
基于数值模拟的半潜式钻井平台附加质量研究
2016-05-04 18:39喻志勇李骁健
船舶力学 2016年11期
陈 博,喻志勇,李骁健
(兰州理工大学 机电学院,兰州市 730050)
基于数值模拟的半潜式钻井平台附加质量研究
陈 博,喻志勇,李骁健
(兰州理工大学 机电学院,兰州市 730050)
为了较为完整地明确计算钻井平台影响附加质量的因素,以及附加质量之间的关系,文章主要基于数值模拟计算的方法,通过水动力分析软件AQWA求解平台36个附加质量分量,通过与数学模型计算对比分析得到相应的结果。从AQWA分析得到的视图中可知,平台的附加质量分量随波浪频率的变化而变化;在横荡方向的附加质量由小到大依次为型一、型二、型三平台,与平台在xoz平面内的面积投影大小关系对应,而纵荡方向附加质量基本与平台在yoz平面内的面积投影大小关系对应;通过公式计算的附加质量分量与数值模拟的独立附加质量分量数高度一致。得到平台的附加质量大小与波浪的频率有关;平台在坐标平面上的投影面积大小能在一定程度上反应出附加质量的大小;36个附加质量分量中有21个是独立的。
半潜式钻井平台;附加质量;数值模拟;AQWA;附加质量分量
0 引 言
半潜式钻井平台是现今进行海洋油气开采的重要设备,它具有作业水深大,可承受较大的可变载荷,甲板面积大,钻采能力强,移动灵活,钻井深,工作效率高等优点[1-3],正因为它具有这些其它类型钻井设备没有的优势,使其成为现今研究、投入最大的钻井平台之一。在海洋环境中平台很容易受到风、浪、流的载荷而运动,这种运动对正常作业的平台来说是不利的,在平台的设计全生命周期中都需要从减小平台的摇荡运动出发。半潜式钻井平台在海洋环境中受到波浪的作用而产生强迫简谐运动,由于波浪是随机的所以平台的运动是无规律的,波浪包括了入射波、辐射波和绕射波,这些无规律的波浪作用在平台的表面,使平台表面受到动压力的作用,而使平台产生附加质量。半潜式平台的水动力性能分析的基础理论主要是三维势流理,包括了入射波的入射势、辐射波的辐射势和绕射波的绕射势[4]。有关附加质量的描述最早见于1786年杜布阿特[5]的《水力学原理》,他将圆球置于水中做阻力实验,发现流体的密度对圆球所受到阻力的大小有影响,好似球的质量变大了。20世纪30年代刘易斯[6]在依据实验基础上,得到了依靠图谱的附加水质量计算公式,该公式成为了后来研究附加质量的重要指导,有些思量一直沿用至今。Esmailzadeh[7]结合数值解和理论解,研究了薄板在无粘不可压缩流体中的动态特性,转化得到了虚拟化的流体附加质量矩阵。朱仁传等人[8]对船舶振动的附加质量进行数值模拟及分析,分析结果为船舶运动的预报提供了指导意见。He等人[9]采用数学模型的方法,对船舶进行分段的附加质量动态研究,根据流体动力学作控制方程,通过使用格林函数导出了附加质量公式。半潜式钻井平台的附加质量计算公式研究得较多,但是对附加质量六自由度上的36个附加质量关系以及频率与附加质量的关系研究得较少,对这些关系的研究对平台的选型和早期的运动响应预报具有重要意义。
文章首先介绍了求解半潜式钻井平台附加质量的理论基础,即波浪入射势、辐射势、绕射势到求解平台的附加质量;然后采用ANSYS建立三种平台的三维湿表面模型,用AQWA软件进行数值模拟得到六自由度上不同构型平台的附加质量对比图;然后统计、分析了型一平台在六自由度上共36组附加质量数据;最后论证、分析了波浪频率、平台在基本面投影对平台附加质量的影响,以及36组附加质量分量之间的关系。
1 理论基础
海洋中钻井平台受到周围波浪的反作用力,称为附加惯性力,它的方向和平台的加速度方向相反;平台加速运动时,附加惯性力起阻力作用,平台减速时它起动力作用。质量为m平台要获得加速度为a,施加在平台上的波浪力F将要大于ma,可写成则称λ为平台的附加质量。
三维势流理论是分析船舶及钻井平台在波浪载荷作用重要的基础理论,其中为了便于求解计算,势流理论提出了以下五点假设,势流理论的分析、计算都是在这些基础上进行。
基本假设[10]:
(1)海水为理想液体不可压缩;
(3)海水的表面张应力忽略不计;
(4)海水无粘性;
(5)海洋平台的运动和波浪自由表面的运动都是微幅的。
1.1 平台运动分析中采用的坐标系
全球坐标系(空间固定坐标系)o-xyz,这套坐标系的位置不随平台的运动而变化,是平台运动的参考坐标,原点o位于未扰动的水平面,z轴竖直向上。

图1 平台坐标关系Fig.1 Relation of platform coordinate
随机坐标(平台上固定坐标系)o′-x′y′z′,该坐标系随平台的运动而做同步运动。坐标的原点o′位于平台的重心,x′轴平行于平台基线并指向船首,y′轴垂直于x′轴指向平台的左侧,z′轴垂直于平台水线面且通过平台的重心和浮心,如图1所示。
1.2 速速势
Laplace方程:

海底条件:

平台表面条件:

自由液面条件:

由微幅假定可认为速度势为线性,根据叠加原理,将流场中的总速度势拆分为辐射势、绕射势和入射势,可表示为:

式中:ΦI为入射势;ΦR为辐射势为p点坐标为绕射势。
在假定平台做微幅运动的前提下,速度势可分解为空间速度势和时间的乘积,于是有:

流体空间速度势为:

依据Airy波理论有

式中:g为重力加速度;k为波数;A为波幅;h为水深;β为浪向,浪向的定义,在o′-x′y′z′坐标系中波浪传播方向与x′轴之间的夹角且从z′轴正向看逆时针为正;k=2π/λ,λ为波长。
以无穷远为边界条件,定解有:
自由液面条件:

控制方程:

海底条件:

平台面条件:


控制方程:

平台面条件:

液面条件:

辐射条件:

海底条件:

