
无刷直流电机的建模与仿真
2016-05-14 10:48王翥陈颖丽
科技创新与应用 2016年9期
王翥 陈颖丽
摘 要:相对于传统的有刷直流电机,无刷直流电机的特点表现为:使用寿命长、效率更高、低噪声、启动转矩大等特点,在军事,伺服控制、家用电器等领域被广泛应用,文章首先研究无刷直流电机基础结构,其次分析其数学模型,并用Maltab搭建了无刷直流电机控制系统的仿真模型,详细介绍了电机本体,转速控制,转矩计算等模块的功能和实现方法,通过仿真,证明了该模型的可行性。
关键词:无刷直流电机;仿真;模型
1 无刷直流电机的数学模型
以两相导通星形三相六状态为例,设ua,ub,uc是三相定子电压;ea,eb,ec是三相定子反电动势,ia,ib,ic为三相定子电流,La,Lb,Lc是三相定子自感,Lab,Lac,Lba,Lba,Lca,Lca为三相定子绕组互感,Ra,Rb,Rc为三相绕组的相电阻,P为微分算子(d/dt)。
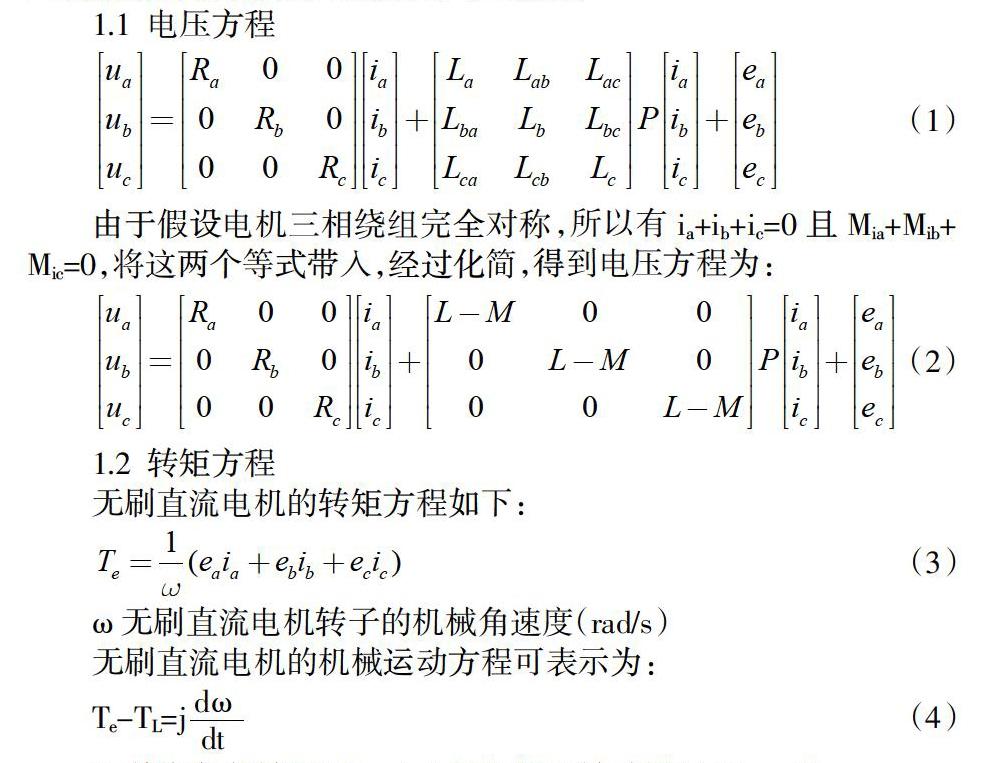
1.1 电压方程
由于假设电机三相绕组完全对称,所以有ia+ib+ic=0且Mia+Mib+Mic=0,将这两个等式带入,经过化简,得到电压方程为:
1.2 转矩方程
无刷直流电机的转矩方程如下:
?棕无刷直流电机转子的机械角速度(rad/s)
无刷直流电机的机械运动方程可表示为:
TL其中负载转矩(N·m);J是电机的转动惯量(Kg·m2)。
2 基于MATLAB/Simulink的无刷直流电机控制系统建模
在MATLAB/Simulink环境下,在了解和分析了无刷直流电机的数学模型后,建立无刷直流电机控制系统仿真模型,该控制系统采用双闭环控制方案,转速环为外环,采用PI调节器,内环是电流环,在建模之前作以下假定:
(1)不计电枢反应,换向过程等的影响;
(2)磁路不饱和,忽略磁滞和涡流的影响;
(3)假设三相绕组,定子电流,转子磁场分布完全对称,气隙磁场为方波;
(4)假设外加电源为理想的直流恒压电源。
根据模块化的思想,系统可以由以下几个子模块构成:
2.1 无刷直流电机本体
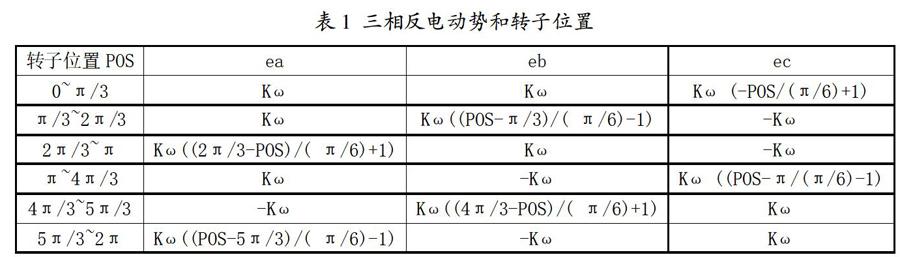
无刷直流电机本体模块是关键的部分。本体模块搭建最重要的部分是三相反电动势的求取。由于不理想的反电动势波形会造成较大的转矩脉动等问题,所以理想的反电动势波形的获得是无刷直流电机仿真建模的关键问题,许多不同的学者在反电动势的求取上作了大量研究,文章采用众多方法中的一种:分段线性法。分段线性法简单易行,该方法的思路是将一个3600的运行周期分为6个阶段,每一个阶段为600,电机所处的运行状态是根据转速和转子位置两个信号确定,并用线性方程来表示反电动势波形,在理想情况二相导通星形三相六状态下,无刷直流电机三相反电动势和转子位置之间满足表1所示关系。
