半潜平台推力器失效模式下的动力定位能力分析
2016-05-04 03:05徐胜文汪学锋
船舶力学 2016年5期
徐胜文,汪学锋,王 磊,
(1.上海交通大学 海洋工程国家重点实验室,上海200240;2.高新船舶与深海开发装备协同创新中心(船海协创中心),上海 200240)
半潜平台推力器失效模式下的动力定位能力分析
徐胜文1,汪学锋2,王 磊1,2
(1.上海交通大学 海洋工程国家重点实验室,上海200240;2.高新船舶与深海开发装备协同创新中心(船海协创中心),上海 200240)
动力定位能力分析对于推力器选型和推力器的配置选型,以及对于一条新设计的动力定位船舶的定位能力的初步检验具有重要意义。动力定位能力分析能够得到船舶在各个艏向角抵抗环境力的能力。文章通过自主开发的程序研究了半潜平台在推力器失效模式下的定位能力,对该程序中的推力分配方法进行了详细的阐述,并对某半潜平台的动力定位能力分析验证了该程序的可行性。研究推力器失效时船舶的动力定位能力,不但可以验证船舶定位时的安全性,而且还可以为推力系统的设计提供适当的建议。
动力定位能力分析;推力分配;推力器失效模式;半潜平台
0 引 言
动力定位船舶被国际海事组织和一些船级社(挪威船级社、美国船级社等)定义为一个专门依靠推力器来自动地保持位置和艏向(或设定的运动轨迹)的船舶。近五十年来,动力定位系统已经被广泛应用在海洋工程领域的作业上,如钻井、铺管、挖泥等。Fay[1]详细介绍了动力定位系统和它的历史。
在设计动力定位船舶时,海上作业安全一直以来是第一考虑因素。为了能够预期海上作业的安全性,了解工作海域的海洋环境条件,以及特定船舶能够抵抗的最大环境力是非常重要的。在一些危险的作业工况下,如钻井,采油,旁靠等,船舶定位的要求很高,不管作业时的海洋环境条件如何。因此,为了安全地计划和执行海上作业,了解船舶的定位能力是非常关键的[2]。所以,在设计新的动力定位船舶时,进行动力定位能力分析是很必要的。
本文通过自主开发的程序研究了半潜平台在推力器失效模式下的定位能力。动力定位能力结果的准确性一般决定于精确的环境力估计和有效的推力分配逻辑。环境力的估计可以基于经验公式,水动力计算或模型试验[3]。推力分配逻辑则采用具有高鲁棒性的二次规划方法[4]。通过对某半潜平台的动力定位能力分析验证了该程序的可行性。
推力器失效模式下的动力定位能力分析一直被船级社认为是不可或缺的[5]。研究推力器失效时船舶的动力定位能力,不仅可以验证船舶定位时的安全性,而且还可以为推力系统的设计提供适当的建议。
1 坐标系
本文采用的坐标系固定在船体上,原点位于水线面上船体作振荡运动时的中心处。船体的坐标系统如图1所示。X轴指向船头,Y轴指向左舷,Z轴向上。环境力的角度α,从船尾起逆时针为正。环境力矩逆时针为正。
