
新概念穿梭艇自航模操控系统试验研究
2016-04-18 01:41王健刘旌扬魏成柱李英辉易宏
中国舰船研究 2016年1期
王健,刘旌扬,魏成柱,李英辉,易宏
上海交通大学海洋工程国家重点实验室,上海200240
新概念穿梭艇自航模操控系统试验研究
王健,刘旌扬,魏成柱,李英辉,易宏
上海交通大学海洋工程国家重点实验室,上海200240
摘要:自航模试验是研究船舶性能的有效手段。针对新概念穿梭艇,设计一种自航模操控系统。该系统包括岸上操控系统和船载自航控制系统2部分,利用无线局域网完成岸上操控系统与船载自航控制系统之间的通信;执行机构配备传感器获取反馈数据,驱动器采用成熟的可编程元件;使用Python语言编写下位机和上位机软件。将系统成功应用于新概念穿梭艇的自航模试验中,试验表明所设计的自航模操控系统可以减小开发工作量,操作方便,可扩展性和可移植性强,能够反映新概念穿梭艇的操纵性能。最后经与船模拖曳水池试验结果进行对比,证明所设计系统应用于自航模试验时能够有效获取可靠数据。
关键词:穿梭艇;自航模;操控系统
0 引 言
近年来,高性能排水型船(如常规高速双体船、小水线面双体船、穿浪双体船、三体船、多体船、高性能排水型穿浪单体内倾船型等)逐渐成为新的研究方向。在高性能排水型穿浪单体内倾船型方面,美国和英国分别建造了DDG 1000“朱姆沃尔特”级驱逐舰和VSV“极细长艇”[1]。这些高性能船与传统排水型船相比,具有高速、高平稳性等优势。
本文所涉及的新概念穿梭艇就是针对恶劣航行条件下的高速船艇需求提出的具有内倾式船艏的排水型单体高速穿浪船[2],具有穿浪、高速等优点。魏成柱等[2-4]对该艇的船型特征进行了数值分析和试验研究。为了研究新概念穿梭艇的运动和操纵等性能,需要进行船模试验,包括拖曳试验和自航模试验。拖曳试验在拖曳试验水池进行,试验条件具有通用性;而对于自航模试验,需要人工搭建动力系统和操控系统,试验条件往往不具备通用性或可移植性。赵杨[1]设计了一套基于AVR单片机的自航操控系统,对目标船舶的单桨单舵系统进行控制,但是AVR单片机的接口数量较少,当船模需要添加多个传感器时,AVR单片机将很难胜任;苏威[5]介绍了上海交通大学自主研发的新型自航模系统,其能在试验水池中得到船舶的各种操纵性数据,而且具有非常高的精度,但该套系统没有在室外开阔自然水域进行试验验证;Shin等[6]使用一套自航系统对某船型进行试验并获取了船舶参数,系统具有很高的可靠性和精度,但由于采用了视觉定位技术,所用定位设备庞大,且需要220 V供电,而自然开阔水域往往不具备供电条件,设备搭建较为困难,因此在自然开阔水域的应用具有局限性;李成福[7]设计了以ATmega128单片机和复杂可编程逻辑器件(CPLD)为核心的下位机系统和由PC机构成的上位机系统,通过无线数据传输模块,实现上、下位机的串行通信从而实现对船模电机伺服控制和实验数据的采集,但ATmega128单片机接口数量少,扩展能力有限,在某种程度上限制了系统的可扩展性。