基于WinCE的搬运机器人示教软件设计
2016-04-18 08:09蒋劲峰
装备机械 2016年3期
□张 力 □蒋劲峰 □吕 燕
上海电气集团股份有限公司中央研究院上海200070
基于WinCE的搬运机器人示教软件设计
□张 力 □蒋劲峰 □吕 燕
上海电气集团股份有限公司中央研究院上海200070
设计了一种基于WinCE操作系统的机器人示教软件,阐述了示教软件的功能模块,特别是串行通信模块中RS485总线通信关键技术。通过串行通信实现机器人语言的解释,开发了功能完善、友好、灵活的人机交互界面。实验表明,示教软件性能稳定、实时性好、可操作性强,为搬运机器人示教系统提供了一种有效的解决方案。
示教器;计算机;操作系统;串行通信;人机界面
1 搬运机器人示教概念
搬运机器人示教指操作员在实际工作环境中,通过操作示教器将要实现的任务命令传输至搬运机器人控制器,控制器接收到对应的命令来控制搬运机器人实现指定的位姿,然后在示教器中用机器人语言存储记录运动轨迹上各示教点的位姿参数和动作参数,最终通过示教器控制程序的运行,实现示教的再现[1-3]。
笔者介绍了上海电气集团股份有限公司中央研究院自动化技术研发中心研制的示教系统,该系统以WinCE为操作系统,通过采用模块化的软件架构开发出友好的人机界面,实现了对沃迪四轴搬运机器人进行远程操作和示教再现的功能。
2 搬运机器人控制系统
沃迪四轴搬运机器人控制系统主要结构如图1所示,包括示教编程器、控制器(运动控制模块)、伺服驱动器和伺服电机等,其中,示教器、控制器和驱动器属于控制系统。用户通过操作机器人示教器来输入命令,命令经RS485总线传输至机器人控制器,进而控制本体完成相应的任务。示教器软件系统选用WinCE操作系统,所配套的硬件平台具有良好的稳定性和可拓展性。
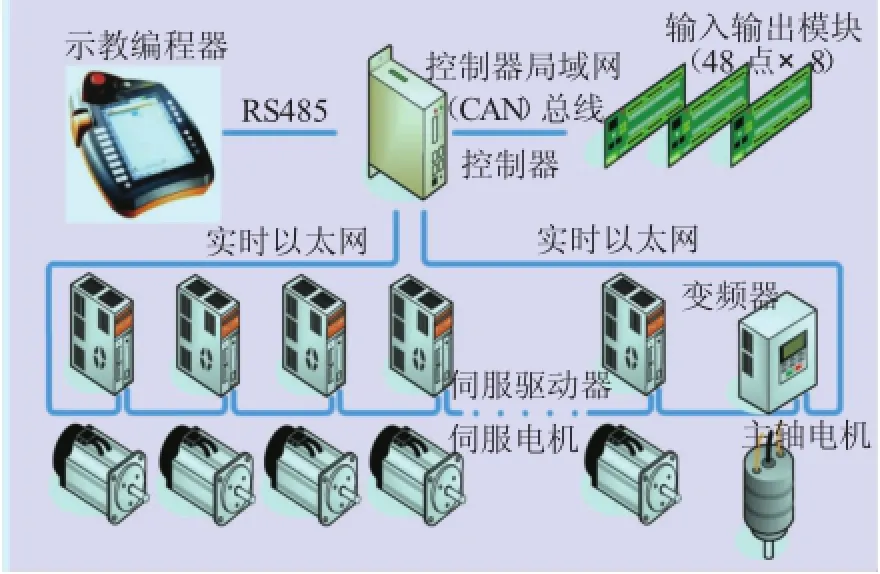
