
航天器GNC系统数学仿真技术研究现状及展望*
2016-04-10 08:00胡海霞董文强
空间控制技术与应用 2016年3期
胡海霞,汤 亮,石 恒,董文强
(1.北京控制工程研究所,北京100190; 2.空间智能控制技术重点实验室,北京100190)
专家约稿
航天器GNC系统数学仿真技术研究现状及展望*
胡海霞1,2,汤 亮1,2,石 恒1,2,董文强1,2
(1.北京控制工程研究所,北京100190; 2.空间智能控制技术重点实验室,北京100190)
总结航天器GNC系统数学仿真技术现状,给出控制系统数学仿真所需具备的4个能力:复杂系统仿真建模、多学科协同仿真、高性能计算和数学仿真平台.对这四个方面未来的技术发展进行展望.
航天器;数学仿真;GNC系统;发展研究
0 引言
航天器最显著的特点是:复杂、昂贵、环境严酷,要求极高的成功率,任何疏忽都会产生不可挽回的严重后果.仿真试验在航天器研制中的重要地位不言而喻,贯穿航天器论证、设计、研制和在轨运行的全寿命周期各个阶段.正是仿真技术的广泛应用,降低了研制成本,提高了航天器发射与运行的可靠性,加快了航天技术的发展进程[1].
制导、导航与控制(GNC)系统作为航天器的核心分系统,是决定航天器任务成败的关键之一.数学仿真技术在完成航天器GNC系统设计重任中发挥着不可或缺的作用,检验方案设计和控制算法是否满足用户提出的功能和技术指标要求,以及在反复迭代和优化过程中最终确定姿态轨道控制算法均离不开数学仿真技术.
数学仿真技术水平主要体现在4个方面:a)复杂系统建模的能力:重点包括多体系统动力学建模和仿真方法、航天器扰动动力学建模及仿真、复杂挠性附件耦合建模及仿真等;b)多学科协同仿真的能力:航天器GNC系统数学仿真应当尽量完整地反映航天器不同层次、不同部件的多学科特性,在提高各子系统模型精度的基础上,考虑系统非线性和时变特性的影响,最终实现各子系统间耦合的准确、高效仿真.如液体晃动的姿态控制闭环仿真、光学-控制-结构集成建模仿真与综合评估等;c)高性能计算能力:通过计算机集群等硬件环境和并行算法相关软件完成复杂控制系统的快速仿真,将仿真任务通过网络分配至多个任务节点,计算能力和效率的大幅提高;d)仿真平台的能力:具备模型管理、方案设计、仿真程序自动生成、仿真报告自动生成的能力,可以实现对复杂控制系统任务的快速仿真验证.
1 航天器控制系统数学仿真技术发展现状与趋势
随着空间系统的复杂程度越来越高,系统规模越来越大,相应的仿真系统也越来越复杂,仿真技术正在受到越来越多的重视.
一方面,MATLAB、SCT(spacecraft control toolbox)、STK(satellite toolkit)等通用仿真计算工具不断拓展,广泛应用于航天器研制过程的理论分析和工程实施中.另一方面,美、俄、欧洲等的宇航部门和企业投入了大量资源用于航天器系统仿真技术方面的基础性研究,所建立的仿真系统在航天器GNC系统研制的各个阶段发挥着重要作用.美国NASA A-mes研究中心开发了为支持多任务平台而设计的集成仿真工具MSF[2],用户可以根据自己任务需求选择适合的组件.MSF的特点包括:(1)提供不同水平自主性和可靠性的研发框架;(2)易于集成仿真中的自主模型和工具;(3)易于扩展到多个机器人平台及环境;(4)允许真实硬件与仿真组件互换;(5)采用了HLA(high level architecture)技术,支持分布式仿真[3].
XMM-Newton任务是欧空局下一代科学研究项目的基石[4].XMM任务的复杂性及其任务需求意味着所有接口与组件系统在集成前必须进行测试,不但要保证航天器平台正常工作,而且需要尽量增加有效的载荷观测时间.XMM仿真系统GNC仿真特点:(1)为不同观测场景生成真实的仿真数据; (2)通过不同载荷和组件的全物理描述完成仿真数据生成;(3)可以基于载荷成像的仿真分析,规划、监视和评估各分系统精度;(4)具备全部图形用户仿真界面.