蒲浩等[8]设计了一种基于Matlab软件的新概念潜浮平台自航操控系统,能够有效地进行自航试验,但是Matlab软件较为昂贵且对计算机的硬件要求较高;高雷等[9]设计了一套基于PLC的“可控船模研究系统”并成功应用于船舶操纵性试验。本文所针对的穿梭艇是一种新概念排水型单体高速穿浪船,具有细长、内倾式船艏、穿浪功能、横摇频率高[4]等特点。对该新概念船型的研究需要大量的航行状态数据,即需要给船模扩展多种不同的传感器,对自航系统的灵敏度和处理能力要求高,并且数据通信量大。同时,由于穿梭艇是一种新概念艇型,根据其实际航行效果,可能有必要对添加主动T型水翼、主动压浪板等辅助机构展开进一步的研究,要求自航系统留有足够的接口,方便扩展这些功能。针对新概念穿梭艇的特点,本文将为穿梭艇自航模研究和设计一套通用性和扩展性强的自航操控系统。系统将使用PC/ 104和ARM作为主控制器,其处理能力高且接口丰富,可扩展性强;使用开源的Python语言进行软件模块化开发,软件成本低、运行效率高。所设计的系统将能有效解决新概念穿梭艇的试验需求,且对于普通船舶和其他新型船舶,如小水线面双体船等的自航试验,该系统同样适用,具有一定的通用性和可移植性。
1 穿梭艇自航模操控系统设计
1.1自航模介绍
穿梭艇自航模缩尺比为1∶6,采用双桨双舵的动力系统,模型简图如图1所示,相关尺寸参数如表1所示。
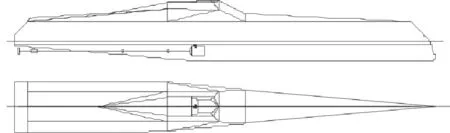
图1穿梭艇自航模示意图Fig.1 Shuttle vessel free-running model
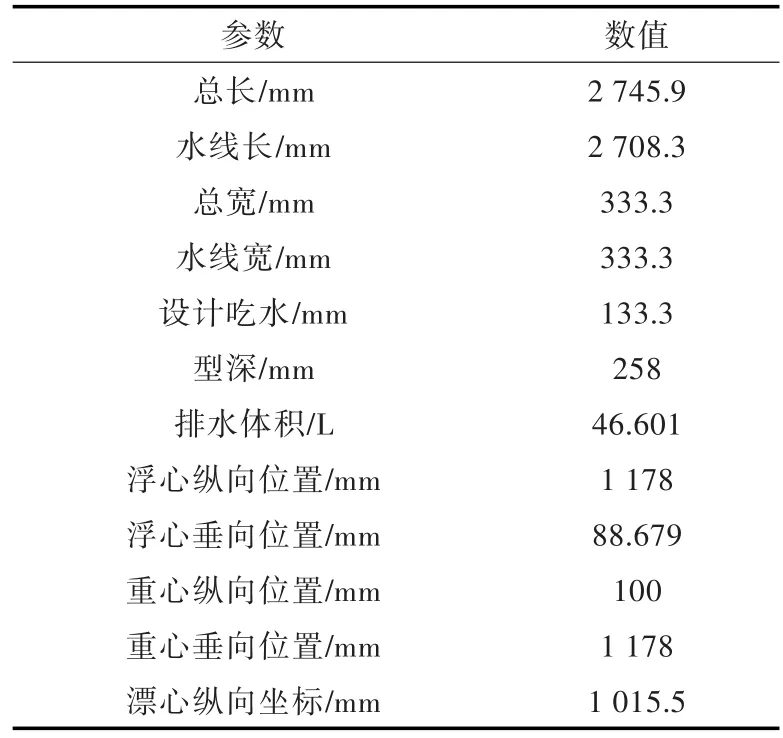
表1穿梭艇自航模参数Tab.1 Parameters of the shuttle vessel model
穿梭艇自航模要求所设计的操控系统能够实现手动操控与自动控制,同时要能实时完成数据的采集和存储。其中,手动操控要能实现穿梭艇自航模加减速航行、转向、倒车动作,自动控制要求能够实现Z形操纵、航向自动保持等。
1.2系统硬件设计
本文所设计的自航模操控系统采用基于网络通信的上、下位机体系,由以下几部分组成。
1)核心控制单元。
核心控制单元包括上位机和下位机。上位机用于监测自航模航行状态、发送操控指令。下位机安装在自航模内,用于执行控制命令、采集数据。系统上位机使用普通便携式个人电脑。考虑到船模尺度以及系统的扩展性,下位机使用研华公司的PCM-3362型PC/104 CPU模块,同时搭载PCM-3644型PC/104串行接口扩展板、PCM-3910 型PC/104电源板。上位机和下位机均使用Windows XP操作系统。