图1 多轴运动控制系统结构图
3 示教软件功能模块划分和设计方案
搬运机器人控制系统的软件设计采用上下位机的结构,示教编程器为上位机,控制器为下位机,上下位机的软件功能架构如图2所示。多轴运动控制器作为机器人控制系统的主设备,运行在实时操作系统环境中,主要包括机器人语言解析、坐标解算、前看速度规划、可编程序控制器(PLC)指令解析和插补控制等功能。示教编程器的主要功能模块包括人机交互界面模块、与控制器通信模块、参数监控模块等。为了确保安全性,系统参数采用多级用户权限管理,并提供参数的备份与恢复功能。针对搬运机器人码垛作业的需求,示教编程器通过宏指令的形式实现对运动参数的简化编程,方便编程人员实现复杂的码垛动作。
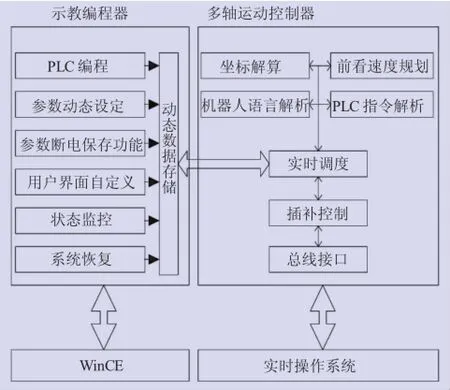
图2 控制系统软件架构框图
示教器硬件核心架构采用ARM嵌入式处理器,软件设计以WinCE为操作系统。为简化示教编程软件的设计,便于软件的再移植,示教器软件系统不涉及具体的运算与控制功能,主要负责人机交互和显示。
示教器软件的运行流程如图3所示。在开机启动后,软件系统进行一系列的参数初始化工作,解决异常情况后即对机器人各轴进行复位操作,然后进入操作模式选择界面。为了方便用户操作,系统分为手动模式、自动模式和示教编程模式。手动模式下,操作者可以选择运行参数,并对各轴进行点动操作。自动模式下,在用户已处理好流程、设定好参数后,系统快速开机工作,而不需要再次进行多种参数的设定。示教编程模式下,用户可以对机器人进行编程,根据预先设计好的轨迹,将机器人运行轨迹上的位姿用编程语言进行记录,然后保存,需要时打开程序后系统即可自动运行。
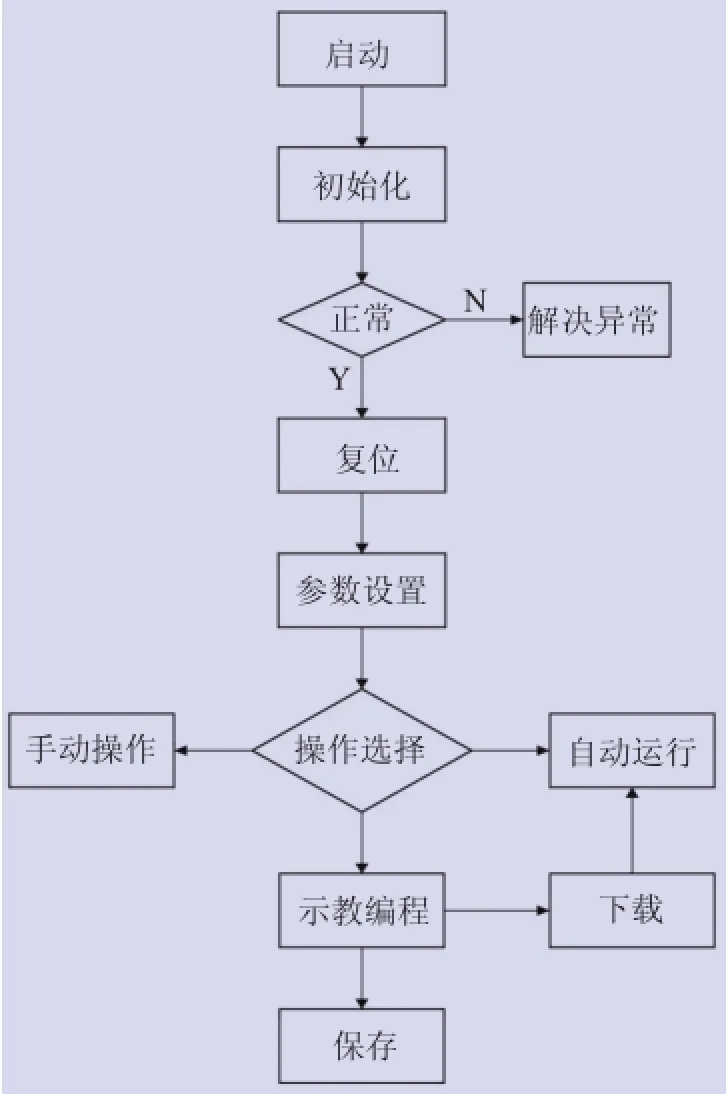
图3 示教器运行流程
4 示教器与控制器通信的实现
