拖曳式诱饵干扰机理及其时频特性分析*
2016-05-10 01:46:04宋志勇国防科学技术大学ATR重点实验室湖南长沙410073
航天电子对抗 2016年1期
宋志勇,苏 剑,付 强(国防科学技术大学ATR重点实验室,湖南长沙410073)
拖曳式诱饵干扰机理及其时频特性分析*
宋志勇,苏剑,付强
(国防科学技术大学ATR重点实验室,湖南长沙410073)
摘要:拖曳式诱饵干扰通过与目标协同运动形成雷达波束内的两点源,诱骗雷达波束指向,实现真正意义的角度欺骗。以典型拖曳式有源雷达诱饵为例,首先通过对拖曳式诱饵干扰流程、干扰原理以及样式的分析,揭示干扰的本质和特点;然后在两种典型动态场景下,从静止三角几何以及动态过程两方面详细分析了干扰的时频特性,揭示了目标与诱饵特征差异的变化规律,为干扰对抗提供了基本条件。
关键词:拖曳式诱饵;干扰机理;干扰样式;时频特征
0 引言
拖曳式有源雷达诱饵(TRAD)是一种新型角度欺骗干扰技术,具有高效能、强可控性、低成本等优点,通过模拟目标的飞行特征以及雷达散射特性,减小目标与诱饵之间的特征差异,形成雷达波束内不可分辨的两个点源,以足够的保真度激励、误导和诱骗雷达天线电轴偏离目标而指向诱饵,从而保护目标的安全[1]。本文以典型拖曳式有源雷达诱饵干扰为例,分析诱饵的干扰流程、原理以及样式,揭示了拖曳式诱饵的干扰机理,并通过分析干扰过程中目标和诱饵的时频特性,获得了干扰与目标之间的距离和多普勒差异变化规律,为提取特征差异、实现干扰对抗提供了基本条件。
1 干扰流程分析
从目标与干扰的空间位置关系来看,拖曳式诱饵干扰属于载体外干扰,通过将干扰机与目标分离配置,可有效干扰雷达的角度跟踪系统,诱骗雷达错误导引,从而保护目标安全,其诱骗雷达的过程大致分为四个阶段,如图1所示[2]。
阶段①:目标上的告警系统指示受到雷达照射,释放拖曳式诱饵,诱饵接收雷达发射信号,根据干扰逻辑进行干扰信号生成并发射。此时诱饵与目标之间的间距很小,干扰信号将比较容易捕获雷达跟踪波门,有效“吸引”雷达波束照射。
阶段②:捕获波门后,目标通过机动飞行形成目标、诱饵、雷达之间的干扰三角态势。机动的目的一方面是为了避开由于目标对诱饵遮挡形成的圆锥形盲区;另一方面则是为了拉大目标与诱饵之间的角度间隔,对雷达形成更好的角度欺骗。
阶段③:随着机动的进行以及雷达与目标、雷达与诱饵之间距离的接近,目标与诱饵之间的张角逐步增大。由于干扰信号的功率比目标回波信号功率大很多,雷达波束中心将偏向诱饵,致使目标逐渐向雷达波束边沿移动。
阶段④:随着雷达与目标、雷达与诱饵之间距离的进一步减小,当目标与诱饵之间的张角增大到一定程度时,目标将逃离雷达波束照射范围,波束内将只存在诱饵,雷达完全丢失目标。
图1 拖曳式诱饵干扰诱骗过程
2 干扰原理分析
拖曳式诱饵的最大威胁在于其可以实现真正意义上的角度欺骗,而目标角度的获取是通过测量目标雷达回波信号的相位波前方向并以此确定目标的方向为垂直于波前的方向来实现的,相位波前畸变将严重影响雷达的测角性能。拖曳式诱饵实质上就是通过控制目标和诱饵,使其形成波束内的两点源而导致接收回波的相位波前发生畸变,产生测角误差。根据干扰信号与目标回波在相位上的相互关系,在干扰过程中,当诱饵采用应答干扰模式时,目标回波与干扰信号非相干,形成的是非相干两点源干扰;当诱饵工作于转发模式时,由于径向速度大,相对运动剧烈,目标与诱饵的相对位置不断变化,干扰与目标同样不具备稳定的相位关系,因此也属于非相干两点源干扰。下面以振幅和差单脉冲测角系统为例分析非相干两点源的干扰原理。当目标释放诱饵后,目标和诱饵形成雷达视场内的空间两点源,分别用S1和S2表示,其方向图及波束位置如图2所示[3]。设两个波束的方向性函数分别为F(θ-θ0)和F(θ+θ0),其中θ为目标与电轴的角距离,θ0为波束1和波束2最大值点偏离等信号轴的角距离,θ1、θ2分别为S1和S2在波束内的角度,Δθ为两点源之间的角度间隔。
图2 单脉冲雷达天线方向图
设φ1、φ2分别为S1和S2在雷达天线口面处信号的相位,则天线1和2的接收信号可分别表示为:
式中,AS1、AS2分别表示S1和S2的信号幅度。
经过波束形成网络可获得E1、E2对应的和路信号E∑和差路信号EΔ分别为:
将天线方向图在θ0方向展开成幂级数,并取其一阶近似,则有[4]:

令θ1=Δθ/2+θ,θ2=Δθ/2-θ,且定义两点源信号的幅度比β=AS1/AS2。则和、差信号E∑和EΔ经混频、中放、检波、低通滤波后输出的误差信号为[5]:
当误差信号Se(t ) = 0时,雷达波束中心指向相对于两个点源中心线的偏离角θ为:

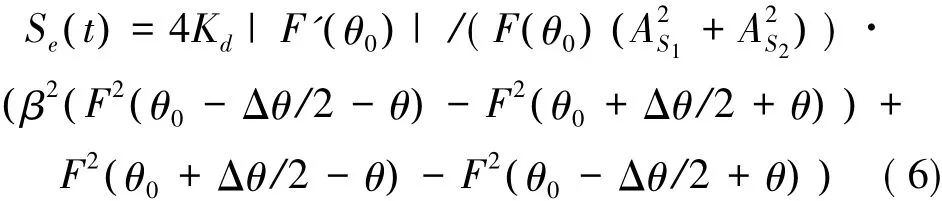
由式(7)可得当两个非相干点源的角度间隔在雷达半功率波束宽度内变化时,天线波束指向与角度间隔Δθ以及幅度比β之间的关系,如图3所示。
图3表明非相干两点源干扰下,单脉冲雷达天线电轴将指向两点源的能量重心。当幅度比β=1时,无论角度间隔为多少,波束中心都将指向两点源连线的中点位置。幅度比不为1时,波束中心将指向二者的能量重心,能量越大的点源,波束指向越靠近其位置。可以看到,在非相干条件下,不需要很大的振幅比,强干扰源就可以将雷达天线波束诱骗偏离目标位置[6]。实际中为确保诱饵能够有效诱骗雷达,通常要求雷达接收到的诱饵干扰功率与目标回波功率的比值K(称为干扰压制比)大于1,典型值为K=2~10。在此强压制比条件下,天线电轴将偏离目标而指向功率更大的诱饵,造成制导错误。
图3 非相干诱骗下波束指向与幅度比的关系
3 干扰样式分析
拖曳式有源雷达诱饵的干扰信号生成分为恒功率和恒增益两种体制。恒功率体制是指干扰信号由干扰发射机的压控振荡器产生,始终以发射机的峰值功率产生干扰信号;恒增益体制是指诱饵通过对接收到的雷达信号进行恒定倍数的放大来产生干扰信号。下面分析这两种干扰样式下雷达接收回波的干信比变化情况。
设某一时刻雷达、目标、诱饵之间的几何位置关系如图4所示。
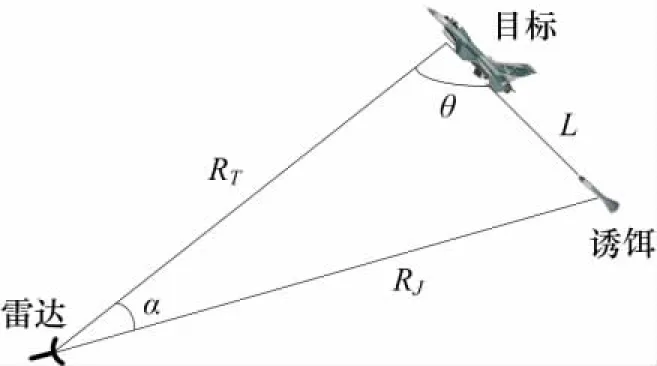
图4 雷达、目标和诱饵的三角态势
雷达天线增益Gt与其有效孔径A满足Gt= (4πA) /λ2,其中λ为雷达波长。设雷达发射功率为Pt,目标的雷达截面积为σt,则由图4可知雷达接收到的目标回波功率为[7]:


恒功率干扰体制下,诱饵始终以发射机峰值功率产生干扰信号,则雷达接收到的诱饵干扰信号功率为:式中,PJ为诱饵干扰峰值功率,GJT为诱饵发射天线增益,γJ为极化损失系数。由式(8)~(9)可得雷达接收回波干信比为:

式(10)表明,恒功率体制下干扰信号为单程传输,而目标回波信号为双程传输,随着距离的减小,干信比呈现不断减小的趋势。
恒增益干扰体制下,诱饵的干扰信号是通过对接收信号进行固定增益的放大来产生的。设诱饵接收天线增益为GJR,则诱饵接收到的雷达发射信号功率为:

式中,σJ表示诱饵接收天线的RCS,RE为诱饵接收天线与雷达之间的距离。对于收发天线一体的诱饵,RE=RJ;对于收发天线分置的诱饵,RE=RT。设诱饵干扰信号生成的放大增益为GJ,诱饵发射天线增益为GJT,则雷达接收到的干扰信号功率为:
式中,G∑表示诱饵的总增益。
则由式(8)和式(12)可得恒增益体制下雷达接收回波的干信比为:

近距情况下诱饵发射功率随距离的减小而迅速上升,在某一距离上诱饵发射功率达到最大值时,发射机将饱和,此时恒增益干扰方程将变为式(9)所示的恒功率干扰方程。
4 干扰时频特性分析
拖曳式诱饵干扰过程中,诱饵作为雷达视场内的一个“假目标”,其干扰信号与真实目标回波在时频特征上存在一定的相互关系。为避开目标遮挡形成的圆锥形干扰盲区,诱饵需要通过目标的机动形成干扰三角态势,空间三角关系的存在及其变化使得目标和诱饵的时频特征存在差异且不断变化。迎头和尾追两种典型动态场景下的静止几何关系如图5所示[8]。
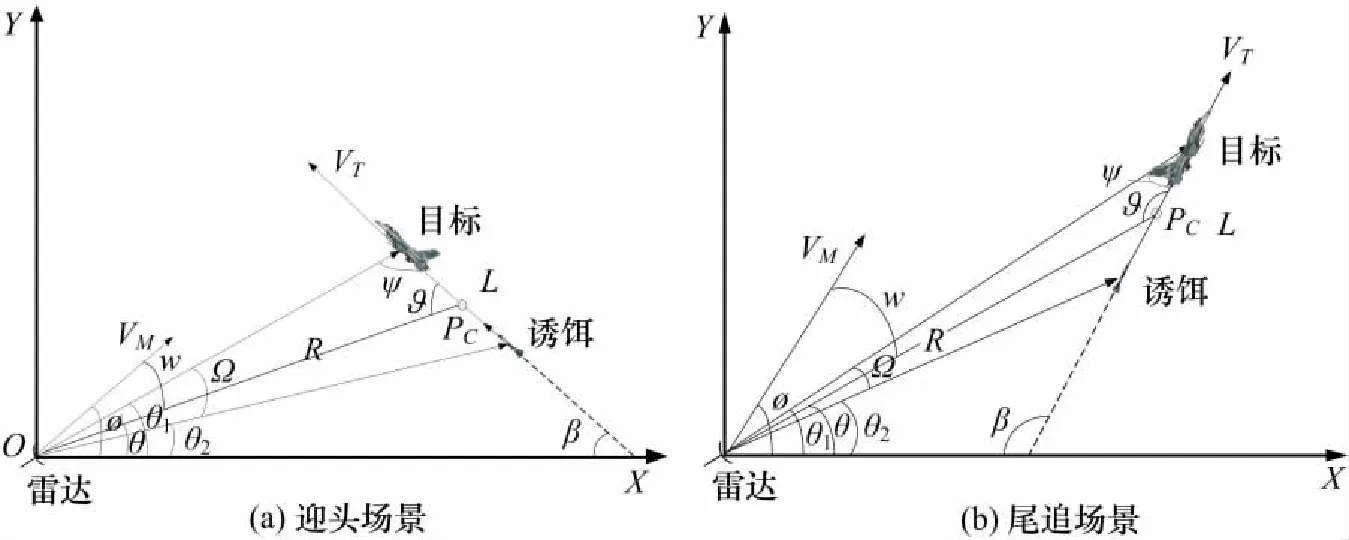
图5 干扰过程中雷达、目标和诱饵的几何关系图
图5中诱饵在目标的拖曳下飞行,二者的速度方向与水平线的夹角为β,大小为VT;雷达波束中心指向二者能量重心,在目标与诱饵连线上的交点为PC,拖曳线长度为L。雷达与目标的相对距离为RT,雷达与诱饵的相对距离为RJ,雷达与目-诱能量重心的相对距离为R,雷达速度方向与水平线的夹角为φ,大小为VM;Ω=θ1-θ2为目标和诱饵相对于雷达的张角,w=φ-θ表示天线转角,即视线方向和航向的夹角,w∈[0,π/4 ]。
干扰的时域特征主要指诱饵与雷达之间的相对距离变化特征,雷达与目标的距离通过计算雷达接收到的干扰信号的时延来确定。干扰信号的时延还包括信号生成的处理时延以及信号的线缆传输时延。由图5可知,雷达-目标几何距离RT与雷达-诱饵几何距离RJ之间的关系为:

式中,迎头条件下ψ∈[π/2,π ],尾追条件下ψ∈[0,π/2 ]。
设干扰信号生成的处理时延为tp,通常为100~200ns量级,则对于收发一体诱饵,雷达-目标距离与雷达-诱饵距离之间的差异为:

对于收发分置诱饵,由于存在信号的传输时延,雷达-目标距离与雷达-诱饵距离之间的差异为:

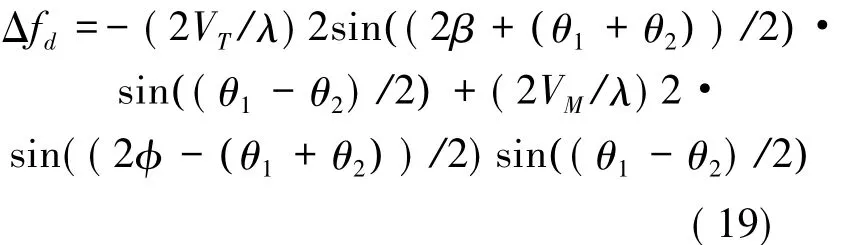
干扰的频域特征主要指诱饵相对于雷达的多普勒频率变化特征。干扰过程中,目标与诱饵之间剧烈的相对运动以及三角几何关系变化导致干扰信号的多普勒频率呈现时变特性。设在单次处理周期内,VT、VM和φ的大小均保持不变,则迎头和尾追场景下目标和诱饵的多普勒频率可分别表示为:


式中,迎头条件下β+θ1,β+θ2∈[0,π/2 ],尾追条件下β+θ1,β+θ2∈[π/2,π ]。利用三角函数关系展开,可得目标多普勒频率与诱饵多普勒频率的差值为:
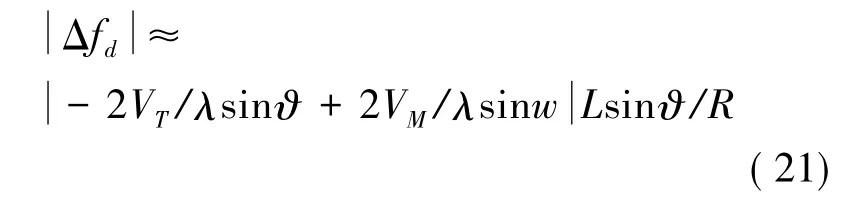
由于Ω通常比较小,则近似sinΩ≈Ω和θ1+θ2( ) /2≈θ成立,式(19)可进一步简化为:

设拖曳线长度为L,则Ω≈Lsin(β+θ ) /R = Lsin/ R,式(20)可表示为:
上述分析结合雷达、目标和诱饵之间的三角几何关系给出了场景条件下干扰的时频特性以及目标与干扰的特征差异。实际干扰过程中,雷达的飞行受到制导律以及过载的限制,目标和诱饵的运动也受到运动模型、机动加速度的制约,因此干扰的时频特性需要结合导引控制以及碰撞三角约束来共同考虑[9]。
下面分析在迎头和尾追两种典型动态场景下干扰信号的动态时频特性,动态场景以及相关参数设置如下:
初始位置:迎头场景下,雷达: (0,0,0),目标: (9880m,1000m,1000m),诱饵: (10000m,1000m,1000m) ;尾追场景下,雷达: (0,0,0),目标: (10120m,1000m,1000m),诱饵: (10000m,1000m,1000m)。
飞行速度:雷达: 1000m/s,目标: 300m/s,诱饵: 300m/s,目标、诱饵的法向加速度: 6g m/s2。
波束宽度: 6°,扰生成延时: tp=150ns,比例导引系数: 3,拖曳线长度L: 120m,干扰压制比: 6。
动态场景定义为:雷达与目标的初始距离为10km,0时刻目标释放诱饵并开始拖曳着诱饵进行匀速直线运动,迎头情况下其运动方向与雷达方向相对,尾追情况下其运动方向与雷达相向。第1s开始,目标拖曳着诱饵在方位维进行机动形成三角态势,机动加速度为6g,俯仰维不作机动。当目标与诱饵之间相对于雷达的角度间隔大于雷达半功率波束宽度时,即认为目标已逃离波束,运动终止。根据上述参数设置,迎头和尾追场景下的雷达、目标和诱饵三维运动轨迹如图6所示。
设雷达的方位维初始前置角w在±20°之间变化,则可得迎头和尾追动态场景下干扰信号的时域特征以及目标与干扰的距离差异变化情况如图7所示。
图7表明,干扰过程中雷达与诱饵之间的距离逐渐减小。无论迎头或尾追场景,在干扰释放初期,目标与诱饵之间的差异最大,此时目标和干扰的时域特征差别最为明显,是在时域上进行目标与干扰分辨的最佳时机。随着干扰的进行,迎头条件下的距离差异逐渐减小,而尾追条件下的距离差异则是先减小而后逐渐增大。整体来看,迎头动态场景下的距离差异大于尾追情况,即迎头场景下利用干扰的时域特征进行目诱分辨将更加有利。
迎头和尾追场景下干扰多普勒特征以及目标与干扰的多普勒频差变化如图8所示。
图8的频域特征曲线表明,随着干扰的进行,诱饵的多普勒频率呈现时变特性。无论迎头场景还是尾追场景,在诱饵释放初期,由于干扰三角态势尚未完全形成,雷达接收的目标和诱饵多普勒频率基本相同,二者差异较小[10]。随着机动的进行以及雷达-目标距离、雷达-诱饵距离的接近,三角态势逐渐形成,目标与诱饵之间的角度间隔不断增大,二者的多普勒差异也逐渐变大。目标和干扰之间的多普勒差异越大,越有利于在频域上实现目标和诱饵的分辨。总体来看,迎头动态场景下,由于雷达与目标属于相对运动,雷达与目标、雷达与诱饵之间的相对速度大,因此对应的目诱多普勒频差比尾追条件下更大一些。
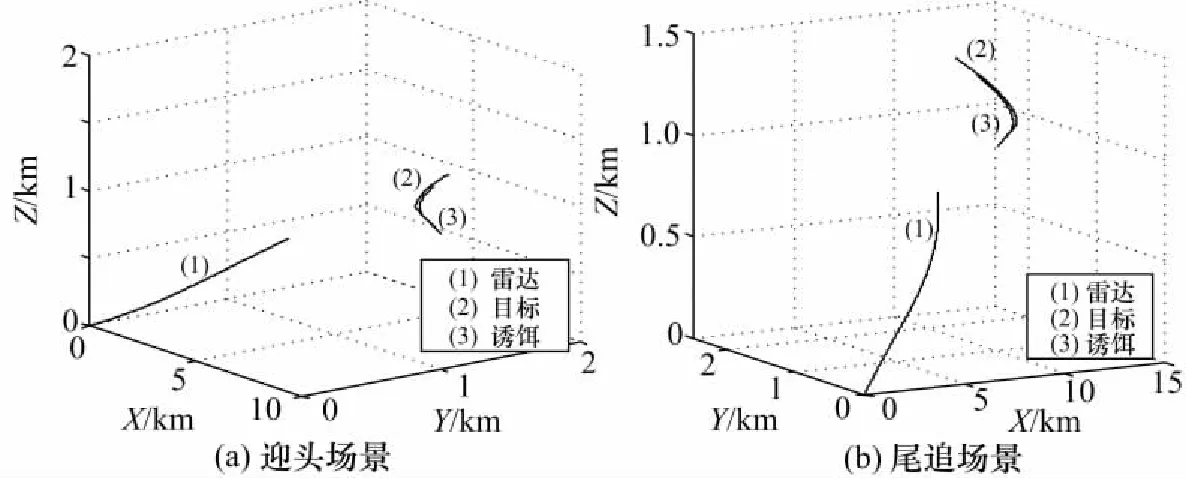
图6 迎头以及尾追场景三维轨迹

