
母线保护刀闸位置异常时的自适应校正
2016-04-10 06:38黄继东王智勇赵晓铎胡沙沙
电力系统保护与控制 2016年6期
黄继东,肖 锋,王智勇,赵晓铎,胡沙沙
母线保护刀闸位置异常时的自适应校正
黄继东,肖 锋,王智勇,赵晓铎,胡沙沙
(国家电网许继集团有限公司,河南 许昌 461000)
简要分析了支路刀闸位置异常对母线保护的选择性和可靠性的影响,评估了刀闸位置异常给保护装置带来的误动或拒动的风险,提出了基于刀闸位置计算的流入流出的电流矢量和(简称IO差流)守恒原理的刀闸位置异常智能校正方案。在大差差流平衡且仅有一段母线小差IO差流不平衡时进入校正逻辑,保护尝试着将无位置支路的电流加入小差IO差流不平衡的母线。若加入后所有母线的小差IO差流均平衡,则将本支路强制置于被校正的母线上;若不平衡,则尝试加入另一条母线上。此外还论述了校正过程中用到的IO差流平衡的判别门槛以及判定校正成功的门槛的选取原则。最后通过仿真分析论述了该方案的可行性。
刀闸位置异常;矢量和;IO差流;校正
0 引言
变电站的母线上一般连接较多的支路,多段母线的接线方式中这些支路需要根据运行方式的要求在两条母线间进行倒闸操作,母线保护如何准确识别支路运行在哪条母线上并将其投入相应的保护范围内是母线保护的核心技术。
在母线上发生故障时,母线差动保护正确动作是其第一步,动作后根据支路的运行状态选择性跳闸是其第二步。即便母线保护能够根据小差准确地判别并选择性地跳开故障母线,如何准确地跳开故障母线所连接的支路呢?在母线保护中,保护对于支路运行状态的识别和母线故障时对跳闸对象的选择均依赖于支路的刀闸位置。
在双母线接线系统中,若接入母线保护的有源支路的刀闸位置辅助接点丢失或者不良,正常情况下对于保护和系统的运行不会产生太大的影响,但系统中有故障时影响极大。首先,发生区外故障时丢失刀闸位置的支路提供的短路电流无法计入母线差动保护的小差电流,小差差流的非故障特征缺口就会造成母线保护的区内外判别不准确,付出的代价是母线保护区内外故障判别的准确性的丧失。其次,母线区内故障时,丢失刀闸位置的支路提供的短路电流无法计入正常的母线,则可能会造成母线保护拒动[1]。
假设丢失刀闸位置的支路在1母上运行,那么1母发生故障且丢失刀闸位置支路提供较大短路电流时,1母就会因为对差流贡献最大的支路电流未计入差流而拒动;2母发生故障时,丢失刀闸位置支路提供的短路电流也无法计入1母小差,因此1母有很大差流并导致1母差动保护误动。由此可见,刀闸位置丢失对母线保护的动作行为以及电力系统安全稳定运行有很大影响[2-4]。
因此,母线保护应能够及时检测出刀闸位置异常,并对其进行智能自适应处理[5]。论文提出了基于刀闸位置计算的流入流出的电流矢量和(简称IO差流)守衡的刀闸位置智能校正方案。
刀闸位置校正的难点在于如何基于负荷电流识别需要校正的支路以及校正的正确性[6-7]。这里的校正电流相关门槛的选取极为关键。门槛值取高了,可能达不到校正的电流平衡条件,校正逻辑可能无法发挥作用。校正门槛取低了,可能会误投入校正逻辑。论文结合系统故障特征对大差平衡和小差的门槛进行了详细的分析探讨。
1 基于差流平衡原理的校正方案
根据基尔霍夫电流守恒定律:对于正常运行的负荷支路,在无系统故障的情况下,经过每个支路流入流出的电流的矢量和为零。在正常情况下,所有支路的电流均经过刀闸流入或流出母线保护系统,在图1所示的模型中,母联 CT极性指向1母,基于刀闸的IO差流可以用式(1)~式(3)表示。

图1 双母线母线模型

(2)
(3)
若刀闸位置全部正确且无系统故障,流经所有刀闸位置支路的IO差流的矢量和理论上为0,即

在图1所示的母线模型中,我们假设支路U2刀闸位置丢失,则母线保护在计算小差IO差流和大差差流时就无法将支路电流计入,因此差流产生缺口,将会不再平衡,如式(5)、式(6)。
(5)

