逻辑法航迹起始算法性能研究
2016-04-12 05:30:25赵德功夏永红匡华星
雷达与对抗 2016年1期
赵德功,夏永红,匡华星,丁 春
(1.91404部队,河北 秦皇岛 066001;2.中国船舶重工集团公司第七二四研究所,南京211153)
逻辑法航迹起始算法性能研究
赵德功1,夏永红2,匡华星2,丁春2
(1.91404部队,河北 秦皇岛 066001;2.中国船舶重工集团公司第七二四研究所,南京211153)
摘要:结合工程实际需要,在不考虑其他因素对目标检测概率影响的情况下,对不同的逻辑准则,根据状态转移法,分析和计算了逻辑法航迹起始概率随雷达扫描周期数的变化情况,并据此计算了4种典型逻辑准则下航迹起始所需要的平均扫描周期数。给出了在恒虚警率条件下虚假航迹率计算方法,并对4种典型逻辑准则下的虚假航迹率与扫描周期数的关系进行了仿真。提出了噪声背景下的航迹起始概率计算方法,并给出了恒虚警率检测条件下航迹起始概率随信噪比变化曲线。
关键词:雷达;目标跟踪;航迹起始;逻辑法;起始概率;虚假航迹率;信噪比
0引言
对于现代雷达,多目标跟踪是其最基本的任务之一。航迹起始是多目标跟踪技术中的重要组成部分,能够对进入雷达威力区的目标自动建立航迹。航迹起始算法主要分为两大类:顺序处理技术和批处理技术,前者适用于在相对弱杂波背景下的航迹起始,计算量小,执行效率高,主要有直观法和逻辑法;后者更适用于强杂波背景下的航迹起始,但计算量较大,主要有Hough变换法和修正的Hough变换法[1]。
作为工程应用中普遍使用的一种航迹起始方法,逻辑法航迹起始在对空和对海模式下均有较强的适用性。在不同应用背景下,m/n逻辑的选择、航迹起始时间以及虚假航迹率等成为逻辑法航迹起始算法重点关注的问题。本文针对逻辑法航迹起始算法,阐述了其基本原理,研究了航迹起始概率计算方法、航迹起始所需平均时间计算方法,以及恒虚警率条件下虚假航迹率计算方法,最后结合目标检测概率与信噪比关系给出在某一信噪比时航迹起始概率计算方法,为工程实际应用中m/n逻辑的选择及其航迹起始性能分析提供理论指导。
