
无人机输电线路巡检中安全距离测量方法
2016-05-11 03:32林靖宇高鹏宇卢子广
广西大学学报(自然科学版) 2016年2期
李 栋,林靖宇,高鹏宇,卢子广
(1.广西大学电气工程学院, 广西南宁530004; 2.广西电网公司梧州供电局, 广西梧州543002)
无人机输电线路巡检中安全距离测量方法
李栋1,林靖宇1,高鹏宇2,卢子广1
(1.广西大学电气工程学院, 广西南宁530004; 2.广西电网公司梧州供电局, 广西梧州543002)
摘要:针对无人机输电线路巡检中无人机与输电线路之间安全距离的测量问题,提出一种基于成像模型的单目视觉测量方法。采用图像处理技术,从无人机拍摄的图像中识别出无人机输电线路巡检中输电线杆塔,以此建立了输电线路的成像模型,并在已知输电线杆塔实际高度的前提下,由模型中的成像几何关系推导出了无人机距离输电线路竖直平面的安全距离。与传统的基于GPS坐标或基于激光测距的方法相比,降低了模型的计算复杂度和系统的硬件需求,提高了在复杂地理环境下系统的稳定性和检测精度。实验结果表明,该方法能准确测量安全距离且平均检测误差仅为2.63%。
关键词:输电线路;无人机;安全距离
随着经济的快速发展,社会对电力的需求激增,电力线路正大幅扩建。而中国国土辽阔,输电线路将穿越各种复杂的地形环境,传统的输电线路巡检方式不能有效满足需求,从而促进了无人机输电线路巡检方式的出现,它很好地解决了复杂地形环境下输电线路巡检的难题[1-3]。然而,远距离的户外高压输电线路巡检对无人机飞行的安全性要求非常高,如何准确地测量无人机巡检中无人机相对高压输电线路的安全距离,避免无人机对输电线路的安全威胁,成为影响无人机输电线路巡检系统发展的关键因素[4]。
现有的无人机输电线路巡检系统中,在距离测量和轨迹规划方面,通常采用激光测距和GPS导航来确认无人机的巡检飞行轨迹以及与目标物障碍物的距离。激光测距虽然精度高,但成本较大,且增加了无人机的负载,降低了无人机的飞行效率。文献[5]介绍了基于GPS的坐标转换来进行输电线和杆塔的轨迹跟踪,通过对目标物大地坐标、球心直角坐标系和站心地平直角坐标系之间的转换可计算地球表面两点之间的距离,从而亦可计算得到点与面之间的距离。