在仅有一个支路的刀闸位置丢失的情况下,我们可以基于此IO差流的特征尝试着对丢失刀闸位置的支路的运行状态进行校正处理。这里定义用于识别大差差流平衡状态的识别门槛,定义用于小差IO差流平衡状态识别的门槛。若大差差流的幅值小于且满足仅有一条母线的小差IO差流大于不平衡门槛,则进入基于IO差流的刀闸位置校正逻辑。
保护首先需要找到造成母线IO差流不平衡的支路,这里引入用于判别有负荷电流但没有刀闸位置的门槛。保护对所有支路的刀闸位置和负荷电流的大小逐个判别,当判别出有负荷电流但无刀闸位置时,保护判定为该支路刀闸位置丢失。支路有流无刀闸位置判别逻辑基于全周傅氏算法判别。式(7)用于支路的有效值计算,式(8)用于支路电流门槛的判别,式(8)成立时则认为满足该支路有流。

(8)
判出支路有流无位置之后,保护尝试着将此有流无位置支路的电流逐个加入各母线小差IO差流,进行差流平衡校验。若加入某条母线后,1母IO差流、2母IO差流、大差差流均平衡,则认为支路校正成功。若差流不平衡,则认为校正失败,尝试将该支路校正到2母上,若校正到2母上之后的1母IO差流、2母IO差流、大差差流均平衡,则认为将支路校正到2母上是正确的,校正流程见图2。
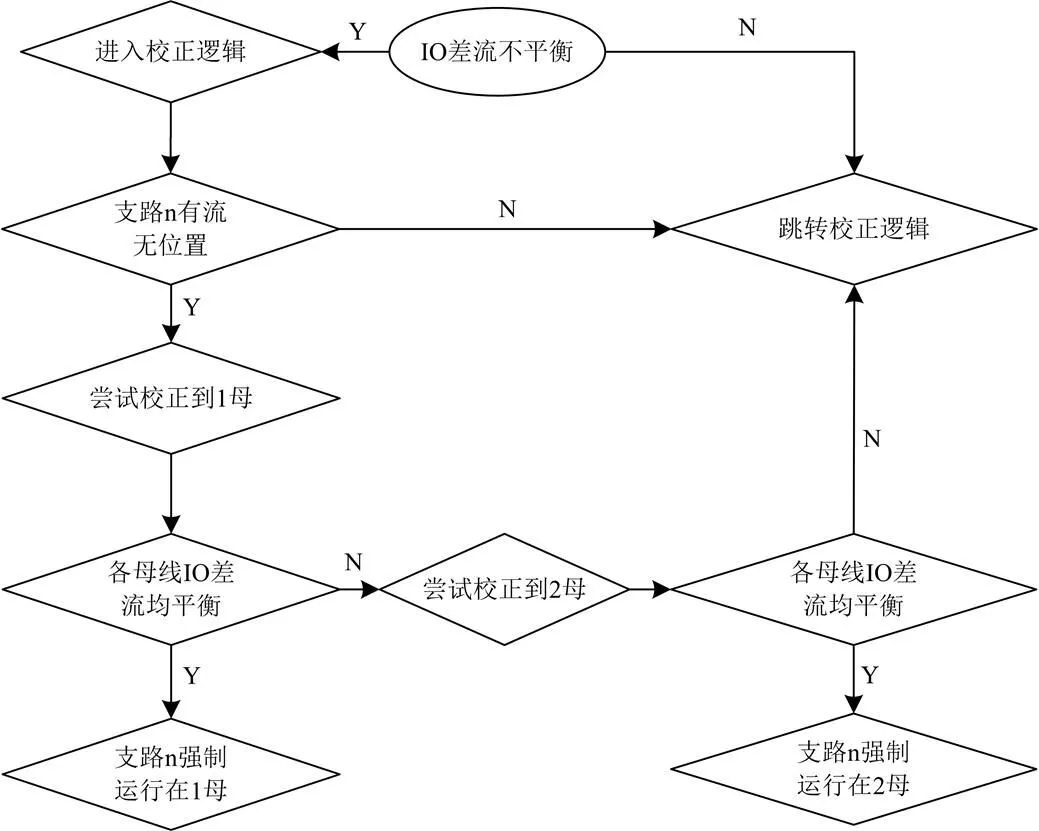
图2 刀闸校正的逻辑框图
刀闸位置校正逻辑若考虑使用支路电流的有效值,则由于一个相量在复平面内可能对应于无穷多个矢量,不同的相角下由式(7)计算出来的有效值则完全有可能相同,那么若简单地使用有效值进行差流平衡校验则存在误校正的可能性。所以,刀闸位置的校正逻辑应基于IO差流的复平面内设计。