1.3 求解附加质量
流体两时刻速度势差可表示为:
平台六个自由度上的受力分量:

(21)式两边同乘δt有:

取δt→0有:

Fi=fi+fi′(fi表示附加惯性力,fi′表示其它成分)


整理得:

Sb表示平台湿表面面积;ρ为海水密度;A为平台积分最小单元;U为平台的瞬时速度;p为压强;ui,j表示平台运动的广义方向速度;ni,j为平台面的广义方向数(i,j=1,2,3,4,5,6)。
2 平台建模与数值仿真
采用ANSYS建立三种常见构型半潜式钻井平台的三维湿表面模型,数值模拟基于当下流行的水动力分析软件AQWA。表1给出了研究平台的详细参数,为了准确分析平台构型对附加质量产生的影响,三种构型的平台除了构型不一样外,其所有结构采用相同的尺寸及作业环境。图2为所研究类型平台的三维湿模型。
通过ANSYS建立好平台的模型后,通过命令生成数值模拟需要的dat文件,软件会根据平台的排水体积自动换算出平台的质量。在数值模拟中还需要重要的参数平台的转动惯量,转动惯量需要计算得出。平台的转动惯量计算公式为:I=mk2,式中I为平台转动惯量;m为平台质量;k为回转半径。
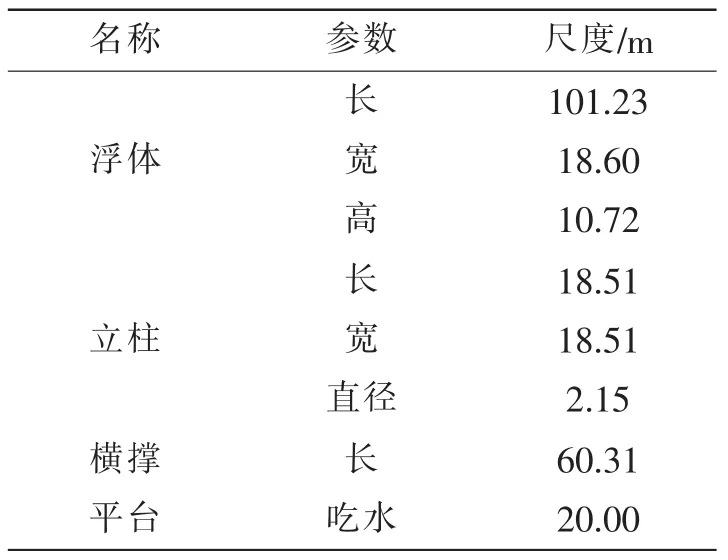
表1 平台结构主尺度Tab.1 Main dimension of platform structure
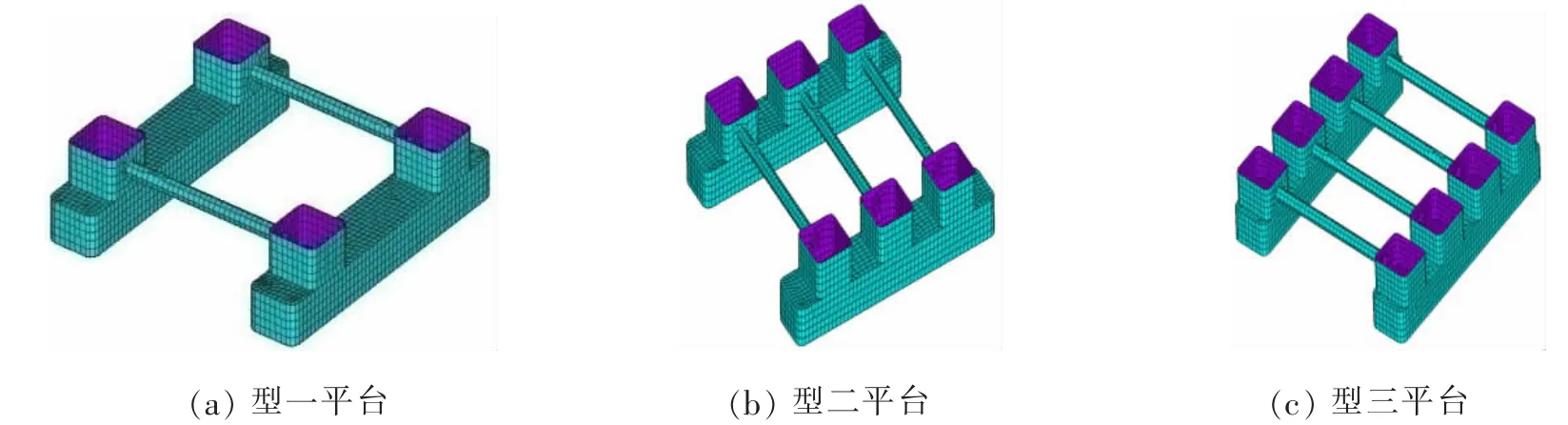
图2 平台三维湿表面模型Fig.2 3D wet surface model of platform
