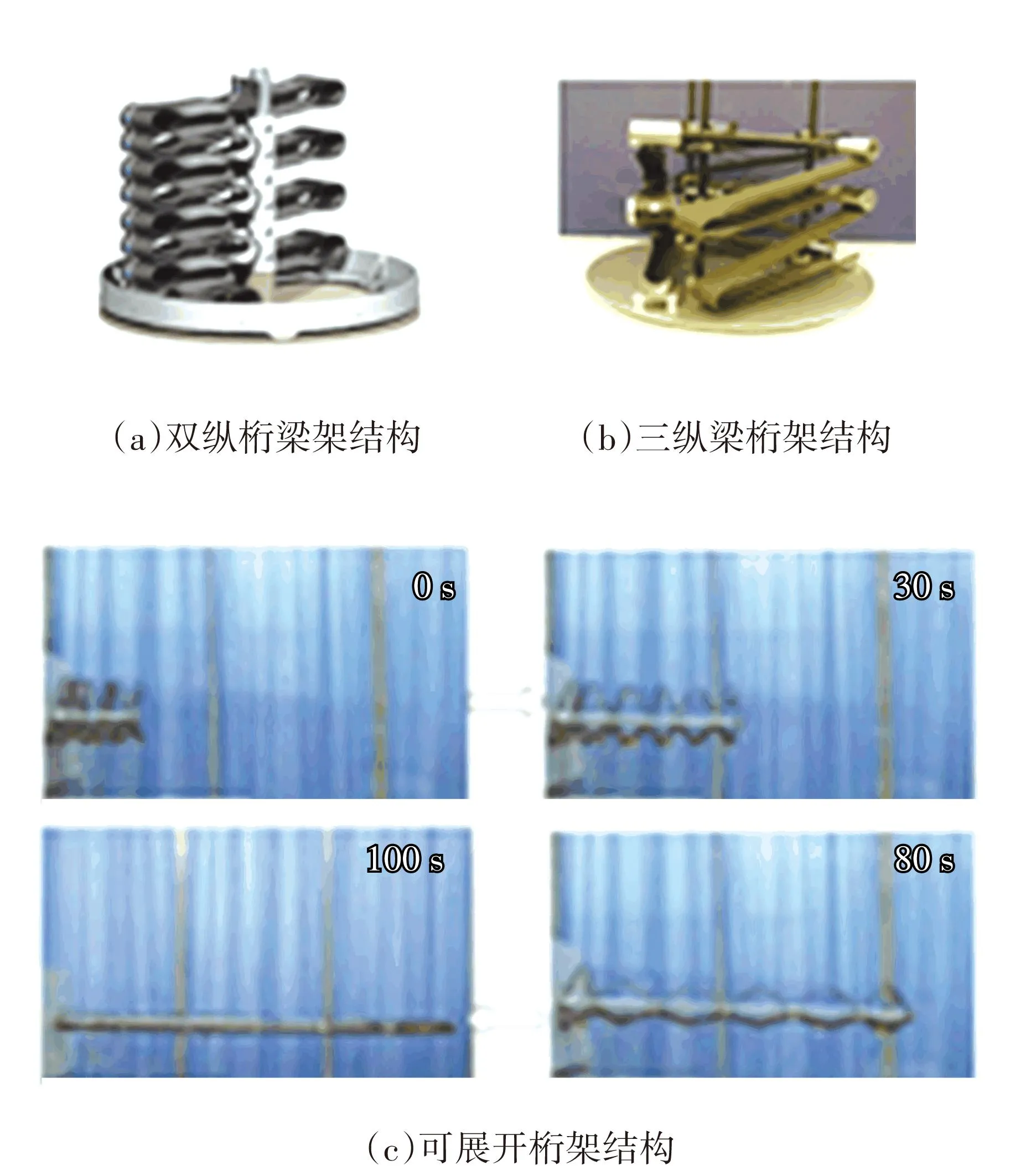
图14 形状记忆聚合物展开梁和桁架结构[10,36]
DSX/PowerSail (Deployable Structures Experiment)计划研制新一代的大面积、轻质、高效率的太阳能电池帆板( 见图15(b)). 计划使用能够纵向延伸的卷曲管状形状记忆复合材料展开梁(见图15(a))来驱动该卫星的柔性太阳能电池板的展开. 通过驱动两边缘的卷曲管状形状记忆复合材料梁展开,太阳能电池板随之展开[1, 37].
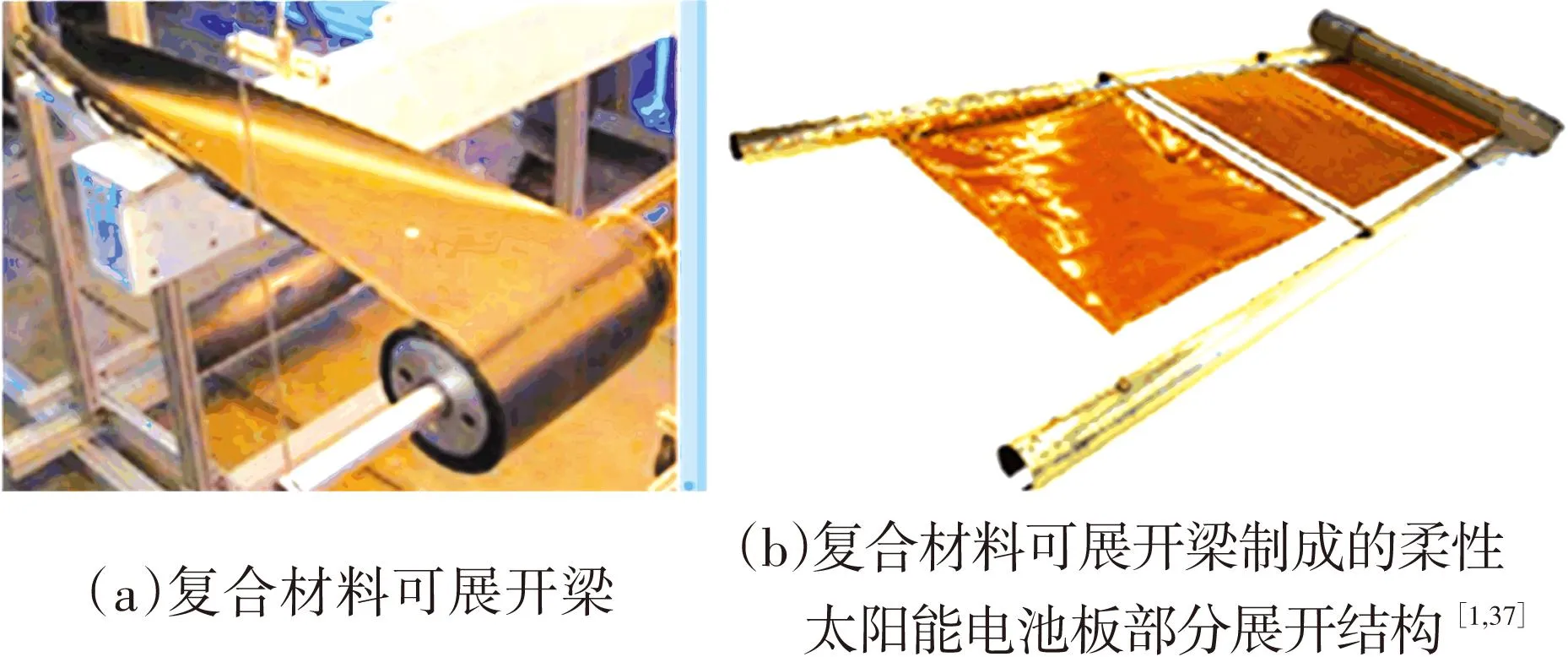
图15 形状记忆聚合物复合材料可展开梁
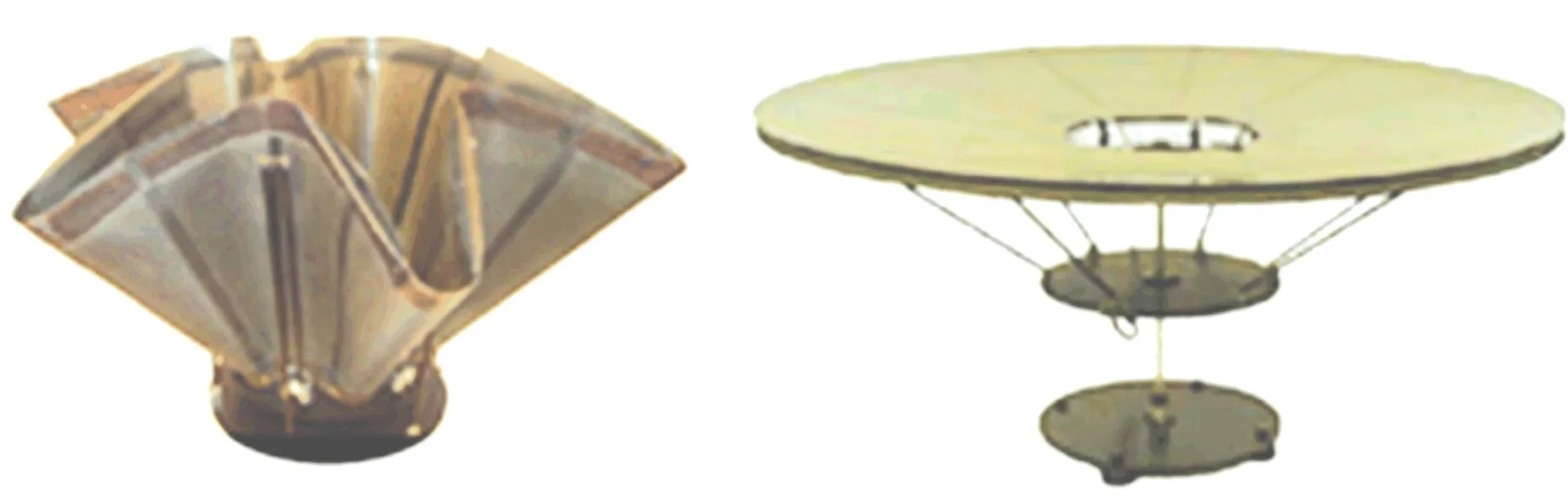
如图(16)所示,形状记忆可展开天线为旋转抛物面型天线反射面,由美国CTD公司开发. 该天线的反射面可收缩折叠成伞型结构. 与形状记忆固体表面可展开天线反射面对应的背架支撑结构,与一般网状可展开天线相同[1, 38].
美国CTD公司还开发一种由条状形状记忆聚合物复合材料件支撑的天线反射面. 该天线反射面背面的上下边缘处各固定连接有条状形状记忆聚合物复合材料的环向加强件(见图17)[1, 39].
(a)折叠状态 (b)展开状态
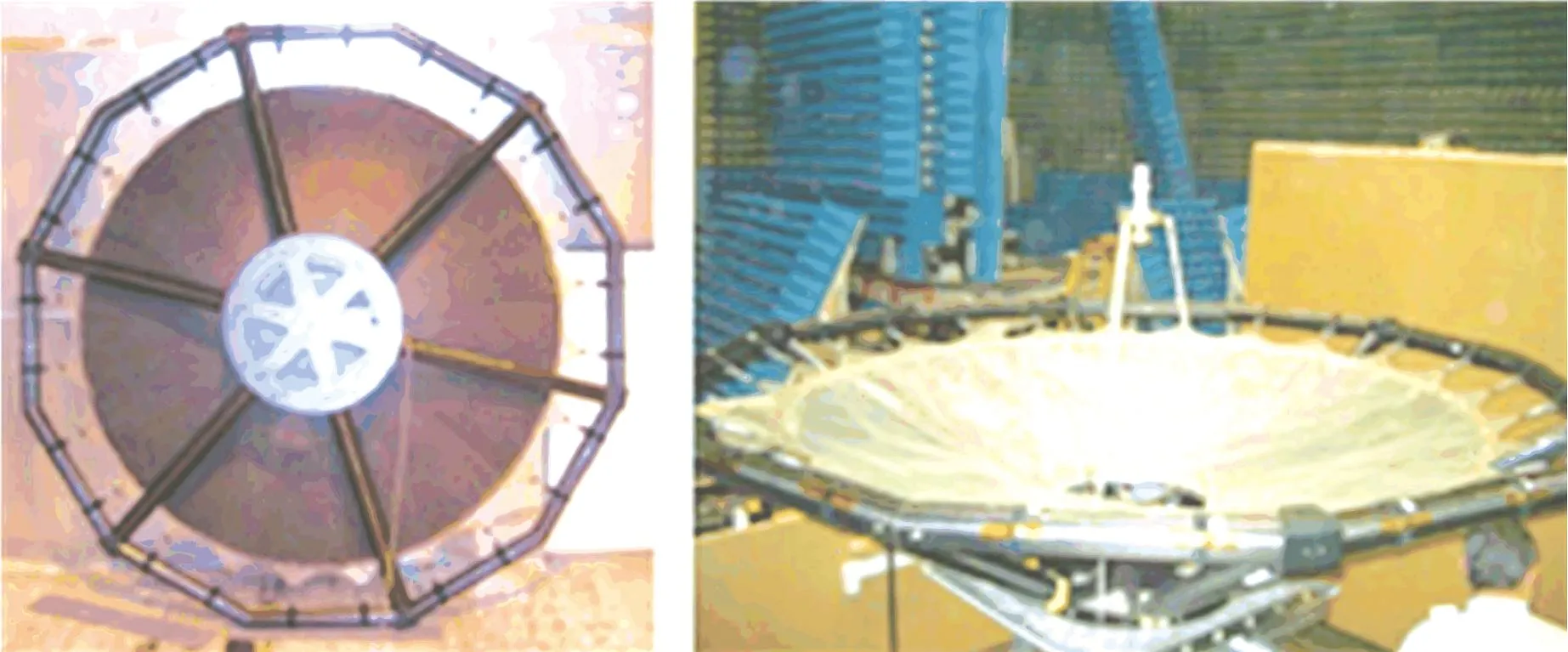
图17 形状记忆聚合物复合材料支撑管天线[1, 39]
目前,NASA(美国航天局)在ESTP项目中正在开发一种直径35 m,工作频率为35 GHz的新型卫星天线(见图18). 由于其展开过程像花瓣打开一样,因此被称为“太阳花”天线[40].