4.1 通信方式
在一般的工业机器人控制系统中,示教器和控制器之间都需要通过一种通信方式来完成数据的传输和交互,从而实现相应的操作。工业领域中常用的通信方式有串行通信、并行通信、通用串行总线(USB)通信、以太网通信等。笔者用串行通信中的RS485总线通信方式,它具有布线简单、成本低、干扰小、性价比高等优点,可以满足系统中示教器与控制系统的通信要求[4-6]。采用的通信协议是Modbus RTU,以字节为单位进行异步信息传输。在主站和从站之间传递的通信报文的信息帧格式如图4所示。
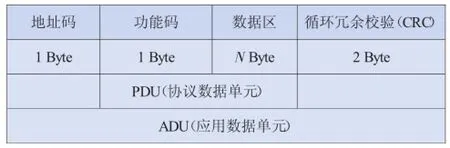
图4 Modbus RTU信息帧格式
功能码用于区分数据传输的类型。地址码用于示教器控制系统的地址映射。数据区表示请求或返回的数据。当读取数据时,发出的功能码是03H,当写入数据时,发出的功能码是10H,可对多个寄存器写入数据[7]。
以下是一个示教器与控制器之间数据传输的实例:01 03 05 AA 00 0A E5 21。此例表示示教器查询从控制器寄存器1451到1460的数据,其中,地址码为0X01,起始寄存器为1451(0X05AA),读取10 Byte的数据,0XE521为CRC码。
系统运行时示教器和控制器之间的通信过程如图5所示。
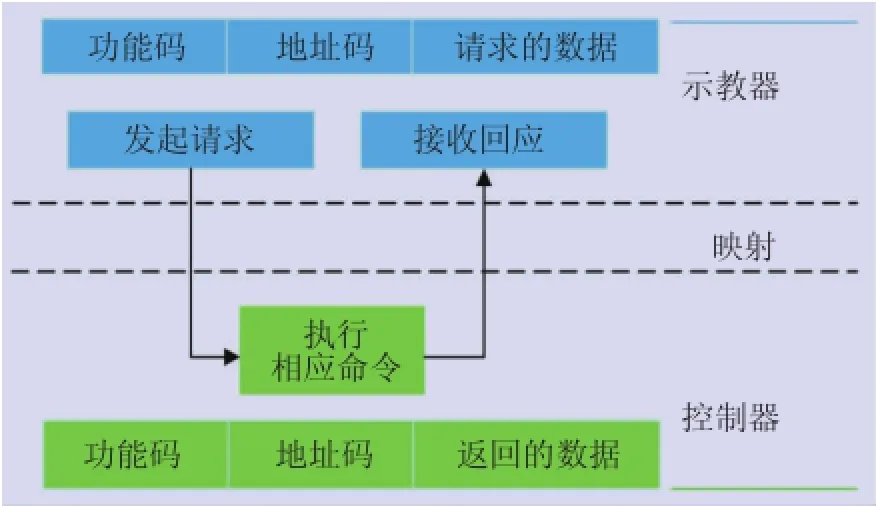
图5 示教器与控制器通信过程图
4.2 程序解释模块的实现
程序解释模块作为机器人系统的重要组成部分,对机器人语言源码进行译码和数据处理,生成运动控制卡能够识别的对应目标代码。由于系统中示教器硬件核心是ARM板,其数据存储和数据处理能力不足以支持程序解释过程,因此通过与机器人控制器的数据交互来实现该功能[8-10]。
示教器的人机交互界面模块与控制器的译码模块通过接口函数来实现数据的相互传递,具体实现过程如图6所示。