但GPS本身存在精度误差,工业上通常用的非差分定位的GPS导航系统精度大约在2.5 m,当设定的安全距离在50 m以内时其最大相对误差超过10%,且距离越近相对误差越大。因此,此方法更适合于固定翼飞机的远距离测距,而且在复杂山区地形中存在GPS信号弱、容易受干扰等问题,基于激光或GPS定位的测距方法不能很好地解决无人机输电线路巡检中无人机与输电线路平面安全距离的测量问题。基于多旋翼无人机的输电线路巡检系统中关于安全距离的具体指标尚无统一标准,实际应用中考虑到图像的清晰度与飞行的安全性,无人机与输电线路通常保持10~30 m的作业距离,在此作业距离下采用基于机器视觉的测距方法精度更高。针对此问题,本文提出基于单目视觉测距的检测方法,建立了无人机输电线路巡检中输电线路的成像模型,采用图像处理技术从无人机采集得到的输电线路图像中识别出杆塔,在已知输电线杆塔实际高度的条件下由模型中的成像几何关系推导计算出了无人机距离输电线路竖直平面的安全距离。最后,通过实验验证了本文所提出测距方法的准确性和可行性。
1检测原理
输电线路无人机巡检中安全距离是指无人机与输电线路竖直平面之间的水平距离。如图1所示,由任意相邻两输电线路杆塔即可确定与巡检无人机当前位置相对应的输电线竖直平面,随着巡检位置的不同,输电线路竖直平面随着输电线路轨迹变化。本文提出的算法可实时测量无人机输电线路巡检中随时变化的巡检安全距离。输电线杆塔的实际高度符合国家规定的已知高度。在此前提下,首先通过图像处理来识别图像中的输电线杆塔,并测量杆塔的图像高度以及相邻杆塔的图像距离,然后基于小孔成像原理分别计算得到相邻两杆塔在无人机机载摄像机中的像距以及实际物距,最后根据输电线杆塔的成像几何模型,可计算得两相邻目标杆塔在摄像机成像中心处的夹角,结合杆塔物距并经三角形计算,可以得到摄像机距离两输电线杆塔平面的水平距离即巡检安全距离。
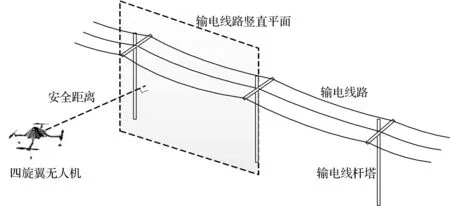
图1 无人机巡检示意图
输电线路无人机巡检系统中采用四旋翼飞行器、无人机搭载单目摄像机来拍摄输电线路图像。摄像机保持竖直方向,使得摄像机成像平面与输电线路竖直平面平行。摄像角度为面向输电线路平面,且保证摄像视野总有至少两个输电线杆塔。拍摄照片可用机载嵌入式系统计算处理,或者经过图传与数传系统将图像传输回地面基站计算处理,从而实时控制无人机沿输电线路保持安全距离飞行。