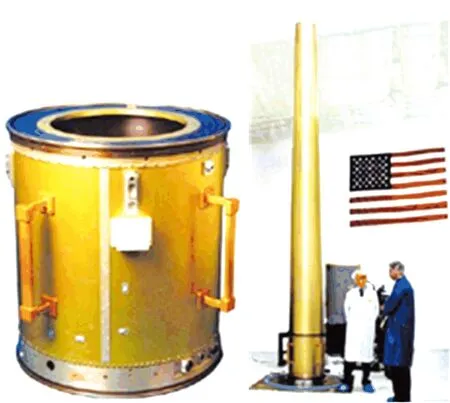
针对探月工程,美国ILC Dover公司联合航空航天局兰利研究中心LaRC(NASA Langley Research Center )设计和制备了一个充气可展开月球居住站[41]. 此居住舱的框架全部采用形状记忆聚合物复合材料,由此实现了结构的可折叠和充气热展开,实现了以较小的发射体积获得较大的使用体积. ILC Dover公司制造空间自展开月球居住站典型样件(见图19),并进行模拟空间失重环境下的展开验证实验.
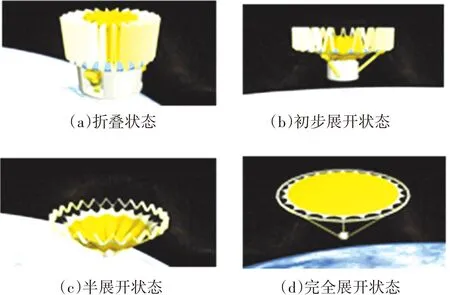
图18 “太阳花”天线 [40]
哈尔滨工亚大学Leng提出一种基于形状记忆聚合物的框架式空间可展开结构(见图20),该结构包括多个立方体连接端部和多个形状记忆聚合物可伸缩单元,形状记忆聚合物可伸缩单元的两端分别与立方体连接端部的一个面连接,进而形成析架式的立方体式空间可展开框架,通过加热元件加热形状记忆聚合物片层,形状记忆聚合物片层加热后变形伸展,从而来带动伸缩套筒发生伸长变形,伸缩套筒伸长后实现立方体式空间可展开框架结构的展开. 该结构简单可靠,稳定性高,结构展开所需驱动力较小,过程比较平稳,对系统的冲击小,尤其避免了展开开始瞬间和锁紧末期剧烈的冲击载荷,为解决空间可展结构在太空中存在的机械结构复杂、展开难度高、不易操作、不稳定、易受冲击损坏、成本高的问题提出新的思路.
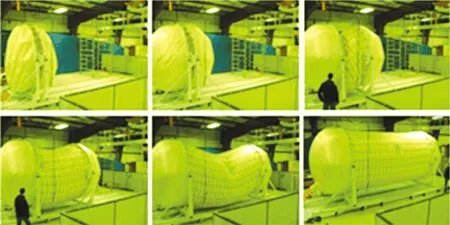
图19基于形状记忆聚合物复合材料的空间自展开月球居住站的展开过程[41]
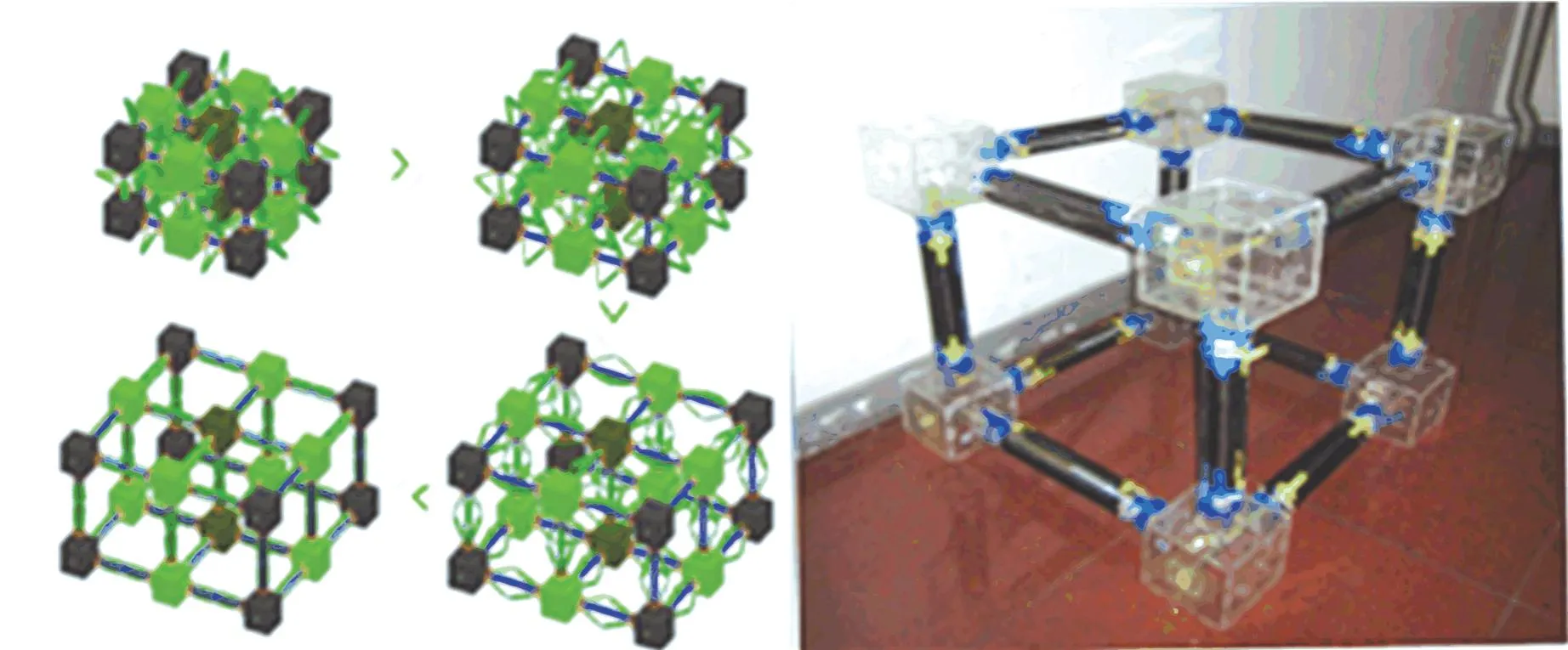
(a) 框架式空间可展开结构的 (b) 框架式空间可展开结构的
软件建模模型实物模型
图20基于形状记忆聚合物复合材料的立方体空间可展开结构
低成本的,轻质的,大口径的光学反射面在未来的太空探测中是一个发展趋势,为此,不同的材料制备技术和结构组成是被研究和改进,以达到良好的光学性能. 如图21基于地面控制的可展开反射镜,应用形状记忆复合材料蜂窝夹层结构作为光学反射器的反射面支撑材料[42].
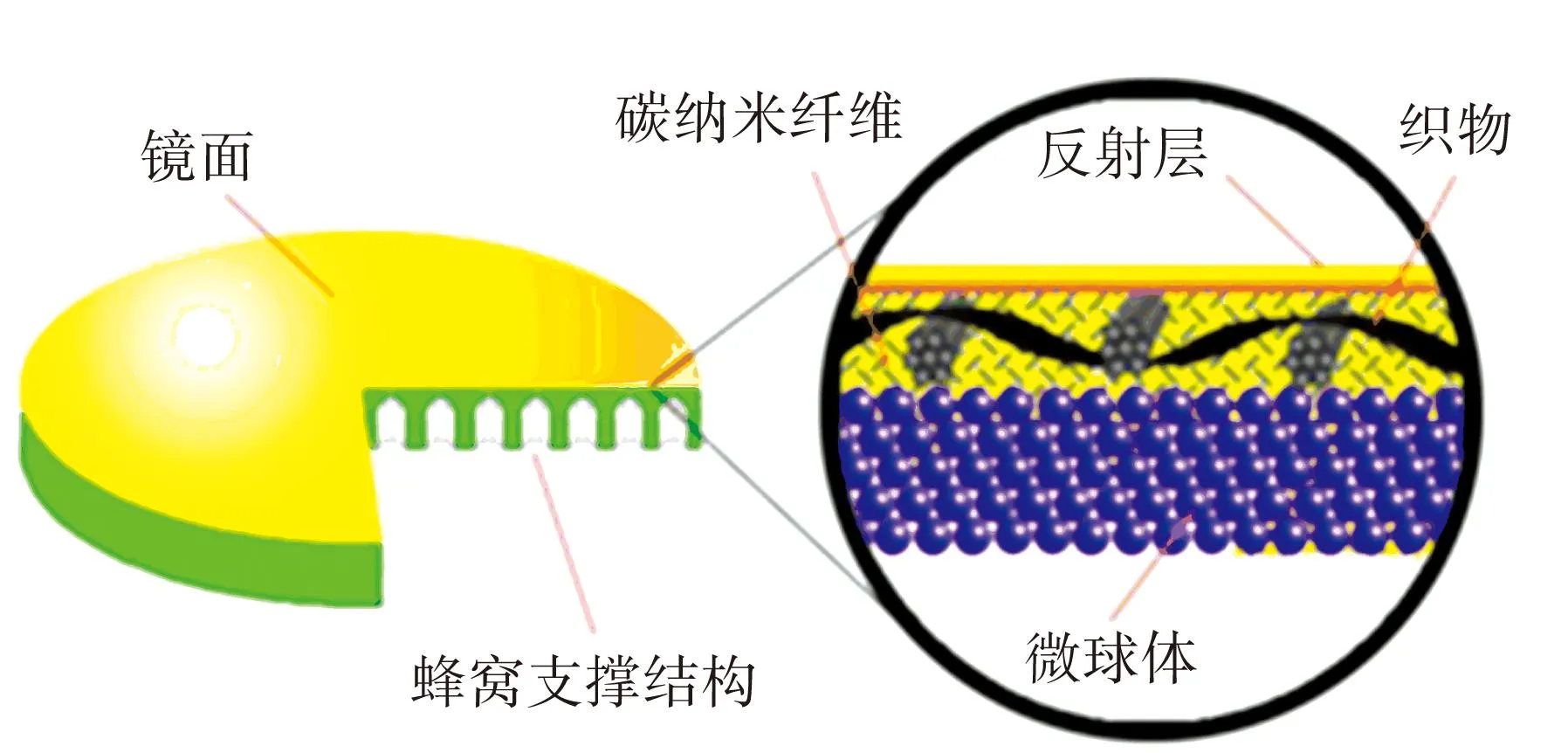
图21 形状记忆复合材料可展开光学反射器[42]
2004年,Varlese等发展一种以SMPC为基体的光学反射面,该反射面以碳纤维增强型氰酸酯基SMPC为基体,以0.02 mm厚的镍粉薄膜为表面层. 该基体可为反射面的表面形态提供良好的刚度和强度;该镍表面层又拥有较低的表面应力和柔性的刚度,这个结构在高温下,可人工蜷曲,便于储存,当工作时,在高温的驱使下,可再次自动展开,回复初始的反射面形态,展开过程见图22[43].
