海洋油气开发水下防喷器紧急备用控制系统研究
2016-04-12 09:08耿艳东王卫华吴国辉侯国庆
石油矿场机械 2016年2期
耿艳东,王 莎,王卫华,吴国辉,侯国庆
(河北华北石油荣盛机械制造有限公司,河北 任丘 062552)①
海洋油气开发水下防喷器紧急备用控制系统研究
耿艳东,王莎,王卫华,吴国辉,侯国庆
(河北华北石油荣盛机械制造有限公司,河北 任丘 062552)①
摘要:针对国内外老旧半潜式钻井平台缺乏有效二级干预手段来快速遏制井喷的问题,分析国际主流水下防喷器紧急备用控制系统特点与工作原理,综合考虑各系统可靠性、响应速度以及配置影响因素,确定梯度布置多种紧急备用控制系统的总体方案。探讨未来水下防喷器紧急备用控制系统的发展趋势,为海洋油气开发用井控设备的国产化提供参考。
关键词:水下防喷器;控制系统;分析
国内外有很多在役半潜式钻井平台建造于20世纪80~90年代[1],平台配套的防喷器组和控制系统历经多次大修,大多存在设备老化、控制系统使用性能下降、缺乏有效二级干预手段遏制井喷等诸多安全隐患。2010年发生的Deepwater Horizon井喷事故造成重大损失,促使各大钻井公司、相关机构及组织出台多种应对措施,其中重要的一项措施就是要求增加水下防喷器紧急备用控制系统,同时提高紧急备用控制系统的维护频率,从而提升钻井安全可靠性[2-3]。
1紧急备用控制系统特点分析
水下防喷器紧急备用控制系统也可称为水下防喷器应急安全控制系统,是一种应对海洋钻井突发状况的二级干预系统。该系统不同于抢险所用的应急封堵装置(即Capping Stack)[4],两者使用阶段不同。水下防喷器紧急备用控制系统主要用于水下防喷器主控制系统失效后,发生井喷的初期或井喷还未发生时,是保证海洋井控安全的最后一道屏障;应急封堵装置则是在主控系统与紧急备用控制系统全部失效且井喷事故发生后抢险使用。