1.1小孔成像模型
摄像机成像模型可以用小孔成像模型表示,如图2所示。其中,H 为目标实际高度,h 为成像高度,u 为物距,v 为相距,式中f 为相机焦距。由相似三角形关系以及相机物距、像距与焦距的关系可得以下方程组:

(1)
在已知目标杆塔实际高度H以及相机焦距f的情况下就可解得输电线杆塔物距和像距分别为:

(2)
其中,当目标物实际高度H较大时,像距v可用焦距f近视表示。
1.2航拍成像模型
航拍摄像机成像模型图如图3所示。其中,杆塔A、B在摄像机成像平面分别为像A、像B, l 是像A到像B的图像距离,θ0为像A与像B在摄像机成像中心处的夹角,θ 是杆塔A和杆塔B在摄像机成像中心处的夹角,α为摄像机到输电线杆塔B的物距直线与输电线路竖直平面的夹角,ua、ub、va、vb分别为输电线杆塔A、B的物距和像距,L为输电线杆塔A到杆塔B的实际距离,x为所求的摄像机到输电线路竖直平面的水平距离。

图2小孔成像模型图
Fig.2Pinhole imaging model diagram

图3航拍成像模型图
Fig.3Aerial imaging model diagram
2测量算法
在摄像机竖直拍照的前提下,摄像机成像平面与输电线路竖直平面平行,由摄像机成像原理可知,在已知实际输电线杆塔高度H的情况下,通过测量图像中输电线杆塔A、B的图像高度ha和hb,由式(2)可计算得相机距输电线杆塔A、B的物距分别为ua=(H+ha)f/ha,ub=(H+hb)f/hb,像距分别为va=(H+ha)f/H ,vb=(H+hb)f/H ,根据三角形余弦定理可计算出夹角θ0,即可由三角形对角相等求得θ,再结合三角正弦定理与余弦定理可计算得到α与L,即可计算出安全距离x。具体方程组为:

(3)
化简可以求得无人机离输电线路的安全距离x为

(4)
算法流程如图4所示。在无人机巡检飞行控制系统中,本算法用于实时测量无人机与输电线路的实际距离x(t),并与设定的安全距离x0相比较,得到实时误差e(t),从而实时控制无人机巡检的安全飞行。在视觉测距算法中,对图像处理的目的是从复杂背景中识别出输电线杆塔并对杆塔的图像尺寸进行测量。