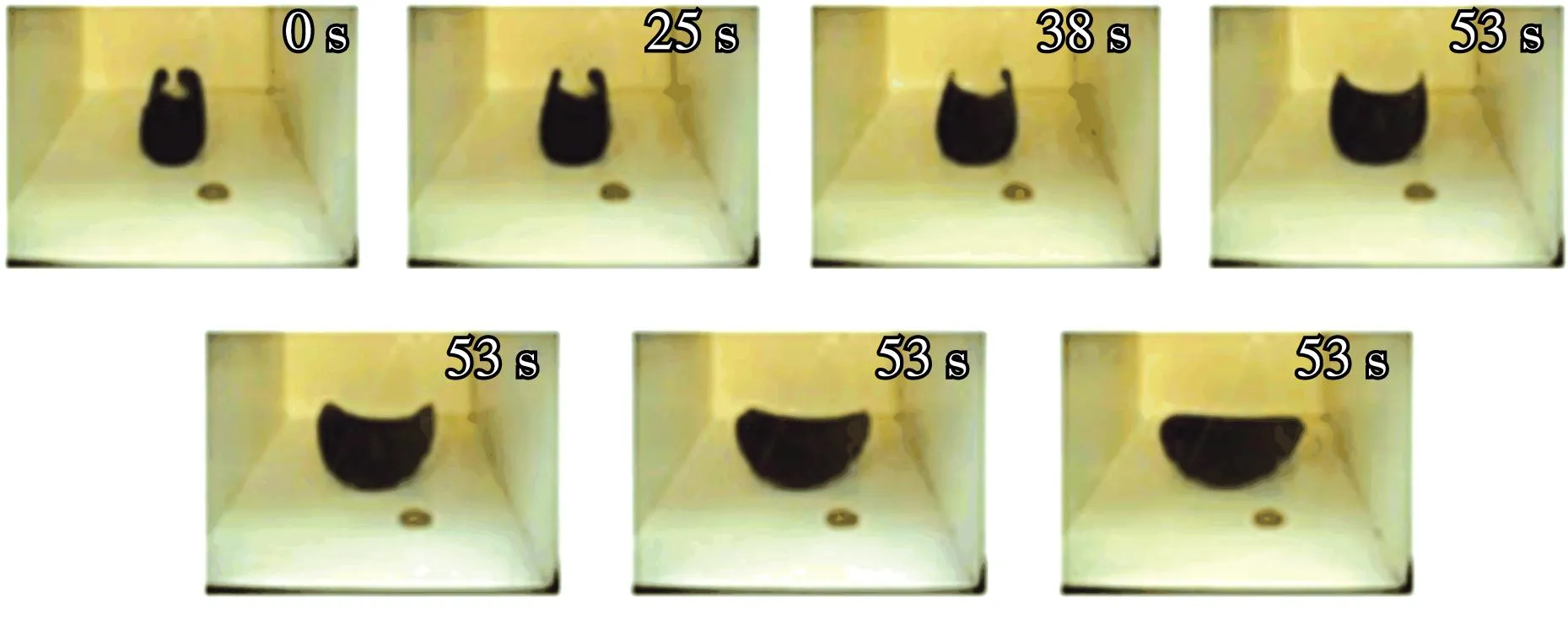
图22 SMPC 光学反射面展开过程[43]
此外,哈尔滨工亚大学Leng等基于形状记忆聚合物的特点,设计并优化结构,探索研制形状记忆聚合物释放机构,来代替爆炸螺栓完成对空间结构的释放. 提出应用形状记忆复合材料轻质、高效能、简单的特点及其记忆特性,探索研制新一代空间展开形状记忆聚合物释放结构,减小在展开过程中对航天器空间展开结构产生的冲击,减轻展开部件的质量及简化结构来适当的降低其振动频率,从而保证主要部件的安全与稳定. 提出的大承载压缩型复合材料释放机构具有较高的结构抗拉强度,并且该结构可在加热过程中几乎完全恢复到初始的直筒形态,结构具有良好的解锁能力. 图23为大承载释放机构锁紧和释放示意.
2.2形状记忆聚合物智能材料在航空领域的应用
形状记忆聚合物复合材料还能应用于可变形机翼的蒙皮结构[44]. 洛克希德·马丁公司提出“折叠机翼”变形的概念,利用无人机作为验证平台,将其机翼设计为折叠式,折叠接缝部位采用形状记忆聚合物材料,以保证机翼由折叠状态展开后产生平滑的表面(见图24)[45]. 针对折叠可变形机翼结构,洛克希德·马丁公司利用形状记忆聚合物研制了两种折叠翼无缝蒙皮(见图25)[46],将其用于折叠部位的缝隙处. 该蒙皮通过镍镉合金丝加热实现蒙皮从玻璃态向橡胶态转化,改变其刚度以满足变形条件,但是在多次热-机械循环载荷作用下镍镉合金丝折断,导致形状记忆聚合物无缝蒙皮破坏失效,该公司指出:解决了蒙皮加热问题,该蒙皮将有极大的应用潜力.

图23 大承载释放机构锁紧和释放
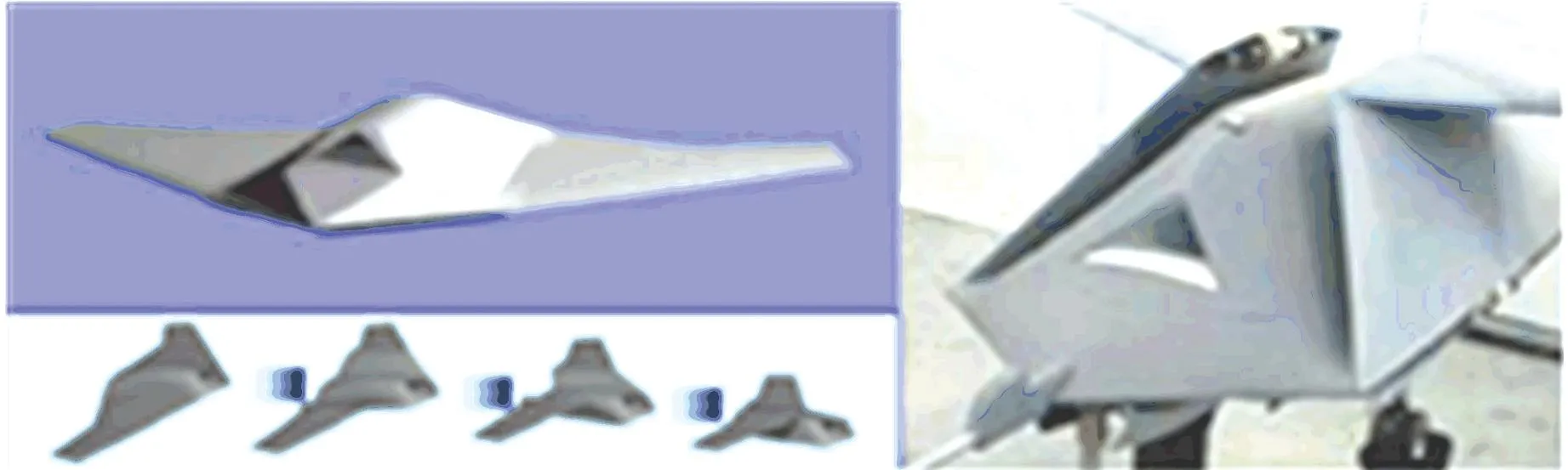
图24 可变形飞行器的折叠机翼 [45]
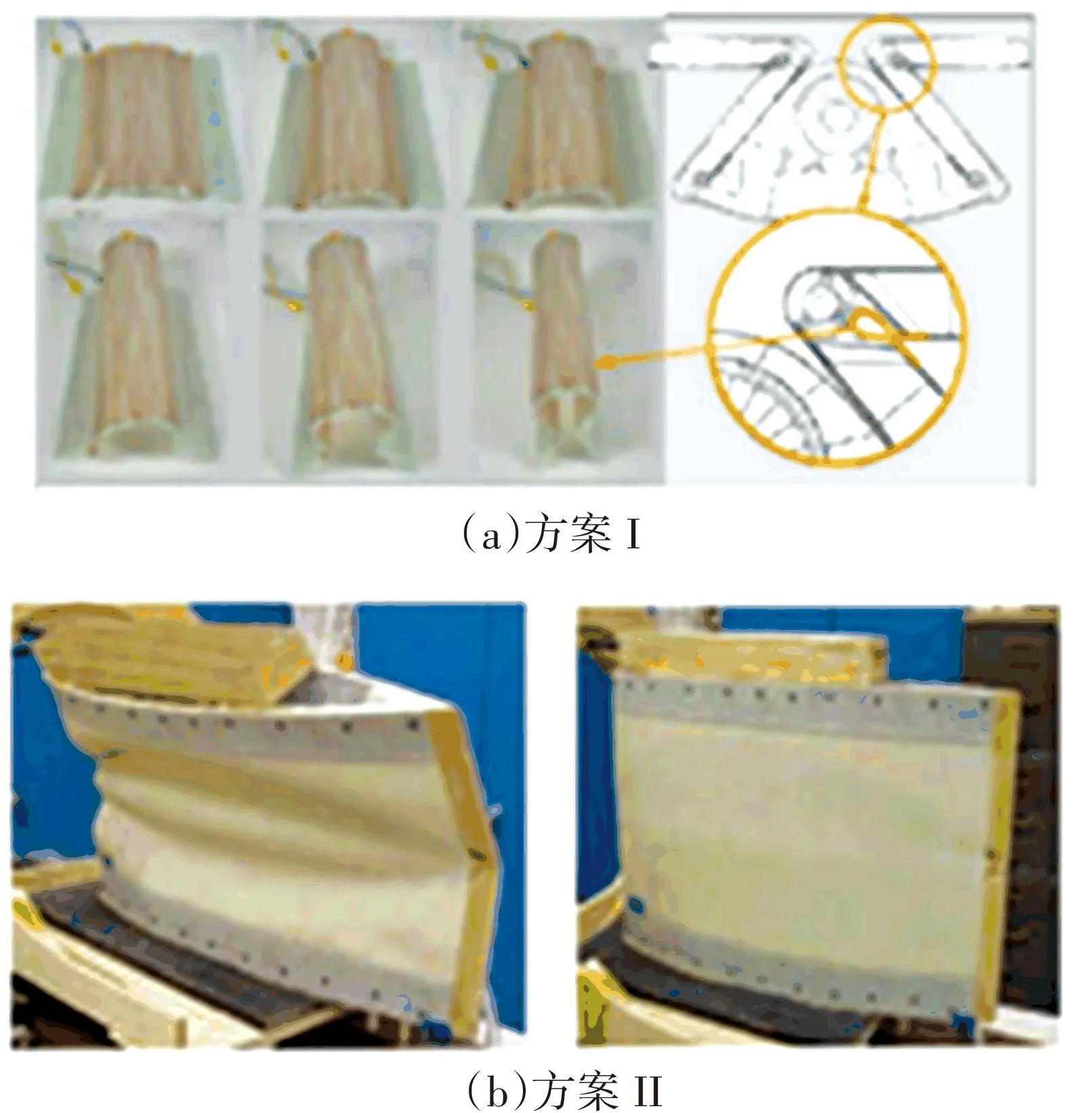
图25 折叠机翼的形状记忆聚合物蒙皮概念[46]
哈尔滨工业大学将弹性纤维加入到热固性形状记忆聚合物中,大大增强了形状记忆聚合物的使用安全性,并将其用于可变形后缘机翼结构,制备成无缝舵面,推迟气流分离,提高升阻比,提高隐身性能. 针对可变形机翼蒙皮的需求,哈尔滨工业大学还制备了一种基于形状记忆复合材料变刚度管的柔性基体蒙皮见图26,该蒙皮利用形状记忆聚合物的变刚度特性,使蒙皮即具有承载能力,又具有变形能力[47].

图26 基于形状记忆聚合物复合材料的无缝蒙皮[47]
此外,哈尔滨工业大学的研究人员还提出一种可展开的机翼结构[48],该机翼以形状记忆聚合物SMPs(shape memory polymers)作为蒙皮材料,由形状记忆聚合物泡沫制成机翼的翼型. 在飞行器起飞前,为节省运输和发射空间,机翼被卷曲在机身上;飞机起飞后对机翼加热能够使其平稳展开(见图27);待机翼完全展开后继续对其加热,内部填充形状记忆聚合物泡沫也恢复原有形状以形成翼型,回复率近 100%(见图28);降温后,整个机翼就完成展开和定型.
