
基于RBF网络滑模变结构控制的导向钻井稳定平台研究
2016-05-03 07:34:06作者邱龙孙柯西安石油大学电子工程学院
电子制作 2016年7期
关键词:RBF神经网络
作者/邱龙、孙柯,西安石油大学电子工程学院
基于RBF网络滑模变结构控制的导向钻井稳定平台研究
作者/邱龙、孙柯,西安石油大学电子工程学院
文章摘要:针对摩擦问题对旋转导向钻井稳定平台存在影响,提出一种基于RBF神经网络滑模变结构控制方法。采用神经网络和滑模变结构相结合,能够提高稳定平台控制的精确性和抗干扰能力。实验结果表明,RBF神经网络滑模变结构控制方法能够有效的跟踪预设工具面角角位置,有较强的鲁棒性。
关键词:旋转导向钻井稳定平台;RBF神经网络;滑模变结构
引言
对稳定平台控制是旋转导向钻井系统的关键环节。在钻井过程中,钻井工具受井下复杂多变的工作环境影响,导致干扰稳定平台系统控制精度的参量较多。并且稳定平台跟随钻柱一直处于旋转状态,具有旋转摩擦的非常规运动特性,因此稳定平台受较多摩擦扭矩变化的影响较大。考虑上述因素,研究可靠的控制策略是十分必要和关键的。
本文提出滑模变结构控制器与RBF神经网络相结合来对旋转导线钻井稳定平台进行控制。主要是利用RBF神经网络具有高度非线性的连续时间动力系统这一特点,并且具有很强的自学习功能和对非线性系统的强大映射能力。最后结合滑模控制提高系统鲁棒性和抗干扰能力。
1.稳定平台模型
根据稳定平台在井下的工作方式,稳定平台可以被看作发电机式的单轴惯性稳定平台系统。旋转导向钻井稳定平台由两个涡轮电机,即上涡轮电机和下涡轮电机,电子控制仓及控制轴组成。
稳定平台广义被控对象数学模型可写为
其中ku为PWM脉宽调制系数,kE为电枢电流与电磁力矩之间的比例常数,kw为陀螺传感器转换系数,Ff为摩擦力矩,Fn为其他干扰力矩。
2.控制器设计
■2.1变结构控制器设计
■2.2RBF神经网络自适应滑模控制器设计
RBF神经网络是一种具有单隐层的高效的三层前馈式神经网络,具有最佳逼近性能和全局最优特性,且网络结构简单,训练速度快。

x为RBF网络输入,ci表示RBF网络第i个神经元的中心位置,bi为第i个神经元的宽度,wT为RBF网络权值。
其中,hi(x)为RBF网络输出
■2.3稳定性分析


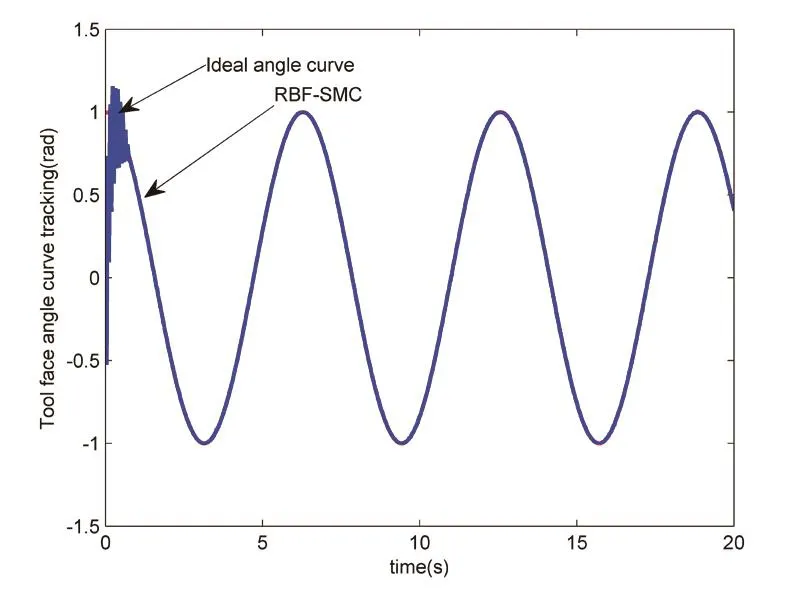
图1 工具面角跟踪曲线
3.仿真结果与分析
根据实验测得的稳定平台控制对象数据及对稳定平台的参数辨识,使用Matlab/Simulink仿真工具,使用上述RBF神经网滑模变结构控制方法对旋转导向钻井稳定平台控制系统进行仿真。
通过大量仿真实验,得到下面的仿真结果。
从图中可以看出,工具面角跟踪效果快速、准确,能够很好地达到控制要求。
4 结论
针对稳定平台在井下工作特点,提出一种RBF神经网络滑模变结构控制方法。该方法利用RBF神经网络逼近稳定平台数学模型,通过滑模变结构方法来增强系统鲁棒性,并能够保证控制系统的稳定性。仿真结构表明,该方法能够抑制摩擦力矩对系统产生的不利影响,消除滑模变结构控制产生的抖振现象。使被控系统具有良好的鲁棒性和较高的稳定平台姿态控制精度,控制性能得到了极大的改善。
【参考文献】
*[1]汪跃龙,王海皎,康思民等.导向钻井稳定控制平台的反馈线性化控制[J].石油学报,2014,35(5):952—957
*[2]霍爱清,贺昱曜,汪跃龙等.旋转导向钻井工具稳定平台模糊滑模控制研究[J].计算机仿真,2010,27(10):152—155.
猜你喜欢
计算机时代(2017年2期)2017-03-06 20:22:47
商情(2016年46期)2017-03-06 04:08:38
科教导刊·电子版(2016年26期)2016-11-21 09:50:44
科教导刊·电子版(2016年27期)2016-11-18 09:48:25
科教导刊·电子版(2016年25期)2016-11-16 22:09:46
电脑知识与技术(2016年25期)2016-11-16 14:27:21
科技视界(2016年18期)2016-11-03 23:59:24
电脑知识与技术(2016年7期)2016-05-19 11:13:37
企业导报(2016年6期)2016-04-21 15:48:21
现代电子技术(2015年21期)2015-11-09 21:51:32
