
基于MATLAB的轧机液压压下系统仿真分析
2016-04-22 09:08东鑫渊魏秀岭
工业技术创新 2016年1期
关键词:Matlab仿真
东鑫渊,魏秀岭
(西安思源学院,陕西西安,710038)
基于MATLAB的轧机液压压下系统仿真分析
东鑫渊,魏秀岭
(西安思源学院,陕西西安,710038)
摘要:本文以轧机液压压下控制系统为研究对象,研究其电液位置伺服系统。首先建立电液位置伺服系统数学模型,通过静态计算确定各元件参数和传递函数来拟定系统工作原理方块图。其次运用MATLAB对系统进行动态仿真,分析系统的各个动态品质。
关键词:轧机液压压下系统;电液位置伺服系统;MATLAB仿真
引言
厚度的自动控制是带材厚度控制的重要手段。轧机液压压下系统是机、电、液综合系统,由于采用电液伺服技术,使液压压下动态响应速度得以大幅提高,厚度控制所需时间大大缩短[1]。正由于液压压下具有快速响应特点,所以它在厚度控制过程中对提高成品板材的精度具有重要现实意义。本文采用机理建模方法,基于MATLAB软件搭建系统控制模型,从多角度的仿真结果判定该控制方法对带材厚度控制具有稳定性、快速性和准确性[1-2]。
1 轧机液压压下系统工作原理
电液位置伺服控制系统工作原理如图1所示。液压缸1用来控制负载弹簧位移,且位移通过传感器测得;液压缸2在实验过程中给系统施加一个干扰力。传感器测到的信号与给定信号作比较产生误差,按一定控制算法运算后产生输出信号。经过数模转换器把数字信号转换为模拟信号,再经放大器放大,将电流 输入到伺服阀1,伺服阀1根据电流大小改变阀芯位移,从而改变油液流量,来改变液压缸1活塞位移,直到活塞位移与给定的数值相同时,系统才停止。同理,电流 输入到伺服阀2中,伺服阀2传递给液压缸2,给系统施加一个干扰力[2]。
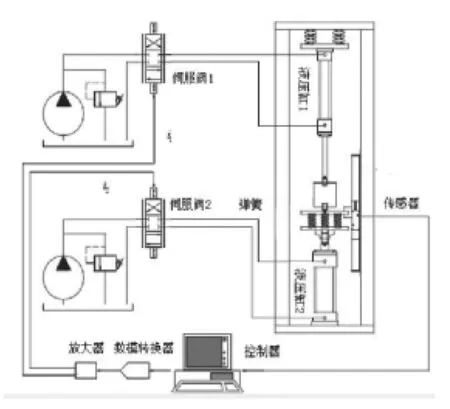
图1 电液位置伺服控制系统图
2 电液位置伺服系统的数学建模
电液位置伺服控制系统大体上由控制器、放大器、伺服阀、液压缸及负载和位置传感器五部分构成[3]。
(1)伺服放大器和位移传感器。伺服放大器和位移传感器的频宽比液压固有频宽高很多,可以视为一个比例环节,经拉氏变换为:Y=KfXp,式中:Kf为位移传感器的放大增益,Xp为活塞位移。
(2)电液伺服阀。电液伺服阀是液压控制系统的核心元件,其传递函数为:

式中:Ksv为电液伺服阀空载流量增益;ωv电液伺服阀固有频率;εv为电液伺服阀阻尼系数;s拉普拉斯算子;Ts为伺服阀的时间常数。
(3)阀控液压缸。该函数是根据伺服阀的负载流量、流量的连续性方程及液压缸和负载力平衡方程建立得到的[4],即:
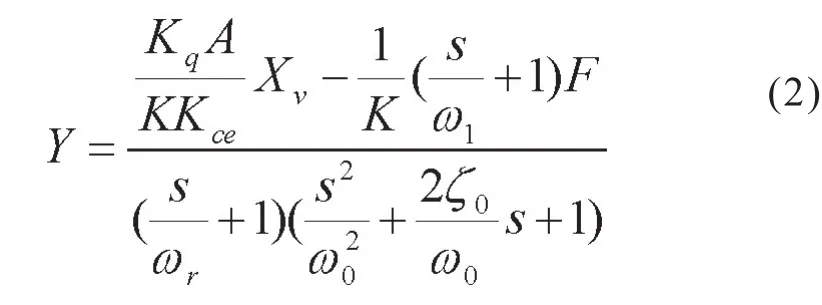
式中:Kce为总流量压力系数;ω1为液压弹簧刚度与阻尼系数之比;F为外负载;K弹簧负载刚度;ωr为液压弹簧与负载弹簧串联耦合时刚度与阻尼系数之比。
3 仿真分析
在不考虑干扰力 的情况下,由图2所示的电液位置伺服系统的方块图,可得到系统的开环传递函数为:

(1)时域分析
一般阶跃输入对系统来说是最为严峻工作状态,若系统在阶跃作用下的动态性能满足要求,在其他形式下也能满足[5]。由上式得系统无开环零点,开环极点为-398,-787±1363j。