伽利略系统仿真程序GSSF能再现伽利略航天器导航系统的功能和性能运转状态,支持伽利略卫星系统的定义、集成、确认、验证及运行的完整阶段[5].GSSF的仿真特点包括:(1)姿轨控与导航服务耦合仿真、联合分析;(2)地面段控制策略-空间段自主运行策略-环境模型联合仿真;(3)兼顾考虑星座全周期构型设计、在轨运行维护的需求;(4)强大的导航数据模拟生成功能;(5)提供丰富的仿真和可视化接口.
针对编队飞行,姿轨控耦合系统的控制存在的困难.NASA喷气推进实验室(JPL)开发了FAST平台[6]以提供高可靠的工程仿真,其特点包括:(1)仿真系统可升级、可适应、可配置,以匹配飞行器队形组成的快速改变与演化,满足不同可靠性要求; (2)可以专门研究编队飞行航天器的同步、数据融合、星间通信、星间感知、编队构型鲁棒性等问题; (3)具备多航天器并行仿真能力;(4)可以设计验证多航天器端到端的运行状况与编队飞行精度.
EuroSim是荷兰航天机构研发的可配置仿真工具[7],通过人在回路或者硬件在回路中的实时仿真,在可行性、工程化、样机、转移测试以及操作培训的每个阶段都能发挥作用,具有以下特点:(1)软件移植性和替换性强,可实现代码实时、并行化运行; (2)具有客户/服务器的体系结构;(3)支持动态实时规划仿真资源;(4)软硬件接口丰富,也可以方便实现分布式网络仿真;(5)在UNIX和Wintel平台上都能运行.
总结多个国外实际案例,可以看出,当前国外的数学仿真工具普遍具有跨平台/跨语言支持、多学科协同、跨流程覆盖、分布式/并行计算、实时/交互计算、代码自动生成、虚拟现实演示以及图形化建模等技术特点,如表1所示.

表1 国外航天器GNC领域典型仿真工具的特点Tab.1 Recent spacecraft GNC simulation systems and their featuring techniques
综上所述,近年来航天技术应用需求迅速扩展,航天器及其控制系统的状态越来越复杂,仿真试验的范围和深度迅速提升,航天器控制系统仿真试验方法也同时取得了长足进步.未来的发展方向主要体现在:1)在完善仿真模型的基础上,满足多工况、大规模、多学科、跨流程仿真分析的需要;2)基于富有弹性的综合仿真系统框架,建立围绕控制系统设计的集成仿真和综合评估环境;3)应用高性能计算、协同互操作和动态化调度等技术,支持分布式、跨平台协同设计、仿真和试验验证;4)按照规范化研制流程和现代工程管理方法,建立通用化数学仿真平台,提升仿真技术集成以及质量控制能力.
2 复杂系统仿真建模技术
模型是实际系统与仿真试验之间的纽带,随着对仿真精度和全面性要求的提高,准确、合理、规范的建模已成为仿真工作的基础和必然要求.现代航天器规模正变得庞大、结构越来越复杂,往往带有多个大型柔性附件、运动部件,同时具有多级控制和变结构的特征.其动力学特性的复杂性和高精高稳、超静平台的要求是早期简单的航天器无法比拟的.在这样的背景下,采用精细化模型的控制系统仿真是较为突出的需求之一.另外,通过有效的建模工作,采取适当的模型变量,有助于在提高仿真精度、保证数值稳定和提高计算效率之间取得平衡.
2.1 多体系统动力学建模
为了更为真实地模拟机构的实际工作状态,在多刚体系统建模理论已经成熟的情况下,刚柔耦合多体系统动力学建模成为了多体动力学建模的重点,主要研究柔性体的变形与其大范围空间运动之间的相互作用或相互耦合,以及这种耦合所导致的动力学效应.
迅速而正确地建立系统动力学方程,尤其是建立便于计算机进行数值求解的通用性较强的动力学方程非常重要.多体系统动力学建模大致分为分析方法和矢量力学方法[8],目前已形成了Kane方程、变分方法、旋盘矩阵方法及单向递推组集方法等多种方法.上述方法成为广泛应用的航天器建模理论的同时,还促使人们更加重视对高效建模方法的研究.提高建模效率的方法包括[9]:(1)选取高效的描述变量;(2)计算量与系统自由度数成正比的建模方法,即O(n)算法;(3)基于计算机自动的组集系统动力学方程方法(ADAMS正是自动组集方程的代表);(4)符号推导方法.