(10)
(11)
式(9)~式(11)均满足且大差差流和2母小差IO差流均平衡时,则认为支路k向1母校正成功。
2 校正门槛的选取
刀闸位置异常的校正逻辑其前提是正确识别出IO差流不平衡,找准待校正的母线,因此合理选取母线IO差流平衡判别的电流门槛是关键。220 kV系统中,支路负荷电流一般不超过0.3 A(二次值),若识别门槛及校正门槛值选取较大,则校正逻辑无法发挥其作用;若识别门槛及校正门槛值选取较小,则不平衡电流会影响到判别的准确性,存在误识别以及误校正的风险。
在刀闸位置校正逻辑中大差不平衡用于启动校正逻辑,小差不平衡用于判定校正是否成功,下面分别介绍大差不平衡和小差不平衡门槛的选取原则。
根据系统特征,母线故障时故障电流一般大于电流的二次额定值(n);母线保护装置上CT断线的判定门槛为整定值,与系统特征以及支路负荷的分配有关,CT断线电流定值一般整定为0.2n,所以在选取大差平衡的门槛时仅需要躲开CT断线带来的IO差流即可;考虑到灵敏度校验,大差平衡的门槛可取值为0.9倍CT断线电流定值。
为了防止CT断线电流定值整定值过大或者整定异常引起误投入校正逻辑,还需要对大差平衡门槛做出限定。在保护判定为启动时一般认为发生了故障,因此,大差差流应与保护的启动门槛相配合。若大差差流已经满足启动条件,则认为系统中可能发生了故障,大差必然不再是平衡状态,此时也不宜再进入校正逻辑。
一般情况下为了保证启动逻辑的灵敏性,大差差流的突变量启动门槛取为0.2n,在判定大差差流平衡时应该躲开此突变量启动门槛,即大差平衡门槛应小于突变量启动门槛0.2n。

在校正判别逻辑中大差差流的平衡性的判别是找到平衡的最大允许门槛,而小差IO差流平衡性的判别则与大差差流平衡性的判别相反,需要找到不平衡的最小门槛。
由于传变误差、采样误差、计算误差的存在,母线保护的大差和小差差流本身会存在一个不平衡电流,选取小差不平衡门槛时应该考虑与保护本身不平衡电流的配合,即应满足式(13)。



综合式(14)和式(15),小差IO差流的判别门槛应按照式(16)取值。
(16)
2.3 故障过程中校正逻辑的保持
丢失刀闸位置的支路经差流平衡校验后,支路运行状态可以校正,若校正后的支路所在母线故障,则故障母线的IO差流的相位可能发生改变,基于向量算法的IO差流在方向变化的一瞬间可能会出现短暂的IO差流平衡状态返回的情况。在图3所示的系统负荷中,母线保护CT断线电流定值为0.1 A,差动保护动作门槛为0.4 A,则大差电流的校正门槛为0.09 A,小差不平衡的门槛为0.06 A。

图3 故障前后电流矢量图
若支路1刀闸位置丢失,则1母IO差流为0.15 A∠180°,2母IO差流为0.05 A∠180°,大差差流为0.02 A∠180°,满足校正条件。校正成功后,若发生I母区内故障,故障时1母IO差流为0.65 A∠0°,2母IO差流为0.05 A∠0°,大差差流为0.68 A∠0°。在故障初始阶段,小差IO差流和大差差流相位与故障前相比均反相,则基于全周傅氏算法的1母小差IO差流会出现幅值为0的瞬间(虚线内),如图4。

