RTK三维多波束水深测量在港珠澳大桥岛隧工程中的应用
2016-04-17 09:05潘满,何波
中国港湾建设 2016年7期
潘 满,何 波
RTK三维多波束水深测量在港珠澳大桥岛隧工程中的应用
潘 满,何 波
(中交广州航道局有限公司,广东广州510221)
在港珠澳大桥岛隧工程的深基槽开挖和回淤监测过程中,水深测量精度要求越来越高,常规验潮多波束测量已经无法满足测量精度。文中介绍了RTK三维多波束水深测量系统的组成及测量的基本原理,并以实例分析了RTK三维多波束水深测量的优势,可为深海基槽水深测量提供参考。
深基槽;回淤监测;RTK三维多波束水深测量
1 工程概况
港珠澳大桥岛隧工程地处伶仃洋,施工环境复杂,涨落潮水流急,基槽最终成槽断面非常复杂,横断面设置多种复合边坡(包括1∶2.5和1∶5两级边坡),基槽纵向底部呈W形,设置多个缓坡组合,同时基槽开挖最深深度为47.22m,边坡最浅水深为10m,水深变化大,验收标准高,水深测量关系重大[1]。
岛隧工程的主要工序有基槽粗挖、精挖、清淤、抛石夯平、碎石整平等,各工序质量验收标准要求高,对施工过程中多波束水深检测及监测精度提出较高要求,常规的水深测量模式已不能满足要求。为了提高水深数据的质量和实效性,必须改进传统的测量模式,采用RTK三维水下多波束测量,为工程施工和科学决策提供数据支撑[2]。
2 多波束测深系统的组成
多波束测深系统由多波束探头及控制盒、运动传感器、RTK-GPS接收机、声速剖面仪(包括表面声速仪)、采集电脑、外业采集软件及数据处理软件组成。
2.1 多波束测深仪
采用Sonic 2024多波束测深仪,基于第5代声呐结构开发,波束角为0.5º×1º(垂直航线×沿航线),分辨率高,可以发现水下极小物体,由换能器和SIM控制盒组成。换能器安装在测量船测量井中,可以全自动垂直升降,使用方便,比旁挂式安装更便捷,同时比直接安装在船底安全。接收换能器内嵌入了处理器和控制器,用数据电缆同SIM控制盒完成数据通讯。SIM盒为声呐头提供电源,为连接在其上的其他传感器提供时间标准,传递命令给声呐头和将原始多波束数据发送到数据采集计算机。控制Sonic 2024操作的声呐控制图形用户界面(GUI)是一个绿色软件,可以运行在任何Windows计算机上。Sonic Control控制软件通过以太网与声呐接口单元(SIM)通讯[3]。
通过Sonic Control控制软件,用户可以在200~400 kHz范围内实时选择Sonic 2024工作频率,不需要停机,甚至不需要停止数据记录,就可修改频率。用户还可以选择Sonic 2024的条带覆盖宽度,范围为10º~160º,而波束个数一直保持为256个,改变时也不需要停机或停止数据记录。整个条带扇区还可以实时旋转,以适合特殊测量如码头壁测量的需要。改变条带覆盖宽度和旋转扇区指向的操作都可以通过拖动鼠标实现。
2.2 运动传感器
采用Octans运动传感器,集罗经、运动传感器于一体,可以提供载体真方位角、纵横摇角度、升沉量等有关信息,是当今世界上唯一采用光纤陀螺技术、能同时提供真北方位和运动姿态的固态罗经运动传感器。
运动传感器为系统提供船舶的姿态数据,包括横摇值(Roll)、纵摇值(Pitch)、升沉值(Heave),以便修正因船舶运动引起的水深值变化。
2.3 RTK-GPS
RTK-GPS提供三维定位信息和时间信息,计算多波束脚印在隧道坐标系(TCS坐标系)中的坐标和计算潮位,同时还输出1PPS时间脉冲,实时同步水深数据和其他传感器(GPS、运动传感器)数据时间,消除时间偏差,这也是提高多波束测量精度的重要措施。