1逻辑法航迹起始
逻辑法航迹起始算法通过相关波门和位置预测来判定可能的航迹,一般处理过程包含以下几个步骤:
(1) 以第1次扫描得到的点迹作为航迹根节点,并通过目标可能的最大速度建立相关波门,对落入初始相关波门内的第2次扫描点迹均建立可能航迹。
(2) 对每个可能的航迹进行外推,以外推点为中心,根据航迹外推误差协方差建立相关波门,波门内与外推点距离最近的第3次扫描点迹作为该航迹关联点迹。
(3) 继续步骤2,直到形成稳定航迹。对于后续相关波门内一直关联不到点迹的航迹,作删除处理。
判断稳定航迹一般采用的方法是m/n逻辑。将连续多个周期扫描时相关波门内的点迹按顺序排列为点迹序列(z1,z2,…zi,…,zN)。如果在第i次扫描时相关波门内有点迹存在,则zi=1,反之zi=0。当连续n个窗口宽度内检测数达到某一特定值m时,便宣告航迹起始成功;否则,滑窗向前滑动一次扫描,再继续判定是否满足m/n准则,如图1所示。用于航迹起始的点迹是经过已有航迹关联后剩余的点迹。
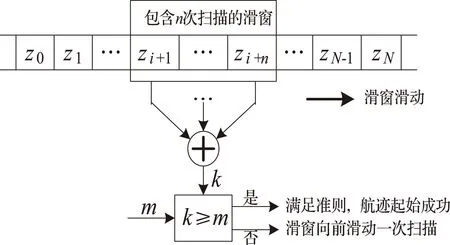
图1 m/n逻辑法原理示意图
2性能研究
对于任何航迹起始算法,工程应用中都比较关心两个问题:在一定的目标检测概率下,一定时间内航迹起始概率和正常航迹起始所需的平均时间。
2.1航迹起始概率
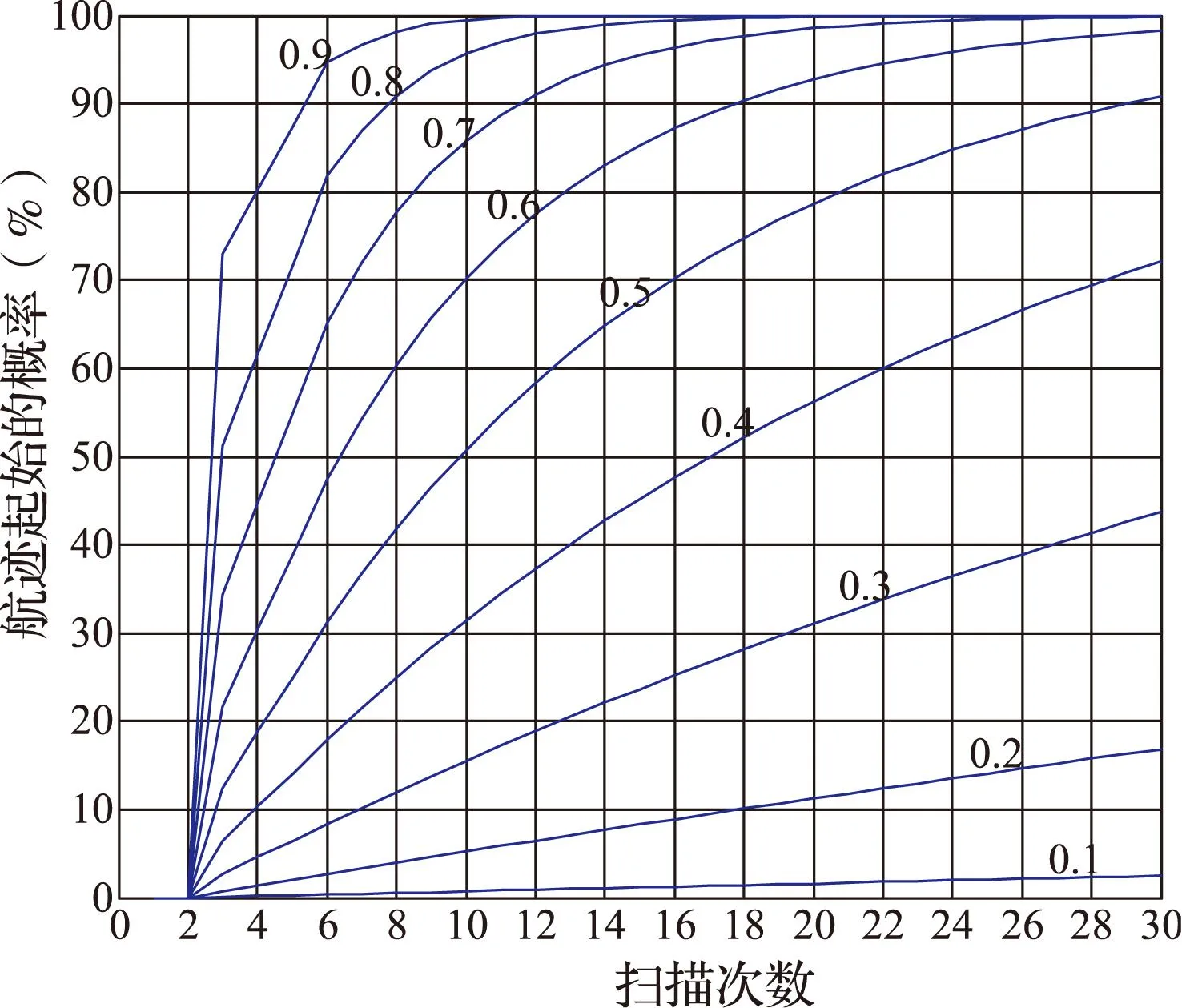
在利用逻辑法进行航迹起始时,随着雷达扫描周期的不断增加,目标航迹被起始出来的累计概率也随着增加,在达到一定的扫描数时理论上起始概率将达到100%。为了便于计算和推导,可将这个过程抽象描述为:给定N个相继可能发生的事件(雷达连续N次扫描),每个事件发生的概率为p(目标检测概率p)且相互独立,求在第N次事件之前(包含第N次)至少发生一次n个连续事件中获得m次成功的概率P(在雷达第N次扫描时,所有满足m/n准则的概率之和)。