图4 1母小差IO差流过零
在虚线示意的曲线上,全周傅氏算出的小差IO差流为0,校正逻辑判不出小差IO差流不平衡,校正成功逻辑则会瞬时返回。而母线故障后大差差流瞬间达到很大,因大差差流不平衡再也无法进入校正逻辑,因此所谓的校正只能在无故障时起作用,在真正故障时校正逻辑瞬间被解除。
因此刀闸位置校正逻辑要躲开母线故障时差流数据跨窗的问题。一种可用的方案为在软件校正成功后将支路刀闸位置智能校正的状态延时确认和保持。校正逻辑的延时和保持时间应与校正逻辑的算法相配合,躲过全周傅氏算法的数据窗即可,全周傅氏算法的数据窗为20 ms,在实际应用中,延时和保持的时间可取为30 ms。
2.4 本校正方案的优点
本论文所述方案的优点在于刀闸位置校正方案的门槛选取能够自适应调整,保护根据系统状态特征、差流特征灵活选取门槛,能够实现对装置差流的自适应跟踪。论文对大差差流平衡判别门槛的选取、小差差流平衡判别门槛的选取、启动校正逻辑门槛的选取、判别校正是否成功门槛的选取进行了详细的论述。
在智能变电站中,合并单元高精度、高暂态特性CT的应用,使得装置的不平衡电流水平大大降低,一般情况下220 kV系统中母线保护的不平衡电流不超过30 mA。这样根据本文的方案,支路电流不低于60 mA的支路刀闸位置丢失时,保护均可进行校正,由此可见,论文将刀闸位置校正对负荷电流的依赖性降低到最低。
3 仿真分析
以双母线模型为例,我们简要介绍基于RTDS系统的仿真验证,如图5。支路1为母联、支路2、支路4运行在1母,支路3和支路5运行在2母,支路2为刀闸位置丢失,通过改变RTDS系统中支路4和支路5的负荷电流大小考验校正逻辑的正确性。其中,CT断线电流定值整定为0.4 A,n为1 A。
在RTDS仿真模型中,通过调节支路4和支路5的负荷电流,使得支路2的负荷电流在待考核的差流门槛区间范围内,连续得到几组数据,记录实时数据量值见表1、表2。在5种方式下,分别模拟支路2刀闸位置丢失后Ⅰ母和Ⅱ母上发生母线故障,支路2的跳闸行为见表1、表2。若支路2正确跳闸,则可认定为基于差流平衡校验方案正确校正。根据式(12)可知取值为0.2 A,根据式(14)可知取值为0.08 A。
表1 不同方式下Ⅰ母故障时的支路2跳闸行为