对于文中所研究的规则平台,kxx=0.34×b,kyy=0.25×a,kzz=0.26×a;式中:a为平台的长;b为平台的宽;根据上式可求得平台转动惯量。
将修改好的dat文件导入aqwa中进行数值模拟计算,得到需要的附加质量数据。钻井平台在海洋环境中存在六个自由度分别为纵荡、垂荡、纵摇(偶模态)和横荡、横摇、首摇(奇模态)[11],它们是相互独立和互不影响,平台的每一个自由度上的运动将会产生六个独立的分量,平台共产生36个附加质量分量。为了节省篇幅,省略了其中11个的附加质量分量。附加质量的正负值,与平台所给的边界条件有关,视图中纵坐标的单位不统一但是传达的含义相同,转动状态下以力矩形式体现。所有视图中1、2、3分别代表型一、二、三平台对应的曲线。
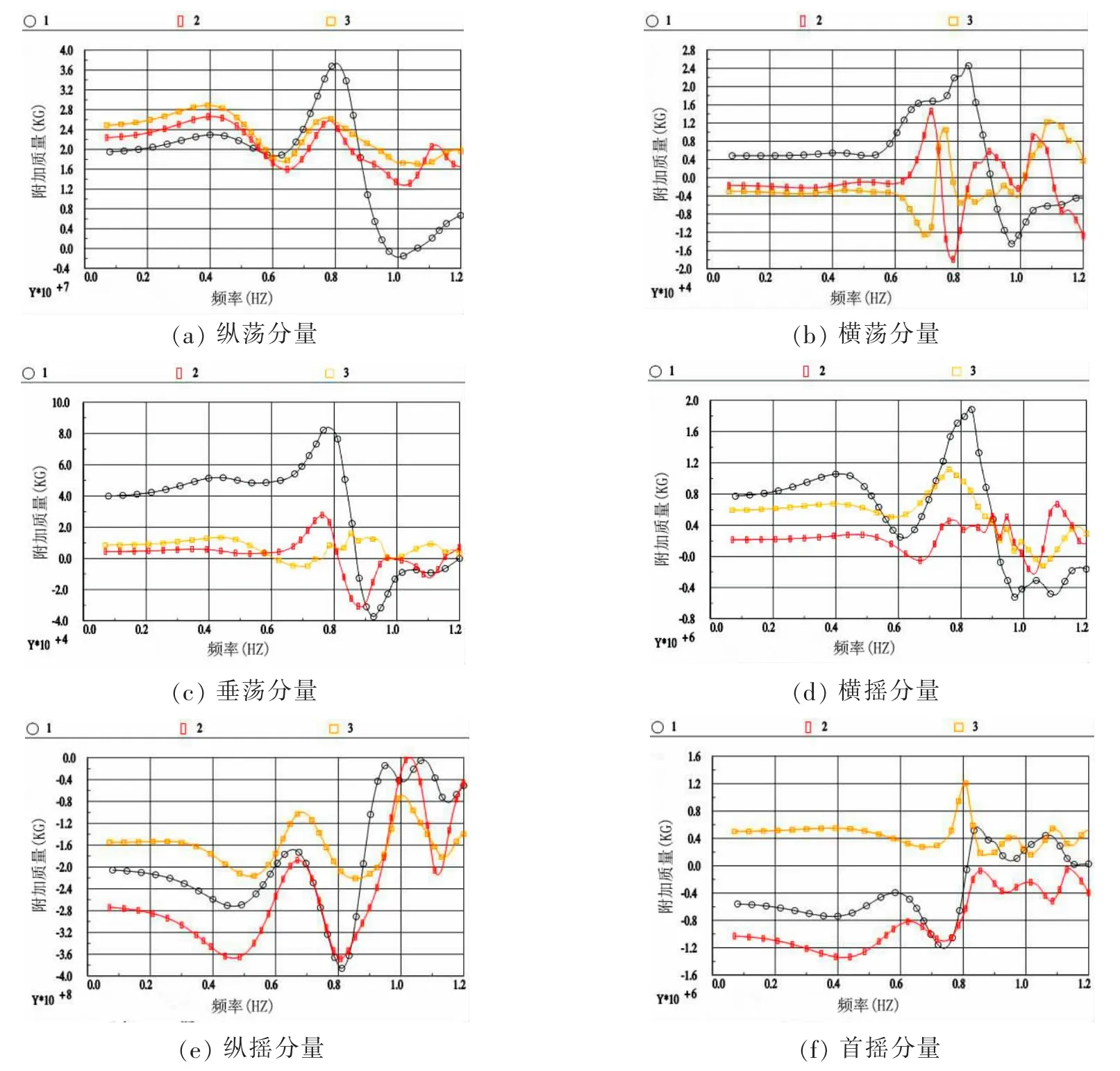
图3 纵荡引起的附加质量Fig.3 Added mass due to pitch
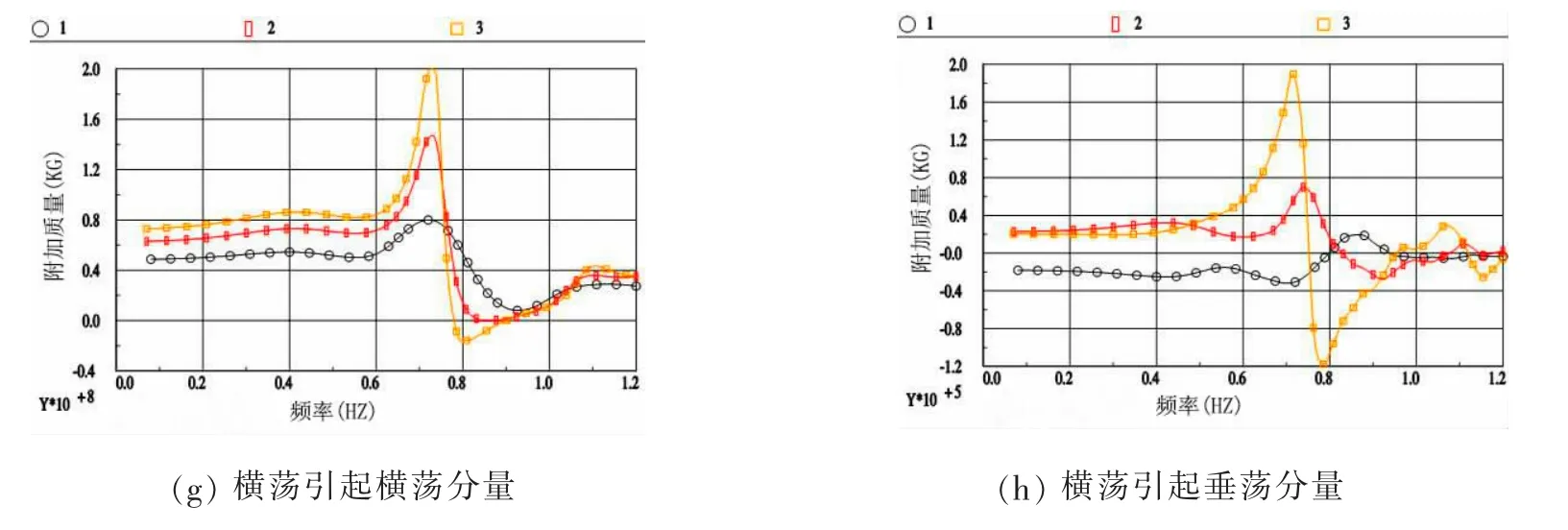
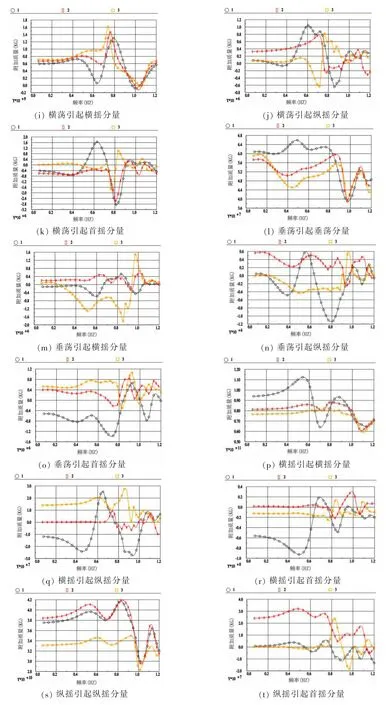
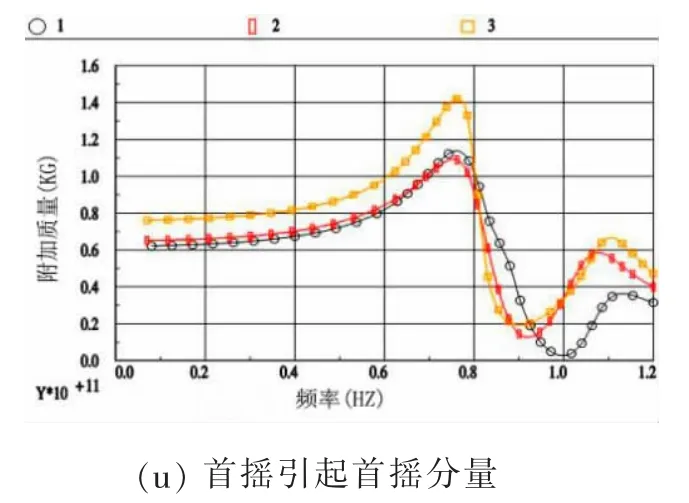
图4 横荡、垂荡、横摇、纵摇和首摇引起的附加质量Fig.4 The added mass caused by the horizontal swing,heave,roll,pitch and roll
