
基于BP神经网络的滚动轴承智能诊断技术
2016-05-06 05:38刘良峰
安徽师范大学学报(自然科学版) 2016年2期
方 进, 龚 臖,刘良峰,吕 刚
(北京交通大学 电气工程学院,北京 100044)
基于BP神经网络的滚动轴承智能诊断技术
方进,龚臖,刘良峰,吕刚
(北京交通大学 电气工程学院,北京100044)
摘要:人工神经网络的应用与研究是近几年迅速发展起来的一个国际性前沿研究课题.介绍了人工神经网络及BP神经网络算法,并对传统的BP算法进行改进.建立了基于BP神经网络动车组传动系统滚动轴承智能诊断系统方法,进行了状态识别神经网络训练与测试.通过对外环、内环、滚动体故障和正常情况下数据的计算、仿真和对比,分析了四种情况下在不同网络设计中的识别效率.基于BP神经网络测试的实际输出与期望输出值非常接近,该网络具有良好的识别性能.
关键词:滚动轴承;BP神经网络;智能方法;故障诊断
引言
铁路作为国民经济发展的大动脉,是社会发展的重要基础设施.新中国成立以来,我国铁路获得了巨大的发展,为我国社会和经济的发展做出了巨大贡献,在今后相当长的历史期间内,铁路在国民经济发展中仍将起着重要作用.目前,我国正致力于制定科学合理、符合我国国情的高速铁路标准,提高国家的经济发展和技术发展水平、提高国家安全水平[1].轴承故障诊断技术是高速列车安全运行的关键技术之一.轴承作为动车中重要的旋转零件,也是主要故障源之一.因此,动车组滚动轴承的状态监测与故障诊断能有效提高高速铁路的运行管理水平,并具有显著的经济效益.
