
实验尺度无人水下滑翔机设计与试验
2016-04-18 01:41杨海刘雁集张凯
中国舰船研究 2016年1期
杨海,刘雁集,张凯
1中国舰船研究设计中心,上海2011082上海交通大学海洋工程国家重点实验室,上海200240
实验尺度无人水下滑翔机设计与试验
杨海1,刘雁集2,张凯2
1中国舰船研究设计中心,上海201108
2上海交通大学海洋工程国家重点实验室,上海200240
摘要:无人水下滑翔机是一种高效的水下机器人。实尺度滑翔机在一般水池内很难形成稳态的滑翔运动,不便于研究分析其动力学问题,因此设计一种实验尺度的水下滑翔机,详述滑翔机的设计、建模、控制与试验研究。首先,简述实验尺度滑翔机结构,利用CFD软件计算壳体的水动力参数。然后,根据机体的内部质量分布,建立滑翔机的动力学模型。最后,设计垂直剖面运动的线性二次型调节器(LQR)控制器与线性Kalman观测器,并在观察环节加入一定量的白噪声干扰。仿真结果表明,设计的控制器与观测器可在一定量干扰存在的情况下保证机体的正常运行。水池试验的结果表明,设计的滑翔机可在3 m水深范围完成稳态滑翔运动,并具有良好的稳定性及操纵性。
关键词:水下滑翔机;水动力参数;Kalman观测器;水池试验
0 引 言
无人水下滑翔机是浮力驱动、带有固定机翼的无人水下航行器。由于其高效的运动方式,在海洋环境的采样及监测领域具有广泛的应用前景,近年来,受到越来越多的重视。目前,国内外已经有多种成熟的实尺度滑翔机[1-4],而且诸多新型样机正不断问世。
实尺度常规滑翔机主体长2 m左右,其锯齿形的运动形式决定了滑翔机的大深度运行特性,而在常规水池深度范围内(3~10 m),很难形成充分的稳态滑翔运动。为便于分析滑翔机的动力学特性,普林斯顿大学的Leonard等[5]设计了实验尺度滑翔机ROGUE,其椭球形的外壳简化了水动力参数,位于浮心的浮力系统不对动力学产生影响,LQR控制仿真不仅验证了模型的优良特性,而且初步探讨了现代控制理论在滑翔机上的应用效果。密歇根州立大学的Zhang等[6]设计了仿生鱼外形的滑翔机,机体重4 kg,长0.5 m,开环控制试验验证了其良好的机动性。密歇根理工大学的Mitchell等[7]设计了简易的、低成本的水下滑翔机GUPPIE,该滑翔机没有俯仰微调机构,而是利用置于机体前端的注射式浮力调节机构同时调节浮力与俯仰角度。
以上实验尺度滑翔机在结构上做了简化,如将浮力机构置于浮心处,从而使动力学模型变得简单。但实际应用的滑翔机往往具有多个偏心质量,为此,应设计具有复杂结构的实验尺度水下滑翔机以充分研究滑翔机各部分对动力学特性的影响。
本文拟设计一种实验尺度无人水下滑翔机,主体长0.615 m,重5.38 kg,通过置于尾部的浮力调节机构改变自身浮力,采用无线通讯模式,并利用快速控制模型技术实现对滑翔机的实时监控,以为动力学及控制算法研究提供试验平台。
1 滑翔机设计与水动力参数确定
水下滑翔机的运动由浮力调节机构与姿态调节机构共同调节控制。其中:浮力调节机构不仅调节浮力,同时还调节俯仰角度;姿态调节机构辅助微调姿态,以使滑翔机可以比较精确地跟踪设定轨迹。
综合考虑水动力性能与制作成本等因素,本文设计的水下滑翔机主体为圆柱形,前端导流罩为半圆球体,后端导流罩为半椭球体。滑翔机如图1所示,机体的浮力调节机构、姿态调节机构、电控系统等均安装在内部支架上。
水下滑翔机的水动力参数是设计机体内部机构的依据,垂直平面内的阻力D、升力L和俯仰力矩MDL可分别表示为[5]:

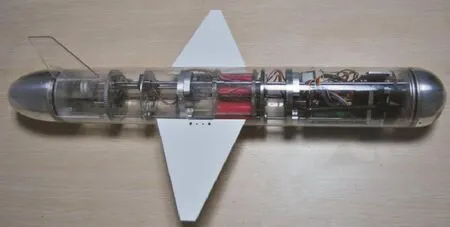
图1无人水下滑翔机Fig.1 Autonomous underwater glider
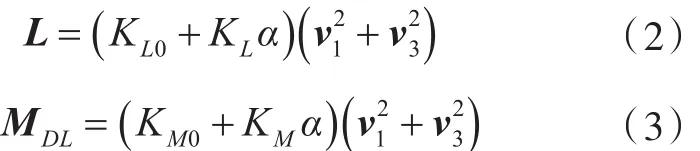
式中:v1和v3分别为滑翔机在纵向和垂向的平移速度;α为攻角;KD0,KD,KL0,KL,KM0,KM均为水动力系数。
基于CFD计算垂直剖面内滑翔运动的阻力系数、升力系数及俯仰力矩系数,模拟计算如图2所示。计算所得各参数与攻角的关系如图3所示。拟合式(1)~式(3),得各水动力系数KD0= 0.197 8,KD= 15.42,KL0= 0,KL= 73,KM0= 0,KM= -3.68。

图2基于CFD计算的滑翔机水动力参数Fig.2 Hydrodynamic parameters of underwater glider based on CFD
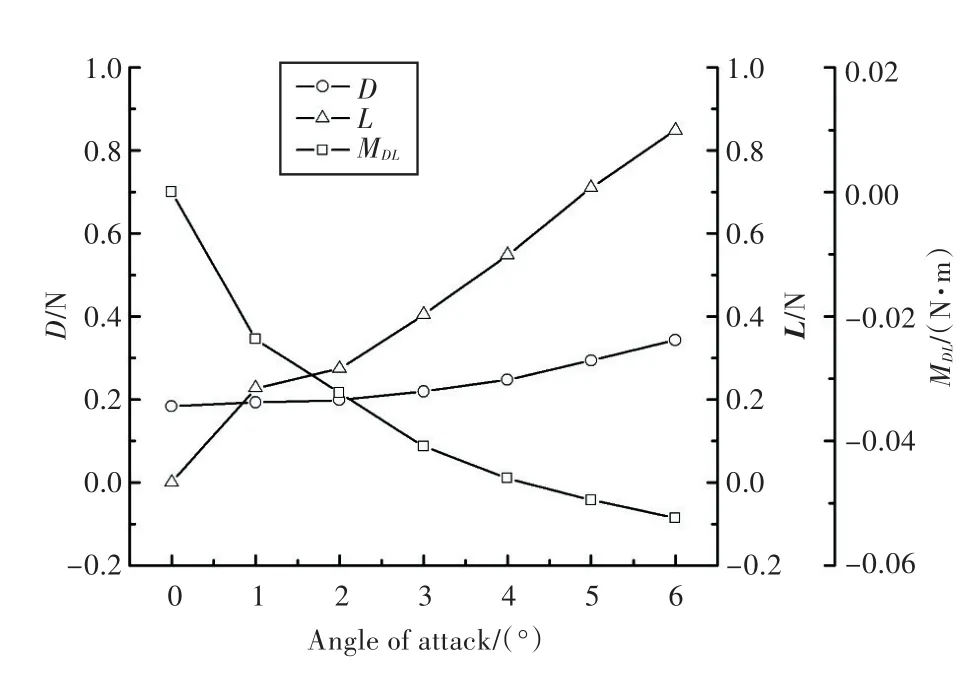
图3水动力参数与攻角的关系Fig.3 Hydrodynamic parameters vs. attack angle
2 动力学模型
水下滑翔机内部机构的位置变化会对机体运动产生影响。为精确控制滑翔机运动,需要建立精确的动力学模型。
本文所设计的滑翔机内部结构如图4所示。图中:俯仰调节重块1的质量为mˉ;连接盘2的质量为mc,连接丝杠螺母与活塞3,活塞连杆固定在连接盘2上;可变容积腔体4的质量为mb,随吸排液体体积变化而变化;直线轴承5固定在连接盘2上。