由图3-4可知,附加质量的值随着ω值的变化而变化,说明附加质量的值与波浪的频率有关;当0.1<ω<0.5范围时附加质量几乎趋于恒定值,说明此范围波浪频率对附加质量的影响较小;在0.6<ω<1.0范围时附加质量的值变化较为明显,此范围频率对附加质量的影响较大;从型一平台到型三平台,平台的立柱数从4增加到了8,平台在xoz平面内的投影面积小大依次为型一、型二、型三,但是在单幅图中,横荡方向上的附加质量的分量并没有明显呈现上述关系;可以从图中得出附加质量与平台的构型必然存在关系;随着ω的增加,所有图趋于同一的规律,附加质量先是降低而后增加。
3 结果分析
由于数据量太大,限于篇幅,文章仅列出了型一平台在六自由度上的附加质量分量数据。所得数据中附加质量出现了负数仅代表数学含义,并不表示附加质量为负,正负值取决于选取的边界条件,由公式F=(m+ )λ a⇒F-λa=ma解释为平台做减速运动。表2到表7分别统计了型一平台六自由度上附加质量的最小值、最大值和均值,以及对应的项的和,表8统计了所有自由度上的均值和,所有的数据均在AQWA求解后的文件夹中提取。图5为型一、型二、型三平台纵荡、横荡附加质量对比图。
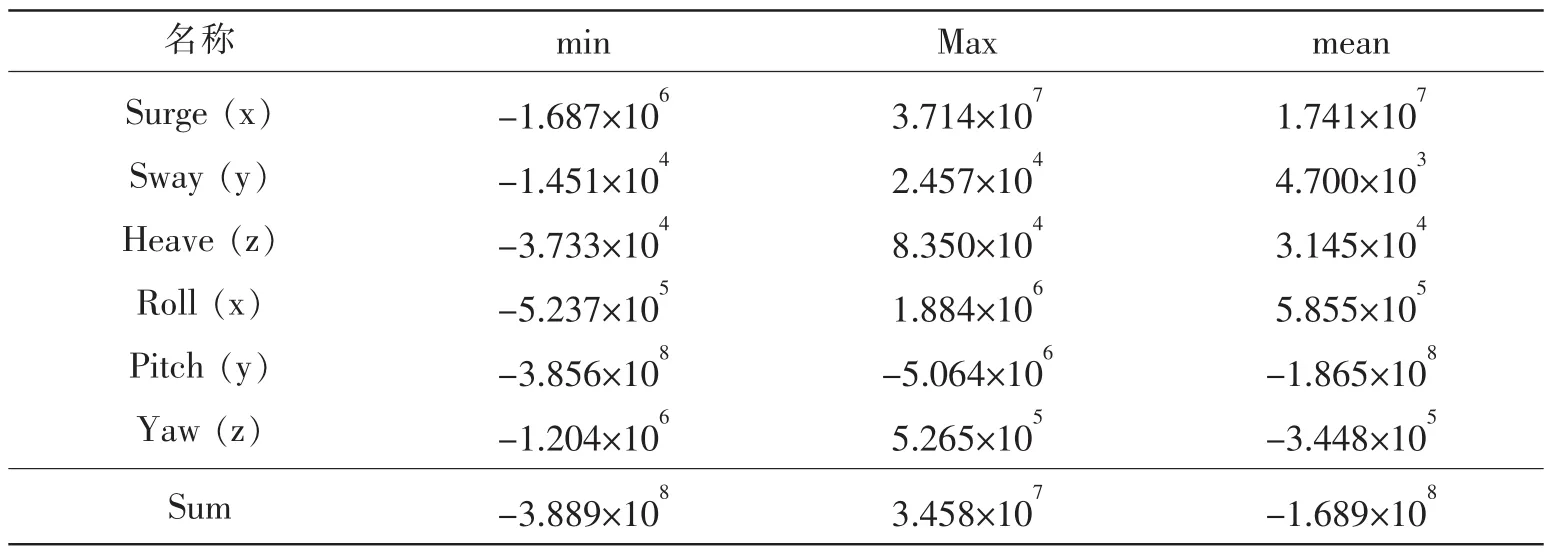
表2 型一平台纵荡引起的附加质量(单位kg)Tab.2 Added mass due to surge of type one platform(unit kg)
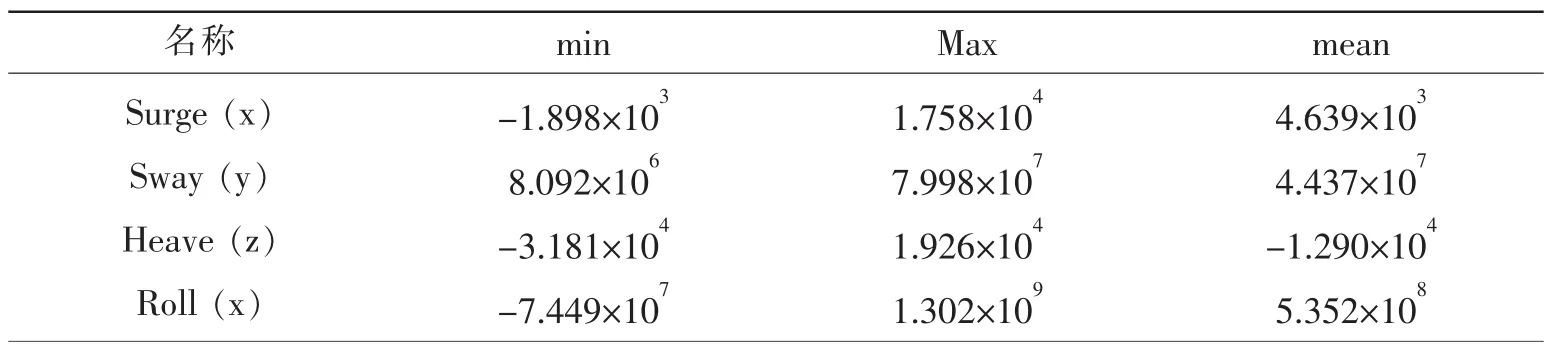
表3 型一平台横荡引起的附加质量(单位kg)Tab.3 Added mass due to sway of type one platform(unit kg)