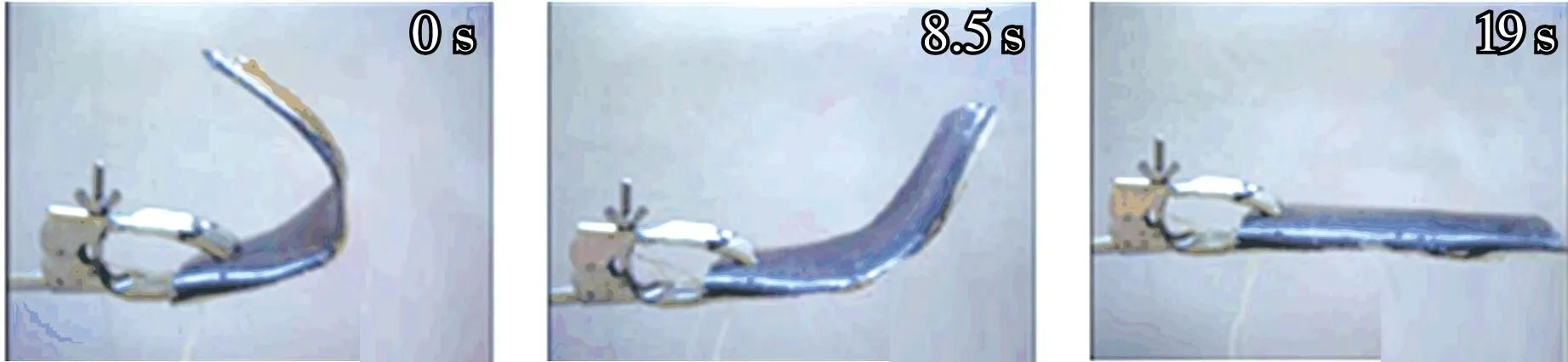
图27 基于形状记忆聚合物的可展开蒙皮结构[47]
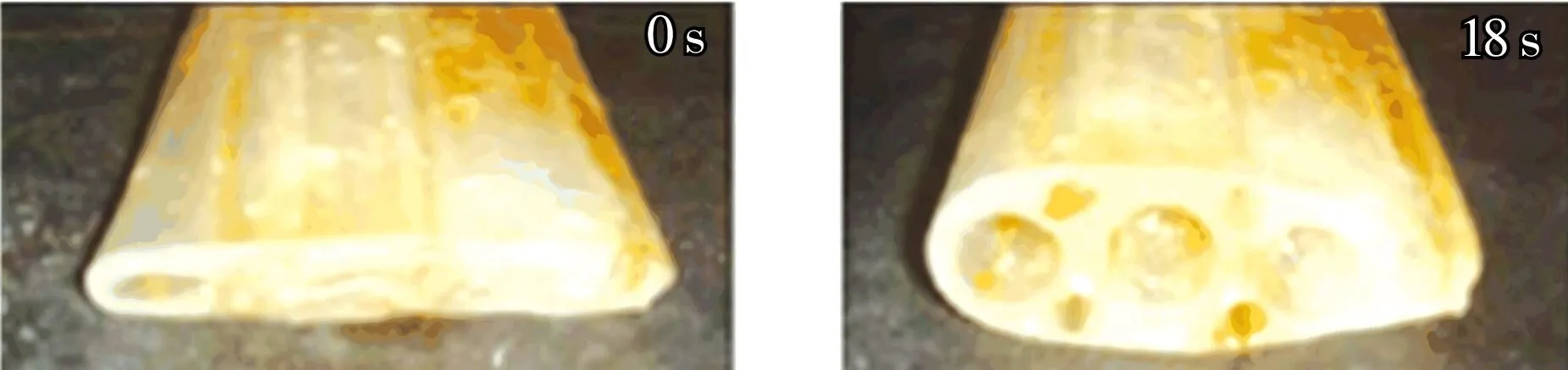
图28 形状记忆聚合物泡沫机翼填充结构[47,48]
美国 CRG 公司(Cornerstone Research Group, Inc.)提出一种可变弦长机翼结构[49](见图29). 该机翼结构的金属肋可相互滑动从而可变机翼弦长,机翼内其余部分由形状记忆聚合物泡沫填充,对其加热后机翼可变形,温度降低后泡沫结构可提供足够的承载能力;该变形机翼的蒙皮结构采用折叠形状记忆聚合物薄板制成,通过热刺激使蒙皮逐渐展开,覆盖整个机翼表面.
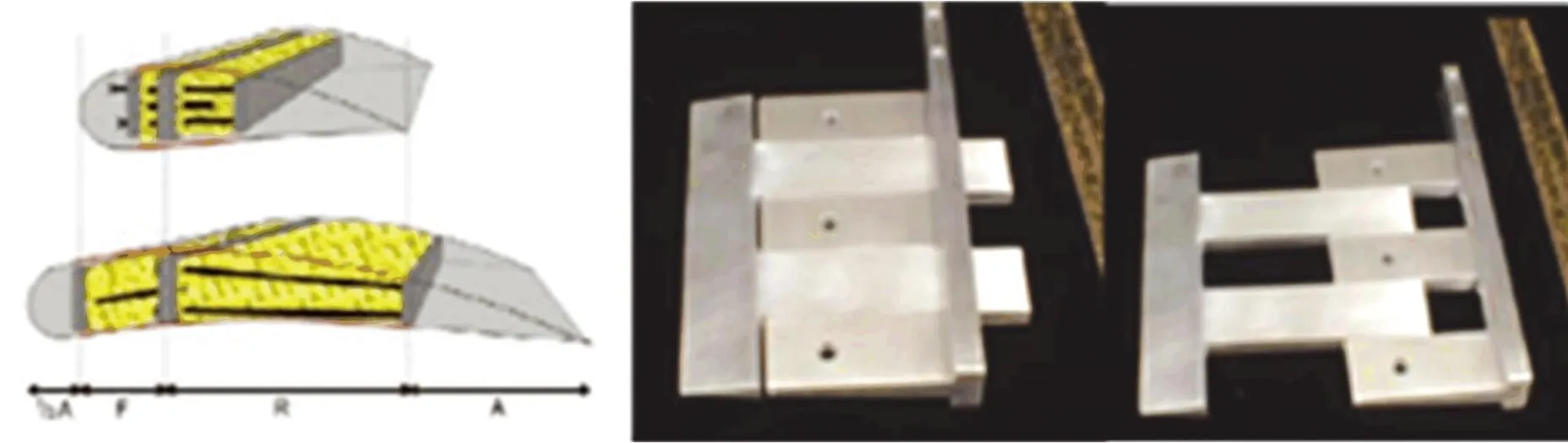
图29 滑动肋机翼结构 [47,49]
美国新一代航空公司与美国空军研究实验室合作提出了另一种变形蒙皮方案,即将形状记忆聚合物蒙皮作为剪切变形蒙皮[50](见图30). 通过大量的拉伸、剪切及温度循环加载等力学性能测试,证实可变刚度的形状记忆聚合物材料兼顾了变形和承受载荷两方面的能力,但是在热循环加载试验过程中,材料与卡具的连接位置容易破坏,且有部分形变未能完全恢复到初始状态,影响了其安全使用.

图30 形状记忆聚合物剪切蒙皮性能试验[47,50]
哈尔滨工业大学的研究人员也对形状记忆聚合物蒙皮结构进行了一系列的研究,并将其用于变后缘弯度机翼上[51],变形结构(见图31). 通过给预埋的加热丝通电,加热形状记忆聚合物蒙皮,降低了蒙皮结构的刚度以满足机翼变形条件. 在加热状态下,机翼后缘可实现快速、光滑连续的变形,变形角度达到+15°. 通过风洞实验证实,连续无缝的后缘可有效减缓气流分离,提高升力系数,提高机翼的升阻比.
(a)0°状态 (b)15°状态[47]
3介电弹性体电活性聚合物
3.1电活性聚合物
电致活性聚合物作为一种新型的功能材料,当其在受到外加电场作用时能够改变形状或体积,撤掉外加电场之后,又能恢复成原来的形状或体积. 利用介电弹性体材料的这种特性,可用来设计和制造基于介电弹性体体材料的智能转换器件,如介电弹性体驱动器、介电弹性体传感器以及介电弹性体能量收集器等[52, 53-57]. 电活性聚合物材料与压电、铁电材料相比,介电弹性体材料具有的变形大和质量轻等特点,是一种具有重大应用前景的智能多功能软物质材料[58-77].
按照其作用机理不同,EAP主要分为电子型和离子型[54-70]. 电子型EAP材料主要包括介电弹性体DE(dielectric elastomer)、铁电聚合物(ferroelectric polymers)、碳纳米管(liquid crystal elastomers)等. 离子型EAP材料主要包括离子聚合物金属复合材料IPMC(ionic polymer-metal composites)、碳纳米管(carbon nano tube)和导电型聚合物(conductive polymers)[54-57]. 表1列举出生物肌肉和典型EAP材料的主要性能. 碳纳米管可分为单壁纳米管和多壁纳米管两大类,并且其力学性能非常突出,弹性模量高、抗拉强度和机械强度较高. 而且还具有热稳定性高的特点,在高温下的性能超过其它EAP材料[61,75-77]. 电致流变液体由介电颗粒悬浮于载液中组成. 在外电场作用下,介电颗粒发生极化并沿电场方向结成链状结构,致使流体的流变性能发生突变,从自由流动的液体变为类似凝胶状的固体[56]. 它具有响应迅速、性能稳定等优点. 离子聚合物凝胶体在电场作用下,氢离子进出时被聚合链上带负电离子吸引或排出引起形状变化. 凝胶可产生与生物肌肉相当的力和能量密度,驱动性能优异[57].
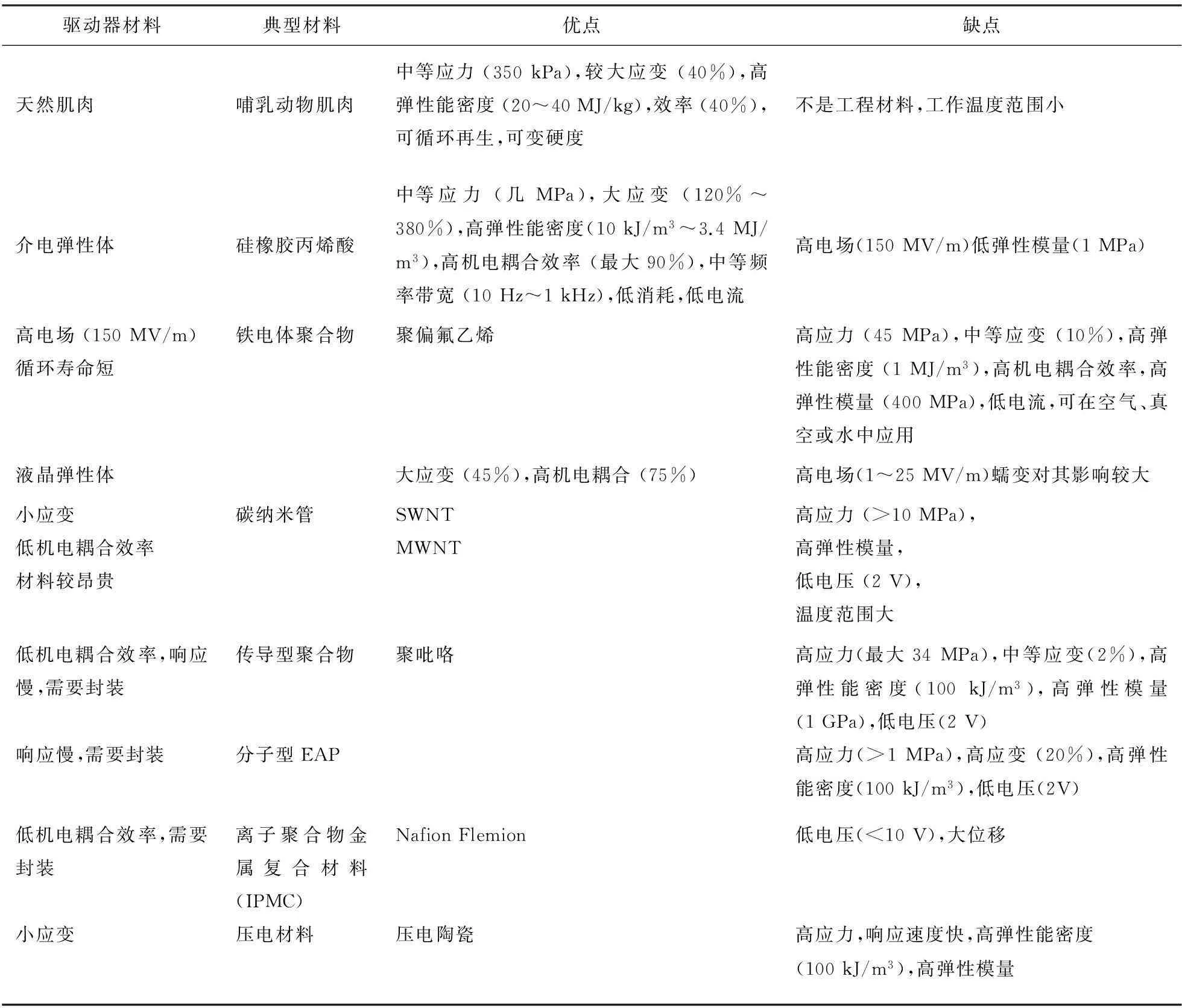
表1 生物肌肉和EAP材料的性能比较[57]
电子型EAP材料需要很高的驱动电场(>100 V/μm)以保证其产生一定的电致变形,该电场接近材料的击穿电场[54-55]. 离子型EAP材料由电极和电解液组成. 为保证其正常工作,需保持其表面湿润和周围环境湿润[56-57]. 这类材料在较低电场下就可以产生稳定的伸长、缩短或弯曲等响应[58].
总之,EAP材料是一种具有重大发展潜力的智能多功能材料,它具有的大变形、高机电转化效率、快速响应、质量轻、极佳柔性和回弹性等的优点[59]使得介电弹性体材料应用于驱动器浮空器飞艇舵、固态飞行器等各个方面,在航空航天和机械工程等领域显示出巨大的应用潜力[60-77].
3.2介电弹性体及其复合材料
3.2.1介电弹性体
介电弹性体属于电子型EAP材料,通过外加电场的刺激,可产生大的形变,具有高弹性能密度、超短反应时间、质量轻等特点[78,53-68]. 硅橡胶和丙烯酸是最常见的介电弹性体[53-57,62-68]. 表2列举出硅橡胶和丙烯酸材料性能的比较.