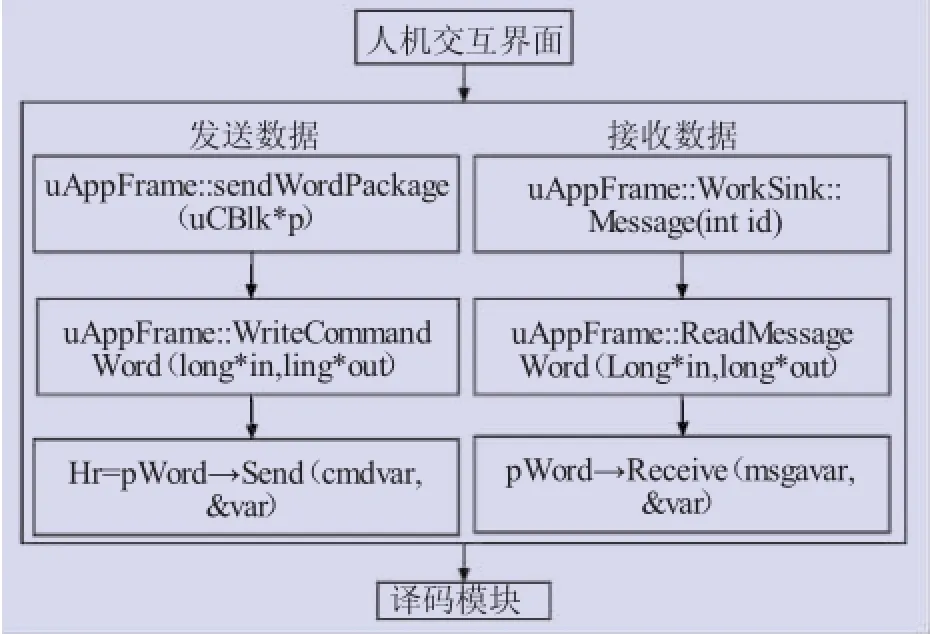
图6 人机界面与译码模块数据交互实现
5 示教软件界面设计
在设计搬运机器人示教软件的界面时,以功能齐全和界面清晰、灵活为设计理念。为了确保良好的操作体验,采用了WinCE操作系统及.NET开发框架,针对触控操作进行界面优化,方便操作者对机器人进行灵活控制。
5.1 运动控制界面
示教软件一共包含11个界面,主要包括手动运行、自动运行、示教、PLC监控、参数设置等,其中,手动操作界面如图7所示,主要功能包括A~E轴(E轴为备选轴,暂不使用)坐标定时刷新显示、各轴速度控制(高速、中速、低速)、点动操作等。

图7 手动操作界面
5.2 示教界面
示教功能共有两种实现方式:在线示教和离线示教。由于离线示教不便于现场操作,且工作量大、精度低,所以系统设计采用在线示教方式。下面介绍在线示教方式的实现过程。
在手动操作界面下,将机器人各轴运行到指定坐标,然后切换到如图8所示的示教界面。点击“读取当前位置”按钮,即可将此时的机器人位姿记录到示教界面的当前行,重复上述操作即可将机器人运动轨迹上的各示教点依次记录下来。通过“保存”按钮可以将当次编辑的示教程序保存在示教器中,便于以后重复调用。
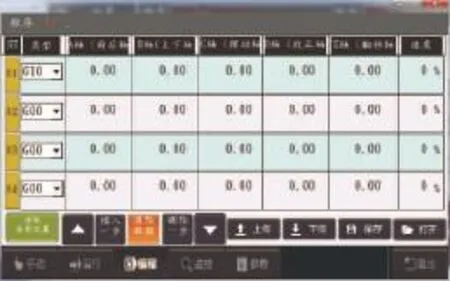
图8 示教界面
6 结论
详细介绍了搬运机器人示教软件的主要功能和界面设计。软件采用模块化的开放式软件架构系统,具备人机交互、示教再现、参数管理等功能。具体实验表明,该示教软件功能完善、性能良好,很好地满足了沃迪搬运机器人在工业现场的应用需求,为机器人示教系统提供了一种有效的解决方案。
[1]中国标准出版社第三编辑室.中国机械工业标准汇编:工业机器人卷[M].2版.北京:中国标准出版社,2009.