目前广泛使用的紧急备用控制系统包含:自动停机系统(Deadman或EHBS)、自动模式功能(Automatic Mode Function,简称AMF)、自动剪切系统(Autoshear)、声控系统(Acoustic Control System)、ROV操作系统以及紧急脱断系统(Emergency Disconnect System,简称EDS)等[5-7]。
1.1自动停机系统
自动停机系统具备独立的控制箱或液压回路,可在水下防喷器主控系统的电路、液路均失效时自动关闭井口,主要用于NOV公司所产水下防喷器控制系统中,其基本液压原理如图1。该系统具备功能多样、响应迅速以及独立程度高等优点,但是系统激活需整个水下防喷器主控制系统处于完全失控状态,若有一项处于正常状态就不能激活,这样设定虽可避免非紧急情况的停钻事故,但也存在问题。例如井喷已经发生,主控系统电路完全失效但蓄能器仍旧有压力,自动停机系统因仅检测到电缺失无法激活,从而错过最佳响应期,导致事故扩大。
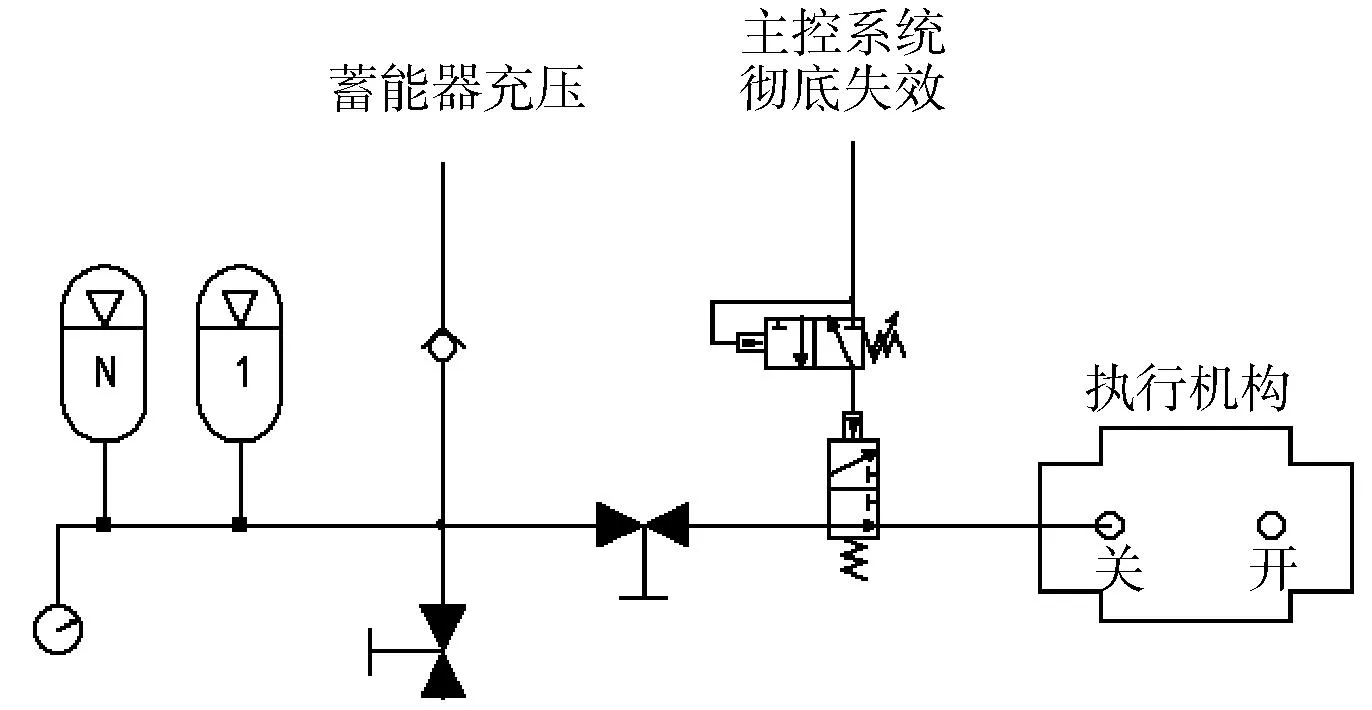
图1 典型自动停机系统的液压原理
1.2自动模式功能
自动模式功能是一种非独立式紧急备用控制系统,需借助主控系统部分组件及油路来实现井控操作,主要用于Cameron公司所产水下防喷器控制系统中。其触发条件及功能与自动停机系统相似,均需要主控制系统电液信号全部缺失时才能激活。该系统结构简单,成本较低且可完成较为复杂的动作指令。但由于该系统是非独立系统,需借用主控系统的部件,生存能力差,一旦主控系统的部分零部件失效时,系统亦无法启动。2010年发生的深水地平线钻井平台事故中的平台配备的自动模式功能未正常工作,错失了成功控制井压的机会,造成了严重后果。图2为深水地平线钻井平台自动模式功能简化失效原理图[8]。