数值计算是建立和分析多体系统数学模型的有效途径.目前,流行的以多体动力学为主要算法的CAE软件有ADAMS、SIMPACK和RecurDyn等.根据自身任务需求特点,国外航空航天机构也开发了专用的动力学软件,主要的动力学软件信息汇总如表2[9].

表2 国外主要机构多体系统动力学软件Tab.2 Multibody dynamics software developed bymain foreign research institutes
2.2 航天器扰动动力学建模
为了实现复杂航天器甚高精度姿态控制指标,航天器扰动动力学建模非常重要.国外对星上微振动扰动已进行了深入的研究,“哈勃”太空望远镜已发现在轨扰动引起的颤振响应频率范围包括0~10 Hz的低频颤振和10~500 Hz的高频颤振[10];日本的ALOS卫星专门安装了ADS和加速度计用于在轨测量高频抖动,实现了10-6度量级抖动角度的在轨测量[11].通过微振动在轨实验和大量地面实验,高精度航天器典型微振动扰动归纳如表3所示[12].
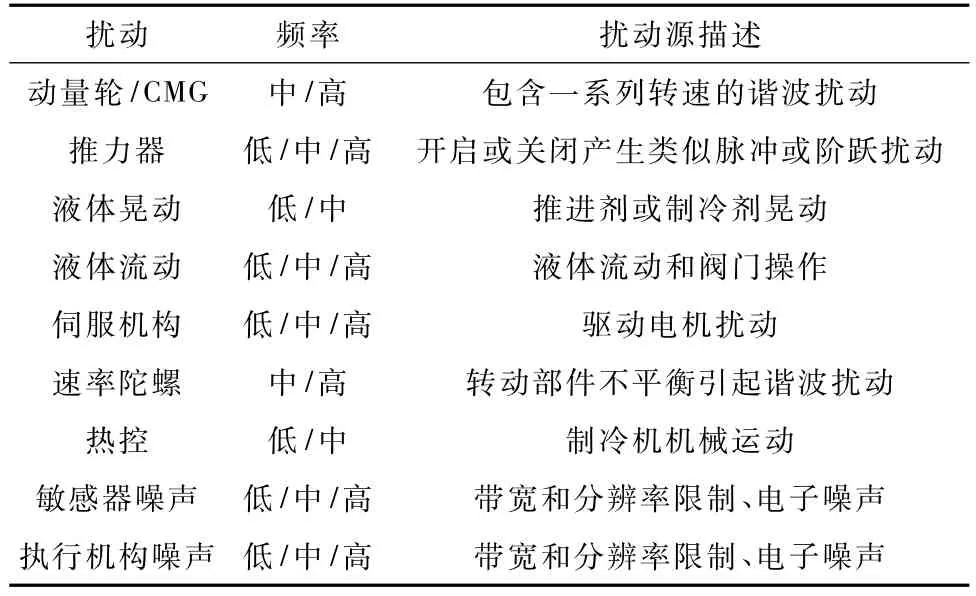
表3 高精度航天器典型微振动扰动列表Tab.3 Typical micro vibration sources of high precision spacecraft
通过分析星上微振动扰动源,扰动建模具有以下特点:
(1)扰动模型要准确描述扰动的实际情况,确保系统性能评估和设计正确.
(2)扰动描述的三要素:频率范围确定结构可能激振的模态以及控制系统的带宽;幅值级别确定进入结构的能量多少;位置和方向确定频率范围内可激励的模态区域.
(3)扰动包括确定性扰动和随机扰动两种类型.伺服机构可产生确定性扰动.而由于机电系统的噪声会产生随机分量,从而产生随机扰动.
(4)大部分外扰动会造成内扰动,而且外扰动通常表现为力矩形式.姿态控制系统执行机构在抵消这些外部扰动时,也会产生附加的不期望的力和力矩,通常在高频段.
(5)外扰动产生的内扰动完整模型很难建立,如忽略外扰动,则需根据实验数据假设内扰动典型时间历程.如果扰动本质上是随机的,则可考虑采用随机过程理论来建模和分析这类干扰.