从故障机理分析的角度来研究轴承故障信号分析与诊断方法在滚动轴承故障诊断中有很好的指导作用,但是这类方法要求使用人员必须掌握较多的专业知识才能做出准确的判断.相比机理分析方法,智能诊断方法则不需要使用人员有很深的专业基础,诊断过程和结果简便直观.智能诊断方法有专家系统、人工神经网络等,本文选择应用较多的人工神经网络作为轴承的智能诊断方法.
1人工神经网络概述
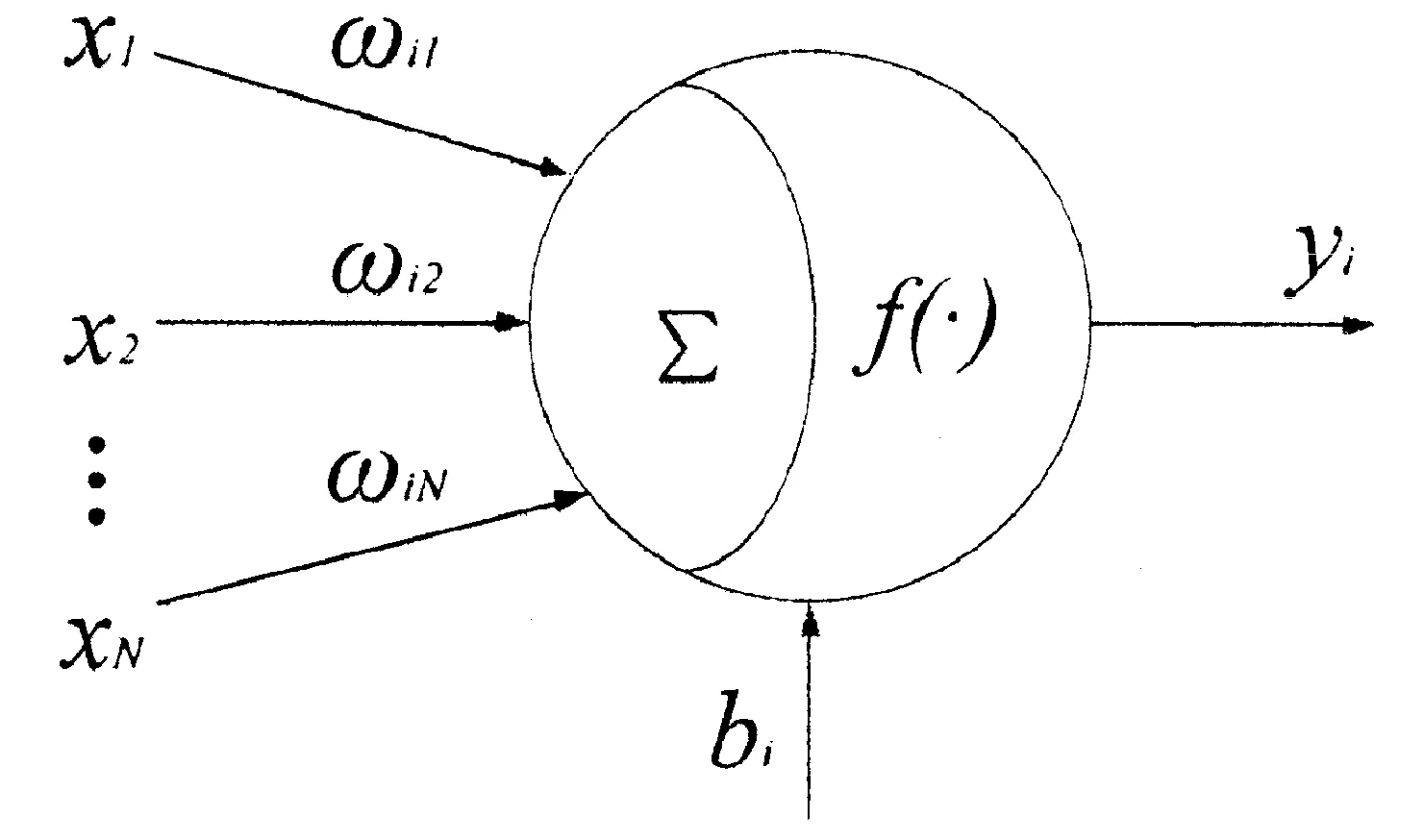
图1 简化的神经元结构Fig.1 A simplified structure of neurons
人工神经网络[2]工程技术模拟人脑神经网络的结构和功能,是一种大规模并行的非线性动力学系统.它从微观结构对人体大脑进行抽象化、简化,是模拟人类智能的一条重要途径.ANN不仅反映了人脑功能的主要基本特征,而且还具有很强的知识获取能力、联想记忆能力、并行计算能力以及良好的容错能力和自适应能力.图1给出了一个简化的神经元结构.
人工神经元的结构主要由3个基本元素组成的,它包括:1)连接权值,如图1中的权值ωij,当该值取正值时表示激活,反之为负值时表示抑制;2)加法器,对输入信号对神经元的相应突触加权之和,如图中的求和函数;3)传递函数,用来限制神经元的输出振幅.三者的关系可描述为
(1)
yi=f(Ii)
(2)
其中,xj(j=1,2,3,……,N)是从神经网络的输入或其他神经元传来的输入信号,bi为神经元单元的偏置(阈值),ωij为第j个神经元到I的连接权,Ii为输入信号线性组合器的输出,f(.)为传递函数,yi为神经元输出信号.
2BP神经网络及其算法
2.1BP神经网络
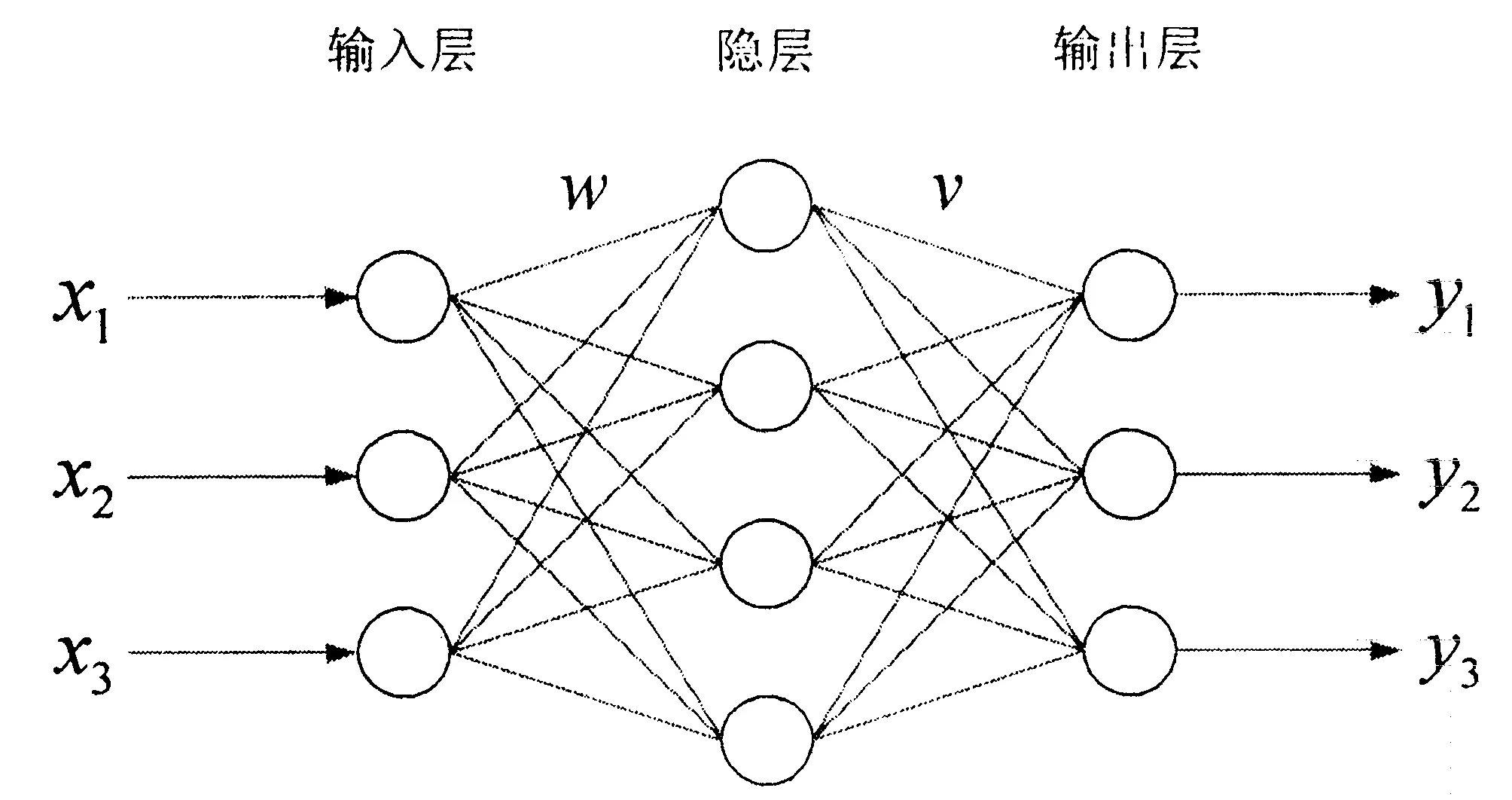
图2 三层BP神经网络结构Fig.2 Three layer BP neural networks structure