Table 1 Branch 2 tripping when bus Ⅰ fault under different modes 单位:A
分析表1数据量值,方式1、方式2不满足小差差流不平衡的条件,不执行刀闸位置校正逻辑,保护认为支路2刀闸位置丢失。方式3、方式4满足大差差流平衡,小差差流不平衡的条件,保护将支路2电流校正到1母上之后,大差及各母线小差差流均满足条件,所以将支路2自动校正到1母上运行,1母故障时支路2能够正确跳闸出口。方式5,支路2刀闸位置丢失引起的大差差流为0.3 A,不满足大差平衡的条件,直接跳出校正逻辑,所以1母故障时,支路2未跳闸。
表2数据与表1相同,保护校正逻辑平衡校验结果与表1相同,方式3、方式4正确校正到1母上,2母故障时,支路2不会跳闸。方式1、方式2、方式5支路2未跳闸说明校正逻辑未误校正到Ⅱ母上,表1和表2共同验证了校正逻辑的可靠性。
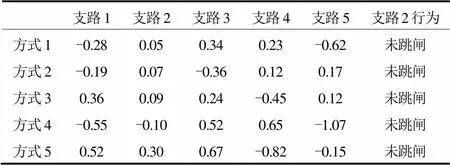
表2 不同方式下Ⅱ母故障时的支路2跳闸行为
4 结论
基于IO差流原理的校正方案的基础是基尔霍夫电流定律,在可靠识别出一次系统无故障,二次回路刀闸位置丢失时,保护通过差流校验平衡原理将丢失刀闸位置的支路校正到其原本应该所在的母线上。该原理能够可靠地识别门槛,灵活地自动跟踪校正门槛,能够可靠解决二次回路中的单个支路刀闸位置异常,防止因刀闸位置异常造成保护远后备越级动作事故[8-10]。基于论文原理的刀闸位置校正方案已经可靠地应用到母线保护产品中,在产品的动模试验中,基于差流平衡原理的刀闸位置校正方案经受了母线故障、振荡、经高阻接地、转换性故障等各种复杂故障的考验。
[1] 周玉兰, 詹荣荣, 舒治淮, 等. 2003年全国电网继电保护与安全自动装置运行情况与分析[J]. 电网技术, 2004, 28(20): 48-53.
ZHOU Yulan, ZHAN Rongrong, SHU Zhihuai, et al. Statistics and analysis of operation situation of protective relaying and automation devices of power systems in China in 2003[J]. Power System Technology, 2004, 28(20): 48-53.
[2] 王同文, 谢民, 孙月琴, 等. 智能变电站继电保护系统可靠性分析[J]. 电力系统保护与控制, 2015, 43(6): 58-66.
WANG Tongwen, XIE Min, SUN Yueqin, et al. Analysis of reliability for protection systems in smart substation[J]. Power System Protection and Control, 2015, 43(6): 58-66.
[3] 侯伟宏, 张沛超, 胡炎. 数字化变电站系统可靠性与可用性研究[J]. 电力系统保护与控制, 2010, 38(14): 34-38.
HOU Weihong, ZHANG Peichao, HU Yan. Reliability and availability study of the digital substation system[J]. Power System Protection and Control, 2010, 38(14): 34-38.
[4] 李芷筠, 戴志辉, 焦彦军, 等. 继电保护可靠性管理系统设计与实现[J]. 电力系统保护与控制, 2013, 41(14): 115-119.
LI Zhijun, DAI Zhihui, JIAO Yanjun, et al. Design and accomplishment of protection reliability management[J]. Power System Protection and Control, 2013, 41(14): 115-119.
[5] 薄志谦, 张保会, 董新洲, 等. 保护智能化的发展与智能继电器网络[J]. 电力系统保护与控制, 2013, 41(2): 1-12.
BO Zhiqian, ZHANG Baohui, DONG Xinzhou, et al. Intelligent relay network for the development of protection[J]. Power System Protection and Control, 2013, 41(2): 1-12.
[6] 吕航, 王风光, 鲍凯鹏, 等. PCS-915母线保护装置[J]. 电力系统自动化, 2012, 36(16): 118-123.
LÜ Hang, WANG Fengguang, BAO Kaipeng, et al. PCS-915 series busbar protection devices[J]. Automation of Electric Power Systems, 2012, 36(16): 118-123.
[7] 尤旦峰, 何雪峰, 李力. RCS-915系列微机母差保护中失灵保护及其双重化方案[J]. 电力系统自动化, 2001, 25(10): 58-60.
YOU Danfeng, HE Xuefeng, LI Li. RCS-915 digital bus and breaker failure protection integration and its dulpex scheme[J]. Automation of Electric Power Systems, 2001, 25(10): 58-60.
[8] 吴刚, 程中普, 郝申军. 智能变电站过程层网络中开关量多设备共享应用方案研究[J]. 电力系统保护与控制, 2015, 43(10): 44-48.
WU Gang, CHENG Zhongpu, HAO Shenjun. Application scheme of intelligent substation switch value multi-device sharing[J]. Power System Protection and Control, 2015, 43(10): 44-48.
[9] 周小波, 汪思满, 吴正学, 等. 环网分布式母线保护装置就地化实现探讨[J]. 电力系统保护与控制, 2015, 43(6): 104-108.
ZHOU Xiaobo, WANG Siman, WU Zhengxue, et al. Local placing implementation research of distributed HSR busbar protection[J]. Power System Protection and Control, 2015, 43(6): 104-108.
[10] 罗慧, 周卿松, 苗洪雷, 等. 基于LMD母线差动保护CT饱和检测方法研究[J]. 电力系统保护与控制, 2015, 43(12): 49-54.
LUO Hui, ZHOU Qingsong, MIAO Honglei, et al. A method for CT saturation detection based on LMD in busbar differential protection[J]. Power System Protection and Control, 2015, 43(12): 49-54.
(编辑 葛艳娜)
Adaptive correction scheme of switch position abnormity of busbar protection
HUANG Jidong, XIAO Feng, WANG Zhiyong, ZHAO Xiaoduo, HU Shasha
(State Grid XJ Group Corporation, Xuchang 461000, China)
This paper analyzes the impact of selectivity and reliability on the bus-bar protection when branch switch position is abnormal, assesses the risk of rejection or malfunction of protection device, and presents an adaptive correction method based on the principle of current vector sum of input current and output current being conservation (referred to as IO differential current). When the large differential current is balanced and only one length of bus-bar small differential IO current is imbalanced, the correction logic starts, protection device will try to add the no-position branch current into the busbar which has small IO differential current, after that if all busbars’ small IO differential current are balanced, this branch will be placed on the corrected busbar compulsively; otherwise, it will try to add to other busbar. A principle of selecting the correction and discrimination threshold of IO differential current used in modifying procedure is introduced. The feasibility of the scheme proposed is verified through simulation analysis.
switch position abnormal; vector sum; IO differential current; correction
10.7667/PSPC150828
2015-05-18;
2015-07-10
黄继东(1980-),男,硕士,高级工程师,主要研究方向为电力系统继电保护产品研发;E-mail: 896462329@qq.com肖 锋(1980-),女,硕士,工程师,主要研究方向为电力系统继电保护研发;王智勇(1978-),男,高级工程师,主要研究方向为电力系统继电保护研发。
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
科学技术创新(2021年14期)2021-05-28
环球市场(2021年13期)2021-01-16
中国电气工程学报(2020年10期)2020-11-06
当代陕西(2019年8期)2019-05-09
电力系统及其自动化学报(2016年11期)2016-12-06
电子测试(2016年8期)2016-07-29
电信科学(2016年9期)2016-06-15
黄河之声(2016年24期)2016-04-22
电测与仪表(2016年13期)2016-04-11