2)无线通讯系统。
操控系统通过Windows XP的远程桌面功能,实现上位机对下位机的远程操控。选用TP-LINK公司的TL-WR742N无线路由器建立无线局域网,能够覆盖半径200 m左右的水面。上位机和下位机都配备无线网卡,通过建立的局域网,可实现上、下位机的远程操控。
3)底层驱动系统。
底层驱动系统包括底层驱动器和执行器。
底层驱动器使用STM32核心板,该核心板采用ARM Cortex-M3系列嵌入式微处理器。
执行器包括推进系统和转舵系统。自航船模一般选用直流电机、步进电机、舵机作为其执行器,新概念穿梭艇的推进系统选用2个直流无刷霍尔电机,额定电压24 V,额定转速3 000 r/min,额定功率180 W。配套螺旋桨外径50 mm,双桨外旋。使用ZM-6508直流无刷霍尔驱动器驱动2个直流无刷霍尔电机,驱动器读取电机霍尔信号,实现转速闭环控制。转舵系统使用Tower Pro公司的MG995型大扭力伺服舵机控制垂直舵转动。
下位机通过RS232串行通信接口发送指令至STM32核心板,STM32核心板产生脉宽调制(PWM)信号并将其发送至ZM-6508驱动器和舵机,实现电机调速和舵角控制。对于不同的船舶自航模,如果其执行器能够通过PWM方式调节,该底层驱动系统仍然适用,则可方便移植到不同的船舶自航模中进行试验。
4)数据采集系统。
数据采集系统由各种传感器组成,其功能为采集自航模航行信息和执行机构信息,包括航速、自航模姿态、加速度、角速度、位置、舵角、螺旋桨转速等信息。所选传感器如表2所示,它们具有通用性,可在其他类型船舶自航模上使用。

表2传感器型号Tab.2 Type of sensors
其中,GNSS RTK差分系统包括DGPS基站和DGPS移动站,使用时基站固定在岸边开阔位置,移动站安装在自航模上合适的位置,可以测量自航模经纬度、航向角和航速数据。AHRS5110M惯性导航系统可测量自航模三轴角度、三轴加速度和三轴角速度;E6B2-CWZ1X旋转编码器能够测量舵角角度和螺旋桨转速;DGPS系统、惯性导航系统通过串行接口通信方式将数据实时发送给PC/104下位机;STM32核心板读取旋转编码器数据,并通过串行接口将编码器数据发送给PC/104下位机。
5)通讯保护系统。
由于局域网覆盖面积及信号强度有限,为防止因网络通讯中断导致自航模失控的情况发生,设计了一套通讯保护系统,如图2所示。使用继电器实现对STM32核心板电源的通断。当上位机程序启动时,继电器闭合,STM32核心板通电;当网络通讯中断时间达到3 s时,下位机的通用输入输出(GPIO)接口驱动继电器切断STM32核心板电源,底层驱动信号消失,所有执行机构就会停止动作,直到网络畅通并收到控制指令后再进行下一次动作,可避免因通信中断导致的意外发生。