大量简单而高度互连的基本神经元组成了神经网络,各神经元之间的连接强度由神经网络内部各节点之间的权值决定.误差反向传播网络(Back-Propagation Neural Network,BP神经网络)是在故障诊断领域应用最广泛、评价最高的一种基于BP学习算法的前向神经网络.人工神经网络在机械设备故障诊断的实际工程应用中,80%以上采用BP学习算法或者其变化形式.
2.2BP算法研究
只有一个隐层的BP网络一般被称为三层BP网络,三层分别是输入层、隐含层和输出层.输入层神经元的个数为输入向量的维数,输出层神经元的个数为输出向量的维数.而对于隐层,在BP神经网络的研究和应用中,并没有标准确定一个网络应该使用几个隐层或者各隐层需要多少个节点,这需要通过反复的实验或使用经验来确定最优BP神经网路的结构.图2为三层BP网络的拓扑结构.
BP算法流程图如图3所示[3-4].
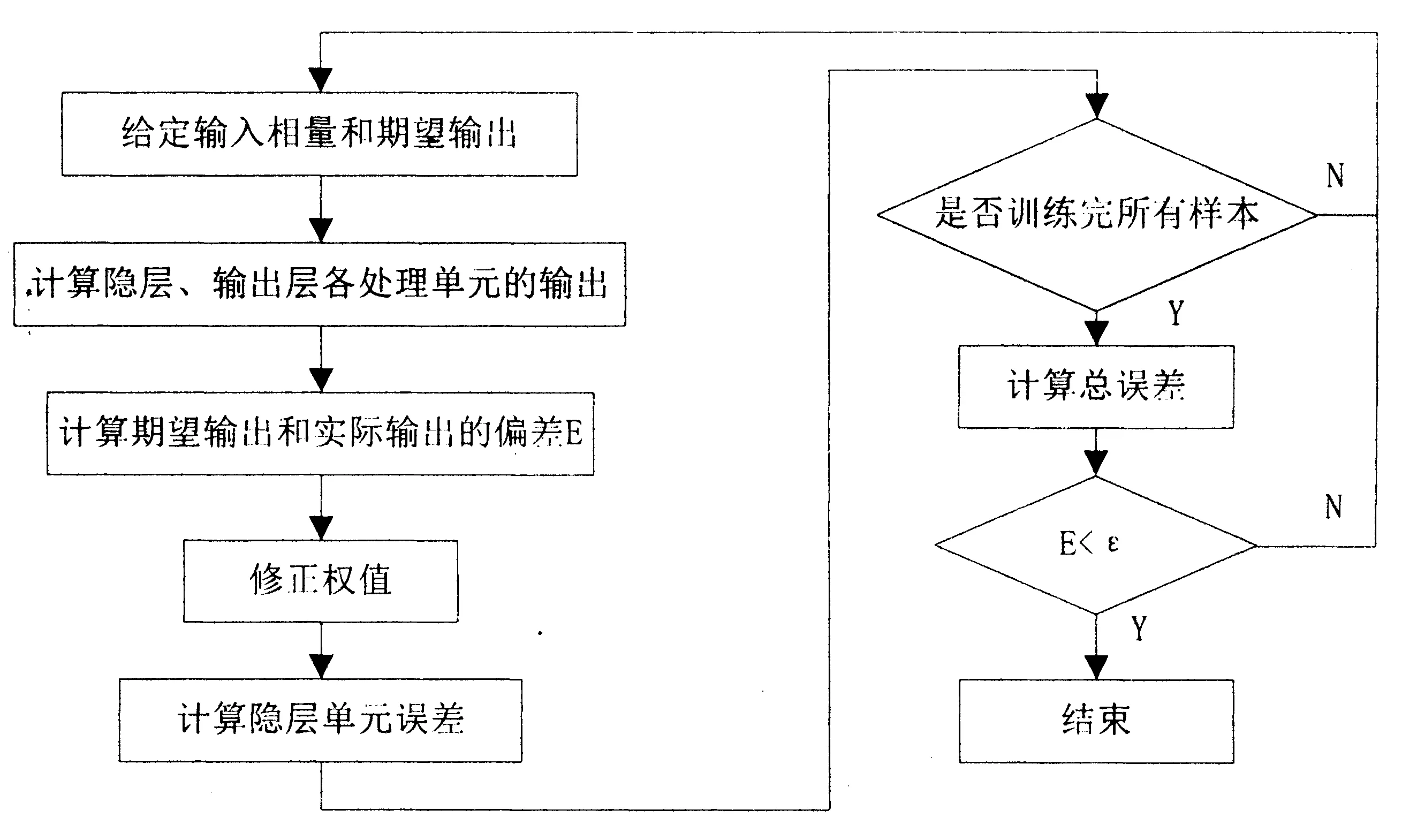
图3 BP算法流程图Fig.3 Flowchart of BP algorithm
2.3BP算法的改进
在实际应用过程中,神经网络的学习训练过程存在训练时间长,收敛慢,甚至不收敛,陷入局部极小等问题.由于本文研究的是实际工程应用中的模式识别问题,出于使用方便和降低成本的考虑,要求神经网络的模式识别能在普通计算机上得以顺利实现.本文重点研究BP算法的改进算法之一,弹性反馈(Resilient Propagation,RPROP)方法.