首先,须对图像进行预处理,包括对输电线路图像进行平滑滤波、消除部分噪声、对常见的金属杆塔或者水泥杆塔灰度进行分析、通过分段图像增强等处理将图像转化为特定的灰度图像、进行图像形态学处理、通过腐蚀膨胀操作去除部分边缘噪声得到连通的完整的区域;设置合适的阈值进行边缘检测,由于输电线路杆塔通常是竖直方向的,因此,在杆塔识别时可直接排除倾斜的或横向的树木枝干的干扰;在得到的二值图像中对杆塔的边缘进行准确定位,实现在复杂背景中输电线路杆塔轮廓的提取;然后,在图像坐标系下确定各杆塔边缘的图像坐标,对于部分模糊的边缘,可采用均值处理,以减小检测误差;最后,可计算得到输电线杆塔的图像高度以及相邻两杆塔的图像距离。
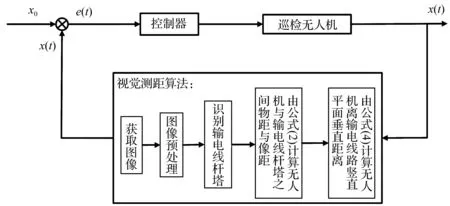
图4 算法流程
3实验分析
算法实验验证中采用Pentax k50单反相机拍照,其影像感应器的尺寸为23.7 mm×15.7 mm,拍摄的照片分辨率为3456×2304 pix。为了便于计算图像距离,统一单位为mm。在图像坐标系中,由像素单位到毫米单位的转换规则中,在x轴的转换系数为kx=23.7/3456mm/pix,y轴的转换系数为ky=15.7/2304mm/pix。实验中,以相邻两个路灯杆塔模拟输电线路杆塔为例来验证本论文方法正确性及实用性。图5为距离两杆塔一定距离侧向一定角度竖直拍摄的图像,经过图像处理后初步识别出杆塔位置。取摄像机焦距分别为24 mm和35 mm,距离两杆塔不同距离不同侧向角度的多个位置进行定焦拍照测距。通过多组实验来验证本论文算法可靠性,其具体测量距离与实际距离对比如表1所示。

图5 图像处理图
由表1可知,实验中平均测量误差率为2.63%,最大测量误差率为6.57%,在实际误差允许范围内。较普通工业级GPS系统中2.5 m的误差范围(GPS坐标转换的测距方法在此实验距离范围内其相对误差最大可达30%),本文提出的测距方法在检测精度上有了很大的提高。实验中考虑到实际室外拍摄的操作误差以及标准实际距离的测量误差等因素的影响,该测量算法基本能实现无人机与输电线路安全距离的测量。实验验证了该方法的准确性和有效性。
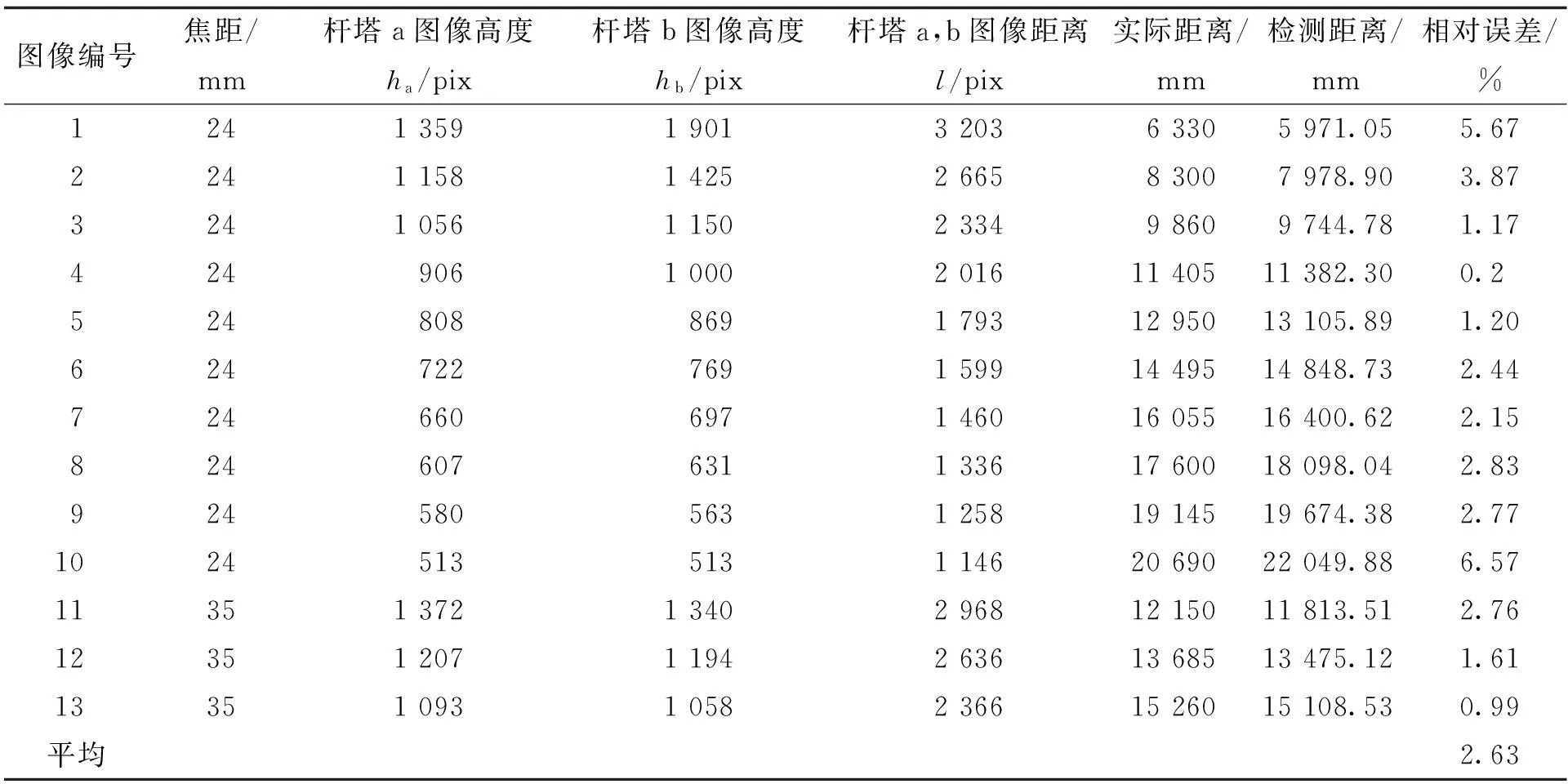
表1 测距实验结果