续表3
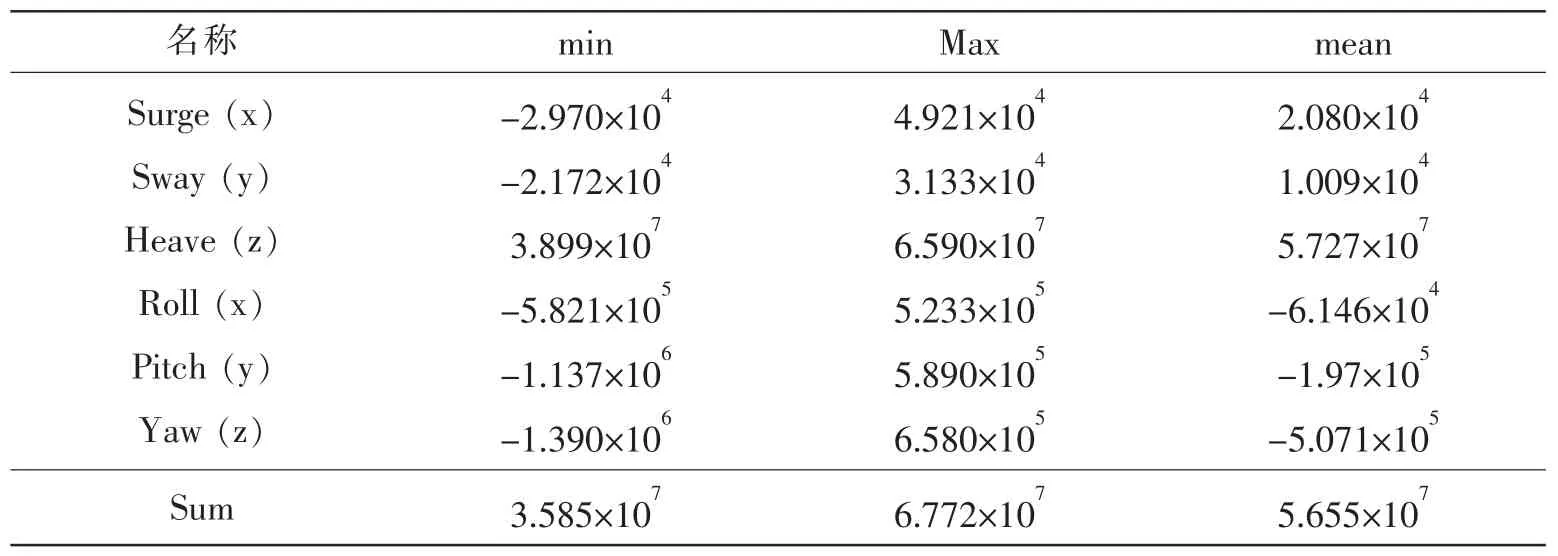
表4 型一平台垂荡引起的附加质量(单位kg)Tab.4 Added mass due to heave of type one platform(unit kg)
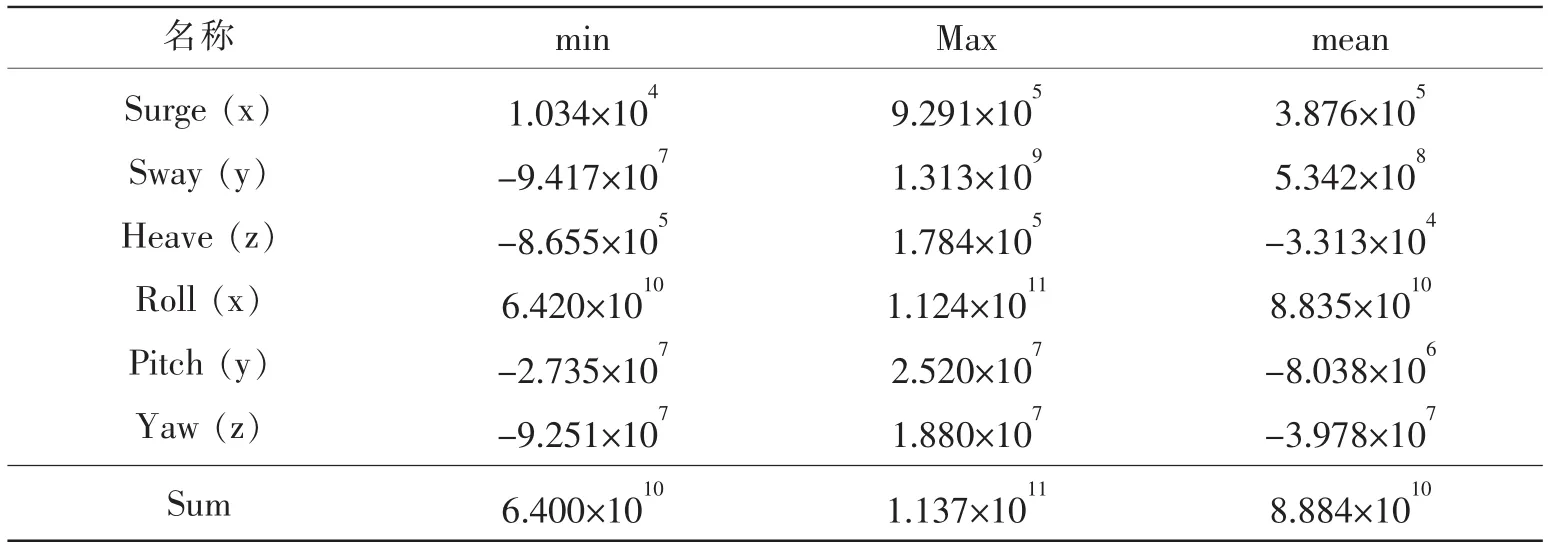