一般情况下,BP神经网络隐含层的激活函数采用Sigmoid函数.如果输入变量很大,Sigmoid函数的斜率将会变得非常小,以至于接近0,以达到映射目的,这将导致BP网络训练中出现梯度下降的问题.权值修正量的大小不仅依赖于学习速率,还依赖于t时刻误差函数对权值的导数,所以梯度一旦有变化,即使是很小的变化,也会引起权重的变化,使它远离最优值[5].Martin Riedmiller和Heinrich Braun鉴于此在他们的论文中提出弹性BP方法[6].在弹性BP方法中,
(3)
(4)

RPROP的基本原理是对权值修正量的直接修正,它和传统的神经网络以学习速率为基础的算法不同.因此,修正结果不会被不可预见的梯度变化影响.由于RPROP学习规律的清楚和简单,和传统的反传算法比较,在计算上仅有少量的耗费,而且不需要参数的选择以得到最优或者至少接近最优收敛时间.这些优点使得RPROP在BP神经网络的训练学习中得到广泛地应用.
3基于BP神经网络的动车组传动系统滚动轴承智能诊断
BP神经网络结构简单、非线性映射能力强以及工作状态稳定,是最常用的网络结构.基于BP神经网络的动车组传动系统轴承故障诊断系统结构图如下所示:

图4 基于BP神经网络滚动轴承智能诊断系统结构Fig.4 intelligent diagnostic system architecture of rolling bearing based on BP neural networks
图4基于BP神经网络的故障诊断过程分为两步.首先,对系统地采集到一定数量的训练样本数据进行EEMD分解得到8个基本模函数,将各基本模函数的能量作为神经网络的输入特征向量,将输入特征向量归一化处理后对神经网络进行训练,得到期望的诊断网络;其次,将当前诊断振动数据信号输入计算出特征输入向量,输入到训练完成后的神经网络中,并对网络输出进行分析得到诊断结果.