图4机体内部结构Fig.4 Internal structure of the glider
水下滑翔机动力学参数如表1所示。
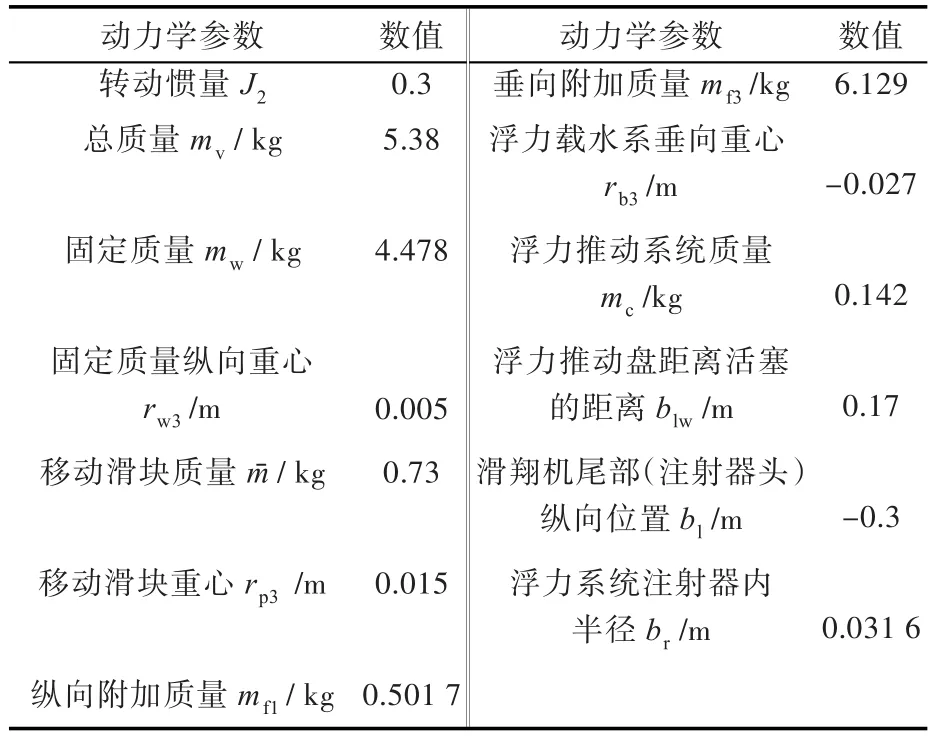
表1滑翔机参数Tab.1 Glider parameters