在介电弹性体两个相对表面均匀涂覆柔性电极,对其两端施加电压时,弹性体的厚度的减小,面积的扩大[52,53-77]. 图32是电压驱动介电弹性体的原理图,由于在电极上施加电压,上下两层电极上的异性电荷相互吸引导致薄膜将产生明显的面积和厚度变化.
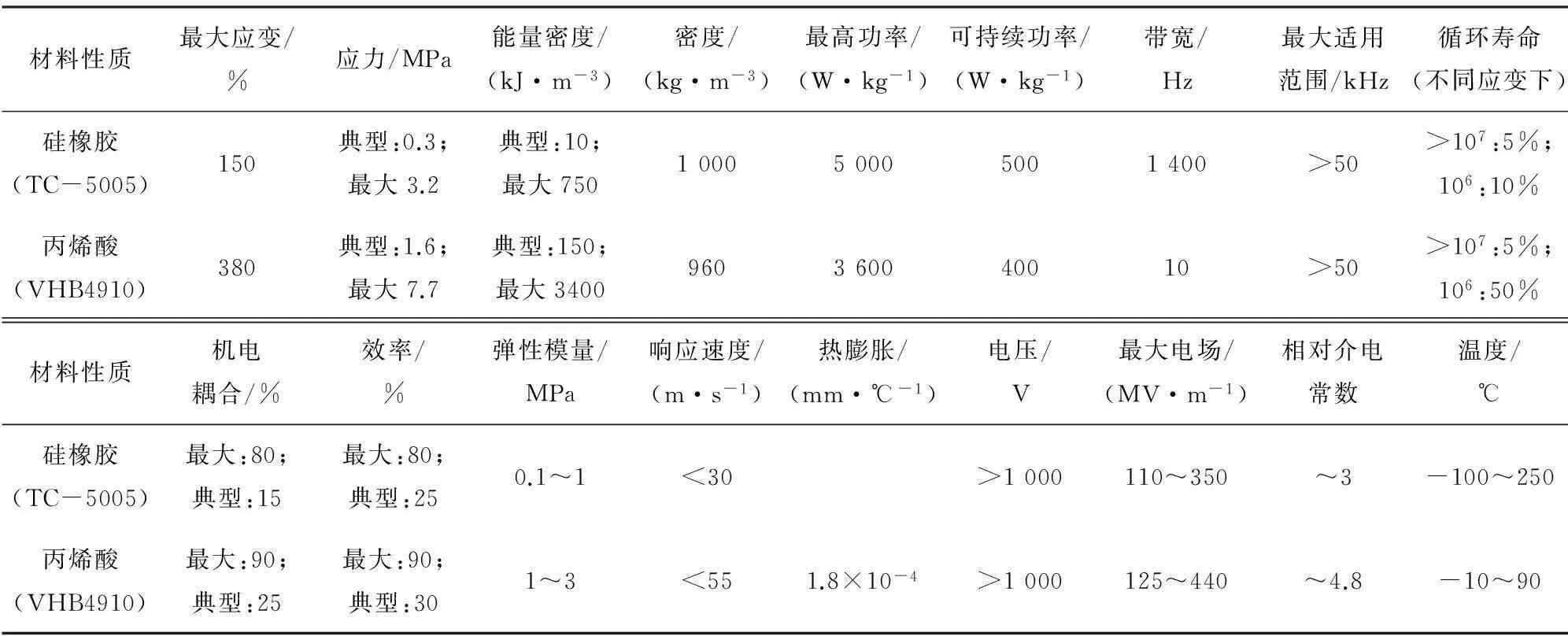
表2 硅橡胶和丙烯酸性能的比较[56]
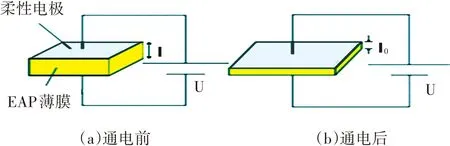
图32 电压驱动介电弹性体的原理[53]
3.2.2介电弹性体复合材料
由于介电弹性体的驱动电场与其击穿电场属于同一数量级,这个缺点大大的限制了它在商业上的应用. 研究人员通过制备介电弹性体复合材料来改善形状记忆聚合物的性能来解决这一问题[53,54,79-81].
制备高性能的介电弹性体复合材料大体上通过两种方法,一种是采用物理共混的方法来制备颗粒填充或者聚合物填充的硅橡胶复合材料,另一种是基于化学交联方法来制备丙烯酸互穿网络型的介电弹性体.
通过物理共混的方法获得介电弹性体复合材料主要通过以下3种不同的机理. 第一种是填充高介电常数的铁电陶瓷颗粒,比如钛酸钡,铌镁酸铅(PMN-PT)等等. 复合材料的介电常数和弹性模量均随着填充颗粒含量的增加而增加[81]. 这种复合材料所需的驱动电场较低,而且在同一电场情况下,具有较高的驱动力. 第二种是如碳纳米管的导电颗粒. 介电弹性体中的颗粒在外加高电场的作用下产生极化,提高了聚合物的介电性能,降低了所需要的驱动电场,而且还提高了复合材料的力学性能,比如提高弹性模量和驱动力等[54]. 第三种是填充一种高极性的共轭聚合物,比如PHT [poly(3-hexylthiophene)]等[53,79]. 与上面所述的颗粒填充型介电弹性体复合材料相比,此种复合材料具有高的介电常数和较低的弹性模量,更容易产生大的电致变形.
Ha等制备出性能优异的互穿网络丙烯酸介电弹性体材料[80]. 通过在丙烯酸内部网络中引入第二种聚合物的网络使介电弹性体薄膜在脱离刚性支撑情况下保持预拉伸状态. 常用的第二种聚合物材料包括TMPTMA(trifunctional trimethylolpropane trimethacrylate) 和HDDA(hexandiol diacrylate). 具体的制备过程是,首先对丙烯酸薄膜进行预拉伸并固定在刚性框架上,然后将TMPTMA或HDDA均匀的喷洒到薄膜上,溶剂聚合后将在薄膜内形成第二种网络结构. 最后,把薄膜从刚性框架取下,形成的第二种网络结构将使其保持在预拉伸状态. 研究表明,互穿网络型的介电弹性体复合材料比普通介电弹性体材料的电致变形性能更佳(见图33).
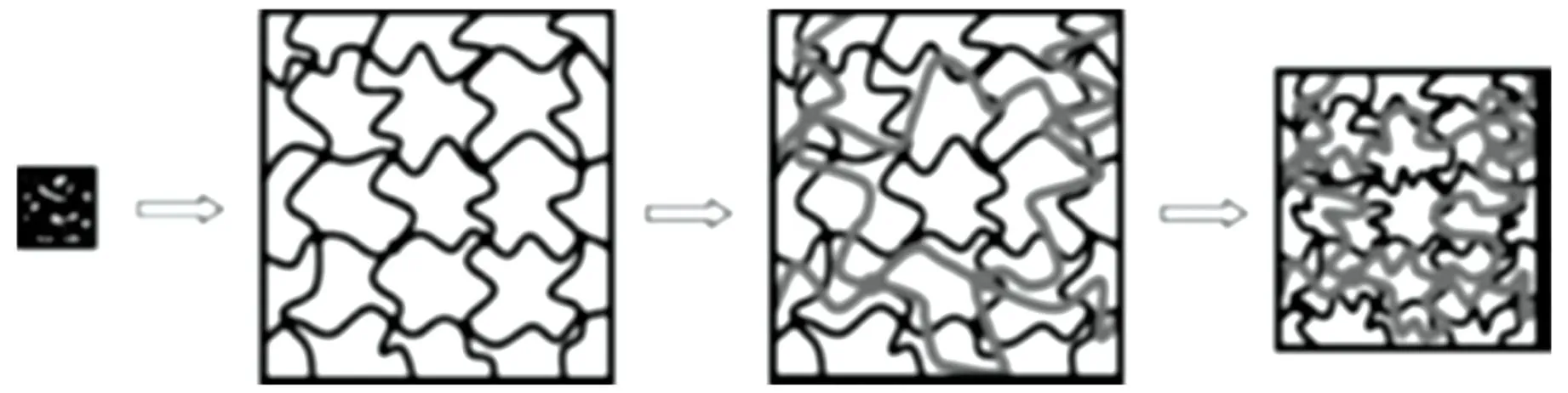
图33 互穿网络聚合物薄膜制备过程[80]
3.2.3介电弹性体理论研究进展
2000年,Pelrine等建立一个简单的模型来描述施加电场后的介电弹性体的力学性能. 把均匀涂覆柔性电极的介电弹性体看成可变电容的平行板电容器,(这是因为施加机械力和电场力后,材料将产生厚度的降低和面积的增加,因此影响电容的变化),基于经典的麦克斯韦理论,推导出应力与施加电场和材料介电常数的关系. 它揭开了介电弹性体本构理论研究的序幕[82]. 基于热力学理论,美国哈佛大学锁志刚教授研究组建立了可变形电介质的热力学理论框架. 他们从能量的角度出发,考虑机电耦合效应,建立联合弹性应变能和电场能的系统自由能函数,推导可变形电介质(比如介电弹性体)的本构关系,研究其力学行为[83]. 把自由能直接写成了弹性能和电场能的简单加和形式,没考虑两种能量之间的耦合. 这是因为机械响应和电响应的响应时间相差几个数量级. 耦合存在于电场能的表达和几何学关系中. 在此基础上,刘彦菊等基于超弹性理论和机电耦合理论,并联合材料参数的实验测试,分析了介电弹性体及其复合材料的力学行为,推导出不同条件下的本构关系(比如:约束变形情况下和自由变形情况下)[84]. 洪伟建立了粘弹性电介质耗散系统的热力学框架,推导出本构关系,并研究其瞬态的不稳定性[85]. 赵选贺等研究了介电弹性体非线性和非平衡态粘弹性力学行为[53,86].
介电弹性体在机械力场和电场等物理场耦合作用下将导致系统失稳,影响材料及其应用器件的正常工作. 介电弹性体机电稳定性研究开始于2007年[53,87]. 锁志刚等揭示了介电弹性体软质材料从机电稳定到机电不稳定这一过程:施加电场后,由于静电力作用,材料将沿电场施加的方向收缩,厚度变小导致施加的电场强度更高,静电力更大,这一不可逆过程一直持续下去,当超过其临界电场时,介电弹性体被击穿,这就是介电弹性体的机电不稳定[87]. Plante等在实验中观测到介电弹性体的机电不稳定现象[88](见图34),当电压增加到一定值时,介电弹性体薄膜分为平滑区域和褶皱区域. 处于平滑区的薄膜比较厚,平面拉伸较小;褶皱区的薄膜比较薄,平面拉伸较大. 并且,实验过程中可明显的观测到介电弹性体薄膜的机电不稳定区域的传播过程[89].

图34 介电弹性体的机电不稳定[53,88]
锁志刚等提出应用自由能模型分析介电弹性体机电稳定性[87]. 以neo-Hookean为例,对介电弹性体施加等双轴预应力和非等双轴预应力时的性质分别进行了研究,得出了介电弹性体名义电位移和名义电场的关系,从理论层面证明了预拉伸能够显著提高介电弹性体的机电稳定性这一实验现象,计算出的临界击穿电场和实验结果吻合的很好[87-88]. 基于此,对介电弹性体机电耦合系统的非线性机电稳定性的分析逐渐深入[87,89-100]. 刘彦菊等通过对Mooney-Rivlin弹性应变能模型引入两个材料常数的分析介电弹性体的机电稳定性行为,引入的材料常数比k,得出当k增大时,对应不同类型或结构的介电弹性体机电稳定性显著增强. 理论结果能够帮助指导介电弹性体驱动器的设计和制造[90]. 进一步,刘彦菊等应用多材料常数的弹性应变能模型对介电弹性体机电稳定性进行了分析[53,91]. Norrisa应用Ogden弹性应变能分析弹性体的稳定性行为,并给出Ogden模型简化形式时,临界真实电场、名义应力与拉伸率的更为简化的精确关系[92]. 周进雄等对介电弹性体的不稳定性传播进行了研究[89]. 何天虎等研究了介电弹性体经历非均匀变形时的机电稳定性[94-95]. Xu等应用全应力理论进行了介电弹性体的机电稳定性研究[96]. 线性或非线性电致伸缩变化的介电弹性体的大变形和机电稳定性被深入研究[97-101]. 介电弹性体经历大变形时的介电常数依赖于自身的变形[84,101]. 刘彦菊等基于Gofod等对丙烯酸的实验研究[101],提出介电常数是拉伸的非线性函数,从解析表达和数值模拟两个角度深入研究系统的机电稳定性[98-100]. 在对介电弹性体的电致变形实验中,研究人员观测到它从一个稳定状态突然跳变到另一个稳定状态,这一过程被称为突跳稳定性[102-103]. 理论结果也表明,介电弹性体有可能在未被电击穿的情况下避免机电不稳定的产生,进而稳定在一个厚度更薄的状态. 这是由于介电弹性体达到拉伸极限附近时,硬度突然急剧增大,增加了其抵抗电击穿的能力,避免或者消除了机电不稳定的产生[104].