3.1隐层数与隐层节点的确定[7]
单隐层的感知器可以映射所有连续函数,当单隐层的隐节点数很多且仍然不能改善网络性能时,才考虑增加第二个隐层.对于一些实际问题,单隐层增加隐节点仍然不能明显降低训练误差的情况,可以尝试增加一个隐层的多层感知器.
隐节点的作用是从样本中提取并存储其内在规律,每个隐节点有若干个权值,而每个权值都是增强网络映射能力的一个参数.隐节点的数量设置与神经网络的训练样本数量、样本噪声以及样本中蕴含规律的复杂程度有关.对于波动次数多,幅度变化大的非线性函数要求网络具有较多的隐节点来增强其映射能力.目前,常用以下三个公式之一来确定隐含层节点数的初始值,然后逐步增加隐含层节点数到合适为止.
(5)
nh=log2ni
(6)
(7)
其中nh为隐藏层的节点数,ni为输入层的节点数,n0为输输出层节点数.a为1-10之间的常数.
3.2输入层、输出层节点数与样本选择
网络输入为基于基本模函数能量的特征向量,对于优化后的EEMD所输出的8个IMF,其经过能量计算和归一化处理后,是一个8维的向量,即输入层节点数为8个.
输出层节点数为滚动轴承工作状态类别数,一个输出节点对应一种工作状态.本文将根据滚动轴承的4工作状态分成4类.识别检验或实际样本的输出时,考查各节点的输出值最大的那个节点与目标输出中元素1对应,并判定成相应的工作状态类别.在某些情况下,如果输出特征向量中最大的节点数值与其他节点的数值的差较小,不能明显地分辨故障时,可以拒绝识别.