该过程是一个滑窗计算的过程,可以通过马尔科夫理论方法递推计算[2],但比较复杂且容易出错。从第N-1次的观测计算结果递推第N次的过程可通过状态转移的概念来描述[3],进而简化运算,快速得到航迹起始概率的计算结果。本节在不考虑其他因素对目标检测概率影响的情况下详细阐述通过状态转移法计算航迹起始概率的方法,并通过仿真给出了几组典型的m/n逻辑航迹起始概率随扫描周期数变化曲线。
以3/4逻辑为例,其过程一共涉及12个状态,如表1所示。其中,z(k-3)、z(k-2)、z(k-1)和z(k)表示的是n个连续事件,这里n为4;0表示该事件未发生,出现概率为q=1-p,1表示该事件发生,概率为p。假定初始处于状态Si,当新的一次扫描结束后,窗口向后滑动一个单元,并对此时窗口内的状态进行判断,当到达状态S12时,即窗口内1的个数不小于m=3时,满足3/4逻辑起始准则,航迹起始成功。
因此,可以得到状态转移方程为

(1)
式中,SN=(S1,S2,…,S12)T表示第N次扫描时不同状态的概率矢量,F为概率转移矩阵:
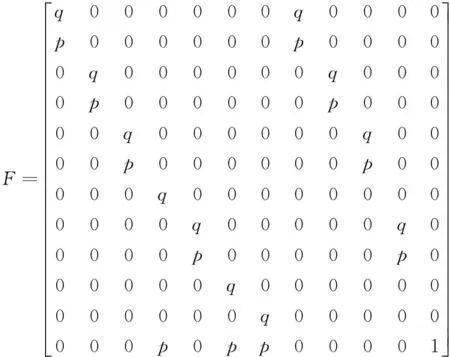
由此可以计算出第N次扫描时的概率矢量为
(2)
在SN中关心的只有状态S12,因为它对应着满足起始准则的概率,即累积的航迹起始概率。
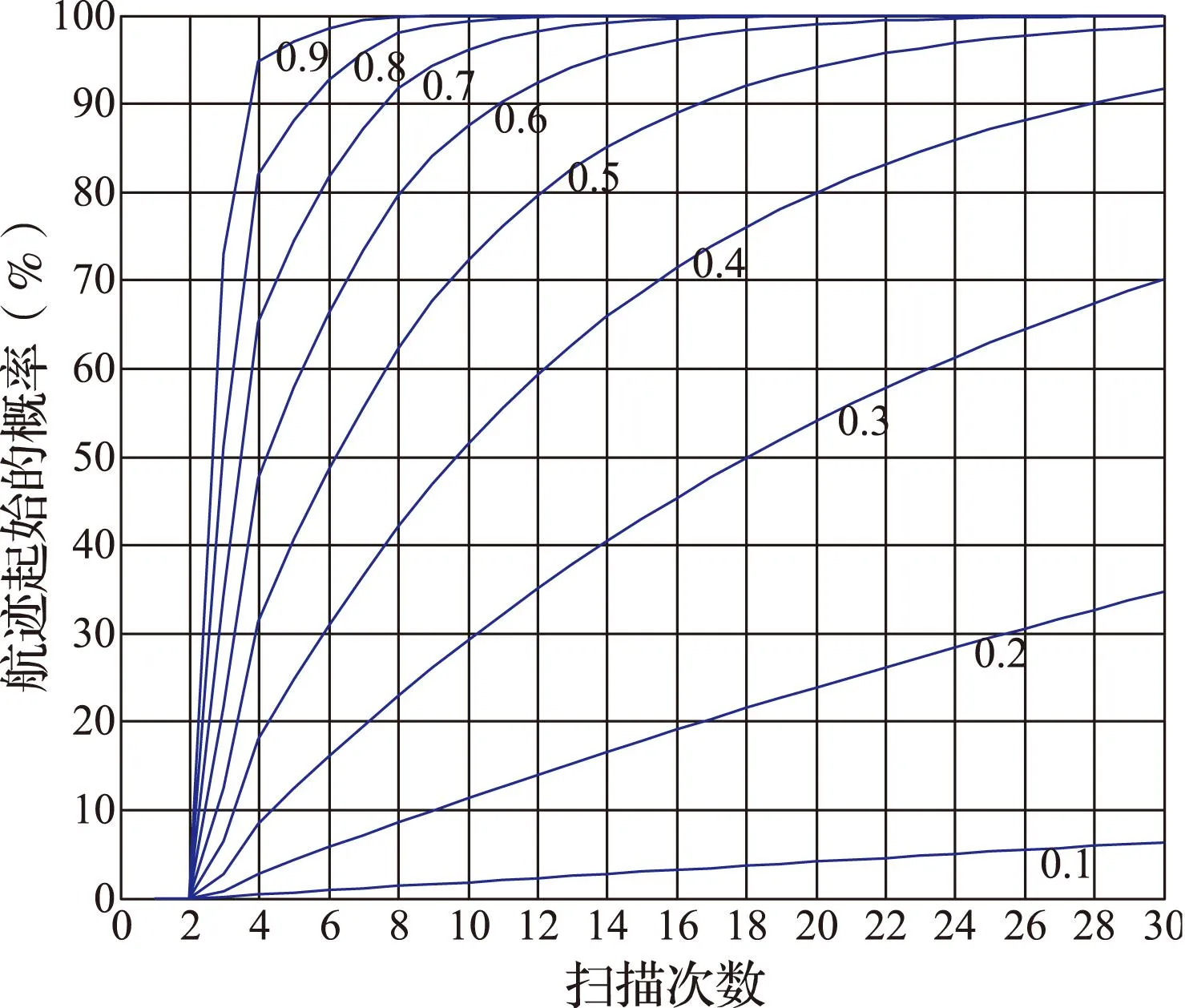
根据上述计算过程,可以得到以下几组典型m/n逻辑航迹起始累计概率与雷达扫描数的变化曲线,如图2所示。
2.2航迹起始时间
上一节中介绍了航迹起始概率计算方法,根据概率统计知识可以计算航迹起始所需平均周期数[2]:
(3)
其中,Nmin=m;Nmax为最大扫描次数,设定Nmax=5000次MonteCarlo仿真;P(n+1)-P(n)为第n+1次扫描时恰好起始的概率(不是累计概率),因为如果上一次扫描中已经起始成功,则状态会以p=1的概率保持,所以将上一次的概率减掉,只计算在本次状态才起始的概率。这样计算出的起始平均扫描数才是符合数理统计的概念。不同逻辑准则下航迹起始所需平均周期数如表2所示。