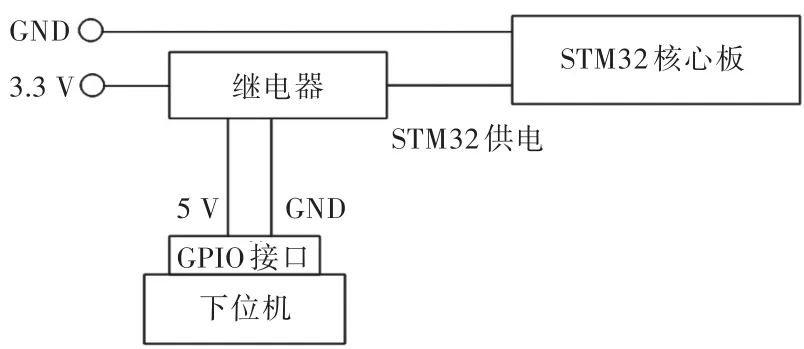
图2通讯保护系统Fig.2 Protection system for communication
6)供电系统。
穿梭艇自航模供电电压为24,12和5 V。使用2块并联24 V(10 A·h)锂电池作为总电源,使用24 V转12 V变压器提供12 V电压。其中:2个直流电机使用24 V电源供电;惯性导航系统、DGPS移动站使用12 V电压供电。下位机PC/104电源模块使用24 V电源供电,该电源模块能够输出+5 V电源,为STM32核心板、旋转编码器供电。各个硬件与电源之间通过插拔式接线端子连接。穿梭艇自航模操控系统硬件搭建结构如图3所示。
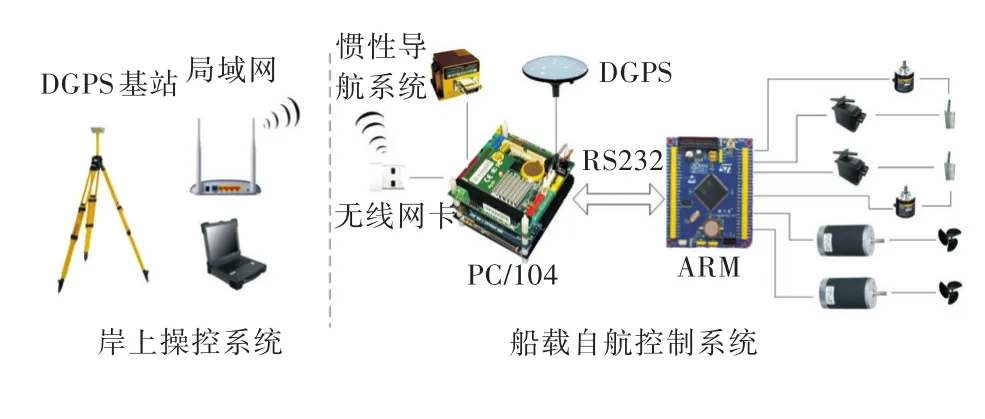
图3穿梭艇自航模操控系统硬件搭建结构图Fig.3 Hardware structure of the shuttle vessel manipulation and control system
大部分船舶的自航模都选用步进电机、直流电机和舵机作为其执行机构,不过在型号和数量上会有所不同,比如有些自航模会选用步进电机作为执行机构的动力、配备单桨单舵或全回转桨等;船舶自航模在进行试验时,需要测得航行姿态、航速及位置等信息。新概念穿梭艇自航操控系统的底层驱动系统所选用的ARM Cortex-M3系列嵌入式微处理器最多可以同时产生30路PWM信号,具有至少16路A/D转换通道、5个通用异步收发器(UART)通道,而步进电机、直流电机和舵机均可以采用PWM方式进行控制;穿梭艇自航系统所选用的姿态、位置、航速等传感器可直接用在不同的船舶自航模上,具有通用性。这就使得穿梭艇自航操控系统可模块化移植到具有一定数量的直流电机、舵机、步进电机的船舶自航模上,具有良好的通用性和可移植性,减少了不同船舶自航模自航系统的开发工作量。
1.3系统软件设计
控制系统软件采用开源编程语言Python进行编写,可在主流操作系统(如Windows,Linux等操作系统)上免费使用,使得操控系统的软件通用性提高,且能够降低开发成本。同时,Python语言具有丰富的功能扩展模块,开发方便、快捷,能够减小软件制作工作量,加速软件开发进度,节省操控系统开发时间。
1)执行机构控制程序。
执行机构包括螺旋桨和垂直舵。STM32核心板的PWM通道产生脉宽调制信号、GPIO通道产生脉冲信号,发送给电机驱动器,实现螺旋桨的运动控制。STM32产生频率为50 Hz的PWM数字信号驱动舵机,实现垂直舵的控制。使用C语言编写STM32驱动程序,具体编程方法详见文献[10]。
STM32核心板使用RS232协议与下位机通信。所设计的通信协议如图4所示。
