
非连续大气偏振观测系统硬件设计
2016-05-14 14:00李启丙
企业技术开发·中旬刊 2016年9期
李启丙

摘 要:文章为非连续大气偏振观测系统进行硬件设计。该系统采用数字信号处理芯片作为控制核心,利用位置式高精度角度编码器,实现对大气观测系统的位置高精度测量,采用电源隔离技术,降低了电机启动时对摄像机图像的电磁干扰。实验结果表明,该精密控制系统运行位置伺服精度在0.002 °范围内,满足大气偏振观测系统定位测量要求。
关键词:硬件设计;数字信号处理;角度编码器;电源隔离
中图分类号:TN702 文献标识码:A 文章编号:1006-8937(2016)26-0009-02
1 概 述
本文研究设计一套非连续全天空偏振观测系统的硬件电路,该系统配合软件以实现全天空的非连续偏振模式观测,获取天空偏振模式随时间的变化,为寻找大气中性点提供数据支撑;并利用大气中性点实现地表-大气信息分离。
本系统主要实现对立体空间精密定位系统的设计,采用位置式高精度角度编码器作为转台位移检测工具,采用了位置环和速度环共同组成闭环控制系统。实验结果表明,该精度定位系统运行位置伺服精度<0.002 °,满足大气偏振观测系统的伺服精度要求。
2 控制系统硬件设计
2.1 系统框图
非连续大气偏振观测控制系统框,如图1所示。控制系统包含数字信号处理电路模块、强弱电隔离模块、电机PWM驱动模块、位置检测模块。主控电路模块以TI的DSP芯片TMS28335为核心,其外围电路主要包括:电源模块电路、JTAG接口电路、外部存储器扩展电路、串行通信接口电路、脉冲量、模拟量控制接口、数字模拟转换电路。功率驱动电路包括逆变器主电路、转子位置检测电路等。位置检测模块主要包括霍尔信号接口电路和增量式编码器接口电路。
2.2 电源电路设计
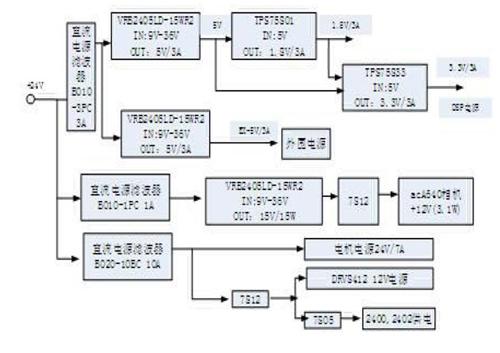
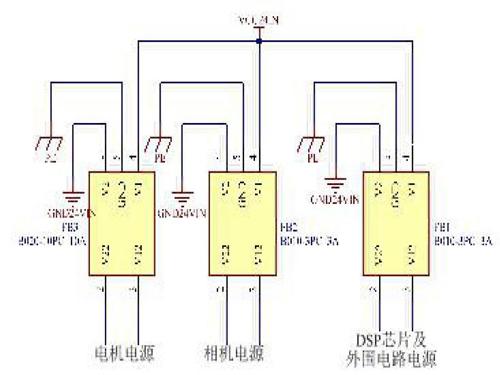
系统电源框图,如图2所示,为了减少电机启动时对相机、DSP芯片的干扰,特通过滤波模块将输入24V电源隔离成3组电源。如图3所示。
对DSP芯片的电源设计,考虑系统的稳定性,TMS2833芯片对电源的上电顺序有一定要求[1]。1.8V的内核电压先于外部IO电压建立,因此我们选用带有使能控制的电源芯片TPS75801和TPS75833。电路图,如图4所示。VCC1V8的电压稳定建立之后,Q2导通,Q1截止,使得TPS75833的使能端EN为高电平,TPS75833才开始工作,VCC3 V3端才能输出3.3 V的电压。
2.3 电机驱动电路设计
本系统分别对方位电机、仰角电机和相机电机三个电机进行控制,为精确定位,三个电机的驱动均采用带PWM控制功能的芯片实现[2]。
对于方位电机和仰角电机使用的是同一型号的电机,其驱动电流峰值达6 A,考虑电路的简单,所以采用TI的DRV8412芯片。TI公司的DRV8412是集成了先进保护系统的高性能双路全桥马达驱动器,功率级的效率高达成协97%。DRV8412双路全桥模式2x3A或并联6A连续模式,PWM频率高达500 kHz,主要用于无刷DC和步进马达,三相永磁同步马达等驱动[3]。电路,如图5所示。
相机的驱动电机电流较小,选用芯片体积较小的DRV8837芯片。DRV8837为摄像机、消费类产品、玩具和其它低电压或者电池供电的运动控制类应用提供了一个集成的电机驱动器解决方案[4]。 此器件能够驱动一个直流电机或其他诸如螺线管的器件。 输出驱动器块由一个配置为H桥的N通道功率MOSFET 组成,以驱动电机绕组。 一个内部电荷泵生成所需的栅极驱动电压。DRV883x能够提供高达1.8 A的输出电流。电路,如图6所示。
2.4 信号的隔离电路
由于此系统是一个光机电系统,为减少信号之间的干扰,采用ADI公司的磁耦芯片ADuM240X系列。ADuM240X系列是采用ADI公司iCoupler技术的四通道数字隔离器。它将高速CMOS与单芯片空芯变压器技术融为一体,具有优于光耦合器等替代器件的出色性能特征。iCoupler 器件的功耗只有光耦合器的1/10至1/6,均可采用2.7 V至5.5 V电源电压工作,与低压系统兼容,并且能够跨越隔离栅实现电压转换功能设计简单[5]。电路,如图7所示。
3 系统定位性能测试
由于其特殊的应用,对于高精密伺服转台,位置伺服精度是最重要的指标之一,应该达到±0.002 °,为此进行了伺服工作试验。根据伺服转台的实际应用环境,由上位机发出位置控制。根据编码器实际返回值来确认当前位置,测试位置伺服误差数据,见表1。伺服误差均值大致为0,误差在以±0.002 °内。达到了精度±0.002 °的要求。
4 结 语
本控制系统采用位置式高精度角度编码器作为转台位移检测工具,采用了位置和速度双闭环PID控制系统。实验结果表明,该系统硬件电路设计满足控制要求,伺服精度在度范围内。满足大气偏振观测系统的伺服精度测量要求。
参考文献:
[1] 马杰.小型直流电机控制电路设计[M].北京:科学出版社,2012.
[2] 符晓,朱洪顺. TMS320F2833XDSP应用开发与实践[M].北京:航空航 天大学出版社,2013.
[3] DRV84x2 Dual Full-Bridge PWM Motor Driver[R].Texas Instrument
s,2015.
[4] DRV8837 LOW-VOLTAGE H-BRIDGE IC [R]. Texas Instruments,
2014.
[5] ADuM2400 datasheet. Analog Device.2005.
猜你喜欢
亚太教育(2016年34期)2016-12-26
中国高新技术企业(2016年31期)2016-12-22
中国高新技术企业(2016年31期)2016-12-22
文理导航(2016年32期)2016-12-19
中国新技术新产品(2016年22期)2016-11-29
科技视界(2016年25期)2016-11-25
科技资讯(2016年19期)2016-11-15
大学教育(2016年6期)2016-07-06
科技视界(2016年13期)2016-06-13
科技视界(2016年12期)2016-05-25