对实验中存在的测量误差进行分析发现,测量误差产生的主要原因有如下几点:①图像识别测量中存在图像噪声,如拍照的运动模糊等,影响了图像识别时杆塔边界的准确定位,从而影响图像距离的测量精度;②摄像机成像平面不完全处于竖直平面,而是存在一定的倾斜角度,影响小孔成像中物距和像距的计算精度;③由于是侧向定焦拍照,两杆塔有时无法同时处于对焦位置,存在部分图像模糊;④在本研究中标准实际距离是采用卷尺测量杆塔平面到摄像机的距离,实际距离自身存在测量误差。以下对各误差因素做进一步的实验分析,以验证算法的实际可行性。
3.1在输电线路无人机巡检中摄像机的拍摄角度对测距精度的影响
在输电线杆塔落在摄像机视野中的前提下,成像平面始终处于竖直方向,摄像机在水平面的旋转和竖直平面内的旋转对测量精度并无影响,而在摄像机俯仰角度的变化则对检测误差有影响。由图2小孔成像模型可知,当摄像机成像平面有俯仰倾斜时,两三角形不再相似,则不能得出方程式(1),则此算法计算有误。当目标物的实际尺寸远大于图像尺寸时,在一定俯仰角度内此误差可以忽略。如图6所示,在目标杆塔始终落在视野中的前提下,取6个不同倾斜角度拍摄照片,以竖直平面正视图6(c)为基准,图6(a)、(b)为仰视图,图6(d)、(e)、(f)为俯视图,当改变拍摄倾斜角度时,测量距离的相对误差变化量如表2所示,可知改变俯仰拍摄角度时,随着角度的变大则检测误差也变大,实验中最大相对误差变化量为2.18%,可见其相对误差变化范围较小,即当目标杆塔的全部在视野中的条件下,拍照俯仰角度的变化对实际的检测精度影响不大,由此产生的误差可以忽略。
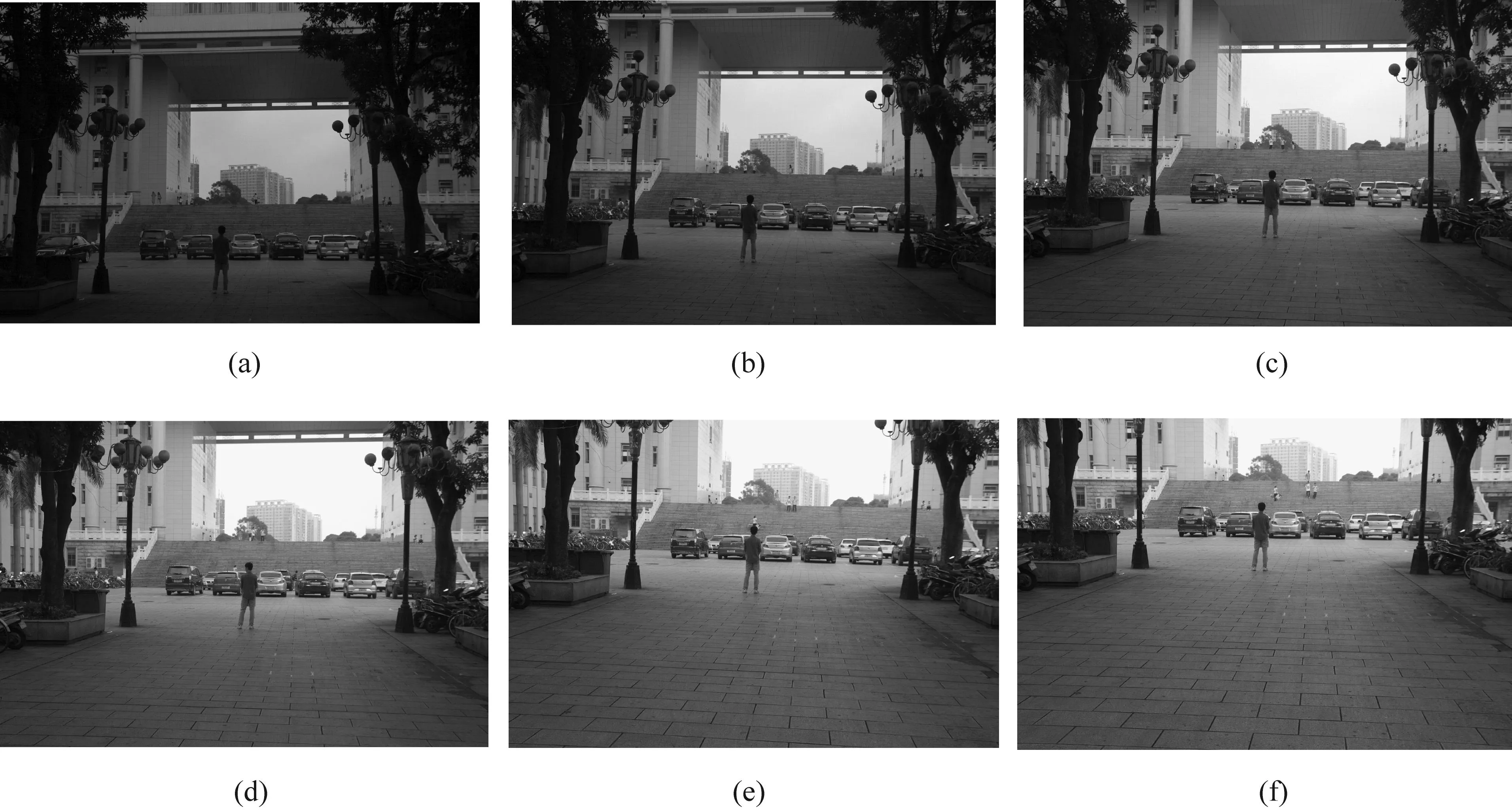
图6 不同俯仰角度拍摄图

图号图7(a)图7(b)图7(c)图7(d)图7(e)图7(f)相对误差变化量/%1.230.3000.130.962.18
3.2图像处理中输电线杆塔的识别精度对测距精度的影响
取表1中第13组实验数据进行分析,模拟不同图像识别精度,依次将图像检测中的两杆塔高度ha、hb以及两杆塔之间的图像距离l减小或增加10pix,比较测量误差的变化情况。实验结果如表3所示,可见最大相对误差变化仅为0.979%。分析可知,由于图像噪声或运动模糊等造成的图像检测误差对最终的安全距离计算结果影响不明显,该方法不完全依赖与图像检测精度,具有较高可靠性。