图7 迎头和尾追动态场景下干扰信号的时域特征
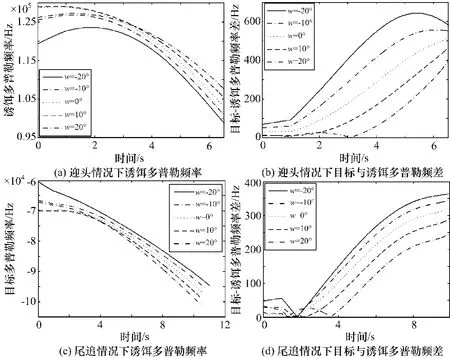
图8 迎头和尾追动态场景下干扰信号的频域特征
5 结束语
有源诱饵通过目标的拖曳飞行形成雷达波束内的两点源干扰,诱骗雷达照射,造成制导错误。本文从典型拖曳式诱饵干扰流程出发,通过分析非相干两点源干扰原理,阐明了拖曳式诱饵干扰的基本特性,通过分析干扰的基本样式以及对应干信比条件,揭示了干扰的本质。在干扰机理分析的基础上,从静止几何关系及动态过程两方面分析了干扰的时频特性,获取了目标与干扰之间特征差异的变化曲线,为从时频特征角度实现目标与诱饵的正确分辨提供了基本条件。
参考文献:
[1]Kerins WJ.Analysis of towed decoy[J].IEEE Trans.on Aerospace and Electronic Systems,1993,29 (4) : 1222 -1227.
[2]宋志勇,肖怀铁.基于角闪烁效应的拖曳式诱饵存在性检测[J].信号处理,2011,27(4) : 522-528.
[3]姬晓琳.拖曳式诱饵干扰机理研究[D].西安:西安电子科技大学,2010.
[4]白渭雄,唐宏,陶建峰.拖曳式诱饵对单脉冲雷达的干扰分析[J].电子信息对抗技术,2007,22(6) : 39-42.
[5]晏行伟.弹载毫米波PD雷达抗拖曳式有源诱饵技术研究[D].长沙:国防科学技术大学,2009.
[6]廖云,何松华,张军.脉冲多普勒雷达抗拖曳式干扰方法研究[J].雷达科学与技术,2009,7(5) : 325-328.
[7]张凯.有源雷达诱饵分析与设计[D].西安:西北工业大学,2006.
[8]阎永举,李道春,向锦武,等.基于Kane方程的拖曳式诱饵释放过程动态特性分析[J].航空学报,2014,35(7) : 1912-1921.
[9]林鹏,刘亚枫,马东立,等.航空拖曳式诱饵的释放过程研究[J].飞机设计,2015,35(1) : 1-5.
[10]白渭雄,焦光龙,付卫红.拖曳式诱饵对抗技术研究[J].系统工程与电子技术,2009,31(3) : 579-582.
Jamming principle and time-frequency characteristic of towed radar active decoy
Song Zhiyong,Su Jian,Fu Qiang
(Science and Technology on Automatic Target Recognition Laboratory,National University of Defense Technology,Changsha 410073,Hunan,China)
Abstract:The towed radar active decoy (TRAD) flies with the airplane to form the two point sources within the radar beam.The decoy beguiles the direction of radar beam,and realizes true angle deception.The jamming course,jamming theory and jamming mode with the TRAD are analyzed,and the essence and characteristic of jamming is illustrated.Then under two typical dynamic scenes,the time-frequency characteristic of the TRAD is analyzed from the geometry relationship and dynamic jamming course.The rule of difference between the target and the decoy is obtained,and this supports the basic condition for the anti-jamming of the TRAD.
Key words:towed radar active decoy; jamming principle; jamming mode; time-frequency characteristic
作者简介:宋志勇(1983-),男,讲师,博士,主要研究方向为雷达信号处理与抗干扰技术、多目标检测与跟踪、雷达目标识别。
收稿日期:2015-08-29; 2015-10-23修回。
*基金项目:国家自然科学基金项目(61401475)
中图分类号:TN973.3
文献标识码:A