实验证明,可通过以下几种方法来获得介电弹性体大电致变形:预拉伸介电弹性体[82],互穿网络的介电弹性体[80,105],应用弹性体在溶剂中的溶胀效应[106],电荷驱动介电弹性体[107]等. 下面列举几个典型的电致变形实验. 1998年,Pelrine等揭示出对硅橡胶介电弹性体施加电场后可产生30%的电致驱动变形[108]. 2000年,Science报道了经历300%的等双轴预拉伸后丙烯酸在施加电场的条件下产生100%的电致驱动变形[82]. Ha等进行的实验证明了在介电弹性体中引入第2种网络,使弹性体内部的预拉伸增加,进而增大了其电致驱动变形[105]. 另外,应用电荷驱动代替电压驱动介电弹性体可以诱导其产生超过100%的电致变形,这是因为应用电荷驱动可以有效的抑制或避免机电不稳定的发生[106]. 赵选贺和锁志刚建立了能够产生超大电致变形的介电弹性体理论,根据电压—拉伸曲线和电击穿—拉伸曲线的不同位置关系,提出3种不同机电响应特性的介电弹性体. 该理论预测出选择和设计适当的电压变形响应,超过500%的超大电致变形是可能达到的[107-108]. Koh等理论阐明了预拉伸后的介电弹性体或具有短链的介电弹性体复合材料将产生更大的电致驱动变形,综合考虑预拉伸,应变硬化和聚合物链长的影响,提出了介电弹性体产生超大变形的机理[109].
介电弹性体的机电相变理论及应用此理论进行更大能量转化的方法被哈佛大学锁志刚教授研究组提出,与物质的相变类似,介电弹性体的厚度改变过程被称为机电相变[53,110]. 从理论角度解释了介电弹性体机电相变现象. 他们得到介电弹性体在单轴拉伸和施加电压情况下,自由能随拉伸率的变化规律:曲线中存在两个局部最小点和一个鞍点,分别对应于介电弹性体拉伸率不同的两个变形稳定状态以及不稳定状态. 两个稳定状态对应不同的自由能,对应于介电弹性体的薄厚两个稳定的状态. 当机械力及施加电压发生改变时,弹性体将从当前稳定状态跳变到另一个稳定状态. 在此基础上,Lu等[111]研究了介电弹性体管状充气驱动器在电压和内压共同作用下的机电相变及其能量转化,推导出膨胀区域与未膨胀区域共存的条件,并根据电击穿和机械破坏确定了其许用区域. 结果表明膨胀转换可以显著增大机电能量转换,管内通气膨胀区域与未膨胀区域共存时一个机电循环产生的能量是仅有未膨胀区域时的几千倍.
介电弹性体换能器的动态特性以及机电转换能力会受到耗散过程(如粘弹性,介电松弛以及漏电)的影响[53]. 介电弹性体受力和电压作用时产生响应是时间相关的耗散过程. 聚合物长链间的滑动和单体连接点的旋转可导致黏弹性松弛;电子云畸变和极化群转动可导致介电松弛; 电子和离子在介电弹性体内的迁移可导致导电松弛. 在外力作用下,介电弹性体在一个特征时间内松弛至一个新的变形状态,这一特征时间即为粘弹性松弛时间;相应的,在外电场作用下,存在介电松弛时间. Choon Chiang Foo等[112]基于非平衡热力学建立了介电弹性体的耗散模型并对耗散介电弹性体的机电性能进行分析. 与耗散有关的变量影响系统的自由能密度函数但与外载做功无关. 基于上述模型,Choon Chiang Foo等[113]又对介电弹性体机电换能器性能进行分析. 他们对一种机电换能器进行了研究,分析了不同循环速度以及不同变形条件下的换能器性能. 李铁风等人研究了薄膜充气式能量收集器在考虑非均匀场和粘弹性变形时的能量耗散和循环,指出了能量收集装置在急速加载卸载以及经过预拉伸下具有更优的性能[53,114]. 王惠明等人研究了介电弹性体薄膜在气压与电压耦合加载下的粘弹性变形,计算各种场随时间的变化情况,结果表明当外载小时薄膜会逐渐趋于稳定,而外载过大时会随着时间推移将会发生力电失稳的情况[115].
在介电弹性体中,每个聚合物链可能由电偶极子单体组成. 当介电弹性体受电压作用时,偶极子向电场方向转动. 当电压增加到足够大时,偶极子和电场将会处于完全平行的状态,此时材料极化饱和. 这种非线性的介电性能可包含在广义理想介电弹性体模型中[52]. 李博等研究了极化饱和对介电弹性体的机电不稳定性的影响[116]. 基于理想弹性体模型,考虑了介电非线性,通过对等双轴拉伸的介电弹性体膜的研究,得到了介电弹性体在不发生机电不稳定的情况下获得大变形的几种途径;提出了介电弹性体的不同极化模型,进而研究了当材料失效时的驱动模式,通过理论证明了极化饱和可有效抑制或消除机电不稳定. 李博等从分子链角度建立了条件极化模型,通过理论说明了条件极化能够消除介电弹性体的不稳定性[117]. Lallart等考虑了空间电荷分布不均匀性,确立了介电常数-薄膜厚度表达式,并考虑极化饱和的影响,对极化强度进行修正. 理论分析及实验结果表明极化饱和对聚合物的变形有限制作用[118]. 在此基础上,他们又对多相电活性聚合物驱动器的变形驱动能力进行了研究[118-119],通过理论对影响考虑了极化饱和的两相电活性聚合物系统变形能力的因素(相比,电场,频率,温度等)进行分析,并通过实验进行验证[53].
4介电弹性体材料的航空航天领域应用
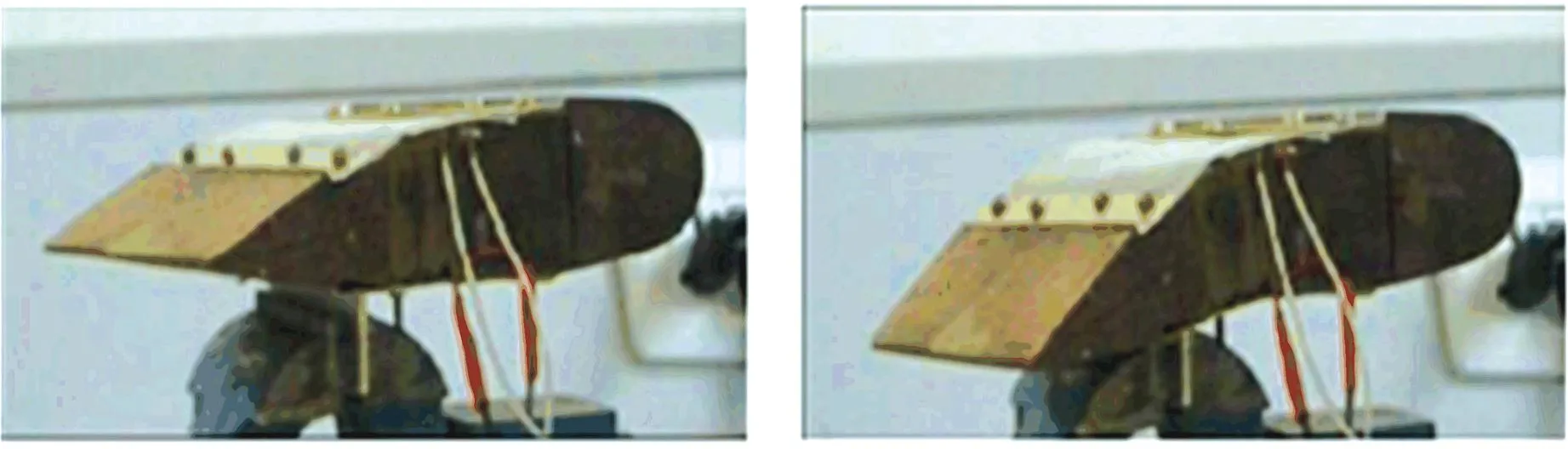
EAP材料在航空航天领域的应用潜力已经初步显示出来. 传统的的空间探测器窗口除尘机械刷不仅重量大而且结构复杂,而基于EAP驱动器,可以制成空间用智能除尘刷(比如月球车除尘刷,见图35),具有重量轻、结构紧凑、驱动功率低等优点,可、减轻空间探测器的重量[53,66]. 2007年,瑞士联邦材料测试研究实验室提出采用介电弹性体制作飞艇舵驱动器,能够控制飞艇的自由转向[53,67](见图36(a)). 从2002年,俄亥俄航天局开始了基于电致活性聚合物材料进行新概念飞行器—固态飞行器SSA(Solid State Aircraft)研究[68]( 见图36(b)). 太空碎片已逐渐成为在轨道运行的航天器的重大威胁. 而基于介电弹性体的最小能量结构夹持器,由于其具有质量轻、能耗低等特点,与机械式抓取结构相比具有独特的优势,故已逐渐在抓取空间碎片的方向上做出努力[53,120]. 图37(a)分别为装有该夹持器的卫星概念图,夹持目标与多节式夹持器实物图. 图37(b)为基于介电弹性体的最小能量结构夹持器的工作过程. 该夹持结构,在发射时为了节省空间,处于卷曲状态(状态1),入轨后释放该夹持器,由于其自身的弹性能恢复其初始状态(状态2),对夹持器施以电压,进一步展开(状态3),抓取空间碎片后,撤去电压,将碎片抓牢(状态4 与5). 制作出的用于概念验证的夹持器,仅有0.65 g的质量,却有着2.2 mN 的最大夹持力与不小于60°的最大弯曲角[53,120].
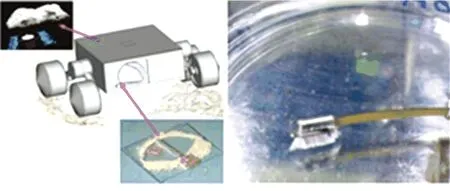
图35 基于电活性聚合物的智能除尘刷 [53,66]
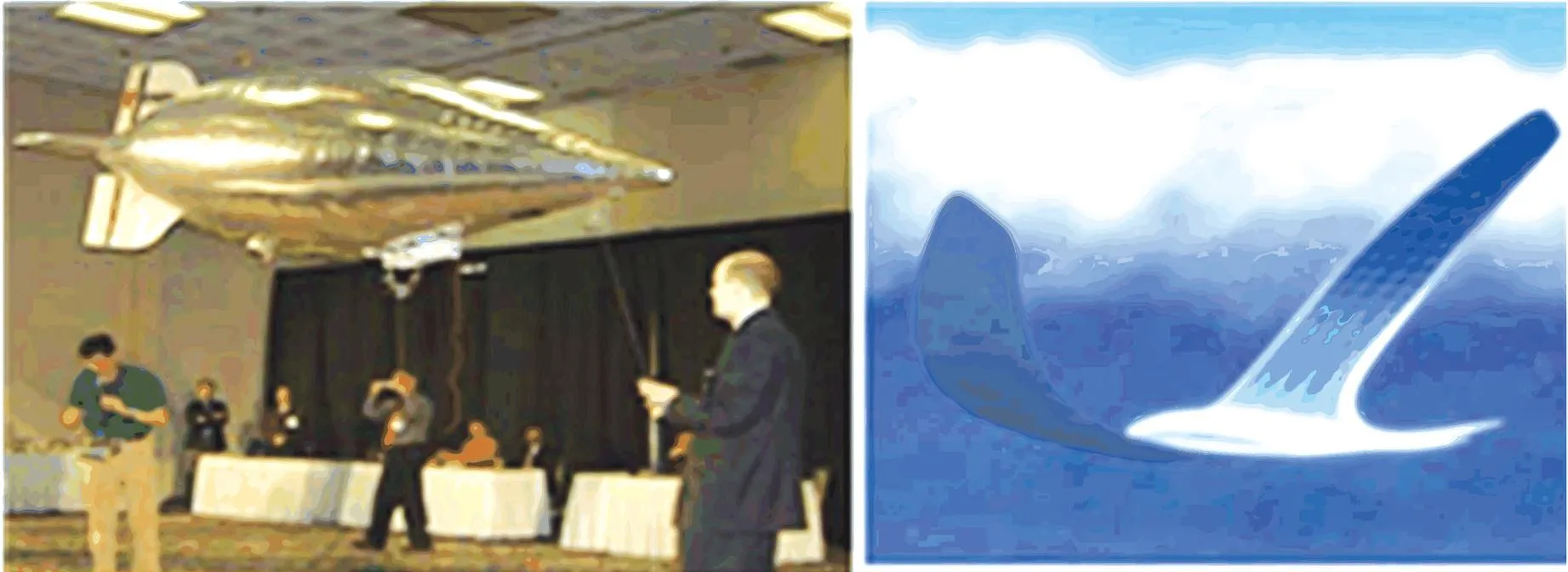
(a)飞艇舵 (b)固态飞行器
图36基于电活性聚合物的飞艇舵[53,67]固态飞行器[53,68]
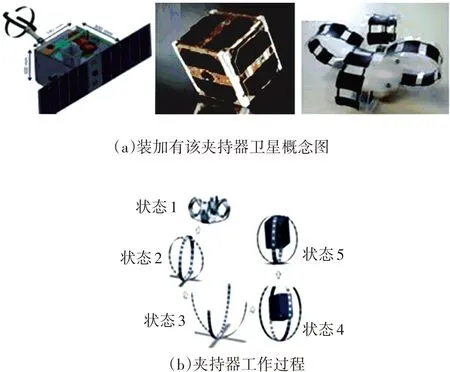
图37 基于介电弹性体的卷曲多节式可展开夹持器[53,120]
5结论
本文综述了形状记忆聚合物及其复合材料、电致活性聚合物材料以及在航空航天领域的应用. 形状记忆聚合物及其复合材料以及电致活性聚合物材料的诸多优势已经在许多方面展示出其潜在应用价值. 随着研究工作的不断深入,形状记忆聚合物及其复合材料以及电致活性聚合物材料的力学性能和形状记忆效应会不断提高和改善、成本不断降低,其在各个领域应用的广度和深度将不断拓宽.