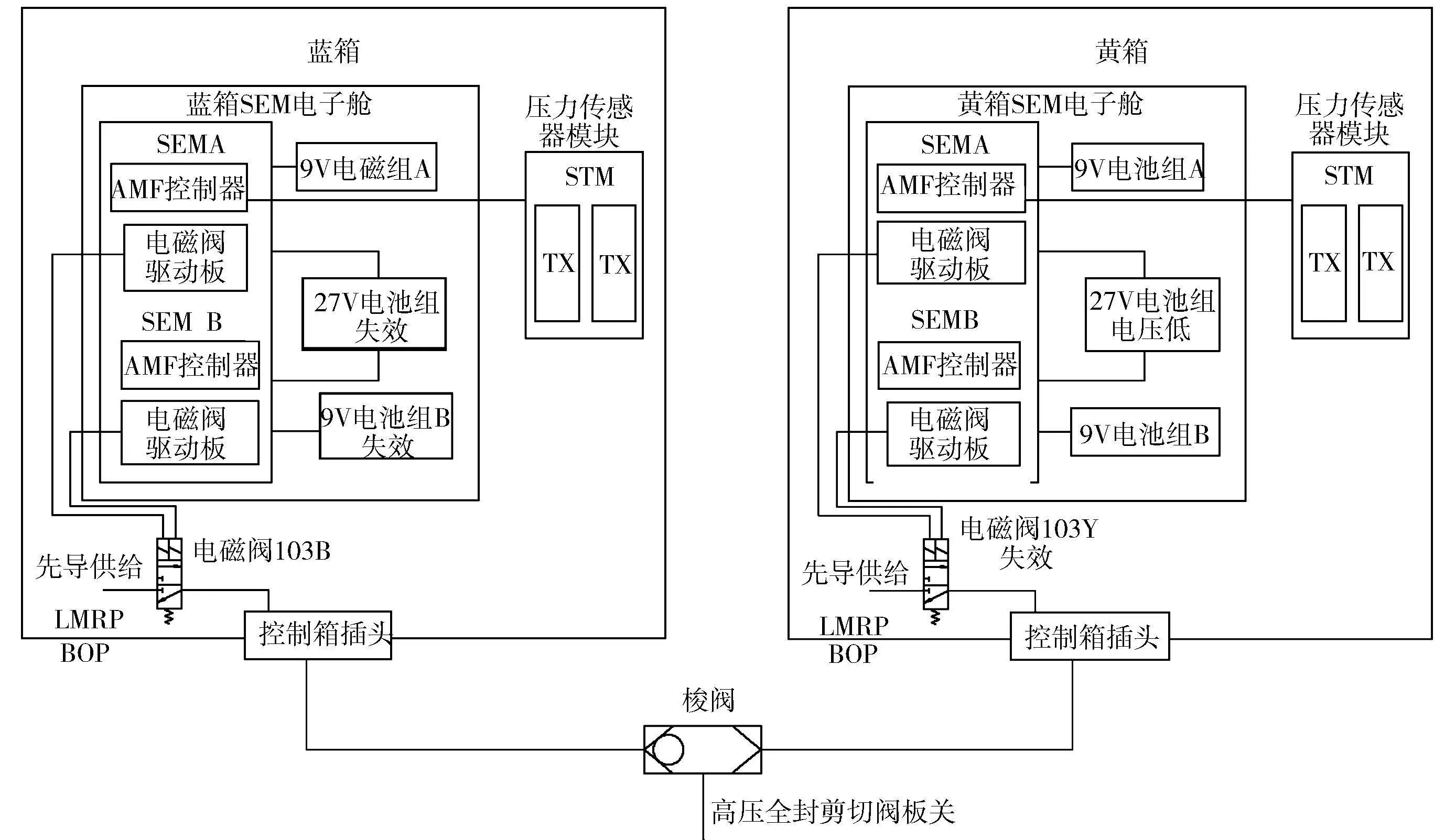
图2 深水地平线自动模式功能简化失效原理
1.3自动剪切系统
自动剪切系统也是一种独立式紧急备用控制系统,在NOV、Cameron以及Hydril等多家公司所产水下防喷器组控制系统中均有所应用,该系统可在条件满足时关闭一个全封剪切闸板,图3是一种典型自动剪切系统的液压原理图。其触发条件与自动停机系统、自动模式功能不同,只有在LMRP隔水管连接器意外断开时,才可以触发执行相应井控操作指令。该系统通过改造可以变为自动停机系统,Oceaneering以及Cameron等公司的自动剪切系统,均可实现此种改造,如图4。该系统结构简单、响应迅速,但其缺点是功能单一。
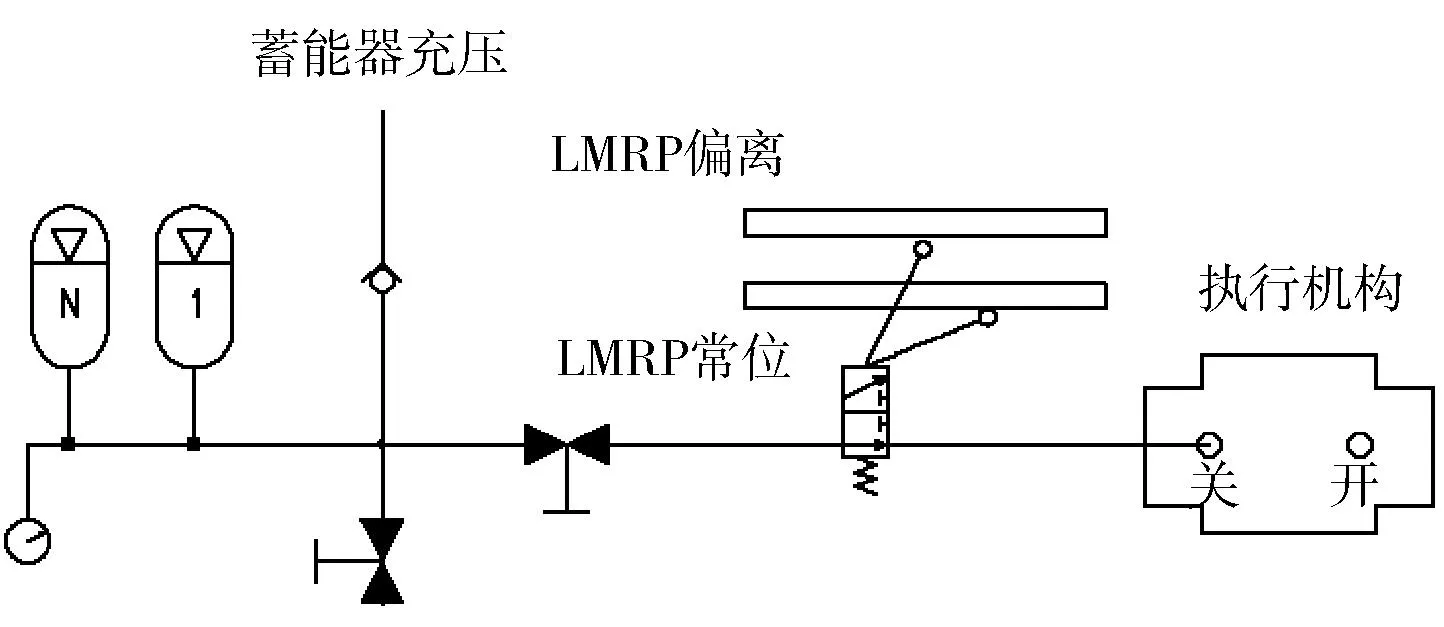
图3 典型自动剪切系统的液压原理
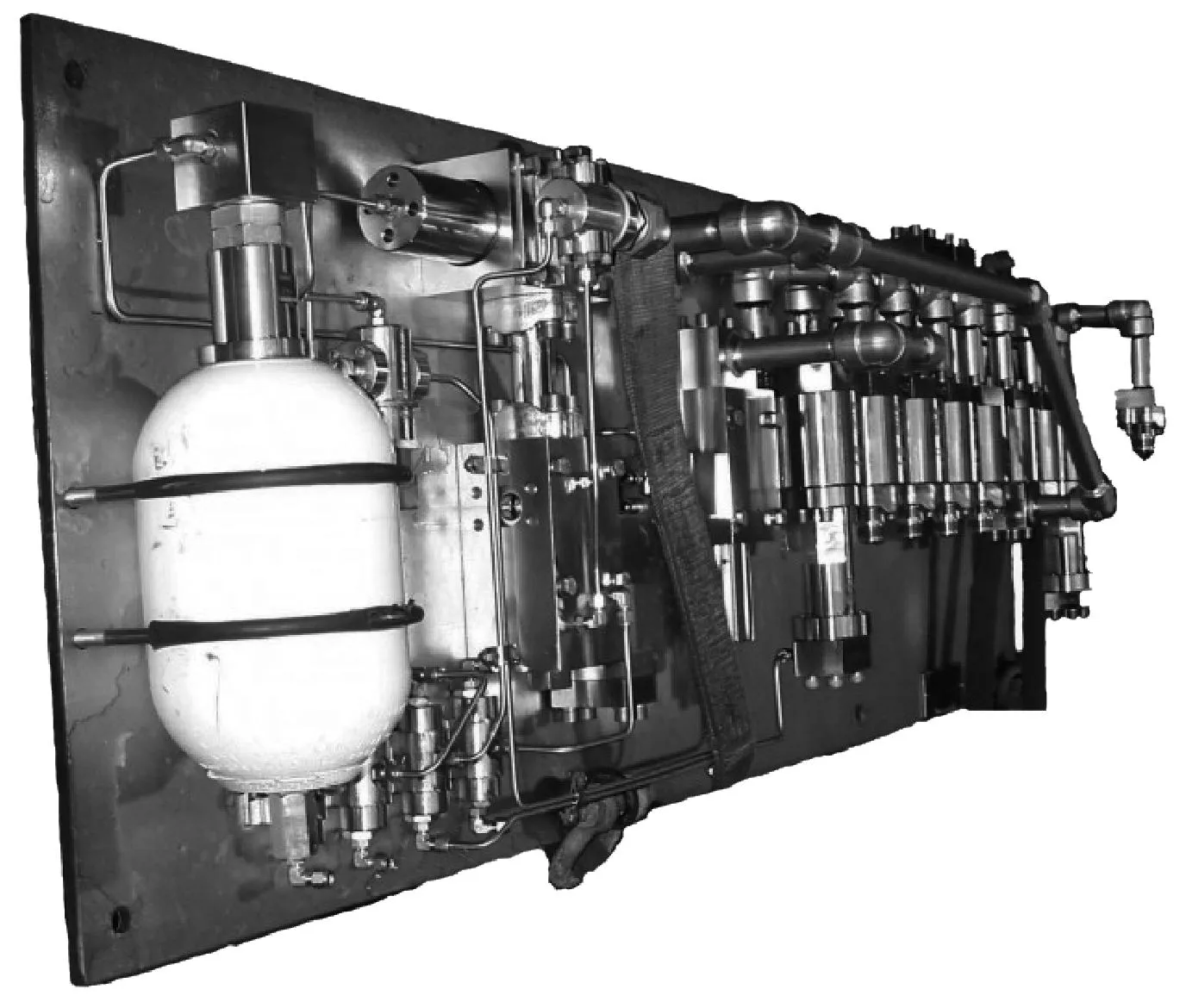
图4 Oceaneering自动停机/自动剪切控制箱
1.4声控系统
声控系统是一种独立式紧急备用控制系统,采用遥控控制,靠声波信号传递命令,可以在拖轮或救生艇上控制水下防喷器相关功能。声控系统主要由水面声纳部分、水下声纳部分以及水下声控控制箱组成。控制指令通过水面声纳部分编码形成独特的声波信号发送至水下声纳部分,然后水下声控控制箱的电子部分在接受水下声纳部分传送过来的声波信号后解码并动作相应液压阀实现防喷器的不同操作。图5是典型声控操作系统液压原理图。其特点是功能多样,可由操作人员根据需要进行多种应急操作,但其结构复杂,成本较高,响应速度较慢,易受海底噪声影响[9-10]。