帆板驱动、帆板振动、天线驱动、热-结构耦合等因素对航天器姿态运动具有不可忽略的影响,而且此类问题具有普遍性.从哈勃望远镜、UARS卫星等相关研究经验来看[13],以太阳帆板为代表的复杂挠性附件耦合动力学仿真面临的难点包括:刚柔耦合、热-结构耦合和机电耦合动力学及分析.该类问题可以归结为多物理场耦合作用下的复杂多体动力学系统的同步求解问题.问题的解决需要通过数学建模来刻画复杂系统在“刚体运动-柔性振动-机电驱动-热环境”的耦合关系,并对其数值求解以模拟其动力学行为,为航天器控制系统分析和设计提供参考.
目前很多商业软件都能够提供附件在多物理场耦合作用下的动力学建模和仿真解决方案,且各有优势,如:ADMAS应用成熟、市场份额最大,Recur-Dyn求解速度最快,COMSOL在多物理场耦合具有优势,SAMCEF Mecano可以同时考虑非线性有限元、接触、摩擦、热、机构运动和控制等因素,实现非线性刚柔耦合分析,如图1所示[14].如果清楚了解多物理场耦合动力学模型,并且掌握有效的解算方法,也可以自行开发适合特殊需求的仿真环境.
3 多学科协同仿真技术
上世纪70年代以来,国内外相继推出多种支持复杂航天器动力学分析的软件系统,如NASTRAN、DYTRAN、DISCOS和ADAMS等,开展了专门的多学科仿真分析.步入90年代以后,出现了在航天器动力学分析中分别建立不同部件、不同学科模型,通过模型间的集成,构建复杂航天器多学科仿真平台的仿真方法.其中,以“液体-挠性-控制”和“光学-控制-结构”两大类多学科集成仿真需求最为突出.
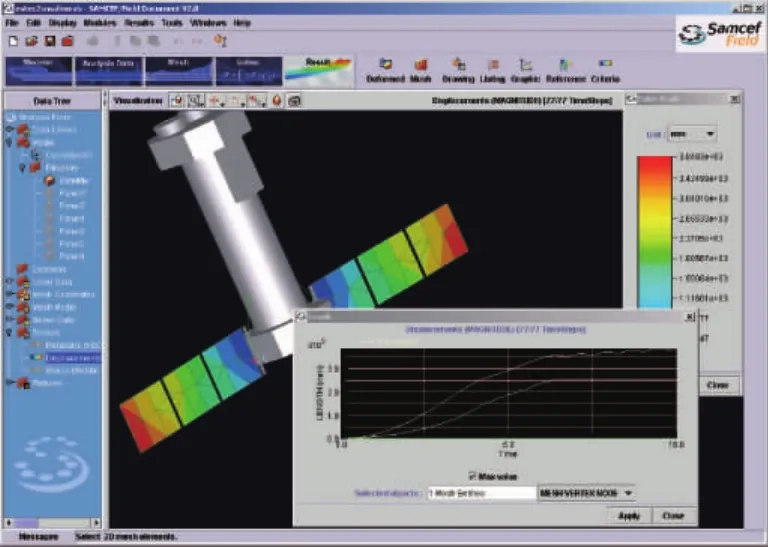
图1 SAMCEF Mecano分析太阳帆板展开热-结构耦合Fig.1 Application of SAMCEF Mecano to solar panel deployment thermal-structural analysis
3.1 液体晃动建模及其与姿态控制集成仿真
对于同时具有超稳定和敏捷机动两方面要求的航天器平台来说,考虑微重力条件下液体晃动的航天器闭环姿态仿真已成为高性能航天器的必要需求[15].如有些低轨敏捷航天器要求机动过程中成像,需要采用计算流体力学方法将液体推进剂划分为大量网格进行离散求解,或采用有限点集方法进行计算,同时完成计算流体力学软件与姿态控制系统的联合闭环仿真,旨在获取航天器在轨动力学特性和验证控制性能.
具体实施从提高液体晃动动力学建模的认识水平和精度开始,进而在控制系统仿真件设计层面进行控制器调整,详细分析液体晃动对执行机构控制能力、视线指向和稳定性的影响,同时在整星系统层面分析贮箱技术、安装位置和执行机构种类的选型设计.如图2所示,模型耦合仿真在联合仿真框架下进行[15],目标是实现控制系统仿真和流体力学(FD)间的耦合仿真.这种数值耦合仿真对于新工况的控制器设计验证十分有用.控制系统和液体力学之间的是耦合仿真经常采用文件交换的实施方式,这样做的好处是可以将整个计算系统分成两个相对独立的部分.两者之间的通信数据率是预设的,而内部的应用具有较高的计算频率.