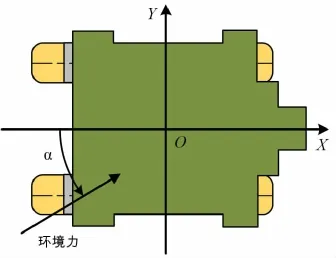
图1 坐标系和符号说明Fig.1 Coordinate and notations
2 动力定位能力分析
动力定位能力分析能够得到船舶在给定艏向下所能抵抗的最大环境力。动力定位能力结果的准确性一般决定于精确的环境力估计和有效的推力分配逻辑。本章介绍了环境力估计的方法,并详细介绍了基于二次规划的推力分配方法。
2.1 动力定位能力分析流程图
动力定位能力分析能够得到船舶在给定艏向下所能抵抗最大环境力的能力。环境力包括风力、流力和波浪力。在计算中,流力保持不变,风力和波浪力以一定的关系变化。因此,环境力一般以风速表示。
如图2所示,动力定位能力分析流程图详细说明了进行这一分析的步骤。给定当前艏向,在初始风速条件下估算船舶所需抵抗的环境力和力矩,然后用推力分配逻辑验证是否(存在解)能够抵抗该环境力和力矩。如果存在解,则继续增大风速,重复以上步骤,直到推力分配逻辑不存在解。这时,存储上一个能够抵抗的风速值,该值即为当前艏向下船舶的定位能力。检查该艏向是否为最后一个艏向,如果不是,重复以上步骤,直到得到所有艏向角下的动力定位能力。最后,画出反映船舶动力定位能力的玫瑰图。
2.2 环境力的估计
船舶所抵抗的环境力一般由风力、流力和波浪力组成。每个组成部分包括六自由度的力或力矩:纵荡力、横荡力、垂荡力、横摇力矩、纵摇力矩和艏摇力矩。在进行动力定位能力分析时,只考虑水平面自由度的力和力矩,即纵荡力、横荡力和艏摇力矩。并且认为风力、流力和波浪力的方向一致[6]。CFD方法可以用来估算风力[7-8]。二阶平均波浪漂移力可以通过势流软件计算得到[9-10]。关于流力的估计可以参考文献[11-13]。本文中,环境力的估算采用的是模型试验方法。
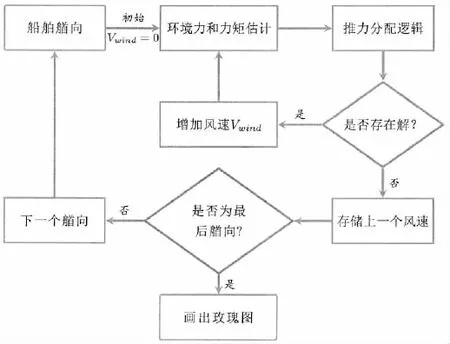
图2 动力定位能力分析流程图Fig.2 Flow chart of dynamic capability analysis
2.3 推力分配逻辑
推力分配问题可以归纳为最优化问题,目标是减小总的能量消耗,约束条件是推力器的推力限制[14-15]。推力分配问题的一个典型特征是推力器的自由度数量多于产生的推力和力矩的自由度数量,即推力系统是过驱动系统[16]。通过最优化方法,可以在多个目标解中寻找最优解。一般地,在动力定位能力分析中找到一个可行解就足够了。但是,为了得到船舶所能抵抗的最大环境力,一个有效的最优化计算是非常必要的,因为要找到推力系统在最优的推力分配下仍无法抵抗的环境力。
文献中有很多关于最优化的方法,二次规划方法被证明是相对有效和鲁棒的[4]。因此,本文中亦采用二次规划方法来求解推力分配问题。