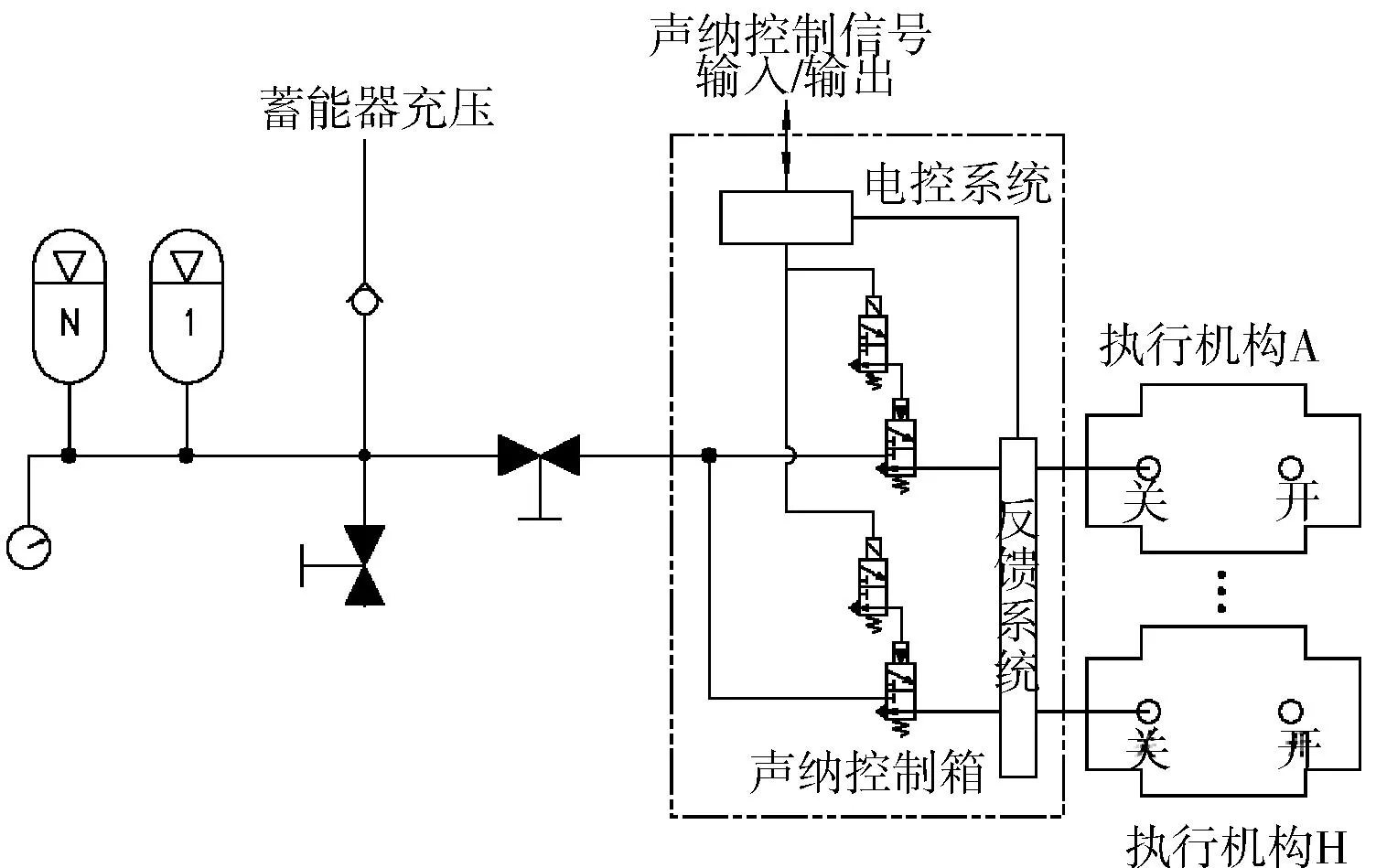
图5 典型声控系统的液压原理
1.5ROV操作系统
ROV操作系统是一种功能多样、应用广泛的紧急备用控制系统。该系统不是一个自动系统,需靠水下机器人靠近水下防喷器组上的控制面板实现操作,可根据需要选择不同操作顺序及功能,以应对多种突发情况。水下控制面板接口与结构均采用国际统一标准,液压液则由水面热线绞车或ROV自带泵提供[10-12]。面板一般根据控制对象位置不同就近安装,每个控制面板均代表一个控制对象操作指令。图6为典型ROV操作系统液压简图。ROV操作面板简单可靠,是钻井承包商比较认可的一种紧急备用控制系统,缺点是响应速度慢,必须配合水下机器人使用,成本较高。
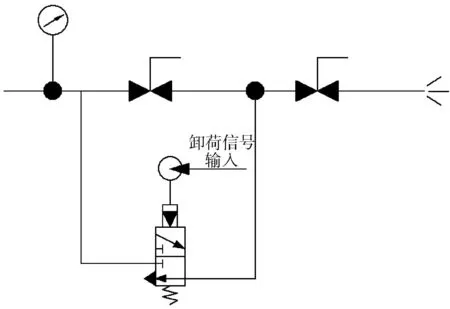
图6 典型ROV操作系统的液压原理
1.6紧急脱断系统
紧急脱断系统是一种广泛应用于浮式钻井平台的紧急备用控制系统,能在危急情况下快速封井并脱断[13-14]。紧急脱断系统由计算机系统控制,可在浮式钻井平台漂移出给定的海上警戒圈后,自动激活既定的功能序列,关闭井口脱开LMRP。警戒圈的范围大小与钻井平台所处水深以及隔水管倾斜的角度直接相关。响应时间取决于防喷器组配置,但需符合API STD 53要求。系统响应速度快,可完成复杂时序动作,缺点是对主控系统依赖性大,主控系统失效可能致其失效。
1.7紧急备用控制系统对比