网络训练中滚动轴承状态与基本模函数的能量对应规律都体现在样本中,因此样本必须要有一定的代表性.同时,为了保证各类训练样本的均衡,应尽量使每个类别的样本数量相近或相等,本文对4种滚动轴承状态分别选取30组样本对BP神经网络进行训练.在样本的选取中,除了数量尽量多,对于同一类样本也要照顾到样本的多样性和均匀性,训练样本时,不同类别的样本交叉输入或随机选择输入,增加神经网络的诊断准确度.
4状态识别神经网络的训练与测试
4.1状态识别神经网络的建立
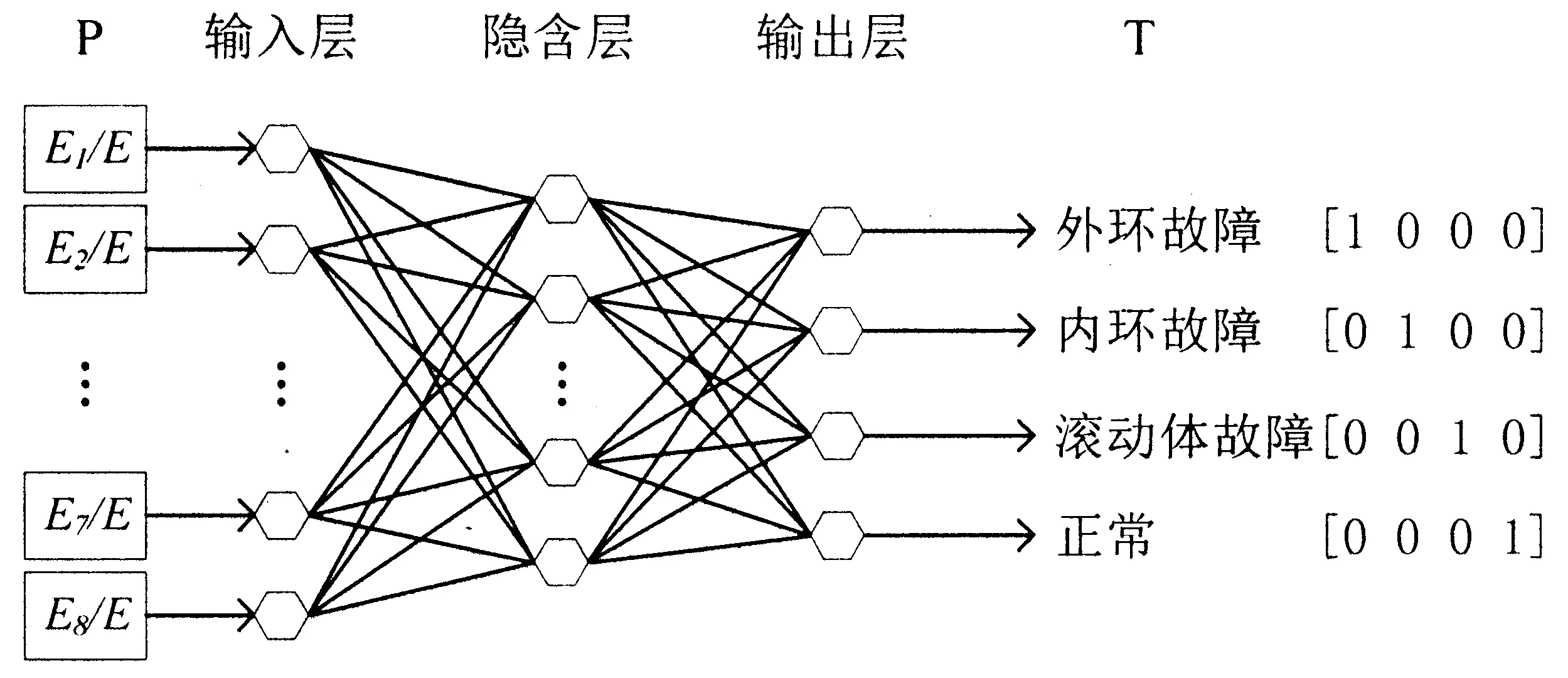
图5 轴承故障智能诊断系统的神经网络结构Fig.5 Neural network structure of rolling bearing intelligent fault diagnosis system
将BP神经网络的最大训练次数设置为10000,进一步限制网络的训练时间.训练精度设置为0.0001,学习速度设置为0.05.BP神经的网络结构设置为三层,如图5所示,其中输入向量P有8个节点,分别为状态信号EEMD分解后得到的前8个IMF的归一化能量分布特征向量,目标输出向量T含有4个节点([1 0 0 0]代表轴承外环故障,[0 1 0 0]代表轴承内环故障,[0 0 1 0]代表轴承滚动体故障,[0 0 0 1]代表轴承正常),隐含层节点个数将在4.2中通过试验确定;隐含层为双曲正切S型激活函数,输出层采用线性激活函数.
4.2状态识别神经网络的训练与测试结论分析
根据4.2中所设计的BP神经网络,进行训练仿真.试验中一共使用训练样本120个,外环故障、内环故障、滚动体故障和正常轴承的训练样本交替出现.测试样本共40个,其中每种状态类别分别为10个.根据公式(6)计算得到初始隐层节点数应设为6,图6为隐层节点数分别为6、7时,神经网络不同的训练过程.可见,在保证训练后网络输出的均方误差(Mean Squared Error,MSE)小于0.0001的前提下,随着隐层节点数的增加,网络训练需要的迭代次数越来越少,论文仅列出隐层节点为6、7时的训练迭代次数与网络输出均方误差的关系图.