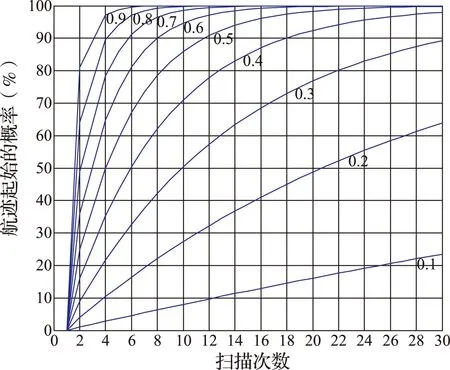
(a) 2/2逻辑

(b) 2/3逻辑
(c) 3/3逻辑
(d) 3/4逻辑

m/np=0.1p=0.2p=0.3p=0.4p=0.5p=0.6p=0.7p=0.8p=0.92/2110.0030.0014.448.756.004.443.472.812.352/362.6318.899.876.414.673.653.002.552.233/31043.0155.0051.4824.3814.009.076.384.773.723/4424.9568.1525.7613.728.776.274.843.953.38
从表中可以看出,给定逻辑准则和目标检测概率就可得此条件下航迹起始所需平均扫描周期数,如选取3/4准则,检测概率p=0.8,则大约4圈就可以航迹起始。在相同目标检测概率的条件下,航迹起始所需平均扫描数最少的是2/3逻辑准则。也就是说,2/3逻辑准则适合于快速航迹起始,而3/3逻辑起始速度相对较慢,特别是在检测概率较低时起始所需平均周期数远大于其他几个准则。这也说明3/3逻辑更好地抑制虚假航迹的出现。
3应用举例
3.1虚假航迹率
航迹起始时,在计算目标起始概率的同时往往也会关注虚假航迹率。本文给出一种恒虚警率检测条件下累积虚假航迹率的计算方法。该方法只考虑由虚假点迹(不考虑点迹凝聚过程,即直接利用恒虚警率检测的结果)所产生的虚假航迹。只要关联波门内有虚假点迹存在并满足起始准则,就认为会产生虚假航迹,不考虑航迹质量等指标对其进行的剔除处理,具体步骤如下:
(1) 确定考察区域分辨单元个数Nsum=NR×NA,NR为距离向分辨单元个数,NA为方位向分辨单元个数;设定每个分辨单元虚警率PF。
(2) 根据距离分辨单元△R和方位分辨单元△ρ的大小,计算关联波门(这里以圆形波门为例)内分辨单元格子数L=π(VmaxT)2/(△R△ρ),Vmax为设定的最大搜索速度,T为天线周期。