式中:w1为滑动质量mˉ的移动加速度;w2为可变质量mb的质量变化速率;m0为净浮力质量;g为重力加速度。
3 控制器与观测器设计
3.1 LQR控制器设计

对滑翔机的滑翔角度由-20°~20°的转换过程进行仿真,在第12 s打开控制器,得到主要状态变量的变化过程如图5所示。
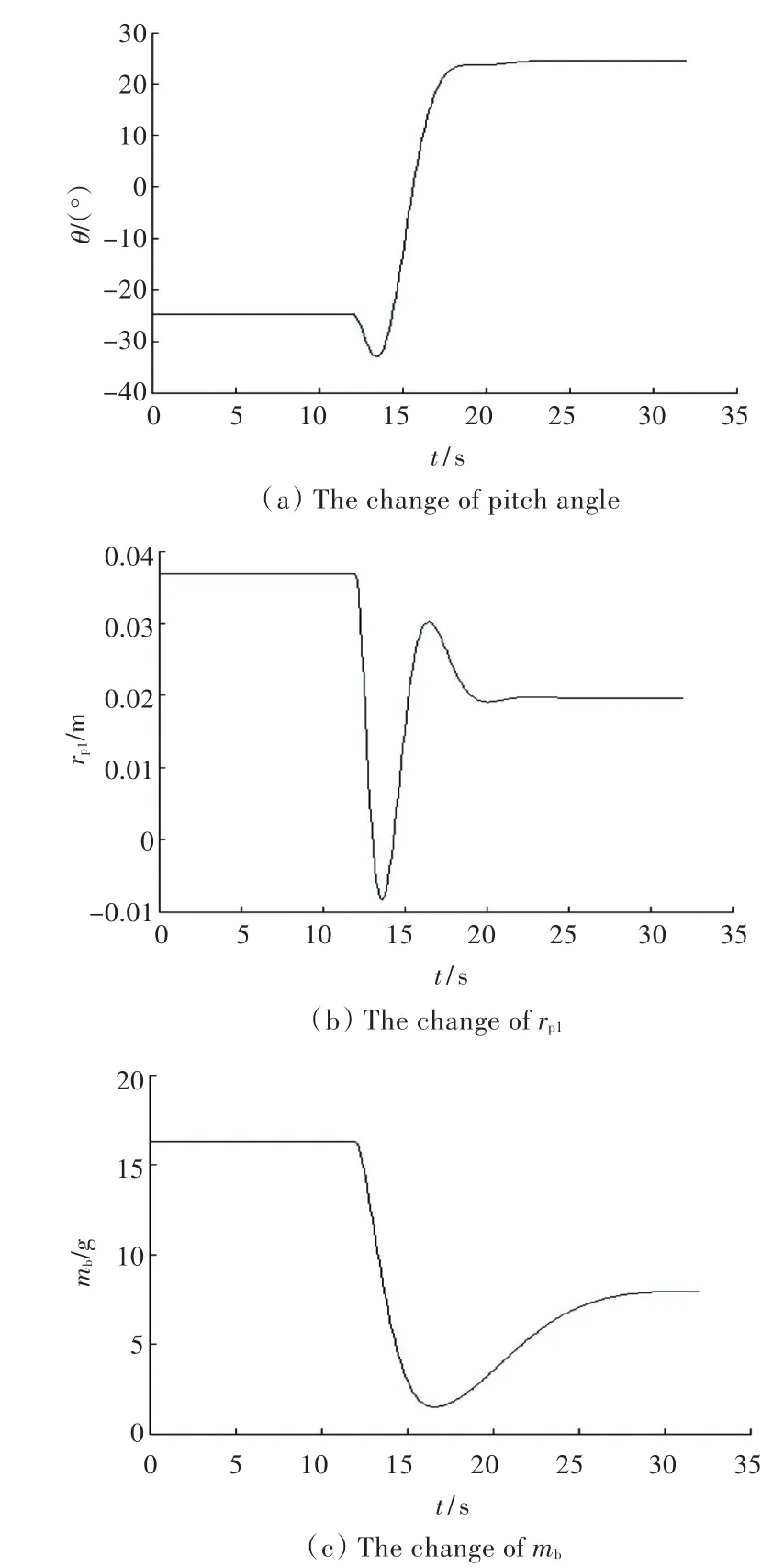
图5状态变量的变化轨迹Fig.5 Trajectories of the state variables
控制转换过程中的滑翔路径如图6所示,在控制器开启后,水下滑翔机仍向下滑翔了0.3 m。在设置滑翔机设计及运行参数时,必须考虑到这一因素,避免耐压壳体受损。

图6设定路径与仿真路径Fig.6 Set path and simulated path
3.2 Kalman观测器设计
对于实际运行的水下滑翔机,可直接测量的反馈量通常为俯仰角度、滑块位置及浮力系统可变部分质量。设计Kalman观测器估计滑翔机的状态变量。Kalman观测器方程描述如下:

式(25)为状态估计方程,式(27)为误差协方差更新公式。式中:为状态估计值;u为输入变量;A和B分别为在平衡点线性化后的状态矩阵和输入矩阵;H为输出矩阵;K为误差增益;z为实测输出(此处为滑块位置、俯仰角度与浮力系统质量3个变量);P为误差协方差;R为观测噪声协方差,取观测噪声方差为0.2,噪声均值为0。则有


对滑翔机的滑翔角度由-30°~30°的转换过程进行仿真,Kalman观测器初始值与状态变量初始值相同。在测量环节加上均值为0.01的白噪声干扰,得俯仰角度的变化如图7所示。
4 水池试验

图7加入白噪声干扰的观测值Fig.7 Observation value with white noise
为简化试验过程,又方便控制方法的实现,本文采用上位机和下位机实时通讯的方法实现控制信号的传输和滑翔机数据的采集。利用NI的Veristand搭建滑翔机的快速控制原型。Veristand用于实现与下位机的数据交互。Labview共享Veristand中定义的变量,并做图形予以显示,以方便监控。一对通讯频率为868 MHz的无线模块实现上位机与下位机的实时通讯,其中一个位于机体耐压舱内,工作时运行于水下环境;另一个位于试验台上,与上位机相连。该通讯频率具有较好的穿透性,信号在水中衰减较慢。监控系统构成如图8所示。

图8监控系统Fig.8 Monitoring and control system
试验中,首先将活塞位置、滑块位置调节到设计零点,然后再将滑翔机调整至悬浮状态。试验开始时,通过上位机设置目标滑翔角对应的滑块位置,以及能提供目标净浮力的对应的活塞位置。一个动态精度为±0.2°的惯性导航传感器测量角度值,一个工作深度为50 m的压力变送器测量深度,并利用电机编码器反馈滑块及浮力推动机构的位置信息。
试验过程滑翔机各运行参数如图9所示。

图9实测状态量Fig.9 Measured values
由图9可看出,滑块的位移响应较快,但角度响应出现了明显的欠阻尼现象,有较大振荡。由图9(c)可看出,振荡过程会影响到机体的滑翔路径。在滑翔机实际运行过程中,可减慢内部滑块的调节速度以提高机体运行路径的精度。
滑翔过程的视频截图如图10所示。