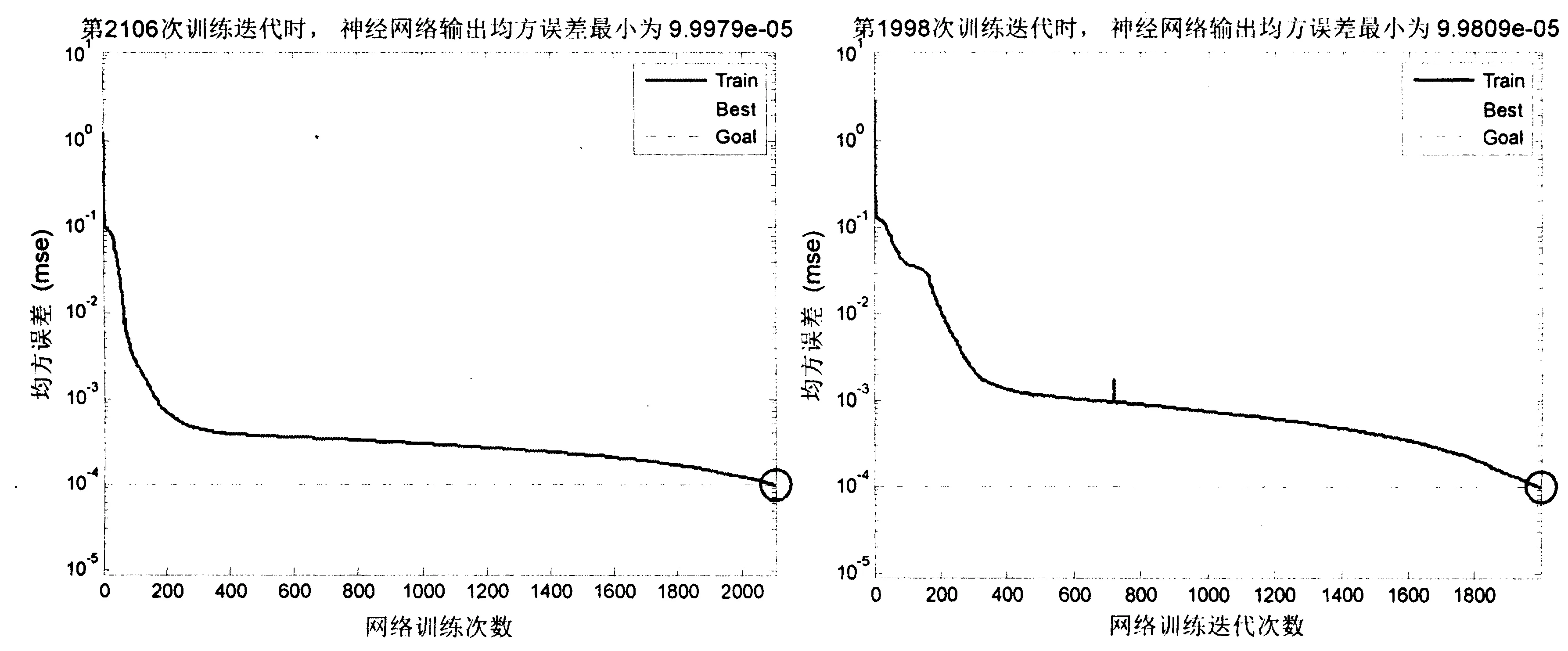
图6 隐藏层节点数为6、7时均方误差和与训练次数的关系Fig.6 Relationship between MSE and training epochs when hidden layer node is 6 and 7
当隐层节点数大于7时,网络训练到其输出均方误差小于0.0001所用训练迭代次数统计如表2所示.每次网络训练完毕后,我们使用训练样本和测试样本对训练好的网络进行仿真测试.表2列出了隐含层不同节点下训练得到的网络对训练数据和样本数据的测试结果,由结果可以明显地发现,当网络结构为8-10-4时,神经网络的训练迭代次数较少,但是测试精确度最高,其训练样本学习正确率为93.33%,仿真样本识别率为87.5%.
通过表2的比较,对于该轴承的故障诊断,应采用8-10-4的网络结构设计,在较少的训练时间内,网络的识别效果最好.对训练好的神经网络进行
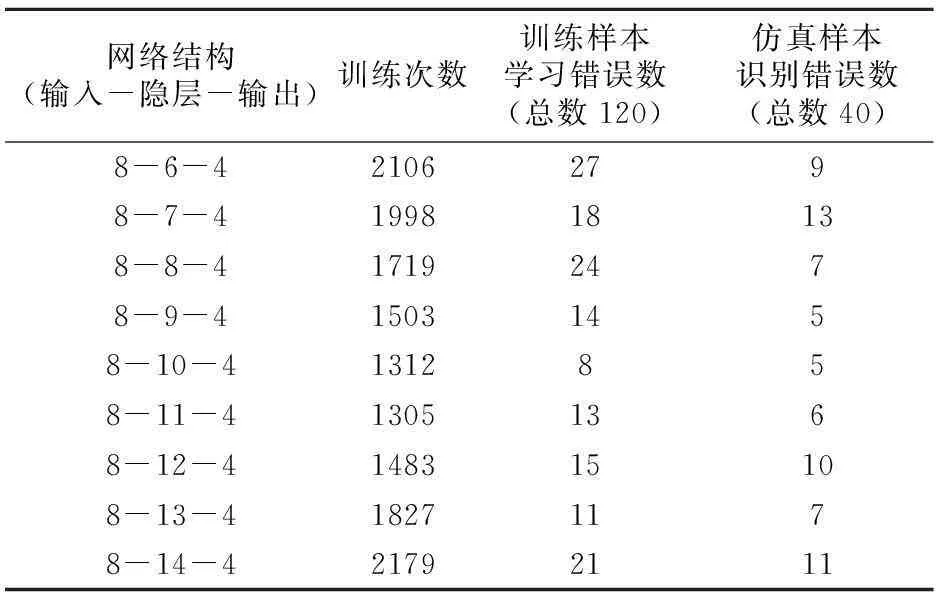
表2 不同结构BP神经网路的训练和测试结果对比
测试,输入一个测试样本,可以得到一个输出向量,将输出向量与网络训练时各状态类别所对应的期望输出作比较,哪一状态类最接近测试样本的输出,则该测试向量就代表哪类轴承运行状态.本例中我们通过比较网络输出的四维向量,使测试样本输出中的最大值和期望输出中的1对应,识别该测试样本的故障类别.