通过对上述紧急备用控制系统的特点对比分析,水下防喷器紧急备用控制系统可以配合绝大多数主控系统使用;独立式紧急备用控制系统占较大比重;为提高响应速度,大部分紧急备用控制系统采用自动触发的时序动作;采用离散功能的紧急备用控制系统只有声控系统以及ROV操作系统,两者均为人工触发,操作者可根据水下情况选择激发功能,两者响应速度较差,如表1。
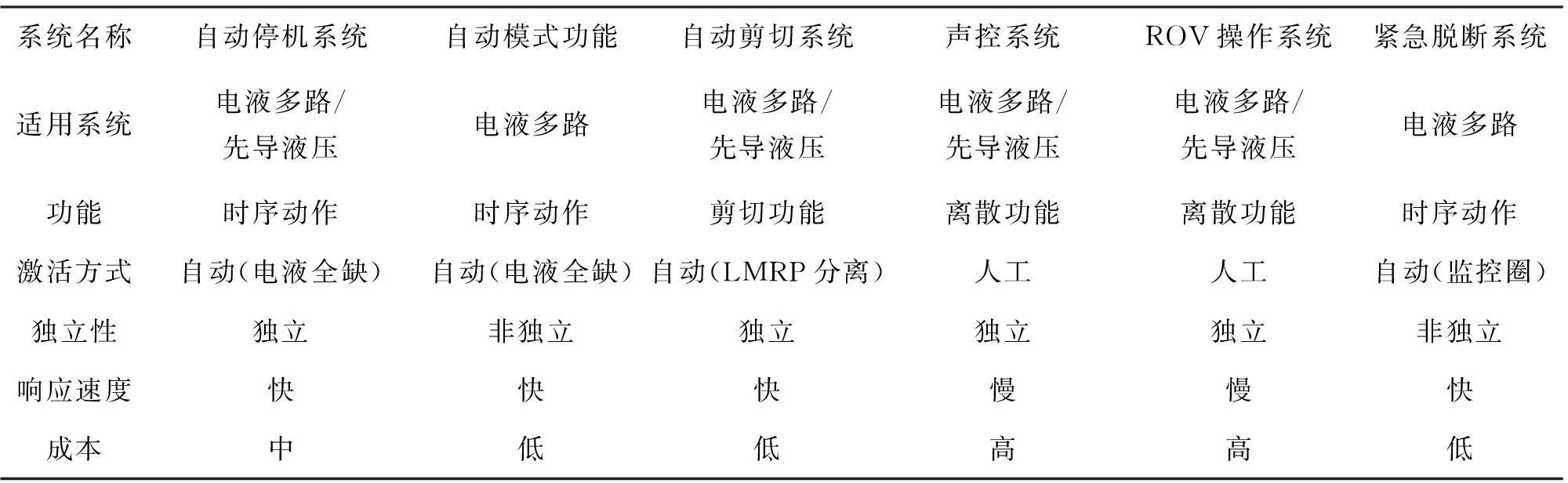
表1 主流水下防喷器紧急备用控制系统对比
2紧急备用控制系统配置影响因素分析
影响水下防喷器紧急备用控制系统配置的因素有很多,例如主系统类型、水深、海况、风险判断、用户操作习惯、成本以及响应速度等。另外,随着钻井技术日益成熟,相关的法律法规也在逐渐对紧急备用控制系统做出多项规定。这些都是设计人员在配置水下防喷器紧急备用控制系统需考虑的问题,其中尤其以风险判断、用户操作习惯、法律法规以及响应速度最为重要。
声控系统是独立式系统,生存能力强,但成本最高,且需为电池时常充电,适合海底噪声较少的海域使用;自动停机/自动剪切响应迅速,生存能力强,成本适中,适合深水恶劣工况使用;ROV操作系统结构最简单,是独立系统,生存能力强,若不考虑单独配备ROV则成本最低,适合各种海况使用;EDS响应速度最快,且成本增加不多,但是由于是非独立系统,需靠主控系统及其蓄能器才能完成指令,生存能力最差,且一般配备在动力定位钻井平台上,适合各种海况使用。
3紧急备用控制系统推荐配置方案
综合考虑上述配置影响因素,推荐新建钻井平台同时配备紧急脱断系统、自动停机与自动剪切系统、声控系统以及ROV操作系统等4套紧急备用控制系统。四套系统根据响应时间不同形成梯度布局,确保系统封井成功。各紧急备用控制系统可在不同阶段动作,最大限度保证钻井安全,具体配置如下:
第1阶段,发挥作用的是紧急脱断系统。该系统可在风暴到来之前或动力定位偏移导致隔水管破裂发生前发挥作用,自动执行一串预先设定好的时序动作,确保钻井安全,预防事故发生。
第2阶段,发挥作用的是自动停机与自动剪切系统。当水上、水下设备彻底失联或LMRP意外脱开时,井口已处于失控状态,该系统可自动启动,完成事先指定好的若干关键功能,确保井口关闭且LMRP连接器解锁脱开完毕。
第3阶段,发挥作用的是声控系统。当紧急情况发生而自动停机与自动剪切系统未能成功关井的情况下或平台无法继续停留进行紧急操作时,工作人员可以快速搭乘救生艇在距离钻井平台一定距离的海面通过便携式声控系统对水下防喷器组上的声控控制箱发出指令。
第4阶段,发挥作用的是ROV操作系统。该系统需下放水下机器人靠近事故防喷器组执行相应指令,因此响应速度最慢,一般只用在上述所有紧急备用控制系统全部失效,水下防喷器组无法遥控或自动执行封井操作时才启用。
4紧急备用控制系统国内研究应用
我国深海油气开发较晚,水下防喷器紧急备用控制系统的研制与使用远远落后于国际水平。国内大多数老旧平台基本不配备或配备很少紧急备用控制系统,这种情况直至2010年才有所改观,如表2。河北华北石油荣盛机械制造有限公司是国内首家对水下防喷器紧急备用控制系统进行系统化研究的单位。公司通过对国内外多艘半潜式钻井平台配备水下防喷器紧急备用控制系统的使用状况与结构进行调查分析,完成了自动停机/自动剪切系统、声纳控制系统以及ROV操作面板等的详细设计,掌握了相关设计技术,为国内在役平台升级进行技术储备。

表2 国内主要半潜式钻井平台水下防喷器紧急备用控制系统使用情况汇总
5紧急备用控制系统发展趋势