图10水池试验中的滑翔机Fig.10 Glider in a tank
5 结 语
本文介绍了一种实验尺度无人水下滑翔机的设计、建模、仿真与试验。机体包含多个可移动部分,建立的动力学模型充分描述了各部分对动力学的影响,并利用CFD方法确定了水动力参数,探讨了滑翔机的浅深度滑翔特性。设计了LQR控制器,结合Kalman观测器实现了对滑翔机的实时监控,仿真结果表明,设计的控制系统在具有一定观察噪声的环境下可以保证系统正常运行。试验结果表明,该滑翔机具有较好的稳定性与操纵性,可在3 m深度范围内完成长时间的稳态滑翔运动,能为动力学及控制算法研究提供试验平台。
下一步将继续完善滑翔机,提高其性能。基于水池试验,辨识更多的水动力参数及机械结构参数。进一步提高实时通讯速率,实现高级的控制算法在滑翔机上的应用。
参考文献:
[1]ERIKSEN C C,OSSE T J,LIGHT R D,et al. Seaglid⁃er:a long-range autonomous underwater vehicle for oceanographic research[J]. IEEE Journal of Oceanic Engineering,2001,26(4):424-436.
[2]SHERMAN J,DAVIS R E,OWENS W B,et al. The
autonomous underwater glider“Spray”[J]. IEEE Jour⁃
nal of Oceanic Engineering,2001,26(4):437-446. [3]WEBB D C,SIMONETTI P J,JONES C P. SLOCUM:an underwater glider propelled by environmental energy [J]. IEEE Journal of Oceanic Engineering,2001,26 (4):447-452.
[4]IMLACH J,MAHR R. Modification of a military grade glider for coastal scientific applications[C]//IEEE Oceans 2012. Hampton Roads,VA:IEEE Press,2012:1-6.
[5]LEONARD N E,GRAVER J G. Model-based feed⁃back control of autonomous underwater gliders[J]. IEEE Journal of Oceanic Engineering,2001,26(4):633-645.
[6]ZHANG F T,THON J,THON C,et al. Miniature un⁃derwater glider:design and experimental results[J]. IEEE/ASME Transactions on Mechatronics,2014,19 (1):394-399.
[7]MITCHELL B,WILKENING E,MAHMOUDIAN N. Developing an underwater glider for educational pur⁃poses[C]//2013 IEEE International Conference on Ro⁃botics and Automation(ICRA). Karlsruhe:IEEE Press,2013:3423-3428.
[8]YANG H,MA J. Nonlinear control for autonomous un⁃derwater glider motion based on inverse system method [J]. Journal of Shanghai Jiaotong University(Sci⁃ence),2010,15(6):713-718.
[9]杨海.考虑输入受限的水下滑翔机前馈控制设计[J].中国舰船研究,2014,9(6):87-91,99. YANG Hai. Feedforward control design for autonomous underwater gliders under input constraints[J]. Chinese Journal of Ship Research,2014,9(6):87-91,99.
[10]YANG H,MA J. Nonlinear feedforward and feedback control design for autonomous underwater glider[J]. Journal of Shanghai Jiaotong University(Science),2011,16(1):11-16.
Design and experiment for laboratory-scale autonomous underwater gliders
YANG Hai1,LIU Yanji2,ZHANG Kai2
1 Shanghai Division,China Ship Development and Design Center,Shanghai 201108,China
2 State Key Laboratory of Marine Engineering,Shanghai Jiao Tong University,Shanghai 200240,China
Abstract:The autonomous underwater glider is a type of highly efficient autonomous underwater vehicle. Aiming at the problem that full-scale legacy gliders have difficulties in forming steady gliding movement in typical tanks, which induces obstacles in their dynamics analysis, a laboratory-scale glider is designed in this paper, where the glider design, modeling, control,and experimental research are described in detail. Firstly, the structure of the glider is described, and hydrodynamic parameters are calculated based on CFD. Secondly, the glider's dynamic governing equation is established according to the internal mass distribu⁃tion. Finally, the Linear Quadratic Regulator(LQR)controller and the Kalman observer are designed, and certain amount of white noise is added into the observation process. The simulation results show that the controller and observer ensure the normal operation of the glider in the presence of noise, and the glider can achieve steady gliding motion at 3 m depth range, suggesting good stability and maneuverability.
Key words:underwater glider;hydrodynamic parameters;Kalman observer;tank test
作者简介:杨海(通信作者),男,1981年生,博士,工程师。研究方向:船舶动力装置,海洋无人化装备。E-mail:sjtu240yh@163.com刘雁集,男,1987年生,博士生。研究方向:水下滑翔机。E-mail:y.j.liu@sjtu.edu.cn
收稿日期:2015 - 05 - 25网络出版时间:2016-1-19 14:55
中图分类号:U661.71
文献标志码:A
DOI:10.3969/j.issn.1673-3185.2016.01.013
网络出版地址:http://www.cnki.net/kcms/detail/42.1755.TJ.20160119.1455.028.html期刊网址:www.ship-research.com
引用格式:杨海,刘雁集,张凯.实验尺度无人水下滑翔机设计与试验[J].中国舰船研究,2016,11(1):102-107,120. YANG Hai,LIU Yanji,ZHANG Kai. Design and experiment for laboratory-scale autonomous underwater gliders[J]. Chinese Journal of Ship Research,2016,11(1):102-107,120.