(3) 计算每个天线周期关联波门内至少出现一次虚假目标的概率pc=1-(1-PF)L。
(4) 按不同逻辑准则,计算以该分辨单元为根的虚假航迹起始概率pF_track,将该虚假航迹起始概率乘以总的分辨单元个数得到整个区域内的虚假航迹起始概率PF_track=pF_track×Nsum。
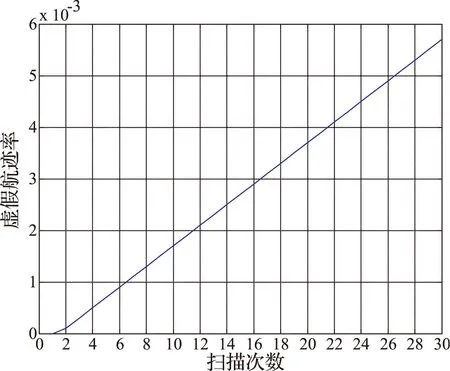
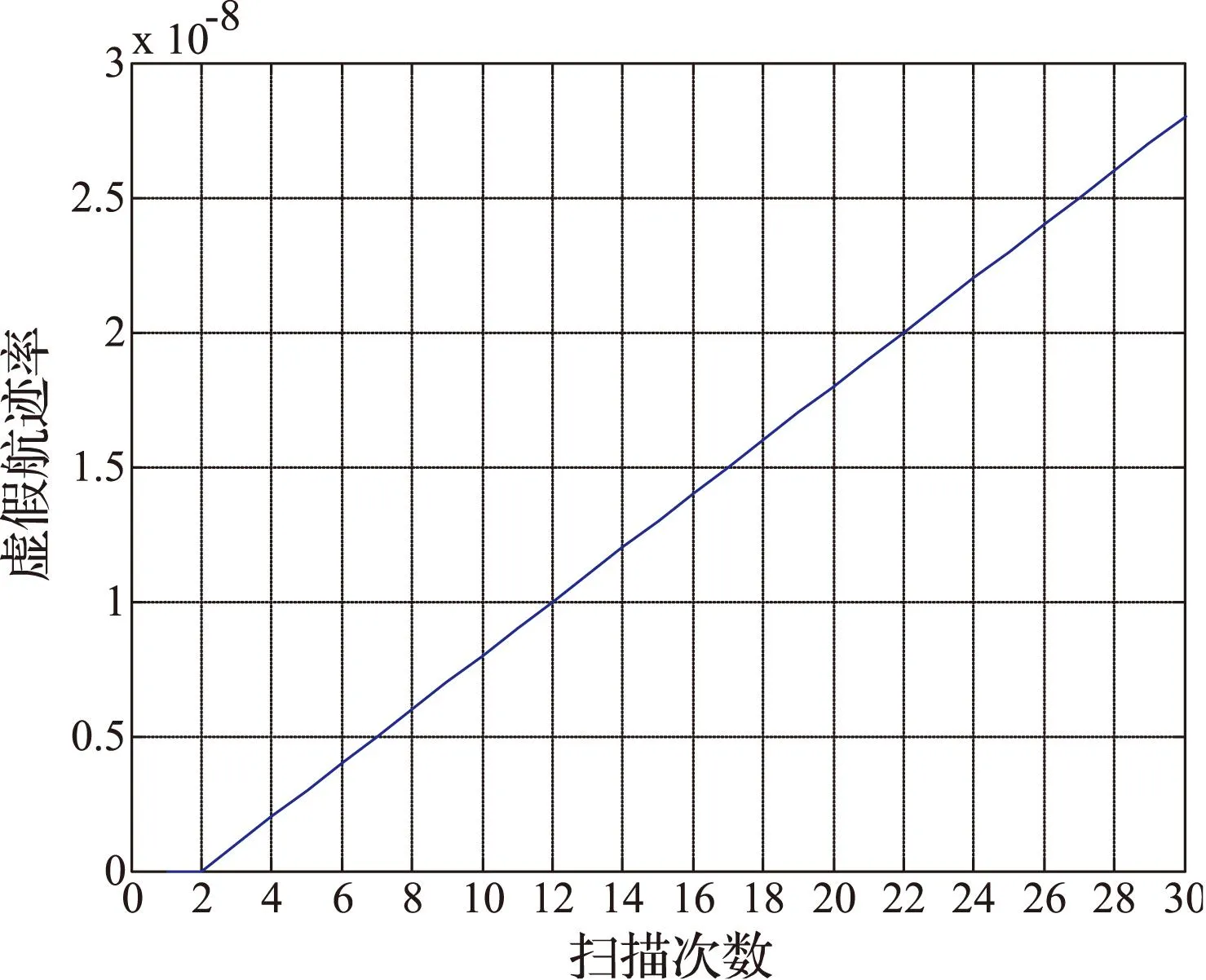
例如,假设分辨单元数Nsum=1000×1000,虚警率PF=10-6;距离分辨单元△R=30m,观测区域中心距离R=50km,天线方向图主瓣宽度为△θ=0.5°,方位分辨单元△ρ=R×△θ=436m;Vmax=20m/s,T=10s,关联波门内分辨单元格子数L=π(VmaxT)2/(△R△ρ)=10;pc=1-(1-PF)L=10-5。按照第2节介绍的方法,计算出几组典型m/n逻辑下虚假航迹率随扫描次数变化曲线,如图3所示。
从图中可以看出,当“m/n”逻辑中的m值相等时,虚假航迹率为同一数量级。这是因为虚假存在的概率接近0,而不存在的概率接近1。3/3逻辑虚假航迹率最低,与上一节分析得到的结论一致。

(a) 2/2逻辑
(b) 2/3逻辑
(c) 3/3逻辑

(d) 3/4逻辑
3.2噪声背景下航迹起始概率
雷达进行恒虚警率检测时,目标检测概率随信噪比增加而变大。如果固定航迹起始周期数,则可以得到在一定周期内航迹起始概率随信噪比变化曲线。例如,对于SwerlingI型起伏目标(船只和大型目标),检测概率与信噪比的关系近似满足[4](单个脉冲检测,不作积累等处理):

(4)
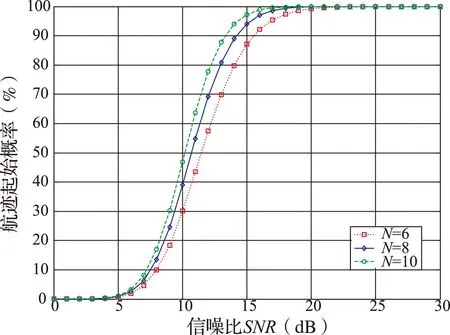
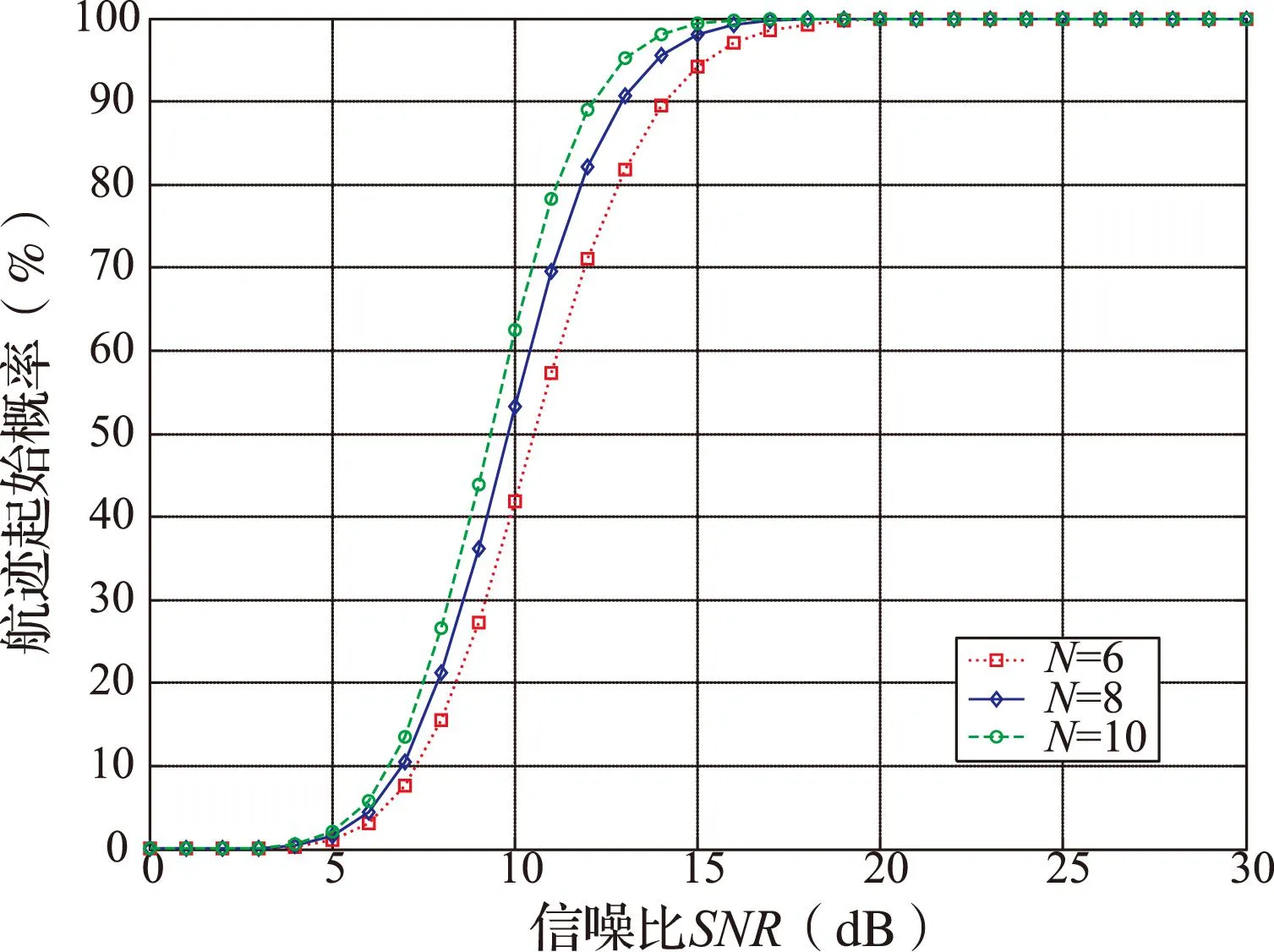
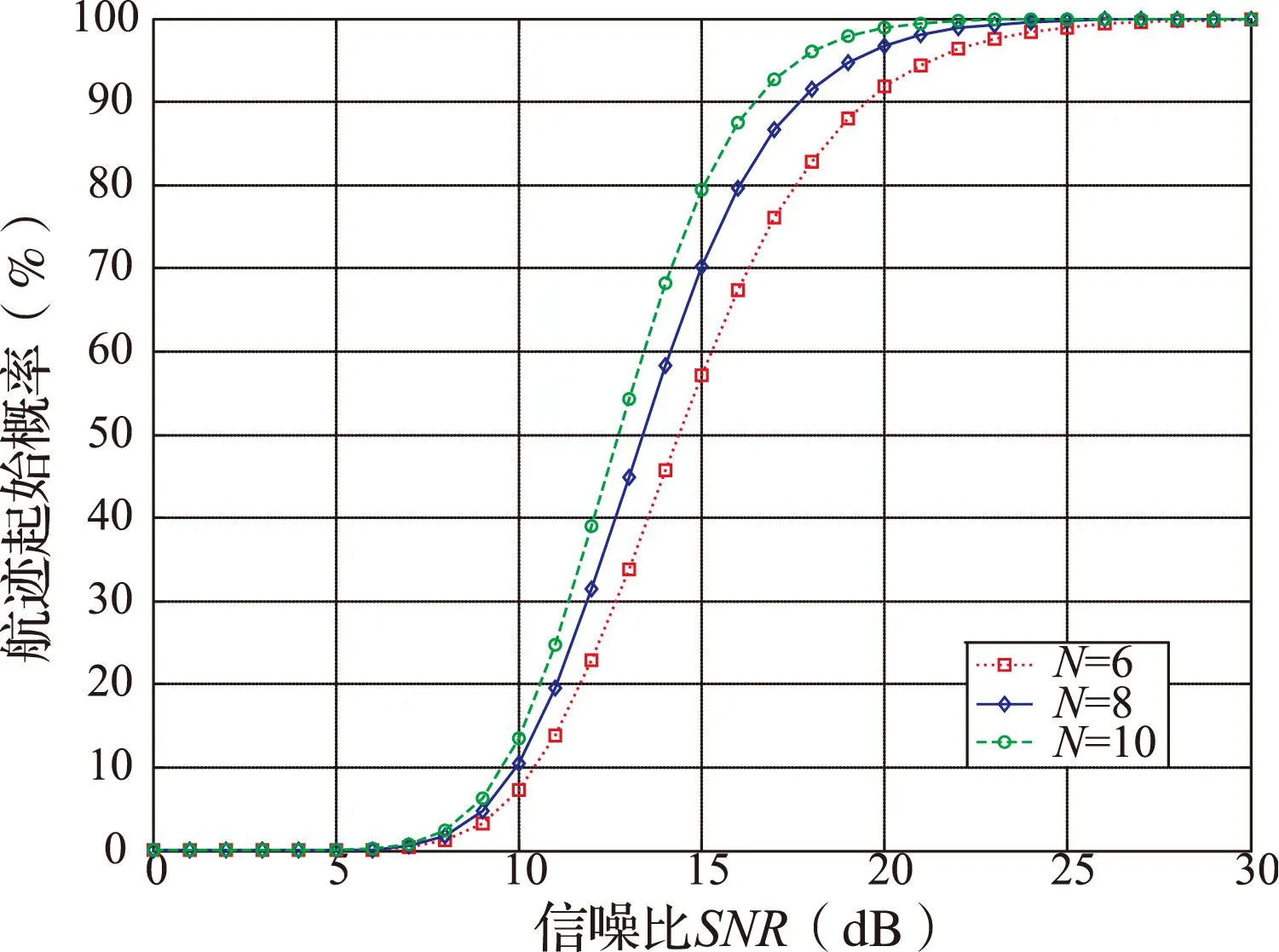