2.3.1 三自由度推力
如果一个船舶装备有m个推力器,推力系统产生的推力向量τ∈R可以归纳为

式中:τX是纵荡力,τY是横荡力,τN是艏摇力矩。向量u∈R2m包含每个推力器在船头和左艏方向产生的推力大小。推力器配置矩阵B∈3×2m的(2i-1,2i)列可以表示为

第i个推力器在水平面的位置由 (lxi,lyi)表示。
2.3.2 问题归纳
推力分配问题可以简单地归纳为一个最优化问题,
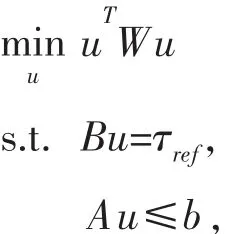
可以用二次规划的方法进行求解。目标函数表示总的推力消耗,W考虑了单个推力器的能量消耗系数。等式约束Bu=τref表示各推力器产生的推力应等于所需推力。不等式约束Au≤b表示各推力器的推力范围。
2.3.3 推力域
为了将非线性约束转化为线性约束,需要对可行域进行近似处理。推力域将由有限个超平面的相交线组成,形成一个凸可行域。对于全回转推力器,如果不考虑禁止角推力域是一个以Tmax(最大推力)为半径的圆,可以表示为:

很明显这个推力域需要近似为凸的多边形。如果把禁止角考虑进去,全回转推进器的推力域近似可以分成三类,如图3所示。
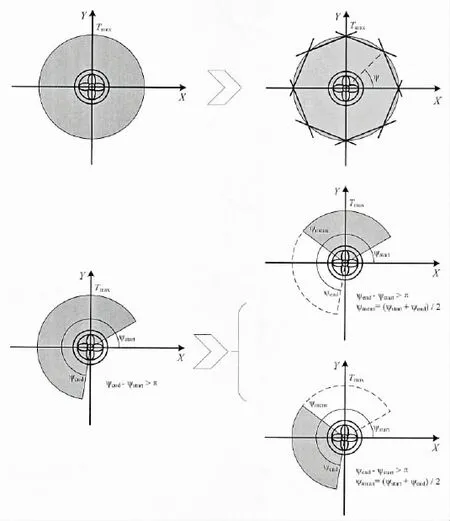
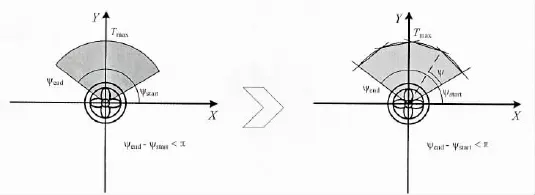
图3 全回转推力器推力域的近似Fig.3 Approximation of the thrust region of azimuth thruster
(1)如果全回转推力器可以从0旋转到2π,半径为Tmax=R>0的圆形区域可以近似为一个正N边形(N≥3)。这个正N边形由多个角度为Δψ=2π/N的三角形组成。近似的推力域可以由如下的不等式约束表示:

式中:k=0,…,N-1。
(2)如果全回转推力器的可行域是一个非凸扇形,即ψend-ψstart>π,这个推力域将被平均划分成两个分离的推力域,如图3所示。对于这两个独立的推力域的近似将转到下一类。
(3)如果全回转推力器的可行域是一个凸的扇形,即ψend-ψstart≤π,这个推力域的圆弧需要由多个超平面的相交线代替,与原来扇形的半径组成一个凸多边形,如图3所示。该推力域将由如下不等式约束表示:
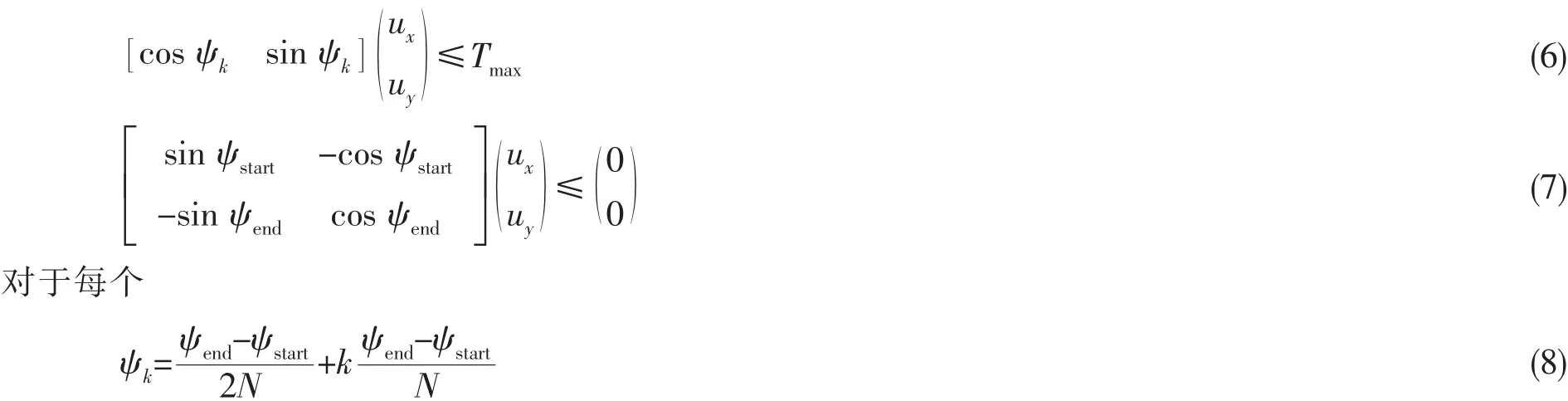
式中:k=0,1,…,N-1。ψstart和ψend应该遵循逆时针顺序。
以上推力域的近似需注意N应该足够大,这样近似的结果才会更准确。文献[4]定义了一个近似误差。如果要使误差小于1%,圆弧的最大区间应该小于15°。鉴于二次规划方法的高效率,在计算中推荐取更大的N值。
2.3.4 非凸推力域的处理