表5 型一平台横摇方向上的附加质量(单位kg)Tab.5 Added mass due to roll of type one platform(unit kg)
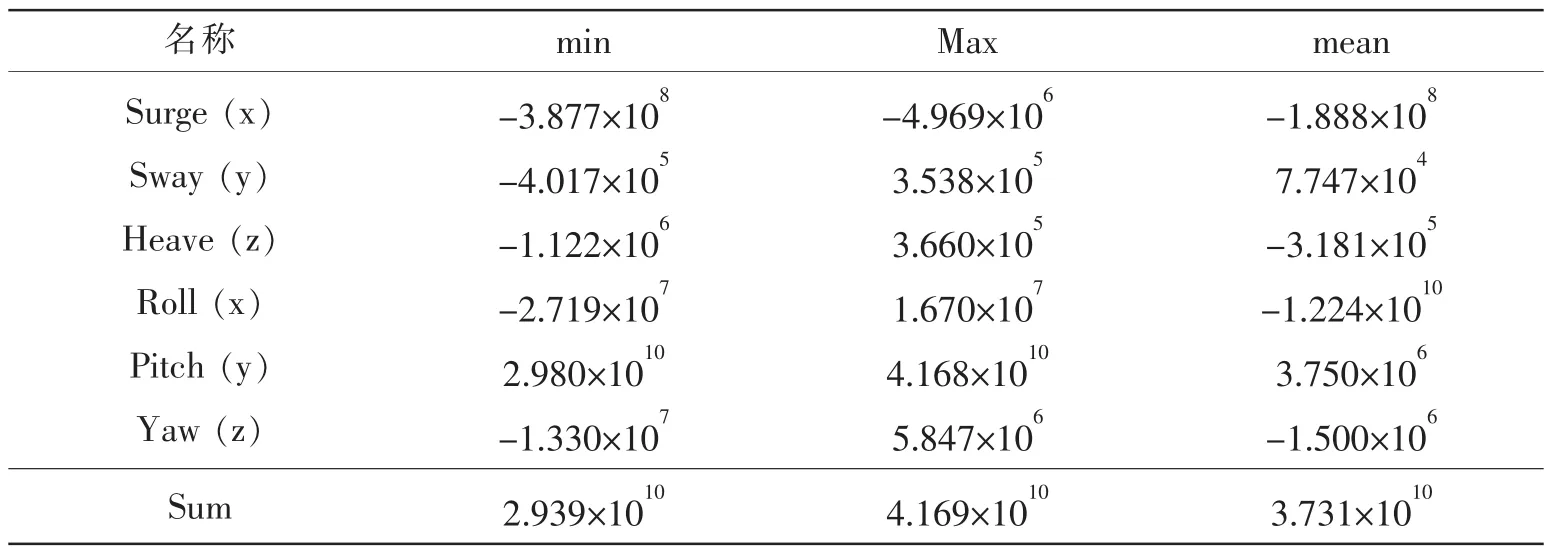
表6 型一平台纵摇引起的附加质量(单位kg)Tab.6 Added mass due to pitch of type one platform(unit kg)