随着新技术的发展成熟以及对水下防喷器控制系统的安全可靠性要求越来越高,国外陆续出现了电池驱动水下关闭系统以及ROV可读水下数显面板[15-16]等新型紧急备用控制系统,这些新产品的出现标志着水下防喷器紧急备用控制系统呈现出以下发展趋势:
1)水下防喷器紧急备用控制系统功能更加多样性,响应更加迅速,性能更加可靠,逐步发展为独立式控制系统。
2)克服了外压以及绝缘问题的电控技术越来越多地应用于水下工作的各类控制系统中,系统可控性以及智能化程度大幅增加。
3)应对不同紧急情况的各类紧急备用控制系统逐渐融合,发展成一专多能的紧急备用控制系统。
6结论
1)综合比对各式水下防喷器紧急备用控制系统的优缺点以及适应情况,形成了多系统梯度布置、适应广泛的总体配置方案,设计出了国内首套多功能水下防喷器紧急备用控制系统主机。
2)多功能水下防喷器紧急备用控制系统主机在NOV公司自动停机系统的基础上进行改进,融合了自动剪切系统主要结构,同时具备了两套系统的优点,克服了两者不足,具有结构紧凑、响应迅速、适用于钻井各个阶段井控安全保障的特点。
3)虽然国内企业在水下防喷器紧急备用控制系统的整体设计与阀件制造上取得了一定进展,但国内薄弱的水下专用阀件设计制造能力制约了系统关键阀件的国产化与可靠性提升。
4)研制的水下防喷器紧急备用控制系统可用于国内外老旧钻井平台升级改造,提升海洋钻井安全可靠性。
5)今后将进一步完善多能水下防喷器紧急备用控制系统设计,并通过详尽的试验及模拟仿真分析提高阀件以及系统的可靠性,同时进行系统智能化等方面研究。
参考文献:
[1]Ted Moon.World Survey of Deepwater Drilling Rigs[J].Offshore Magazine,2014(7):114.