当出现非凸的扇形推力域时,推力域将被划分成分离的凸推力域。用组合的方法来处理这种非凸的推力域问题。如果两个推力器分别具有两个分离的凸推力域A/B和C/D。二次规划方法将分别搜索以下可行域AC,BC,AD,BD寻找最优解。
通过以上环境力的估计及推力分配逻辑,根据动力定位能力分析的流程图,自主编写了动力定位能力分析的程序。
3 算例和结果
选用一条装备8台全回转推力器的半潜平台作为研究对象。半潜平台的参数如表1所示。全回转推力器具有相同的参数,可提供480 kN的推力。推力器的布置如图4所示。各推力器的位置及禁止角的设置如表3所示。为了避免桨桨干扰,相邻的推力器需要设置禁止角避免对后桨产生较大的推力干扰[17]。风力、流力的估计采用模型试验的结果。二阶平均波浪力的估计采用的是势流软件计算的结果。本算例中根据IMCA M140的推荐将流速设定为0.512 m/s。

表1 半潜平台的参数Tab.1 Parameters of the semi-submersible
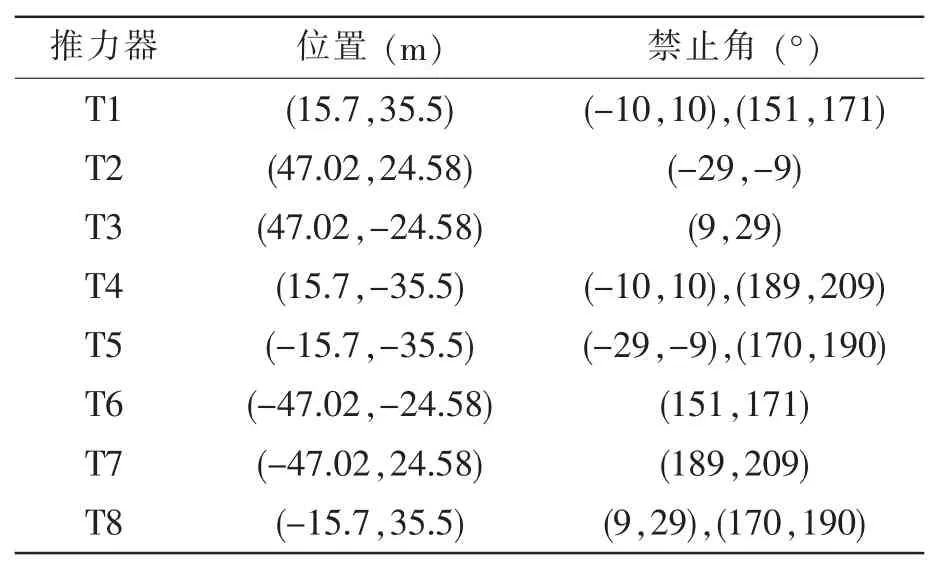
表2 推力器的位置及禁止角Tab.2 Positions and forbidden angles of thrusters
本文计算的推力器失效工况如表3所示。由于推力器是关于原点中心对称的,因此在考虑失效模式时仅考虑了推力器T1和T2。考虑T1和T5及T3和T7失效是考虑到这两对推力器分别由同一个配电板供电。
各工况下该平台动力定位能力分析的结果如图5、6所示。各工况下平台的最大定位能力出现在艏向180°上。由于平台的对称性,平台的动力定位能力曲线关于X轴对称。由于装备全回转推力器,可以提供各方向的推力,平台的动力定位能力差异不大。
工况1的动力定位能力明显好于工况2-5的定位能力。工况2和工况3的动力定位能力非常接近。通过比较它们的数据,工况2的结果略好于工况3。这是因为推力器T1距平台的中心的距离较推力器T2近,因此所能提供的推力力矩较小。因此推力器T1失效(工况2)较推力器T2失效(工况3)的结果略好。动力定位工况4和工况5的动力定位能力基本一致。通过比较它们的数据,工况4的结果略好于工况5。同样是由于推力器T1和T5所能提供的推力力矩小于推力器T3和T7。因此推力器T1和T5失效(工况4)较推力器T3和T7失效(工况5)的结果略好。
该平台的工作海况条件对应的风速是27 m/s。各工况下的动力定位能力均超过了工作海况的条件。但是,工况4和工况5两推力器失效时的动力定位能力非常接近于平台的工作海况。当发生两桨失效时,建议平台迅速撤离工作海域,尽快对平台进行修复。
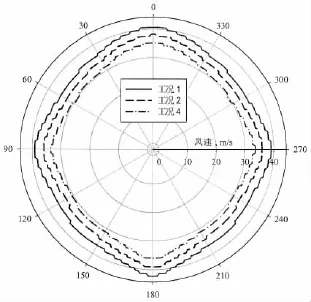