式中,SNR为以dB为单位的信噪比,PD为目标检测概率。检测概率随信噪比变化曲线如图4所示。以典型值PF=10-6为例,按照第2节中介绍的航迹起始累积概率计算方法可以得到在不同周期数下航迹起始概率随信噪比变化曲线如图5所示,这里取了N=6、N=8和N=10。
根据得到的虚假航迹率和一定信噪比下航迹起始概率,可以与检测前跟踪算法的处理结果进行对比。因为检测前跟踪算法得到的直接是航迹,对应的是虚假航迹率。通过本方法可以在一定信噪比下将两种方法处理结果进行对比。例如,对于3/4准则,在虚警率PF=10-6和信噪比SNR=10dB时,经过N=10个周期的处理,目标航迹起始概率为20%,航迹起始概率较低,虚假航迹率为2.2×10-8。
在实际信号处理过程中,不会直接用单个脉冲作检测,而是先进行多个相邻脉冲间的积累后再检测,脉冲积累会带来一定的信噪比增益,因此在实际应用中应减去脉冲积累增益。

图4 恒虚警率检测时检测概率随信噪比变化曲线
(a) 2/2逻辑
(b) 2/3逻辑
(c) 3/3逻辑

(d) 3/4逻辑
4结束语
本文根据状态转移法推导了航迹起始概率和航迹起始所需平均扫描周期数计算方法,给出了在恒虚警率检测条件下虚假航迹率和噪声背景下航迹起始概率计算方法,并通过仿真给出了几组典型m/n逻辑的相关概率曲线,为工程实际应用提供参考。但是,文中只考虑了噪声背景下的概率计算,关于杂波背景和随机干扰情况下航迹起始的性能将是下一步研究的问题。
参考文献:
[1]何友,修建娟,张晶炜,等.雷达数据处理及应用 [M].2版.北京:电子工业出版社,2009:87-93.
[2]F R CASTELLA.Sliding Window Detection Probabilities[J].IEEE Transactions on Aerospace and Electronic Systems,1976,12(6):815-819.
[3]A Farina,F A Studer.雷达数据处理[M].匡永胜,张祖稷,等译.北京:国防工业出版社,1988:183-188.