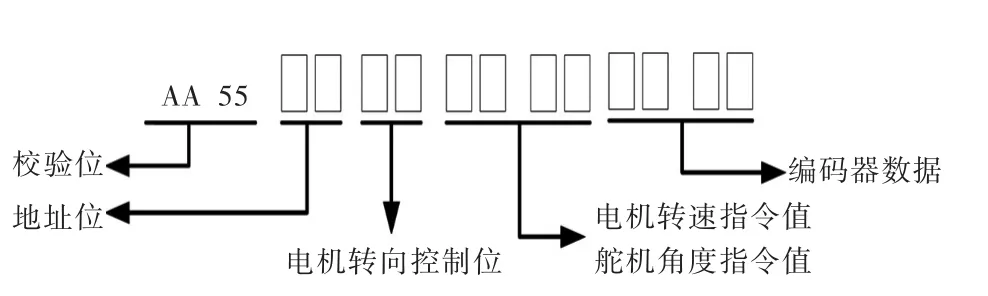
图4 STM32与下位机之间的通信协议Fig.4 Communication protocol between the lower computer and STM32
当上位机通过远程桌面操控下位机PC/104工控机发送控制指令、下位机接收和发送数据时,都需按照图4所示的通信协议对控制指令进行封装,STM32核心板根据收到的指令进行解码,实现电机调速、舵机转角等相应的功能。
2)数据采集软件设计。
穿梭艇自航试验过程中需要采集的数据有:执行机构动作数据,包括电机转速指令数据、舵角指令数据、电机转速实时数据、舵角实时数据;航行状态数据,包括穿梭艇三轴角度、角速度、加速度、穿梭艇航速、绝对经纬度坐标值。进行软件设计时,根据传感器的数据协议,使用Python语言的串行接口读取模块进行编写,读取挂载在PC/104串行接口上各传感器的数据;使用C语言编写脉冲采集程序并在STM32核心板上运行,用以读取旋转编码器数据。读取的所有数据发送至PC/104操控软件中,在同一频率下,以.txt格式文件的形式实时保存至PC/104硬盘中,供后期处理使用。
3)操控界面设计。
穿梭艇自航操控系统具有的功能包括设备初始化、开环操控、自航闭环控制、实时数据显示、急停及倒车等操作。自航模操控软件程序流程简图如图5所示。采用Python语言的Tkinter模块[11]编写操控界面。新概念穿梭艇自航操控系统软件界面分为航行状态区、开环控制区和闭环控制区3个部分,其中航行状态区用以显示自航模航行姿态、航速信息、位置信息、螺旋桨转速信息等,开环控制区设置加减速指令按钮、左右舵指令按钮等功能,闭环控制区设置Z形操纵指令按钮、正弦操控指令按钮,如图6所示。
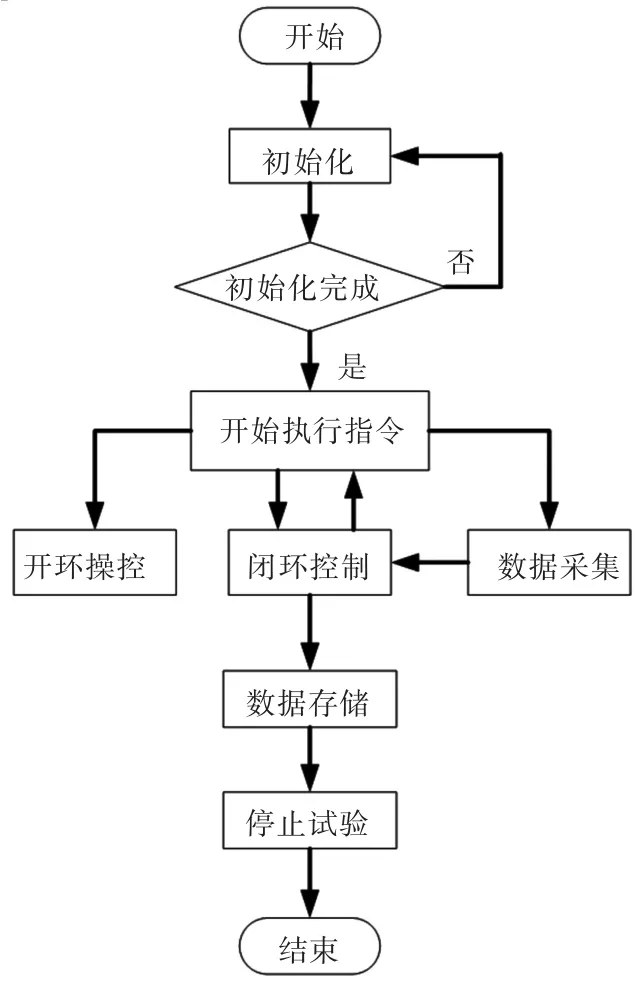
图5自航模操控软件程序流程简图Fig.5 Flow chart of the free-running model's manipulation and control software

图6自航模操控软件界面Fig.6 Software interface of the free-running model's manipulation and control system
1.4软、硬件性能分析
对新概念穿梭艇的研究,需要采集大量的航行状态数据,数据通信量大;试验过程中有必要添加多种不同的传感器,对自航系统的灵敏度和处理能力要求高;根据其实际航行效果,有可能需要对添加主动T型水翼、主动压浪板等辅助机构展开进一步的研究,这就要求自航系统留有足够的接口,方便扩展这些功能。表3和表4所示为该自航操控系统的硬件和软件性能。