图5 工况1、2和4的动力定位能力曲线Fig.5 Dynamic positioning capability analysis results for cases 1,2 and 4
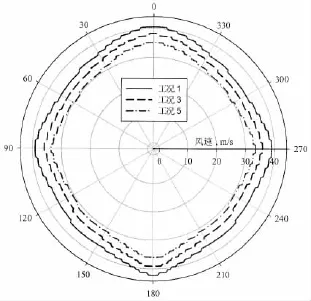
图6 工况1、3和5的动力定位能力曲线Fig.6 Dynamic positioning capability analysis results for cases 1,3 and 5
4 结 语
本文通过自主开发的动力定位能力分析程序计算了某半潜平台的动力定位能力。通过对比推力器失效模式下平台的定位能力,可以得到如下结论:
(1)自主开发的程序用于动力定位能力计算是有效的。
(2)平台在180°具有的最大动力定位能力。在实际海上作业时,应尽量使平台在180°方向工作。
(3)距离平台中心较远的推力器失效引起的动力定位能力的减小较为显著。因此,该推力器的安全应引起更多的重视。
(4)当出现两个推力器同时失效的情况时,建议迅速停止作业,尽快对推力器进行修复。
研究推力器失效时船舶的动力定位能力,不但可以验证船舶定位时的安全性,而且还可以为推力系统的设计提供适当的建议。
[1]Fay H.Dynamic positioning systems:principles,design and applications[M].Paris:Technip,1990.
[2]Pivano L,Smogeli Ø N,Vik B.Dyncap-the next level dynamic DP capability analysis[J].Mar.Cybern.AS,2012.
[3]Sørensen A J,Ronass M.Mathematical modeling of dynamically positioned and thruster-assisted anchored marine vessels [K].In:The Ocean Engineering Handbook,Ferial El-Hawary Ed,2001.
[4]DE WIT C.Optimal thrust allocation methods for dynamic positioning of ships[D].Master thesis.Delft University of Technology,2009.
[5]DNVGL.Rules for classification and construction:Dynamic positioning systems[S].I-1-15,2013.
[6]IMCA.Specification for DP capability plots[K].IMCA M140,2000.