[4]John N Briggs.航海雷达目标检测[M].席泽敏,夏惠诚,等译.北京:电子工业出版社,2009:563-580.
Performance analysis of track initiation algorithm with logic method
ZHAO De-gong1, XIA Yong-hong2, KUANG Hua-xing2, DING Chun2
(1.Unit 91404 of the PLA Navy, Qinhuangdao 066001, China;2. No.724 Research Institute of CSIC, Nanjing 211153)
Abstract:According to actual engineering requirements and the state transition method, without considering the effect of other factors on the target detection probability, the variations of the initial probability of track with the logic method with the number of scanning period are analyzed and calculated for different logic rules, on the basis of which the average number of scanning period required for the track initiation is calculated under four typical logic rules. The method of calculating the false track probability is given on the CFAR condition, and the relations between the false track probability and the number of scanning period are simulated under four typical logic rules. The method of calculating the initial probability of track is presented on the noise background, and the variation curves of the initial probability of track with the SNR are given on the CFAR detection condition.
Keywords:radar; target tracking; track initiation; logic method; initial probability; false track probability; SNR
中图分类号:TN957.52
文献标志码:A
文章编号:1009-0401(2016)01-0018-06
作者简介:赵德功(1983-),男,工程师,硕士,研究方向:雷达与电子对抗;夏永红(1989-),男,助理工程师,硕士,研究方向:雷达微弱目标检测与跟踪;匡华星(1978-),男,高级工程师,硕士,研究方向:雷达总体和数据处理;丁春(1983-),男,高级工程师,硕士,研究方向:雷达数据处理。
收稿日期:2015-07-14;修回日期:2015-09-11
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
科技创新与应用(2016年36期)2017-02-21 18:48:01
电脑知识与技术(2016年27期)2016-12-15 19:37:37
科技视界(2016年5期)2016-02-22 12:25:31
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34