为了提高RTK的精度,确保电台信号覆盖整个基槽区域,项目部在基槽西岛附近、中间及东岛附近建了3个RTK单基站参考站,在实际测量时根据测量范围选择RTK参考站,提高定位精度,提供了WGS 84坐标到TCS2010坐标系的7参数转换参数,其中拟合了高程转换,在平面坐标转换时同时实现了基于WGS 84高程向基于1985国家高程基准的高程转换。
2.4 声速剖面仪
采用声速剖面仪采集声波在海水中的传播速度,以便在内外业进行声速改正,求得正确的水深值。港珠澳大桥隧道基槽处于伶仃洋,水文条件复杂,每天多次涨落潮,声速变化大,必须在测前、测后各测1次声速剖面,同时使用表面声速仪实时提供探头处声速。表面声速对于Sonic 2024这类平板型的接收换能器至关重要,一定要输入正确的表面声速值。如果输入值与真值偏差较大,将会造成测深结果失真,而且对于这种失真,在任何后处理中都无法改正。
2.5 Qinsy采集软件
Qinsy软件是由模块化程序组成,集成了外业采集软件和内业处理软件,采用项目模式以便操作,所有程序都需从控制台启动,主要由Setup、Online、Replay和Processing组成,Qinsy软件控制台界面如图1所示。

图1 Qinsy软件控制台界面Fig.1 Disp lay ofQ insy console
Setup模块主要是添加和配置各种传感器参数,包括GPS-RTK的驱动和安装位置、多波束的驱动及安装角度偏差、罗经的驱动、运动传感器的驱动和安装位置,其中TestGeodetic Parameter模块可以测试转换参数是否正确,保证外业采集数据的准确性;Online模块功能主要是外业测量采集,利用Setup里设置好的模板文件进行采集数据,包括导入背景和测线、导入声速、设置是否采用RTK测量潮位以及数据记录格式;Replay模块主要功能是对记录的原始数据进行回放,以便对外业设置出现错误时(如GPS位置设置错误)采集的原始数据进行改正;Processing模块主要功能是内业数据处理,包括声速和潮位改正、建立3D图、自动和手动滤波、数据输出等。
3 RTK三维水下多波束测量的原理
3.1 基本原理
常规的多波束测量需要人工验潮,即在测量区域设立验潮站,测后获得潮位数据进行潮位改正,而RTK三维水下多波束测量在利用RTK获得平面定位数据的同时利用高程数据实时求得潮位,在内业数据处理时利用RTK潮位进行改正[4],从而不需要建立潮位站进行验潮,其原理见图2。
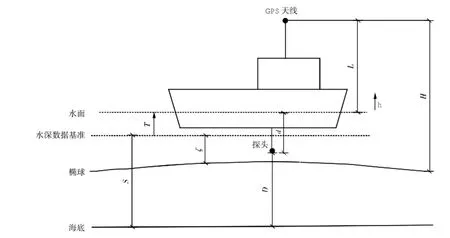
图2 RTK三维多波束水深测量原理Fig.2 PrincipleofRTK three-dimensionalmulti-beaMbathymetry
船舶在水面测量时,H为GPS所测大地高,L为RTK天线到水面的高度,d为换能器到水面的距离(吃水),h为运动传感器所测船舶升沉值,T为RTK潮位,D为多波束所测水深,ζ为1985国家高程基准面到WGS84椭球面的距离(高程异常),S为1985国家高程基面下水深。
由图2可以得到以下关系式:

其中H-ζ=H85高程,由式(2)转换得到:

此时,D为多波束实时测得水深,L+d为RTK天线到探头底部距离,为固定值,若可以实时采集到85高程,便可以实现RTK三维多波束测量。
一般有两种方式采集到85高程:一为外业采集软件(如EIVA)在利用7参数对RTK-GPS采集的WGS 84坐标进行转换时,只实时转换求得了当地坐标系下的平面坐标,而高程依旧是基于WGS 84椭球的大地高,要求得85高程,仍需求得两者之间的高程异常,即ζ,这种情况下可以把隧道基槽东西分为若干段,分别求得每个区域的高程异常值,然后在内业时改正;二为Qinsy外业采集软件在利用7参数对RTK-GPS采集的WGS 84坐标进行转换时,可以实时转换得到当地坐标系下的三维坐标,包括隧道坐标系下的平面坐标和基于1985国家高程基准面的高程,这样便可以利用式(3)实现RTK三维多波束水深测量。很明显,第二种方法更简便和准确,本文采取第二种方法。