[7]Gosman A.Developments in CFD for industrial and environmental applications in wind engineering[J].Journal of Wind Engineering and Industrial Aerodynamics,1999,81:21-39.
[8]Zhang S,Wang L,Yang S Z,Yang H.Numerical evaluation of wind loads on semi-submersible platform by CFD[C].In:ASME 2010 29th International Conference on Ocean,Offshore and Arctic Engineering,2010:169-175.
[9]Newman J N.Marine hydrodynamics[M].Cambridge(MA):MIT press,1977.
[10]Faltinsen O M.Sea loads on ships and offshore structures[M].Cambridge(UK):Cambridge University Press,1990.
[11]Kim J S,Hong C B,Lee D Y,Ahn S M.Prediction of current load using computational fluid dynamics[C].In:ASME 2009 28th International Conference on Ocean,Offshore and Arctic Engineering,American Society of Mechanical Engineers, 2009:359-366.
[12]Vaz G,Waals O J,Ottens H,Fathi F,Le Souef T,Kiu K.Current affairs:Model tests,semi-empirical predictions and CFD computations for current coefficients of semi-submersibles[C].In:ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering,2009:877-887.
[13]Leite A,Aranha J,Umeda C,De Conti M.Current forces in tankers and bifurcation of equilibrium of turret systems:hydrodynamic model and experiments[J].Applied Ocean Research,1998,20:145-156.
[14]Johansen T A,Fossen T I,Berge S P.Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming[J].Control Systems Technology,IEEE Transactions,2004,12(1):211-216.
[15]刘正锋,刘长德,匡晓峰,周德才.模拟退火算法在动力定位能力评估中的应用[J].船舶力学,2013,17(4):375-381. Liu Z,Liu C,Kuang X,Zhou D.Application of simulated annealing algorithm in Dynamic Positioning capability analysis [J].Journal of Ship Mechanics,2013,17(4):375-381.
[16]Fossen T I,Johansen T A.A survey of control allocation methods for ships and underwater vehicles[C].In:Mediterranean Conference on Control and Automation,IEEE,2006:1-6.
[17]Nienhuis U.Analysis of thruster effectivity for dynamic positioning and low speed maneuvering[D].Dissertation of Technical University Delft,1992.
A dynamic positioning capability analysis for a semi-submersible considering thruster failure mode
XU Sheng-wen1,WANG Xue-feng2,WANG Lei1,2
(1 State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200240,China;2 Collaborative Innovation Center for Advanced Ship and Deep-Sea Exploration(CISSE),Shanghai 200240,China)
Dynamic positioning capability(DPCap)analysis is very important to the selection of thrusters and their configuration and the preliminary investigation of positioning ability of a newly designed dynamic positioning vessel.DPCap analysis can obtain the maximum environmental forces that the DP system can counteract for a given heading.In this paper,a program is self-dependently developed to investigate the dynamic positioning capability of a semi-submersible considering thruster failure mode.The thrust allocation logic of the program is specifically illustrated.The feasibility of the program is demonstrated by a DPCap analysis for the semi-submersible.The research on the DPCap analysis considering thruster failure mode could demonstrate the safety of the DPS and provide adequate guidance to the design of the thrust system.
DPCap;thrust allocation;thruster failure mode;semi-submersible
U674.38+1
:Adoi:10.3969/j.issn.1007-7294.2016.05.006
1007-7294(2016)05-0558-08
2015-12-09
国家重点基础研究发展计划项目(2013CB036103)
徐胜文(1986-),男,博士研究生;汪学锋(1971-),男,教授,通讯作者,E-mail:wangxuef@sjtu.edu.cn。
猜你喜欢
军民两用技术与产品(2022年10期)2022-11-30
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
空间控制技术与应用(2021年1期)2021-04-25
故事作文·高年级(2017年10期)2017-10-19
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
小学阅读指南·低年级版(2016年1期)2016-09-10
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
太空探索(2015年6期)2015-07-12