表3 图像检测精度误差分析
3.3输电线杆塔实际高度的测量精度对测距精度的影响
在实际应用中杆塔的实际距离通常受植被环境影响或者制造工艺的影响,导致与标准规格值之间存在一定误差,且每个杆塔的误差不同。本实验中取表1中第13组实验数据进行分析,分别将两杆塔的实际杆塔高度Ha和Hb增大或者减小100 mm,分析比较其相对误差变化。由表4可知,改变杆塔实际高度,其相对误差最大为4.029%,相对误差变化率最大为3.038%。由此可知,杆塔实际高度的测量误差对系统安全距离的测量误差影响较小,该方法具有较高实用性。
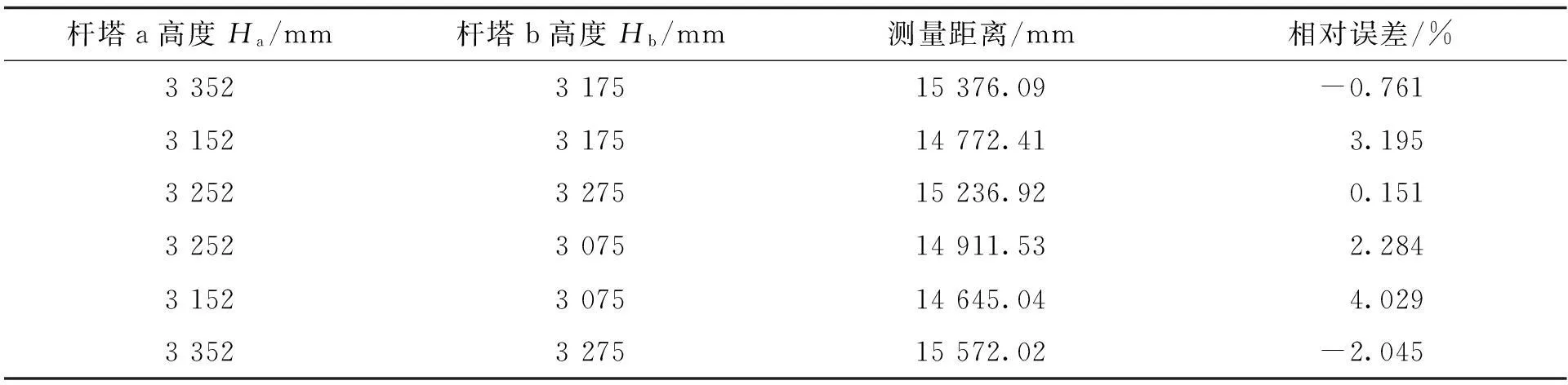
表4 杆塔实际高度误差分析
4结语
本文针对无人机输电线路巡检中安全距离测量这一关键问题提出了一种基于图像的单目测距方法。该方法通过图像处理技术识别出输电线路图像中的输电线杆塔,建立了输电线路的成像模型,在已知输电线杆塔实际高度的条件下由此模型推导计算出了无人机与输电线路竖直平面的安全距离。该方法具有较低的运算复杂度,相比激光测距方法降低了系统硬件需求,降低了成本。在多旋翼无人机输电线路近距离巡检中,相比GPS坐标转换方法在近距离测量中提高了检测精度,在复杂户外环境下降低了对GPS信号的依赖性。此外与传统的输电线跟踪算法不同,本算法是基于目标更大,形状结构更规则的输电线杆塔的识别,大大降低了目标识别的难度。本研究采用路灯杆塔模拟了输电线路杆塔进行算法验证,表明该方法能准确测量安全距离,实验中检测的平均相对误差仅为2.6%,且具有较高的检测精度,提高了无人机输电线路巡检的安全性以及巡检效率。
参考文献:
[1]郑贵林,张丽.自旋翼飞机电力巡线技术研究与应用[J]. 中国电力, 2014 (7): 26-31.
[2]汤明文,戴礼豪,林朝辉,等.无人机在电力线路巡视中的应用[J]. 中国电力, 2013 (3): 35-38.
[3]王振华,黄宵宁,梁焜,等.基于四旋翼无人机的输电线路巡检系统研究[J]. 中国电力, 2012 (10).59-62.
[4]沈建,刘伟东,刘鸿斌,等.真升机巡视 1000KV 交流特高压线路的安全作业距离[J]. 中国电力, 2011, 44(5): 41-45.