由表3可以看出,自航硬件控制系统性能良好,且具有丰富的接口,数据处理能力和可扩展性强;由表4可以看出,软件开发效率、执行效率高,能够满足新概念穿梭艇试验需求。
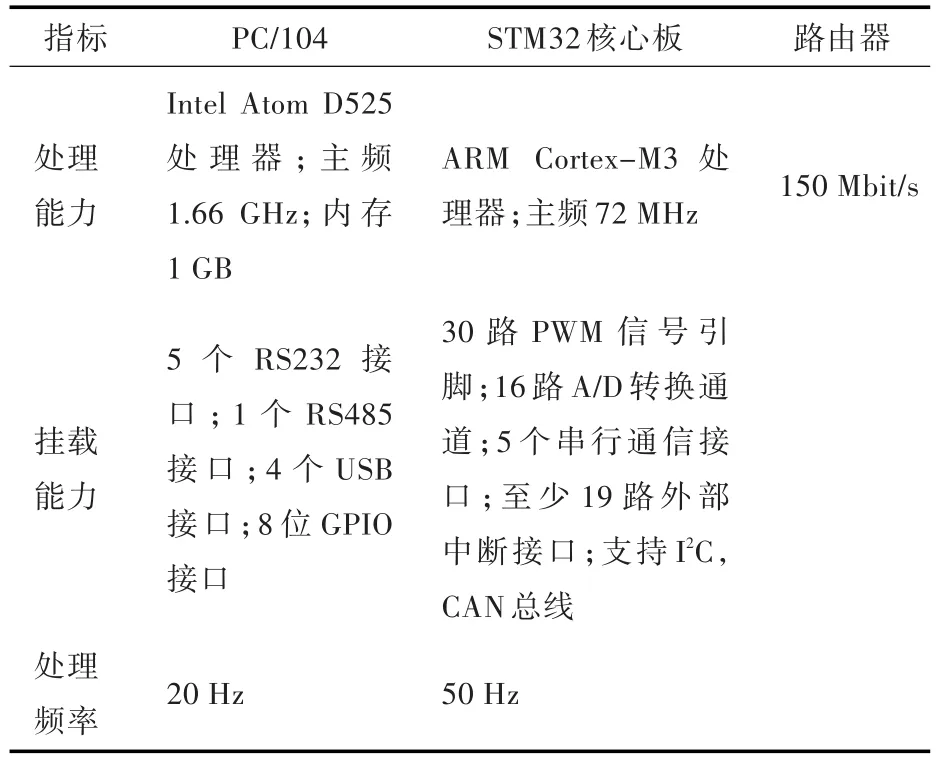
表3硬件性能Tab.3 Hardware performance
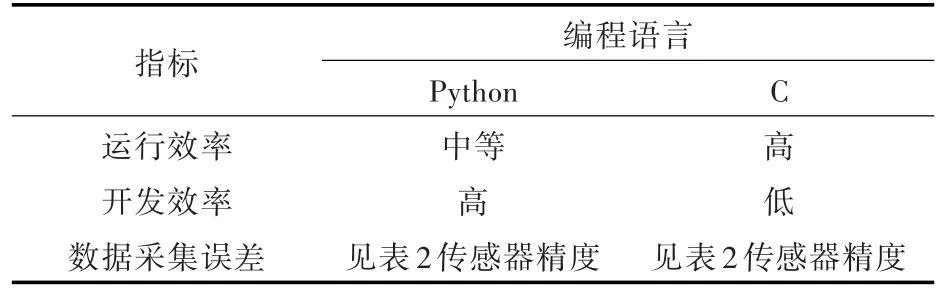
表4软件性能Tab.4 Software performance
2 自航试验
自航模操纵性试验通常在露天水池、天然湖泊或室内操纵性水池中进行[12]。穿梭艇自航模操控系统硬件、软件开发完成后,以模块化的形式搭建在穿梭艇自航模上,在上海交通大学闵行校区的涵泽湖进行试验,水域长160 m,宽78 m,湖底平整,水深5 m,微弱风。通过试验验证操控系统软、硬件设计的有效性。图7所示为正在进行试验的自航模。因螺线试验和逆螺线试验可以评价船舶的运动稳定性和回转稳定性[13],同时也是对操控系统稳定性的有力考验,故本研究使用螺线试验和逆螺线试验方法对穿梭艇自航模的运动特点进行分析,同时验证操控系统的可行性。

图7穿梭艇自航模试验Fig.7 Experiment of the shuttle vessel free-running model
试验开始前,先将穿梭艇自航模放入水中,使其处于自由静止状态,读取传感器初始数据。然后将螺旋桨转速逐渐加速至900 r/min,当DGPS测得船模航速达到稳定时(试验测得在螺旋桨转速900 r/min下船模直线稳定航速为1.3 m/s),下达螺线试验指令,舵角按照30°→20°→10°→0°→-10°→-20°→-30°→-20°→-10°→0°→10°→20°→30°依次变化以使穿梭艇回转运动,每回转一周更换一次舵角,进行3组试验。选取其中一组试验数据,从中选取经纬度数据导入谷歌地球,显示出的穿梭艇运动轨迹卫星图如图8所示;选取舵角、横倾角、艏向角速率绘制曲线,如图9所示。

图8螺线试验轨迹卫星图Fig.8 Satellite image of spiral test
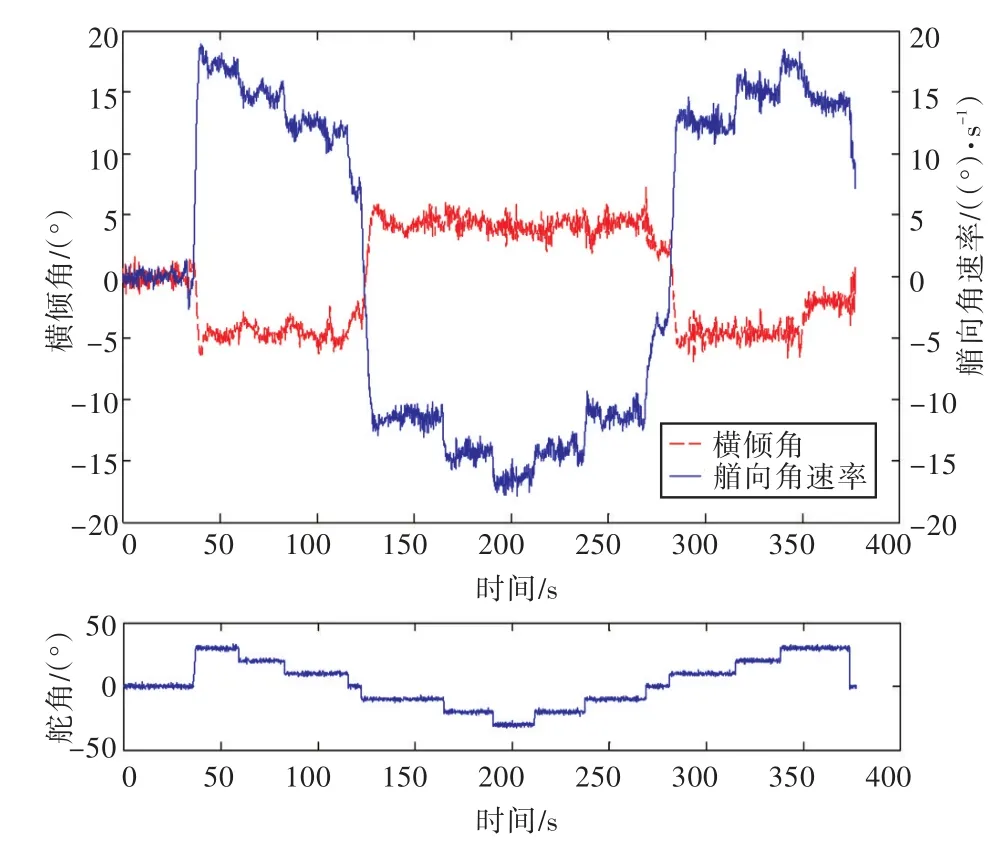
图9螺线试验数据曲线Fig.9 Curve of the spiral test
分析图9的试验数据可知,在初始阶段,穿梭艇直线航行,艏向角速率和横倾角都为0,舵处于零位。当t=40 s时下达螺线试验指令。在同一航速下,不同舵角将引起船舶航行回转半径的不同,艏向角变化率也将不同。从图9可以看出,穿梭艇舵角从30°逐渐变小时,艏向角速率逐渐变小,而横倾角的变化则很小;且自航系统能够连续稳定工作较长时间,系统能有效工作,可靠运行。根据IMO操纵性标准[13],从试验数据分析看出,穿梭艇具有良好的动稳定性和回转稳定性,自航操控系统能够连续稳定工作。此外,可以利用该系统进行Z形操舵试验和制动试验等,获取的数据可用来分析和衡量船舶的回转能力、制动能力及偏转抑制性能等,也可通过参数辨识等方法,获取船舶操纵性K,T参数及船舶运动模型参数等。