参考文献
[1] LENG J S, LV H B, LIU Y J, et al. Shape memory polymers—a class of novel smart material[J]. MRS Bulletin, 2009,34: 848-855.
[2] LIU Y J, LV H B, LAN X, et al. Review of electro-active shape-memory polymer composite[J]. Composites Science and Technology, 2009, 69: 2064-2068.
[3] LENG J S, DU S Y. Shape Memory polymer and multifunctional nanocomposite[M]. [S.l.]: CRC Press /Taylor & Francis. 2010.
[4]LENG J S, LAU K T. Multifunctional polymer nanocomposites[M]. [S.l.]: CRC Press. 2010.
[5] XIAO X L, KONG D Y, ZHANG F H, et al. Shape memory polymers with adjustable high glass transition temperatures[J]. Macromolecules, 2015, 10:1021.
[6] MENG H , LI G Q. A review of stimuli-responsive shape memory polymer composites[J]. Polymer, 2013, (54): 2199-2221.
[7] ZHANG S F, FENG Y K, ZHANG L, et al. Novel interpenetrating networks with shape-memory properties[J]. Journal of Polymer Science Part a-Polymer Chemistry, 2007, 45: 768-775.
[8] LENDLEIN A, JIANG H Y. Light-induced shape-memory polymers[J]. Nature, 2005, 434: 879-882.
[9] MONKMAN G J. Advances in shape memory polymer actuation[J]. Mechatronics, 2000, 10: 489-498.
[10]LIU Y J, DU H Y, LIU L W, et al. Shape memory polymers and their composites in aerospace applications: a review[J]. Smart Materials and Structures, 2014, 23(2): 1077-1135.
[11]GALL K, YAKACKI C M, LIU Y P, et al. Thermomechanics of the shape memory effect in polymers for biomedical applications[J]. Journal of Biomedical Materials Research Part A, 2005, 73A(3): 339-348.
[12]HU J L, ZHU Y, HUANG H H, et al. Recent advances in shape-memory polymers: structure, mechanism, functionality, modeling and applications[J]. Progress in Polymer Science, 2012, 37(12):1720-1763.
[13]HORNBOGEN E. Comparison of shape memory metals and polymers[J]. Advanced Engineering Materials, 2006, 8: 101-106.
[14]LENG J S, LV H B, LIU Y J, et al. Synergic effect of carbon black and short carbon fiber on shape memory polymer actuation by electricity[J]. Journal of Applied Physics, 2008, 104: 104917.
[15]LENG J S, LV H B, LIU Y J, et al. Electroactivate shape-memory polymer filled with nanocarbon particles and short carbon fibers[J]. Applied Physics Letters, 2007, 91: 144105.
[16]WEI Z G, SANDSTROM R, MIYAZAKI S. Shape memory materials and hybrid composites for smart systems: part II shape-memory hybrid composites[J]. Journal of Materials Science, 1998, 33(15): 3763-3783.
[17]MOHR R, KRATZ K, WEIGEL T, et al. Initiation of shape-memory effect by inductive heating of magnetic nanoparticles in thermoplastic polymers[J]. Proceedings of PNAS, 2006, 103:3540-3545.
[18]GALL K, KREINER P, TURNER D, et al. Shape-memory polymers for microelectromechanical systems[J]. Journal of Microelectromechanical System, 2004, 13: 472-483.
[19]GALL K, KREINER P, TURNER D, et al. Shape-memory polymers for microelectromechanical systems[J]. Journal of Microelectromechanical System, 2004, 13: 472-483.
[20]LIU Y P, GALL K, DUNN M L, et al. Thermomechanics of shape memory polymer nanocomposites[J]. Mechanics of Materials, 2004, 36: 929-940.
[21]GALL K, DUNN M L. Shape memory polymer nanocomposites[J]. Acta Materialia, 2002, 50: 5115-5126.
[22]YANG B, HUANG W M, LI C et al. Effects of moisture on the thermomechanical properties of a polyurethane shape memory polymer[J]. Polymer, 2006, 47: 1348-1356.
[23] LIU Z Q, JIAO D, WENG Z Y. Water-assisted self-healing and property recovery in a natural dermal armor of pangolin scales[J]. Journal of the mechanical behavior of biomedical materials, 2016, 56: 14-22.
[24]LENG J S, LAN X,. HUANG W M. Electrical conductivity of thermoresponsive shape-memory polymer with embedded micron sized Ni powder chains[J]. Applied Physics Letters, 2008, 92: 014104.
[25]LENG J S, HUANG W M, LAN X, et al. Significantly reducing electrical resistivity by forming conductive Ni chains in a polyurethane shape-memory polymer/carbon-black composite[J]. Applied Physics Letters, 2008, 92: 204101.
[26]ROUSSEAU I A, XIE T. Shape memory epoxy: composition, structure, properties and shape memory performances[J]. Journal of Materials Chemistry, 2010, 20: 3431-3441.
[27]BARRETT R, FRANCIS W, ABRAHAMSON E, et al. Qualification of elastic memory composite hinges for spaceflight applications[C]//47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Newport, Rhode Island: AIAA Press, 2006. 20391-10.
[28]SCHMIDT A M. Electromagnetic activation of shape-memory polymer networks containing magnetic nanoparticles[J]. Macromolecular Rapid Communication, 2006, 27(14): 1168-1172.
[29]HUANG W M, YANG B, LI C, et al. Water-driven programmable polyurethane shape memory polymer: demonstration and mechanism[J]. Applied Physics Letters, 2005, 86(11): 114105.
[30]LI W B, LIU Y J, LENG J S. Shape memory polymer nanocomposite with multi-stimuli response and two-way reversible shape memory behavior[J]. Royal Society of Chemistry, 2014, 4, 61847.
[31]谢宗武, 宫钇成, 史士财, 等. 空间太阳能电池阵列技术综述[J]. 宇航学报, 2014,35(05):491-498.
[32]JONES P A, SPENCE B R. Spacecraft solar array technology trends[J]. Aerospace and Electronic Systems Magazine, IEEE, 2011,26(8):17-28.
[33]ATWELL W, BADHWAR G. A shielding model for an inflatable vehicle, TransHab, and the associated astronaut space radiation risk assessment[C]//33rd Scientific Assembly of the Committee on Space Research (CaSPAR) Warsaw, Poland:Source of Acquisition NASA Johnson Space Center, 2000:1-5.
[34]MARK S L, NASEEM A M, MICHAEL L T. Application of elastic memory composite materials to deployable space structures[C]//AIAA Space 2001Conference and Exposition,Albuquerque. New Mexico, American Institute of Aeronautics & Astronautics,2001,4602:1-10.
[35]LAN X, LIU Y J, LENG J S. Fiber reinforced shape-memory polymer composite and its application in a deployable hinge[J]. Smart Materials and Structures, 2009, 18: 024002.
[36]ROYBAL F A. Development of an elastically deployable boom for tensioned planar structures[C]//48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Honolulu, Hawaii: AIAA Press, 2004:143-153.
[37]CAMPBELL D, LAKE M S. Elastic memory composite material: an enabling technology for future furlable space structures[C]//46th AIAA/ASME/ASCE/AHS/ASC structures, structural dynamics and materials conference. Austin, Texas: AIAA Press, 2005:1-9.
[38]KELLER P N, LAKE M S, CODELL D, et al. Development of elastic memory composite stiffeners for a flexible precision reflector[C]//47th AIAA/ASME/ASCE/AHS/ASC Structures, structural dynamics, and materials conference. Newport, Rhode Island: AIAA Press, 2006: 1-11.
[39]LIN J K H, KNOLL C F, WILLEY C E. Shape memory rigidizable inflatable (RI) structures for large space systems applications[C]//47th AIAA/ASME/ASCE/AHS/ASC structures, structural dynamics, and materials conference. Newport, Rhode Island: AIAA Press, 2006: 1-10.
[40]JOHN K H L, FANG H F. Concept study of a 35-m spherical reflector system for NEXRAD in space application[C]//47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Newport, Rhode Island:AIAA Press,2006:1604.
[41]CADOGAN, D P, SCHEIR C. Expandable habitat technology demonstration for lunar and antarctic applications[C]//International Conference on Environmental Systems. San Francisco: CA Press, 2008.[42]ARZBERGER S C, MUNSHIA N A, LAKEA M S, et al. Ulmer. Elastic memory composite technology for thin, lightweight space and ground-based deployable mirrors[C]//Proceedings of SPIE. Bellingham, USA: SPIE Press, 2003: 143-154.
[43]VARLESE S J, HARDAWAY L R. Laminated electroformed shape memory composite for deployable light weight optics[C]//Proceedings of SPIE. Bellingham, USA: SPIE Press, 2004: 375-383.
[44]LENG J S, WU X L, LIU Y J. Effect of linear monomer on thermomechanical properties of epoxy shape memory polymers[J]. Smart Materials and Structures, 2009, 45(4): 52-56.
[45]MURPHEY T W, Meink T, MIKULAS M. M. Some micromechanics considerations of the folding of rigidizable composite materials[C]//42nd AIAA/ASME/ASCBAHS/ASC Structures, Structural Dynamics, and Materials Conference. Seattle: WA Press, 2001 .
[46]BYE D, MC CLURE P. Design of a morphing vehicle[C]// 48th AIAA/ASME/ ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference. Honolulu, Hawaii, USA: AIAA Press, 2007: 2007-1728.
[47]孙健. 基于SMPC蒙皮和主动蜂窝结构的可变形机翼结构研究[D].哈尔滨:哈尔滨工业大学,2015.
[48]YU K, YIN W, SUN S, et al. Design and analysis of morphing wing based on SMP composite[C]// Proceeding of SPIE . San Diego,USA: SPIE Press, 2009: 72900S.
[49]PERKINS D, REED J, HAVENS J. Morphing wing structures for loitering air vehicles[C]//45th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference. Palm Spring,California, USA: AIAA Press, 2004: 2004-1888.
[50]KEIHL M, BORTOLIN R, SANDERS B, et al. Mechanical properties of shape memory polymers for morphing aircraft applications[C]//Proceedings of SPIE. Bellingham, USA: SPIE Press, 2005: 143-151.
[51]YIN W, FU T, LIU Y J et, al. Structural shape sensing for variable camber wing using FBG sensors[C]//Proceeding of SPIE. San Diego, USA: SPIE Press, 2009: 72921H.
[52]SUO Z G. Theory of dielectric elastomers[J]. Acta Mechanica Solida Sinica, 2010, 23(6): 549-578.
[53]刘立武,李金嵘,吕雄飞,等. 电活性介电弹性体的本构理论和稳定性研究进展[J]. 中国科学,2015, 45(5):450-463.
[54]BROCHU P, PEI Q B. Advances in dielectric elastomers for actuators and artificial muscles[J]. Macromolecular Rapid Communications, 2010, 31: 10-36.
[55]MIRFAKHRAI T, MADDEN J, BAUGHMAN R. Polymer artificial muscles[J]. Materialstoday, 2007, 10(4): 30-38.
[56]O’HALLORAN A, O’MALLEY F, MCHUGH P. A review on dielectric elastomer actuators, technology, applications, and challenges[J]. Journal of Applied Physics, 2008, 104: 071101.
[57]MADDEN J D, VANDESTEEG N, MADDEN P G, et al. Artificial muscle technology: physical principles and naval prospects[J]. IEEE Journal of Oceanic Engineering, 2004, 29: 706.
[58]BAR-COHEN Y. Electroative polymers as artificial muscles capabilities, potentials and challenges[M]. Hanbook on biomimetics. NTS Incorporated 2000, 1-13.
[59]BAR-COHEN Y. Biologically inspired technology using electroactive polymers[C]// Proceedings of SPIE, San Diego: SPIE Press, 2006, 6168: 616803.
[60]BAR-COHEN Y. Electroative Polymers: Current capabili ties and challenges[C]// Proceedings of SPIE, San Diego: SPIE Press, 2002, 4695: 1-7.
[61]BAR-COHEN Y. Humanlike robots as platforms for electroactive polymers (EAP)[C]//The International Society for Optical Engineering, Proceedings of SPIE. San Diego: SPIE Press,2008, 10(2): 1-17.
[62]BAR-COHEN Y. Biologically inspired intelligent robots using artificial muscles[C]// Proceedings International Conference on MEMS, NANO and Smart Systems , Banff, AB, Canada : Institute of Electrical and Electronics Engineers Inc. ,2003, 5(1): 1-15 .