[2]吕亭强,罗庆生,姚猛.工业码垛机器人示教技术的研究与改进[J].计算机测量与控制,2011,19(4):950-953.
[3]张连新,高洪明,吴林,等.弧焊机器人示教编程器的设计[J].焊接学报,2006,27(8):103-107.
[4]洪鹰,王乐.基于嵌入式计算机的机器人示教器研究[J].计算机工程与应用,2013,49(1):78-81.
[5]吕国芳,唐海龙,李进.基于Modbus RTU的串口调试软件的实现[J].计算机技术与发展,2009,19(9):236-238,241.
[6]张明勇.基于Windows/RTX的码垛机器人控制系统软件设计[D].上海:上海交通大学,2013.
[7]冯月晖.MOTOMAN示教编程方法[J].西南科技大学学报,2005,20(2):20-22.
[8]边广韬,叶长龙,赵建国.机械手的一种轨迹规划[J].沈阳工业大学学报,2001,23(6):490-491.
[9]张丰华,韩宝玲,罗庆生,等.基于PLC的新型工业码垛机器人控制系统设计[J].计算机测量与控制,2009,17(11):2191-1293,1296.
[10]马香峰,余达太.工业机器人的操作设计[M].北京:治金工业出版社,1996.
上海电气智能电子轨道试验线开通
据中国上海门户网站报道,上海电气智能电子轨道项目临港试验线建设项目已正式开工,预计将于2016年年底建成试运行。智能交通自动化解决方案是电气集团自动化产业重点发展的方向之一。智能电子轨道临港试验线位于上海电气临港重装基地,全长4.2 km,是基于道路磁钉传感技术的新型大容量高效自动化主干道交通运输系统,可以利用智能装备手段提升传统运输工具能级,增大城市运输效率。作为国内首条电子轨道试验线,临港试验线建成后的运营效果将直接影响电子轨道交通在上海乃至全国的市场推广。
A robot teaching software was designed based on WinCE operating system.An introduction was given on the function modules of the teaching software,especially the key technologies for communication by RS485 bus in the serial communication module.A friendly,flexible interactive interface with sound functions could be developed through the interpretation of the robot language via serial communication.Experiments show that the teaching software is stable in real-time performance with sound operability and it can provide an effective solution for the teaching systemin handling robot.
Teaching Pendant;Computor;Operating System;SerialCommunication;HMI
TH122;TP242.2
A
1672-0555(2016)03-005-04
2016年3月
张力(1990—),男,硕士,工程师,主要从事机器人运动控制工作
猜你喜欢
煤气与热力(2021年12期)2022-01-19
当代陕西(2020年13期)2020-08-24
上海建材(2020年12期)2020-04-13
制造技术与机床(2017年5期)2018-01-19
中国材料进展(2016年10期)2016-12-26
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28