[5]吕明,盛戈皞,张卫东,等.无人飞行器巡检输电线路的杆塔和导线跟踪算法[J]. 电力系统自动化, 2012, 36(9): 92-97.
[6]ZHANG M,LIU H H T.Vision-based estimation of ground moving target by multiple unmanned aerial vehicles[C]//American Control Conference (ACC), 2012 IEEE Conference.Montreal, QC, Canada: IEEE Conference Publications, 2012: 1737-1742.
[7]陈斯雅,王滨海,盛戈皞,等.采用图像摄影的输电线路弧垂测量方法[J]. 高电压技术, 2011, 37(4): 904-909.
[8]姜明新,王培昌,王洪玉.基于视频多目标跟踪的高度测量算法[J]. 电子学报, 2015, 43(3): 591-596.
[9]庄严,卢希彬,李云辉.移动机器人基于三维激光测距的室内场景认知[J]. 自动化学报, 2011,37(10):1232-1240.
[10]胡永彪,张文祥,金守峰,等.基于机器视觉的工程机械行走速度测量方法[J]. 广西大学学报: 自然科学版, 2012, 37(5): 907-912.
[11]PANAHANDEH G,,JANSSON M.Vision-aided inertial navigation based on ground plane feature detection[J]. Mechatronics, IEEE/ASME Transactions on, 2014, 19(4): 1206-1215.
[12]苏庆华,赵剡,杨奎,等.单幅散焦图像深度计算方法[J]. 红外, 2013, 34(5): 16-22.
[13]邹强.飞行器远程图像距离测量方法研究[J]. 微电子学与计算机, 2012, 29(5): 193-196.
[14]郭磊,徐友春,李克强,等.基于单目视觉的实时测距方法研究[J]. 中国图象图形学报, 2006, 11(1): 74-81.
[15]XIAO YI D,QIN HUA Z.Research on laser-assisted odometry of indoor UAV with monocular vision[C]//Cyber Technology in Automation, Control and Intelligent Systems (CYBER), 2013 IEEE 3rd Annual International Conference on. Nanjing, China.IEEE Conference Publications, 2013: 165-169.
[16]吴建.基于区域生长算法的彩色遥感图像分割[J]. 广西大学学报: 自然科学版, 2011, 36(6): 981-986.
[17]WAHAB M N A,SIVADEV N, SUNDARAJ K.Target distance estimation using monocular vision system for mobile robot[C]//Open Systems (ICOS), 2011 IEEE Conference on.Langkawi, Malaysia: IEEE Conference Publications, 2011: 11-15.
(责任编辑裴润梅)
Safe distance measurement for power transmission line inspection by UAVs
LI Dong1,LIN Jing-yu1,GAO Peng-yu2, LU Zi-guang1
(1.College of Electrical Engineering, Guangxi University, Nanning 530004, China;2.Wuzhou Power Supply Bureau, Guangxi Power Grid Corporation, Wuzhou 543002,China)
Abstract:Aiming at the problem of measuring the safe distance between UAV and transmission line, a new monocular camera method which based on imaging model is proposed. The method use the image processing technology to identify transmission line towers in the images which captured by the UAV. Then the imaging model of transmission line in UAV transmission line inspection is established. Once the actual height of towers is known, the safe distance between UAV and the vertical plane of transmission line can be calculated by using this imaging geometry model. Compared with the traditional method which based on GPS coordinates or laser ranging method, the method can reduce the computational complexity and hardware requirements of the system. And it can improve the stability and accuracy of the system. Experimental results show that the distance measuring average error is only 2.63%.
Key words:transmission line; UAV; safe distance
中图分类号:TM755
文献标识码:A
文章编号:1001-7445(2016)02-0498-08
doi:10.13624/j.cnki.issn.1001-7445.2016.0498
通讯作者:林靖宇(1972-),男,福建福州人,广西大学副教授;E-mail:jylin@gxu.edu.cn。
基金项目:国家自然科学基金资助项目(51177018);广西科技攻关项目(桂科攻1598008-1)
收稿日期:2015-09-12;
修订日期:2015-11-08
引文格式:李栋,林靖宇,高鹏宇,等.无人机输电线路巡检中安全距离测量方法[J].广西大学学报(自然科学版),2016,41(2):498-505.
猜你喜欢
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
企业导报(2016年9期)2016-05-26