3.2 优势比较
常规多波束水深测量只能采取人工验潮的手段,必须在测前手动测量探头的吃水,由于海面总是在上下起伏,所以测量总是会有偏差,同时需在测区附近设立验潮站。岛隧项目中,在靠近西岛的测量平台上安装了潮位遥报仪,测量中利用接收端接收遥报仪数据以便内业进行改正,这样既增添了测量成本,同时测量精度无法保证。由于测量平台到海面距离高,约7 m,同时由于海面的起伏,导致在测量波峰和波谷时信号有延迟,测量潮位时存在误差,从而使多波束水深测量结果产生一定的偏差。而RTK三维多波束测量系统利用RTK所测的潮位,只需量得GPS天线底座到探头底部的距离即可,不用每日测量吃水,减少了测量误差,同时随船舶上下起伏,可以实时测得潮位,减少了测量波峰波谷导致的误差,消除了船舶在顺水和顶水测量时动吃水变化带来的误差,结合多波束水深数据和运动传感器数据,就可以实现高精度RTK三维多波束水深测量。
4 实例分析
为了分析常规多波束水深测量和RTK三维多波束水深测量的数据稳定性,2015年6月6日和7日在基槽E20—E21管节采用两种测量模式进行水深测量,见表1。
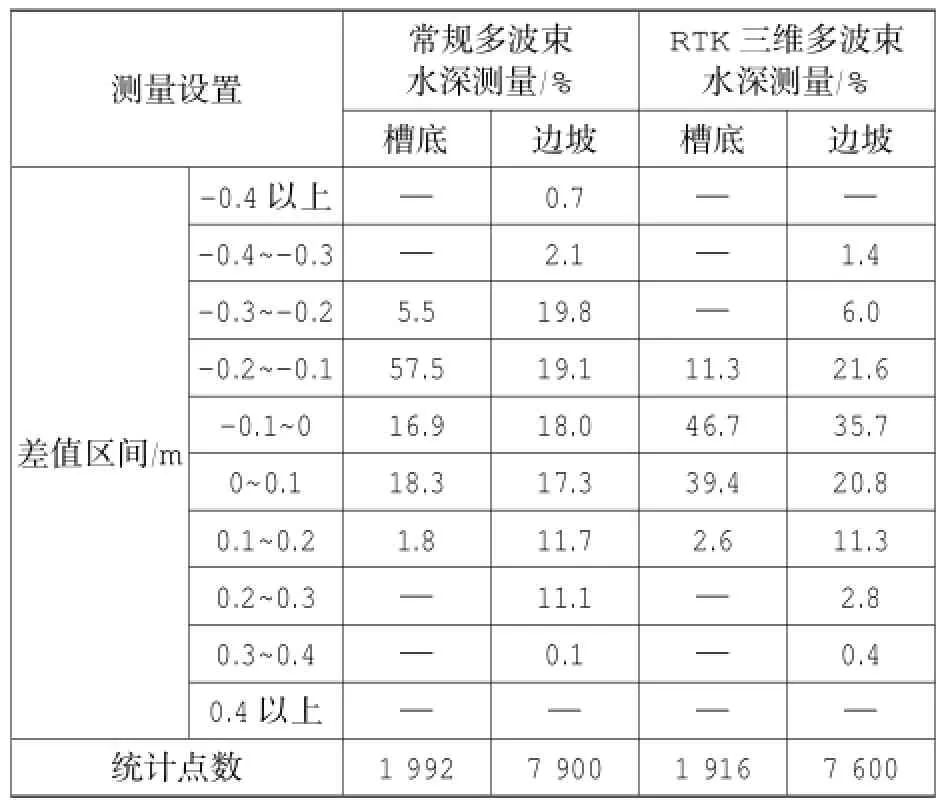
表1 常规多波束测量和RTK三维多波束测量2 d差值数据比较Table1 Comparison of 2 daysdata of conventional tide Multi-beaMbathymetry w ith that of RTK three-dimensionalmulti-beaMbathymetry
两种测量模式的设置都一样,唯一不同的是前者采用潮位遥报仪的潮位,而后者采用RTK的潮位。在对数据进行处理后,在Hypack软件里分别对两种测量模式的前后2 d数据做差值,然后分析数据的稳定性。
从表1可得,槽底区域6月6日和7日差值分布情况如下:采用RTK三维多波束测量的差值86%分布在-0.1~0.1 m,而采用常规多波束测量的差值只有35.2%分布在-0.1~0.1 m,57.5%分布在-0.2~-0.1m;边坡差值情况为:采用RTK三维多波束测量的差值89.5%分布在-0.2~0.2 m,而采用常规多波束测量的差值只有66.1%分布在-0.2~0.2m。明显可以看出采用常规多波束测量的数据稳定性较采用RTK三维多波束测量数据差。
5 结语
本文介绍了RTK三维多波束测量系统的组成及基本原理,同时比较分析了RTK三维多波束测量和常规验潮多波束测量的优势,并以港珠澳大桥岛隧工程E20—E21管节实测水深数据为例进行具体分析,使RTK三维多波束水深测量可以在深水基槽测量中得到更好地推广应用。
[1]郑伟,李炜.GPS-RTK三维水下地形测量的应用与误差分析[J].中国港湾建设,2015,35(7):42-45.
ZHENGWei,LIWei.Application and erroranalysisof GPS-RTK three-dimensional underwater topographic survey[J].China Harbour Engineering,2015,35(7):42-45.
[2]孙阳阳,徐良,张建军,等.基于多波束测深的海底基床监测与分析[J].中国港湾建设,2015,35(11):46-48.
SUN Yang-yang,XU Liang,ZHANG Jian-jun,et al.Monitoring and analysisof seafloor subgrade usingmulti-beaMbathymetry[J]. ChinaHarbour Engineering,2015,35(11):46-48.