[2]Joint Industry Task Force to Address Offshore Operating Procedures and Equipment.White Paper:Recommendations for Improving Offshore Safety[R].U.S.Department of the Interior,2010.
[3]许宏奇,侯国庆,陈艳东,等.“3000米深水防喷器组及控制系统的研制”科技报告[R].中国科学技术信息研究所,2014,738736188-2007AA09A101/01.
[4]苏尚文,屈志明,侯国庆,等.水下应急封井装置技术研究进展与建议[J].石油矿场机械,2014,43(4):96-101.
[5]Raleigh S.Williamson.Evaluation of Secondary Intervention Methods in Well Control[R].Brookshire,WEST Engineering Services,Inc.,2003.
[6]Jeff Sattler,Ed Lewis.Qualitative Risk Analysis of Emergency BOP Control Systems to Ensure Availability[C]//IADC/SPE Drilling Conference,2004,IADC/SPE 87157.
[7]许亮斌,张红生,周建良,等.深水钻井防喷器选配关键因素分析[J].石油机械,2012,40(6):49-53.
[8]Internal BP incident investigation team.Deepwater Horizon Accident Investigation Report[R].London,BP Inc.,2010.
[9]苏山林.防喷器控制系统发展趋势的探讨[J].胜利油田职工大学学报,2005,19(3):45-46.
[10]曹式敬.超深水防喷器组及其控制系统配置探讨[J].石油钻探技术,2012,40(5):115-118.
[11]API Spec 17H,Remotely Operated Vehicle(ROV)Interfaces on Subsea Production Systems[S].2004.
[12]API Spec 17D,Specification for Subsea Wellhead and Christmas Tree Equipment[S].1992.
[13]API STD 53,Blowout Prevention Equipment Systems for Drilling Wells[S].2012.
[14]API Spec 16D,Specification for Control Systems for Drilling Well Control Equipment[S].2004.
[15]Bamford A S,Mowat C A,Wickramaratne L S,et al.Building and Testing a Battery-Operated Subsea Shut-Off System[C]//IADC/SPE Drilling Conference,2008,IADC/SPE 112660.
[16]吴国辉,许宏奇,陈艳东,等.国内外深水防喷器控制系统的发展[J].石油矿场机械,2014,43(6):27-30.
Research on Subsea Emergency Backup System in Offshore Oil & Gas Exploitation
GENG Yandong,WANG Sha,WANG Weihua,WU Guohui,HOU Guoqing
(RonghengMachineryManufactureLtd.ofHuabeiOilfield,Renqiu062552,China)
Abstract:Aiming at the problem that domestic and oversea old semi-submersible drilling platforms lacking efficient secondary intervention methods to contain blowout quickly,the character and working principle of international mainstream emergency backup systems are analyzed to take into account the reliability,response speed and configure affection factor,and the main scheme that gradient arranging several emergency backup systems is confirmed.The development trend of subsea emergency backup system is discussed,which offer reference for offshore oil & gas exploitation well control equipment domestic produce.
Keywords:subsea bop;control system;analysis
中图分类号:TE951
文献标识码:A
doi:10.3969/j.issn.1001-3482.2016.02.018
作者简介:耿艳东(1983-),男,河北高碑店人,工程师,现从事石油机械控制技术方面的研究工作,E-mail:18911063585@189.cn。
基金项目:国家高技术研究发展计划(863计划)“深水防喷器组及控制系统工程化研制”(2013AA09A220);国家科技重大专项“深水半潜式钻井平台及配套技术”(2011ZX05027-001)
收稿日期:①2015-08-16
文章编号:1001-3482(2016)02-0079-05
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
电子制作(2018年18期)2018-11-14
山东工业技术(2016年15期)2016-12-01
考试周刊(2016年88期)2016-11-24
科教导刊·电子版(2016年26期)2016-11-21
数字技术与应用(2016年9期)2016-11-09
科技视界(2015年25期)2015-09-01
中国中医药现代远程教育(2014年11期)2014-08-08
终身教育研究(2014年5期)2014-02-28