表1中K为反电动势系数,POS是转子位置信号,ω是转速信号,根据以上关系,用MATLAB提供的S-Fuction功能编写一个满足以上逻辑关系的自定义函数。
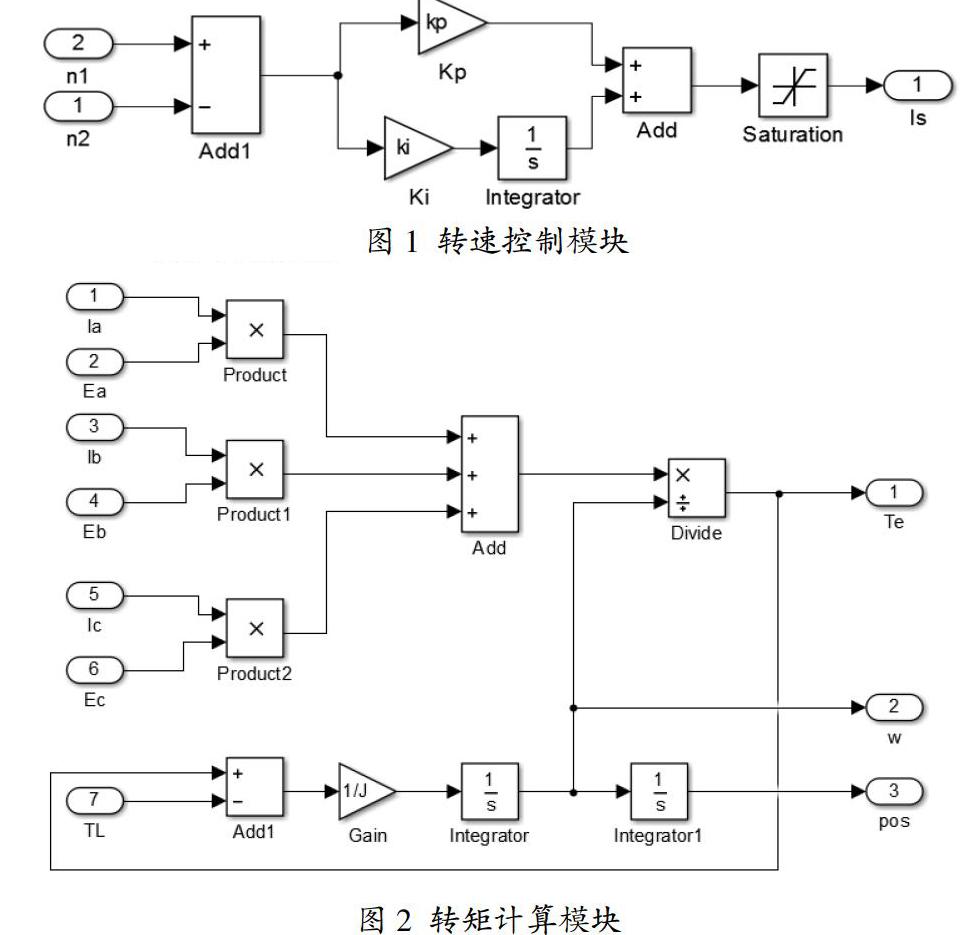
2.2 转速控制模块
转速控制模块如图1所示,它的功能是让实际电机转速跟踪参考转速,实现转速的闭环控制,模块的输入端为反馈转速n1和参考转速n2,它们的差值输入到一个限幅的PI转速调节器,模块的输出为三相参考电流Is。调节器的参数为比例系数Kp和积分系数Ki,为了将输出电流的幅值限定在合理范围内在输出之前加入一个限幅模块。
2.3 转矩计算模块
转矩计算模块的搭建由方程式(3)得到,为了得到Te,必须求得输三相相电流和三相反电动势,三相反电动势已由S-Function部分求得,而三相电流在电机本体模块也已经得到,将这两组参数进行加乘运算即可得到电磁转矩Te,由公式(4)可知,将电磁转矩Te与负载转矩Tl的差值进行积分运算即可得到转速信号ω,求得的转速信号ω积分运算得到电机位置信号POS。如图2所示,
2.4 电压逆变模块
电压逆变器模块如图3所示。模块输入是PWM控制信号,该模块起到功率变换的作用,即电子换向器,具体实现是采用了Simulink中的SimPowerSysterm提供的三相全桥模块,它的输出是A,B,C三相的方波电流。
2.5 电流检测模块
理想情况下可以通过转子的位置角来决定三相电流的反馈值。在二相导通星形三相六状态下当转子位置信号POS的值在0~π/3时,无刷直流电机的非换向相是b相,电流反馈值I就是b相电流绝对值;当转子位置信号POS的值在π/3~2π/3时,无刷直流电机的非换向相是a相,电流反馈值I就是a相电流绝对值;当转子位置信号POS的值在2π/3~π时,无刷直流电机的非换向相是c相,电流反馈值I就是c相电流绝对值。该模块功能由S-Fuction实现。
2.6 电流PWM模块
PI电流控制器的输入为Is与I之差,输出信号为Im,它与一个固定频率的三角载波合成可以生成PWM信号。
将以上各个模块组合起来,搭建起无刷直流电机控制系统的仿真模型,如图5所示。
3 仿真结果