表3-6分别列出了RPROP神经网络结构为8-10-4时部分样本的测试结果,由于测试样本较多,每种故障类别仅列举2个测试结果:

表3 网络结构为8-10-4时外环故障轴承部分测试结果

表4 网络结构为8-10-4时内环故障轴承部分测试结果

表5 网络结构为8-10-4时滚动体故障轴承部分测试结果

表6 网络结构为8-10-4时正常轴承部分测试结果
经过统计分析,这四种不同状态的滚动轴承样本测试结果中,正常轴承的识别结果正确率最高,外环故障轴承次之,再次是内环故障轴承,而滚动体的识别正确率最低.这是由于轴承振动信号是通过固定在电机外壳上的传感器获取得到,相比滚动体故障和内环故障的振动冲击信号在机械传播过程中的衰减而导致振动信号中信噪比较低,外环故障获得的冲击振动能量更大,使其各频率段的能量分布区分度更加明显.因而在EEMD分解后,各频段能量分布较为规律和固定,在神经网络的测试过程中识别成功率也就变高.而正常信号在各频段的分布都比较均衡,能量分布更加固定,故神经网络更容易识别.
总的来说,基于BP神经网络测试的实际输出与期望输出值非常接近,说明该网络具有良好的识别性能.使用该神经网络对轴承的振动信号基于EEMD的能量分布特征向量计算后进行状态识别,可以准确的判断出轴承的工作状态.因此,选择BP神经网络来进行振动信号的动车组传动系统轴承故障诊断是可行的.
5结论
本文通过介绍神经网络的基本单元和结构,引申出在故障诊断领域应用十分广泛的BP神经网络.接着讨论了BP神经网络的特性,并逐步完成神经网络的结构和参数设计.完成BP神经网络的设计以后,使用基于EEMD的基本模函数的能量分布作为神经网络的特征输入,设计好相应的类别输出.对滚动轴承四种工作状态下的特征向量训练网络,使用训练好的网络分别对训练样本和测试样本进行测试.结果表明,采用弹性BP神经网络的轴承状态识别器对滚动轴承故障的智能诊断有较好的效果.
参考文献:
[1]徐安华.我国高速铁路技术标准的几点思考[J].世界标准化与质量管理,2004,(8):43-45.
[2]沈功田,段庆儒,周裕峰.压力容器声发射信号人工神经网络模式识别方法研究[J].无损检测,2001,23(4):144-149.
[3]李家林,董运朝.声发射源特性的神经网络模式识别研究[J].无损检测,2001,23(6):231-233.
[4]刘乐平,林凤涛.基于小波包特征向量与神经网络的滚动轴承故障诊断[J].轴承,2008,12(4):46-48.
[5]袁曾任.人工神经元网络及其应用[M].北京:清华大学出版社,1999:131-273.
[6]MARTIN R, HEINRICH B. A direct adaptive method for faster back-propagation learning: the RPROP algorithm[A]. Proceedings of the IEEE International Conference on Neural Networks (ICNN)[C]. IEEE Press, New York, 1993:586-591.
[7]张德丰.Matlab神经网络应用设计[M].北京:机械工业出版社,2009:57.
Rolling Intelligent Diagnostic Technology Based on BP Neural Network
FANG Jin,GONG Jun,LIU Liang-feng,LV Gang
(School of Electric Engineering, Beijing Jiao-tong University, Beijing 100044, China)
Abstract:Application of artificial neural networks has been at the cutting edge of international research in recent years. Artificial neural network and BP(Back-Propagation) neural network algorithm were described, and traditional BP algorithm has been improved. The paper builds an intelligent diagnostic systems approach of EMU transmission rolling based on BP neural network. State recognition neural network has been trained and tested. It analyses the recognition efficiency from four working states (inner ring fault, outer ring fault, roller fault and normal bearing)by calculation, simulation and comparison.The actual output based on the BP neural network test is very close to the expected output value. Good recognition performance of the network is demonstrated.
Key words:rolling bearing; BP neural network; intelligent methods; fault diagnosis
中图分类号:U269.5+5
文献标志码:A
文章编号:1001-2443(2016)02-0103-06
作者简介:方进(1963-),男,安徽寿县人,安徽师范大学物理系1980级校友.教授,博士生导师.
基金项目:国家工信部重大专项:“典型负载电机匹配以及效率优化技术”(E13B500010).
收稿日期:2016-01-19
DOI:10.14182/J.cnki.1001-2443.2016.02.001
引用格式:方进,龚魾,刘良峰,等.基于BP神经网络的滚动轴承智能诊断技术[J].安徽师范大学学报:自然科学版,2016,39(1):103-108.
猜你喜欢
一重技术(2021年5期)2022-01-18
电子制作(2018年10期)2018-08-04
山东工业技术(2016年23期)2016-12-23
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
科技视界(2016年20期)2016-09-29
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
振动、测试与诊断(2014年5期)2014-03-01