[63]BAR-COHEN Y. Bionic humans using EAP as Artificial muscles reality and challenges[C]//International Journal of Advanced Robotic Systems. InTech Europe: Slavka Krautzeka, 2004, 217-222.
[64]BAR-COHEN Y. Biologically inspired technologies using artificial muscles[C]// Progress in Biomedical Optics and Imaging, Proceedings of SPIE. San Jose, CA.United states :SPIE Press,2005, 7(1): 1-26 .
[65]BAR-COHEN Y. WorldWide ElectroActive Polymer (WW-EAP) Newsletter[C]//The International Society for Optical Engineering ,Proceedings of SPIE. San Diego: SPIE Press, 2010, 12(1): 1- 19.
[66]BAR-COHEN Y. Biologically inspired robots[C]// The International Society for Optical Engineering ,Proceedings of SPIE. Newport Beach, CA, United states:SPIE Press, 2001, 3(2): 1-15 .
[67]BAR-COHEN Y. Electroactive polymers as an enabling materials technology[J]. Journal of Mechanical Engineering Science. 2007, 221(G4): 553-564.
[68]BAR-COHEN Y. Bionic humans using EAP as Artificial muscles reality and challenges[J]. International Journal of Advanced Robotic Systems ,2004, 6(1): 1- 20 .
[69]BAR-COHEN Y. Artificial muscular microfibers: Hydrogel with high speed tunable electroactivity[J]. Soft Matter ,2011, 7(10): 4833-4838.
[70]YOUNG YANG E E. Phenomenological constitutive models for dielectric elastomer membranes for artificial muscle[D]. Pennsylvania: The Pennsylvania State University, 2006.
[71]ZHAO X H. Mechanics of soft active materials[D]. Massachusetts: Harvard University,2009.
[72]KOFOD G. Dielectric elastomer actuators[D]. Denmark: The Technical University of Denmark,2001.
[73]PLANTE J S. Dielectric elastomer actuators for binary robotics and mechatronics[D]. Massachusetts: Massachusetts Institute of Technology, 2006.
[74]FOX J W. Electromechanical characterization of the static and dynamic response of dielectric elastomer membranes[D]. Virginia, United States: Virginia Polytechnic Institute and state University, 2007.
[75]LIU L W, LI J R, LIU YJ, et, al. Electric field induced variation of temperature and entropy in dielectric elastomers[J]. Journal of Mechanical Science and Technology, 2015, 29(1): 109-114.
[76]CARPI F, ROSSI D D, KORNBLUH R, et al. Dielectric elastomers as electromechanical transducers[M]. New York: Elsevier Press, 2008: 12-260.
[77]BAR-COHEN Y. Electroactive polymer (EAP) actuators as artificial muscles: reality, potential, and challenges[C]//Proceeding of SPIE. Bellingham, USA: SPIE Press,2004:1-765.
[78]KIM B K, LEE S Y, LEE J S, et al. Polyurethane ionomers having shape memory effects[J]. Polymer, 1998, 39(13): 2803-2808.
[79]CARPI F, CALLONE G, GALANTINI F, et al. Silicone-poly(hexylthiophene) blends as elastomers with enhanced electromechanical transduction properties[J]. Advanced Functional Materials, 2008, 18:235-24.
[80]HA S M, YUAN W, PEI Q, et, al. Interpenetrating networks of elastomers exhibiting 300% electrically-induced area strain[J]. Smart Materials and Structures, 2007, 16: S280-S287.
[81]GALLONE G, CARPI F, ROSSI D D, et, al. Dielectric constant enhancement in a silicone elastomer filled with lead magnesium niobate-lead titanate[J]. Materials Science and Engineering C, 2007, 27: 110-116.
[82]PELRINE R, KORNBLUH R, PEI Q B. High-speed electrically actuated elastomers with strain greater than 100%[J]. Science, 2000, 287(28): 836-839.
[83]SUO Z G, ZHAO X H, GREENE W H. A nonlinear field theory of deformable dielectrics[J]. Journal of the Mechanics and Physics of Solids, 2008, 56: 467-486.
[84]LIU Y J, LIU L W, ZHANG Z, et al. Dielectric elastomer film actuators: characterization, experiment and analysis[J]. Smart Materials and Structures, 2009, 18: 095024.
[85]HONG W. Modeling viscoelastic dielectrics[J]. Journal of the Mechanics and Physics of Solids, 2011, 59: 637-650.
[86]ZHAOX H, KOH S J A, SUO Z G. Nonequilibrium thermodynamics of dielectric elastomers[J]. International Journal of Applied Mechanics, 2011, 3: 203-217.
[87]ZHAO X H, SUO Z G. Method to analyze electromechanical stability of dielectric elastomers[J]. Applied Physics Letters, 2007, 91: 061921.
[88]PLANTE J S, DUBOWSKY S. Large-scale failure modes of dielectric elastomer actuators[J]. International Journal of Solids and Structures, 2006, 43: 7727-7751.
[89]ZHOU J X, HONG W, ZHAO X H, et al. Propagation of instability in dielectric elastomers[J]. International Journal of Solids and Structures, 2008, 45: 3739.
[90]LIU Y J, LIU L W, ZHANG Z, et al. Comment on “Method to analyze electromechanical stability of dielectric elastomers[J]. Applied Physics Letters, 2008, 93(10): 106101.
[91]LIU Y J, LIUL W, SUN S H, et al. Stability analysis of dielectric elastomer film actuator[J]. Science China-technological Sciences, 2009, 52(9): 2715-2723.
[92]NORRISA A N. Comment on “Method to analyze electromechanical stability of dielectric elastomers”[J]. Applied Physics Letters, 2008, 92(2): 026101.
[93]STARK K H, GARTON C G. Electric strength of irradiated polythene[J]. Nature, 1955, 176: 1225-1226.
[94]HET H, ZHAO X H, SUO Z G. Equilibrium and stability of dielectric elastomer membranes undergoing inhomogeneous deformation[J]. Applied Physics Letters, 2009, 106: 083522.
[95]HE T H, CUI L L, CHEN C, et al. Nonlinear deformation analysis of a dielectric elastomer membrane-spring system[J]. Smart Material Structure, 2010, 19: 085017.
[96]XU B X, MUELLER R, CLASSEN M, et al. On electromechanical stability analysis of dielectric elastomer actuators[J]. Applied Physics Letters,2010, 97: 162908.
[97]ZHAO X H, SUO Z G. Electrostriction in elastic dielectrics undergoing large deformation[J]. Applied Physics Letters, 2008, 104: 123530.
[98]LENG J S, LIU L W, LIU Y J, et al. Electromechanical stability of dielectric elastomer[J]. Applied Physics Letters, 2009, 94: 211901.
[99]LIU Y J, LIU L W, SUN S H, et al. Electromechanical stability of Mooney-Rivlin-type dielectric elastomer with nonlinear variable dielectric constant[J]. Polymer International, 2010, 59: 371-377.
[100]LIU Y J, LU L W, YU K, et al. An investigation on electromechanical stability of dielectric elastomers undergoing large deformation[J]. Smart Material Structure, 2009, 18: 095040.
[101]KOFOD G, SOMMER-LARSEN P, KRONBLUH R, et al. Actuation response of polyacrylate dielectric elastomers[J]. Journal of Intelligent Material Systems and Structures, 2003, 14: 787.
[102]ZHAO X H, HONG W, SUO Z G. Electromechanical hysteresis and coexistent states in dielectric elastomers[J]. Physical Review Letters B, 2007, 76: 134113.
[103]SUO Z G, ZHU J. Dielectric elastomers of interpenetrating networks[J]. Applied Physics Letters, 2009, 95: 232909.
[104]LI B, LIU L W, SUO Z G. Extension limit, polarization saturation, and snap-through instability of dielectric elastomers[J]. International Journal of Smart and Nano Materials, 2011, 2(2): 59-67.
[105]HA S M, YUAN W, PEI Q B, et al. Interpenetrating polymer networks for high-performance electroelastomer artificial muscles[J]. Aadvanced Materials, 2006, 18: 887-891.
[106]SHANKAR R, TGHOSH T K, SPONTAK R J. Mechanical and actuation nanostructured polymers as tunable actuators[J]. Aadvanced Materials,2007, 19: 2218-2223.
[107]KEPLINGER C, KALTENBRUNNER M, ARNOLD N, et al. Röntgen’s electrode-free elastomer actuators without electromechanical pull-in instability[J]. Proceedings of the National Academy of Sciences USA, 2010, 107(10): 4505-4510.
[108]PELRINE R E, KORNBLUH R D, JOSEPH J P. Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation[J]. Sensors and Actuators A physical,1998, 64(1): 77-85.
[109]KOH S J A, LI T F, ZHOU J X, et al. Mechanisms of large actuation strain in dielectric elastomers[J]. Journal of Polymer Science Part B: Polymer Physics,2011, 49: 504-515.
[110]HUANG R, SUO Z G. Electromechanical phase transition in dielectric elastomers[J]. Proceeding of the Royal Society A—Mathematical Physical and Engineer Sciences,2012, 468: 1014-1040.
[111]LU T Q, SUO Z G. Large conversion of energy in dielectric elastomers by electromechanical phase transition[J]. Acta Mechanica Sinica, 2011, 28: 1106-1114.
[112]FOO C C, CAI S Q, KOH S J A, et al. Model of dissipative dielectric elastomers[J]. Applied Physics Letters,2012, 111: 034102.
[113]FOO C C, KOH S J A, KEPLINGER C, et al. Performance of dissipative dielectric elastomer generators[J]. Applied Physics Letters,2012,111: 094107.
[114]LI T F, QU S X, YANG W. Energy harvesting of dielectric elastomer generators concerning inhomogeneous fields and viscoelastic deformation[J]. Applied Physics Letters, 2012, 112: 034119.
[115]WANG H M, LEI M, CAI S Q. Viscoelastic deformation of a dielectric elastomer membrane subject to electromechanical loads[J]. Applied Physics Letters, 2013, 113: 213508.[116]LI B, LIU L W, SUO Z G. Extension limit, polarization saturation, and snap-through instability of dielectric elastomers[J]. International Journal of Smart and Nano Materials, 2011, 2(2): 59-67.
[117]LI B, CHEN H L, QIANG J H, et al. A model for conditional polarization of the actuation enhancement of a dielectric elastomer[J]. Soft Matter, 2012, 8: 311.
[118]LALLART M, CAPSAL J F, KANDA M, et al. Modeling of thickness effect and polarization saturation in electrostrictive polymers[J]. Sens Actuator B-Chem,2012, 171-172: 739-746.
[119]LALLART M, CAPSAL J F, IDRISSA A K M, et al. Actuation abilities of multiphasic electroactive polymeric systems[J]. Applied Physics Letters,2012,112: 094108.
[120]ARAROMI O A, GAVRILOVICH I, SHINTAKE J, et al. Rollable multisegment dielectric elastomer minimum energy structures for a deployable microsatellite Gripper[J]. IEEE-ASME Trans Mechatron, 2014, 20: 438-446.
(编辑王小唯苗秀芝)
Soft intelligent material and its applications in aerospace
LIU Liwu1, ZHAO Wei1, LAN Xin2, LIU Yanju1, LENG Jinsong2
(1. Department of Astronautic Science and Mechanics, School of Astronautics, Harbin Institute of Technology, Harbin 150001, China;2.Center for Composite Materials and Structures, School of Astronautics, Harbin Institute of Technology, Harbin 150080, China)
Abstract:Soft intelligent materials can produce different deformation under some external stimuli (such as temperature, electricity, light, magnetic field, and so on) to demonstrate the activities. As the representative of the new intelligent soft active polymer materials, shape memory polymer and electro active polymer are showing significant potential. In the review, the actuation methods, applications of SMP in the aerospace field and its composites are introduced; in addition, the recent progress of theoretical studies and aerospace applications of dielectric elastomer are summarized.
Keywords:soft intelligent polymer; composite; aerospace; active deformation; actuation methods
中图分类号:V45
文献标志码:A
文章编号:0367-6234(2016)05-0001-017
作者简介:刘立武(1982—),男,副教授,博士生导师;刘彦菊(1972—),女,博士生导师;冷劲松(1968—),男,博士生导师,长江学者特聘教授.通信作者: 冷劲松, lengjs@hit.edu.cn;
基金项目:国家自然科学基金(11102052, 11272106, 11225211).
收稿日期:2016-03-01.
doi:10.11918/j.issn.0367-6234.2016.05.001
刘彦菊, yj_liu@hit.edu.cn.
猜你喜欢
航空世界(2022年10期)2022-12-08 03:02:30
军工文化(2022年7期)2022-08-24 11:07:08
建材发展导向(2022年2期)2022-03-08 01:44:04
民用飞机设计与研究(2020年1期)2020-05-21 07:24:46
当代陕西(2018年24期)2019-01-21 01:24:26
纤维复合材料(2018年3期)2018-04-25 07:22:58
电子测试(2017年11期)2017-12-15 08:57:13
百科探秘·航空航天(2015年11期)2015-11-07 07:05:36
百科探秘·航空航天(2015年1期)2015-11-07 07:04:02
应用化工(2014年10期)2014-08-16 13:11:29