基于MATLAB/Simulink建立的无刷直流电机控制系统的仿真模型,首先对模块中各个参数进行赋值,三相定子电阻r=0.1Ω,三相定子自感L=0.025L, 三相定子互感M=-0.065H,转动惯量J=0.01,反电势系数K=0.086,极对数P=1,额定转速N=3000r/min,直流电源电压为220V。在t=0.1S突加负载,大小为5N。然后对参数赋值后的模型在Simulink中进行仿真,得到系统的三个参数波形,分别为转速N,转矩Te, a相反电动势仿真波形。
由图可知,在N=3000 r/min的给定转速下,系统转速的相应较快且平稳,在t=0.1秒加入的负载的扰动下,转速有所下降,但能很快恢复到平稳状态,稳定运行时无静差,系统表现出了较强的抗干扰能力。系统空载起动时,电磁转矩在很短的时间内进入稳定状态,忽略系统的摩擦转矩,此时的电磁转矩均值为0,在突加负载的扰动下,电磁转矩有一定的脉动,这主要是由电流换向引起的.仿真电流曲线较准确地模拟了由于换向造成地相电流地动态变化,仿真结果符合理论分析,说明了该仿真模型的合理性。
4 结束语
文章在Simulink平台下基于模块化的思想搭建无刷直流电机(BLCDM)模型,该模型反应速度较快,各项参数指标基本符合理论分析,能够较好的模拟无刷直流电机控制系统的工作过程,是进一步分析无刷直流电各种控制算法控制效果的基础。
参考文献
[1]胡双,马志云,周理兵.永磁无刷直流电机系统建模与仿真[J].微特电机,2003(3):21-23.
[2]纪志成,沈艳霞,姜建国.基于MATLAB无刷直流电机系统仿真建模的新方法[J].系统仿真学报,2003,15(12):1745-1749.
[3]包向华,章跃进.基于Simulink的永磁无刷直流电动机及控制系统的建模与仿真[J].电气传动自动化,2005,27(4):30-32.
[4]黄俊.王兆安电力电子变流技术[M].北京:机械工业出版社,2000.
[5]齐蓉,周素莹,林辉,等.无刷直流电机PWM调制方式与转矩脉动关系研究[J].微电机,20006,39(1):58-61.
作者简介:王翥(1991-),男,汉族,湖北荆州市人,在校研究生,工学硕士,单位:武汉理工大学自动化学院,研究方向:电气工程及其自动化。
猜你喜欢
小天使·三年级语数英综合(2022年4期)2022-04-28
初中生世界·九年级(2020年2期)2020-04-10
汽车导报(2017年5期)2017-08-03
高中生学习·高三版(2017年4期)2017-04-14
求学·理科版(2017年1期)2017-03-02
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