为进一步验证穿梭艇自航操控系统的有效性,对穿梭艇船模不同航速下的姿态数据进行采集,并将自航操控系统测得的数据同穿梭艇船模拖曳水池试验(图10)数据进行对比。表5所示为二者的对比数据。

图10穿梭艇船模拖曳水池试验Fig.10 Towing experiment data of the shuttle vessel model
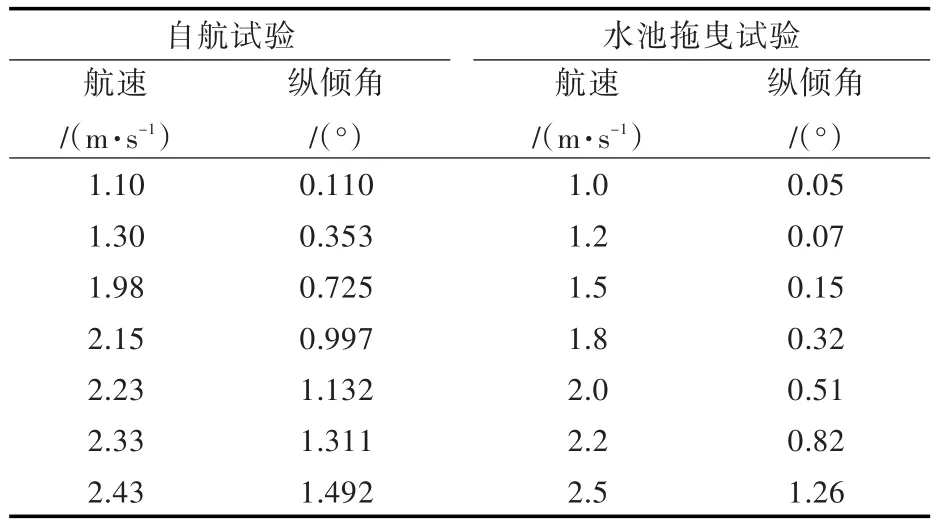
表5自航试验与拖曳试验数据的对比Tab.5 Comparison of experimental data between the free-running model and the towing one
绘制纵倾角随航速变化的曲线,如图11所示。由于试验条件所限,无法得到平静的水面和无风的环境,同时自航操控系统所使用的惯性导航系统性能较差,有小角度的随机漂移。在低速段,由于穿梭艇自航模倾角较小,这些外界随机因素干扰占比较大,导致与水池试验的偏差较大。可以看到,在高速段,偏差占比逐步缩小,穿梭艇自航模纵倾角与拖曳水池试验结果趋势基本一致。可以看出,自航操控系统是有效的。后续在经费和条件允许的情况下,会尝试安装精度更高的惯性导航系统,同时在室内大型泳池等干扰小的环境下重复该试验,以期得到更准确的结果。
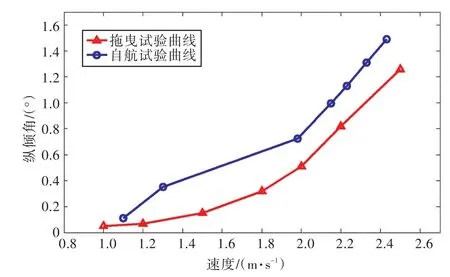
图11纵倾角随航速变化曲线Fig.11 Variation of pitch angle with respect to speed
从上述试验结果可以看出,所设计的自航操控系统有效、可靠,且性能良好,能够在一定程度上反映新概念穿梭艇的运动效果和操纵性能。
3 结 语
本文针对新概念穿梭艇自航模的自航试验需求,设计和开发了完整的自航操控系统。自航操控系统采用远程操控实现上、下位机之间的控制体系功能,使用Python开源语言进行软件的编写。使用的STM32核心板和PC/104下位机主板均具有丰富的接口,使得操控系统具有较好的扩展性,如添加传感器、执行机构及更丰富的闭环控制算法等;同时,所设计的操控系统采用模块化设计,能够方便地移植到具有类似执行机构的海洋运载器上,具有较好的可移植性。利用穿梭艇船模拖曳水池试验数据,验证了自航操控系统的有效性以及穿梭艇自航系统总体设计的可行性。需要指出的是,本文只利用自航操控系统对穿梭艇的航速和姿态进行了验证,其他方面的功能还有待后期在自航操控系统的使用过程中进一步优化和验证。
参考文献:
[1]赵杨.船舶适航性与操纵性自航模系统设计[D].哈尔滨:哈尔滨工程大学,2010.