[3]赵建虎,刘经南.多波束测深及图像数据处理[M].武汉:武汉大学出版社,2008.
ZHAO Jian-hu,LIU Jing-nan.MultibeaMbathymetric and image data processing[M].Wuhan:Wuhan University Press,2008.
[4]JT/T 790—2010,多波束测深系统测量技术要求[S].
JT/T790—2010,Technical requirement formultibeaMechosounder systeMsurveying[S].
App lication of RTK three-diMensionalmulti-beaMbathymetry for island and tunnel project of Hongkong-Zhuhai-Macao Bridge
PANMan,HEBo
(CCCCGuangzhou Dredging Co.,Ltd.,Guangzhou,Guangdong 510221,China)
During the excavation and siltationmonitoring of the deepwater foundation trench for the island and tunnel project of Hongkong-Zhuhai-Macao Bridge,bathymetric survey demandshigherand higher accuracy and the conventional tidemultibeaMbathymetry isunable tomeet the accuracy demand.The set up and principle of the RTK three-dimensionalmulti-beaMbathymetry are described in the paper and the advantage of RTK three-dimensionalmulti-beaMbathymetry is analyzed based on an examp le,whichmay provide reference for bathymetric survey of deepwater foundation trenches.
deepwater foundation trench;siltationmonitoring;RTK three-dimensionalmulti-beaMbathymetry
U652.4
A
2095-7874(2016)07-0005-04
10.7640/zggw js201607002
2016-05-23
潘满(1988—),男,湖北荆门人,助理工程师,测绘工程专业。E-mail:302566092@qq.com
猜你喜欢
长江科学院院报(2022年10期)2022-10-27
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07
港工技术(2022年2期)2022-05-12
河北地质(2021年1期)2021-07-21
中国港湾建设(2020年9期)2020-09-10
海岸工程(2020年1期)2020-04-25
价值工程(2018年10期)2018-04-04
科技视界(2017年4期)2017-05-22
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
中国港湾建设(2016年1期)2016-09-06