表7 型一平台首摇引起的附加质量(单位kg)Tab.7 Added mass due to yaw of type one platform(unit kg)
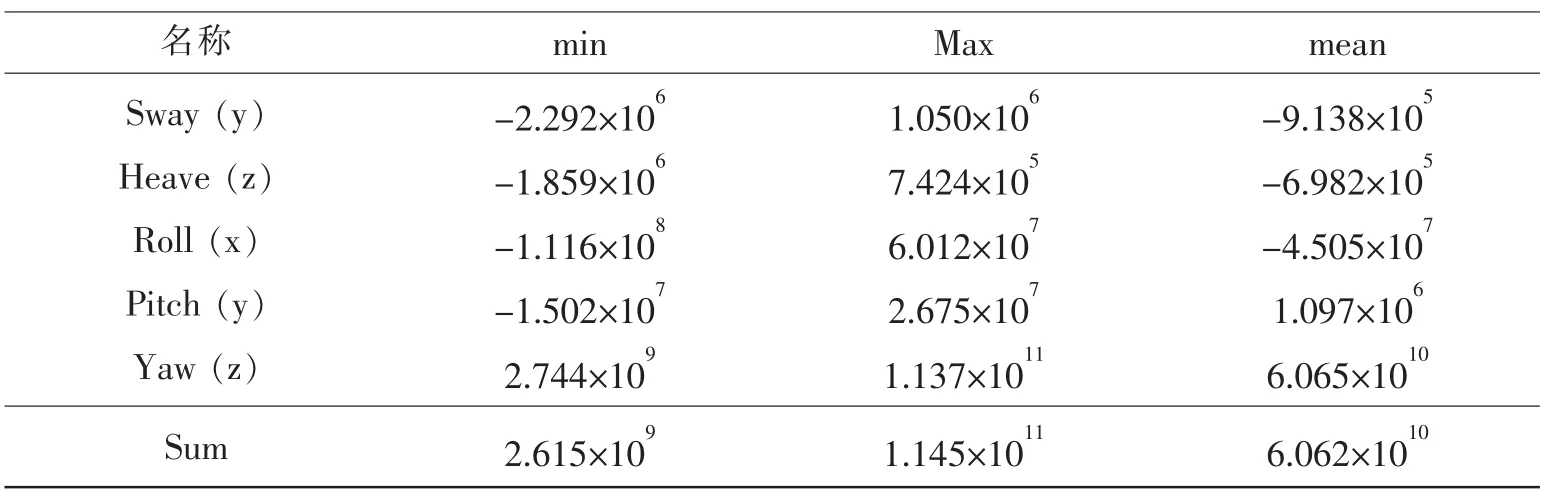
续表7
由表2-7可知,纵荡运动引起的附加质量分量中,纵摇方向的附加质量数值较大,而横荡方向的附加质量较小,说明平台受迎浪或尾浪时,平台左右弦方向受力较小而纵摇方向受力较大;横荡运动引起的附加质量分量中,纵荡方向附加质量较小,而横摇方向的附加质量较大,此时平台受横浪影响较大与事实情况相符;垂荡运动引起的附加质量分量中,垂荡的方向的附加质量较大,而纵荡、横荡和横摇方向的附加质量较小;横摇运动引起的附加质量分量中,横摇方向的附加质量最大,纵荡、垂荡方向的附加质量较小;纵摇运动引起的附加质量分量中,纵摇方向的附加质量最大,横荡方向的附加质量较小;首摇运动引起的附加质量分量中,首摇方向的附加质量最大,横荡方向的附加质量最小;综合平台的附加质量分量上看,与实际情况相符。
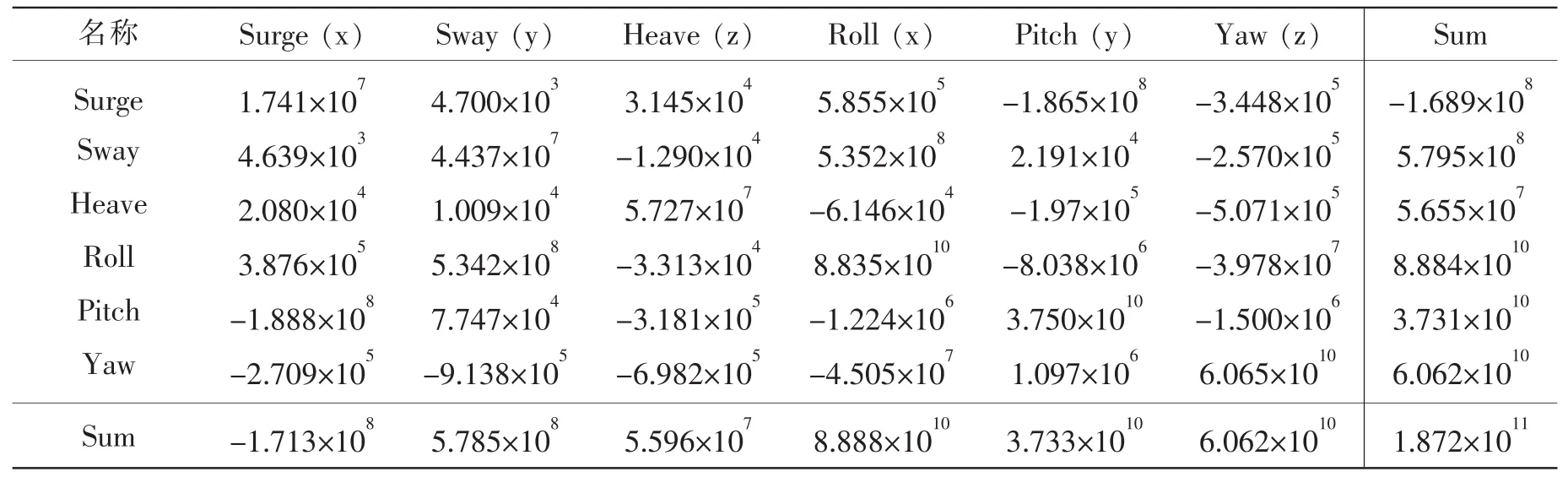
表8 各自由度上摇荡引起的附加质量均值和(单位kg)Tab.8 Mean value of added mass by each degree of freedom(unit kg)
由于数据的量级相差较大,数据中同一量级数据近似相等处理。分析表8可知,表格数据关于主对角线对称,每一组对称的数据近似相等,每一项对应的和同样近似相等。可知纵荡方向上的垂荡分量等于垂荡方向上的纵荡分量,对于其它方向上的分量此结论依然成立,因此可知在36个分量中有21分量是独立的。
依据动能定理,由作用力与反作用力,平台加速运动时给流体的作用力就是λa( λdV/)t,在dt时间段内,平台的运动距离是Vdt,则平台所做的功为理想流体的平台所做的功等于海水获得的动能,即等式两边同时积分得上式只要计算出流体的动能,就能求出平台的附加质量。在一个半径足够大的空间ε内,若平台在此空间以作变速运动速度为Vt,面积记作S,平台加速微元流体dτ获得速度v,则得空间流体的动能dτ,理想流体不可压缩在重力场中由静止到运动,其运动是无旋的,所以存在速度势Φ既得:

又有

利用高斯公式代入有:


进一步化解有:

λij为附加质量的分量(i,j=1,2,3,4,5,6)。
由上式可以得到λij=λij即λij有21个独立分量,21个独立分量它们分别是:
(1)λ11,λ12,λ22,λ23,λ31,λ33它们是由平动引起的,具有质量的量钢;
(2) λ14,λ15,λ16,λ24,λ25,λ26,λ34,λ35,λ36它们是由转动和平动共同产生,具有质量距的量钢;
(3)λ44,λ45,λ55,λ56,λ64,λ66它们由转动产生,具有转动量惯量的量钢。
公式推算与数值模拟结果高度吻合,可知公式分析较为合理,结论正确即平台六自由度上的36个附加质量分量有21个是独立的。
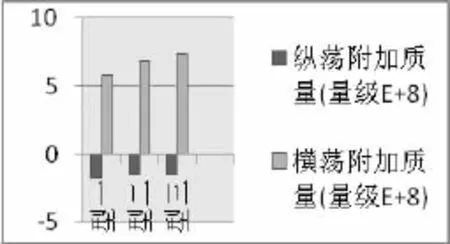
图5 型一、型二、型三平台纵荡、横荡附加质量对比(kg)Fig.5 Added mass contrast of surge and sway of type one,two,three platforms(kg)
4 结 论
(1)半潜式钻井平台的附加质量与海洋中波浪的频率和平台的外形有关,平台在某一坐标平面上的投影面积能在一定程度上反应出平台在该方向平动附加质量的大小关系;
(2)通过理论公式分析,确立了平台在六自由度上36个附加质量分量中,有21个附加质量为独立分量,与数值模拟计算的结果高度一致;
(3)平台六自由度上的附加质量中,平动(纵荡、横荡、垂荡)的附加质量与转动(横摇、纵摇、首摇)的附加质量不是同一个数量级,转动的附加质量要远大于平动的附加质量;
(4)附加质量的增加会降低平台的振动固有频率,在海洋中波浪的周期分布较为不均,但是周期位于1-30秒的波浪具有的能量是海洋波浪总能量的一半以上,其对应的能量峰值周期约为10秒,在平台的选型、设计中要考虑尽量避开;
(5)在船舶的理论中有,横向附加质量约为船舶质量的0.75-1.00倍;纵向附加质量约为船舶质量的0.07-0.10倍,在半潜式钻井平台中此结论并不成立。
参 考 文 献:
[1]Arvani F,Rideout D G,Butt S D.Dynamic model of a mobile offshore drilling unit in deep water environments for drilling simulation[C]//ASME 2015 34th International Conference on Ocean,Offshore and Arctic Engineering.American Society of Mechanical Engineers,2015.
[2]Zeng Y,Wanvik L G,Wang T,et al.Dry-tree semi-submersible production and drilling unit:U.S.Patent 8,807,874[P]. 2014-8-19.
[3]Wang S,Cao Y,Fu Q,et al.Hydrodynamic performance of a novel semi-submersible platform with nonsymmetrical pontoons[J].Ocean Engineering,2015,110:106-115.
[4]Zurkinden A S,Ferri F,Beatty S,et al.Non-linear numerical modeling and experimental testing of a point absorber wave energy converter[J].Ocean Engineering,2014,78:11-21.
[5]Dubuat.Principles d’hydraulique[M].Imprimerie de Monsieur,1786.
[6]翁长俭,张保玉.船体振动学[M].北京:人民交通出版社,1985:1-100. Weng Changjian,Zhang Baoyu.Hull Vibration[M].Beijing:Peopl’s Communication Publishing Company,1984:1-100.
[7]Zhu R C,Guo H Q,Miao G P,et al.A computational method for evaluation of added mass and damping of ship based on CFD theory[J].Journal of Shanghai Jiaotong University,2009,43(2):198-203.
[8]Eamailzadeh M,Lakis A A,Thomas M,Marcouiller L.Three dimensional modeling of curved structures containing and/or submerged in fluid[J].Finite Elements in Analysis and Design,2008,44:334-345.
[9]He X J,Huang Y,Lan M,et al.A basic computation model of added mass on ship section with Green function[J].Applied Mechanics and Materials,2014,556:3678-3681.
[10]夏国泽等.船舶流体力学[M].武汉:华中科技大学出版社,2008:110-120. Xia Guoze,et al.Ship Hydrodynam[M].Wuhan:Huazhong University of Science and Technology Press,2008:110-120.
[11]王 科,张 犀,张志强等.FPSO型采油平台附加质量与阻尼力的分析研究[J].船舶力学,2011,15(1):40-47. Wang Ke,Zhang Xi,Zhang Zhiqiang,et al.Study on the added mass and damping force of FPSO oil production platform [J].Journal of Ship Mechanics,2011,15(1):40-47.
Research on the added mass of semi-submersible drilling platform based on numerical simulation
CHEN Bo,YU Zhi-yong,LI Xiao-jian
(School of Mechanical and Electrical Engineering,Lanzhou University of Technology,Lanzhou 730050,China)
In order to more complete know about impact factors clearly and the relationship among added mass components on the drilling platform,based on the numerical simulation method,using the software AQWA calculated 36 added mass components,and the corresponding results were calculated and compared with the mathematical model.AQWA analysis view shows that the platform added mass component changes with wave frequency;the types 1,2 and 3 platform added mass of sway direction are successively increasing,which corresponding platform area projection in plane xoz,while the surge direction of added mass value is connected with platform area projection in plane yoz;independent added mass component numbers calculated by the formula and numerical simulation are highly consistent.The relationship between the size of added mass of platform and the wave frequency is obtained;platform on the coordinate plane projection area size can reflect the size of the added mass in a certain extent;36 added mass components have 21 are independent.
semi-submersible drilling platform;added mass;numerical simulation; AQWA;added mass component
P75
A
10.3969/j.issn.1007-7294.2016.07.006
1007-7294(2016)11-1400-12
2016-06-05
兰州理工大学高水平科技项目培育基金
陈 博(1965-),女,高级工程师,E-mail:2921902969@qq.com;喻志勇(1990-),男,硕士研究生。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
海洋石油(2021年3期)2021-11-05
海洋石油(2021年3期)2021-11-05
中国海上油气(2020年5期)2020-10-20
当代陕西(2020年24期)2020-02-01
小哥白尼(趣味科学)(2019年5期)2019-08-27
小哥白尼(趣味科学)(2018年12期)2018-12-18
船海工程(2015年4期)2016-01-05
西南石油大学学报(自然科学版)(2015年5期)2015-04-16
天然气与石油(2015年2期)2015-02-28