[2]魏成柱,李英辉,易宏.基于CAD与CFD的穿梭艇局部船型特征分析[J].船舶工程,2014,36(3):28-32. WEI Chengzhu,LI Yinghui,YI Hong. Analysis of shuttle vessel's local hull form characteristics based on CAD and CFD[J]. Ship Engineering,2014,36(3):28-32.
[3]刘怡锦.基于势流理论的穿梭船型性能特征研究[D].上海:上海交通大学,2013.
[4]魏成柱.穿梭艇性能特征与船型优化[D].上海:上海交通大学,2013.
[5]苏威. VLCC波浪中操纵性数值预报与自航模试验研究[D].上海:上海交通大学,2012.
[6]SHIN H,PARK H S,YANG C S,et al. Motion analy⁃sis by free-running model test[C]// The Twelfth Inter⁃national Offshore and Polar Engineering Conference. Kitakyushu,Japan:International Society of Offshore and Polar Engineers,2002.
[7]李成福.自航船模控制系统研究[D].哈尔滨:哈尔滨工程大学,2008.
[8]蒲浩,冯正平,易宏.新概念潜浮平台自航模操控系统设计[J].上海交通大学学报,2010,44(9):1312-1316. PU Hao,FENG Zhengping,YI Hong. Control system design for self-propelled model of a new concept sub⁃merging and surfacing platform[J]. Journal of Shang⁃hai Jiaotong University,2010,44(9):1312-1316.
[9]高雷,李密,叶刘刚. ARMS在船舶操纵性试验中的应用[J].船舶工程,2008,30(6):4-6,10. GAO Lei,LI Mi,YE Liugang. ARMS for the free run⁃ning model test on the ship maneuverability[J]. Ship Engineering,2008,30(6):4-6,10.
[10]张洋,刘军,严汉宇.原子教你玩STM32[M].北京:北京航空航天大学出版社,2013.
[11]GRAYSON J E. Python and Tkinter programming [M]. Greenwich:Manning,2000.
[12]盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2004.
[13]International Maritime Organization. IMO standards for ship manoeuvrability[S/OL].[2015-08-01]. http: //www. crs. hr/ portals/ 0/ docs/ eng/ imo_iacs_ed/ imo/ msc_reports/MSC76-23-Add-1. pdf.
Experimental study on the control system for the free-running model test of a new concept shuttle vessel
WANG Jian,LIU Jingyang,WEI Chengzhu,LI Yinghui,YI Hong
State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200240,China
Abstract:The free-running model test is an effective way to evaluate ship performance. In this paper, a Manipulation and Control (MC) system is designed for a new concept shuttle vessel. The MC system in⁃cludes two parts: an ashore control system and an onboard control system, and the two parts exchange infor⁃mation through a Wireless Local Area Network (WLAN). The actuators of the shuttle vessel are equipped with sensors to obtain the feedback data, and certain sophisticated programmable elements are incorporated as the drivers of the actuators, where the lower and upper computer software are both written in the Python programming language. The MC system is then successfully applied to the free-running model test of the new concept shuttle vessel. Experimental results indicate that the MC system is efficient in terms of the de⁃velopment effort, easy to be operated, and has good scalability and portability. The maneuverability of the new concept shuttle vessel is well demonstrated through the free-running model test results. Finally, the free-running experiment results tested with the MC system is compared with the actual towing tank data, which shows high consistency.
Key words:shuttle vessel;free-running model;control system
作者简介:王健,男,1989年生,博士生。研究方向:海洋运载器运动控制。E-mail:nsms_sjtu@sjtu.edu.cn刘旌扬(通信作者),男,1982年生,博士,讲师。研究方向:海洋运载器智能控制。E-mail:jy_liu@sjtu.edu.cn易宏,男,1963年生,教授,博士生导师。研究方向:潜水器与特种船舶开发研究,海上装备与系统,系统可靠性与人因工程研究。E-mail:yihong@sjtu.edu.cn
基金项目:上海交通大学海洋工程国家重点实验室自主研究课题(GKZD010061)
收稿日期:2015 - 08 - 08网络出版时间:2016-1-19 14:55
中图分类号:U661.73
文献标志码:A
DOI:10.3969/j.issn.1673-3185.2016.01.012
网络出版地址:http://www.cnki.net/kcms/detail/42.1755.TJ.20160119.1455.026.html期刊网址:www.ship-research.com
引用格式:王健,刘旌扬,魏成柱,等.新概念穿梭艇自航模操控系统试验研究[J].中国舰船研究,2016,11(1):95-101. WANG Jian,LIU Jingyang,WEI Chengzhu,et al. Experimental study on the control system for the free-running model test of a new concept shuttle vesse[lJ]. Chinese Journal of Ship Research,2016,11(1):95-101.