图3 系统的阶跃和脉冲响应
由图3可知:控制系统的延迟时间td≈0.002s,过渡时间ts≈0.01s,响应速度稍慢,但此系统响应为单调变化,无振动且响应无超调,说明系统动态品质较好。
(2)由根轨迹判断系统稳定性
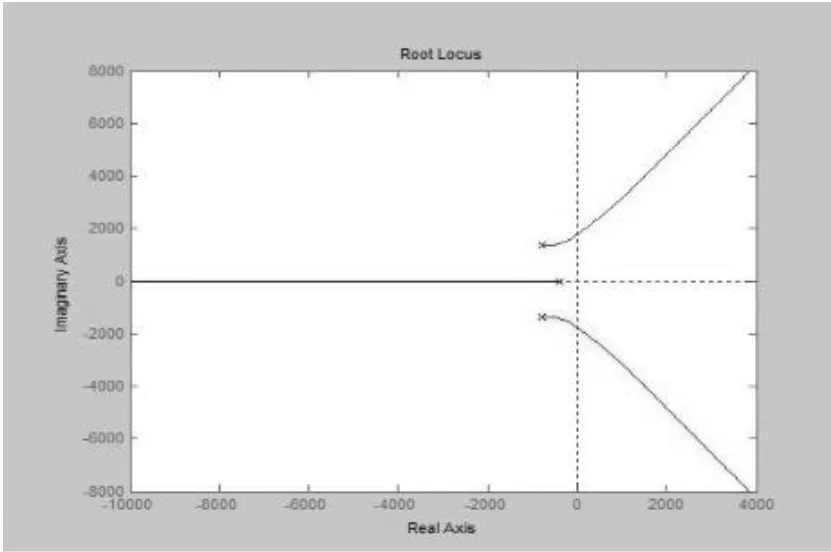
图4 系统根轨迹
由图4可知,当系统的根轨迹超越虚轴时,系统不稳定。当根轨迹与虚轴相交时,系统处于临界稳定状态。则可以令:

即:s3+1972.6s2+3.11×108s+(1+Kg)=0。根据劳斯判据求解和系统根轨迹图,可知当系统稳定时:0<Kg<4.98。
(3)分析系统开环伯德图及稳态误差
当开环传递函数放大系数Kg分别取1、2、3、4时,根据系统伯德图可得:无论Kg取何值,在伯德图低频段,输入与输出近似相等,相位变化小;在高频段,输出约成指数关系下降,相位角趋于恒定值。由于Kg是在特征根均具有负实部稳定性判定原理基础上求得,此系统可称为最小相位系统。当相角裕度γ大于零,幅值裕度h大于1时,系统稳定,且γ和h越大越稳定[3]。当γ在30°~70°之间,意味着开环对数幅频曲线在幅值穿越频率附近斜率应大于-40dB/dec,且有一定宽度。综上所述,此系统应取放大系数为Kg=3最好。
4 结论
根据轧机液压压下的电液伺服系统的数学模型,运用MATLAB对该系统的传递函数进行动态仿真分析,判断系统稳定性,响应时间等,从而得到满足要求的电液位置伺服控制系统。同时,说明该方法对电液伺服系统分析具有快捷、准确等特性。
参考文献
[1]赵云金.电液位置伺服系统的鲁棒控制[D].太原:太原科技大学,2009.
[2]王勇亮,卢颖.基于MATLAB的电液位置伺服系统仿真分析[J].机床与液压,2015,06:150-152.
[3]宋志安.基于MATLAB的液压伺服控制系统分析与设计[M].北京:国防工业出版社,2002.
[4]翟富刚,闫桂山.基于MATLAB/Simulink的轧机液压AGC系统建模与仿真分析[J].装备制造技术,2014,08(11):1-4.
[5]王勇亮,卢勇.基于MATLAB的电液位置伺服系统仿真分析[J].机床与液压,2013,06:150-152.
东鑫渊,硕士,从事机械、车辆工程方向。
E-mail:dxy_550@126.com
魏秀岭,硕士,从事机械工程方向。
E-mail:383902719@qq.com
Simulation Analysis of Rolling Mill Hydraulic Press Down System Based on MATLAB
Xinyuan Dong,Xiuling Wei
(Xi’an Siyuan University,Xi’an,Shanxi,710038,China)
Abstract:The subjects of study for hydraulic automatic gauge control system in a rolling mill and its electro hydraulic position servo system.Firstly,the mathematical model of electro hydraulic position servo system is established,and the parameters and transfer function of each component are determined by static calculation.Secondly,the dynamic simulation of the system is carried out by using MATLAB,and the dynamic quality of the system is analyzed.
Key words:Hydraulic press down system of rolling mil;Electro hydraulic position servo system;MATLAB simulation
作者简介:
DOI:工业技术创新 URL:http//www.china-iti.com10.14103/j.issn.2095-8412.2016.01.006
中图分类号:TN249
文献标识码:A
文章编号:2095-8412(2016)01-644-03
猜你喜欢
现代情报(2016年11期)2016-12-21
科学与财富(2016年26期)2016-12-01
科技视界(2016年21期)2016-10-17
电脑知识与技术(2016年12期)2016-06-14
电脑知识与技术(2016年9期)2016-05-18
考试周刊(2016年11期)2016-03-17
现代电子技术(2015年17期)2015-09-23
现代电子技术(2015年18期)2015-09-16
现代电子技术(2015年10期)2015-05-29
无线互联科技(2015年2期)2015-04-02