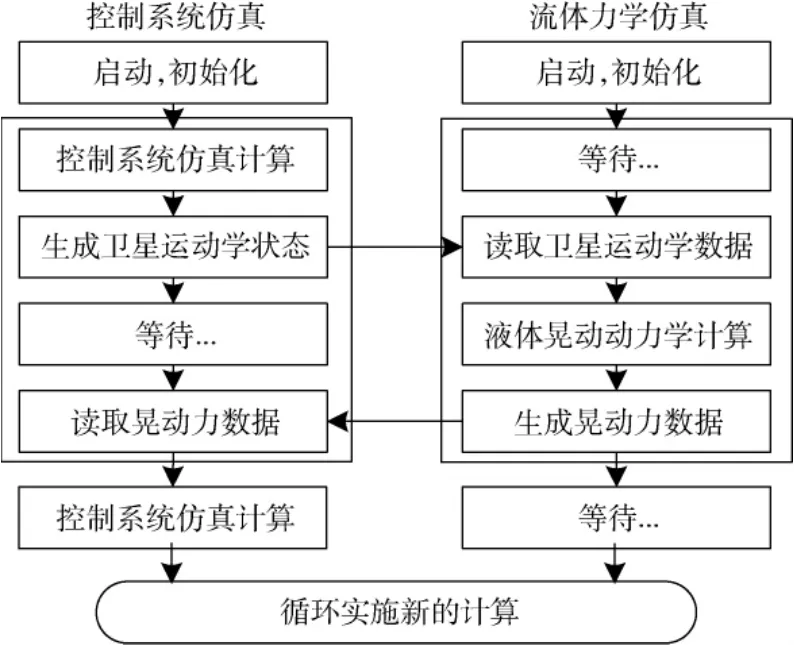
图2 控制系统与流体力学的联合仿真Fig.2 Integrated simulation of spacecraft control system with fluid dynamics
3.2 光学-控制-结构集成建模与综合评估
年青的姑娘们,她们三两成双,坐着马车,去选择衣料去了,因为就要换春装了。她们热心地弄着剪刀,打着衣样,想装成自己心中想得出的那么好,她们白天黑夜地忙着,不久春装换起来了,只是不见载着翠姨的马车来。
大型高精度遥感航天器、航天器超静平台的设计任务需要对数百万自由度的整星级有限元模型进行宽频结构动力学分析,以确定星上微振动源引起的图像质量下降情况.以往的姿态控制性能指标主要包括控制精度、稳定度等,但空间相机所关心的指标,如抖动引起的调制传递函数下降量、曝光时间内的像移量等很难与控制精度、稳定度等指标建立起直接的联系.从保证图像质量出发,应以光学相机关心的性能指标作为最终评价标准,从星上活动部件到图像的传递链路分析,涉及到航天器整个系统设计分析及验证的全过程.
光机系统集成分析方法就是在这种背景下提出的.它是基于光机系统光学系统设计、机械结构设计及分析和自动控制系统设计三大基本模块的常用软件,建立各自相对独立的模型,由计算机程序将三者有机地联系起来,构成一个扰动-光学-控制-结构(dynamics optics controls structures,DOCS)集成模型,用以对各模块之间的相互作用及接口进行校验、工作性能分析和优化设计.
3.2.1 国外应用实例
NASA“起源计划”中,由于Nexus、SIM、JWST和TPF等航天器结构复杂,且光学分辨率要求很高,NASA委托麻省理工学院(MIT)为此建立了一套DOCS综合建模和综合评估分析软件[16].该软件完全用MATLAB开发,实质上是MATLAB的一个工具箱(Toolbox).为了相似的目的,喷气推进实验室(JPL)开发了光学系统综合建模工具箱 IMOS(integrated modeling of optical systems),并已用于 SIM建模[17].近年来,综合建模技术还广泛应用于地面高分辨率望远镜建模分析,如ESA的30 m望远镜系统TMT(thirty meter telescope)和超大望远镜干涉仪VLTI(very large telescope interferometer).
MIT的SSL开发的DOCS基本流程为[16]:
(1)建立并集成各子系统结构、光学、扰动和控制模型,根据模型调整控制系统设计;
(2)进行综合模型预处理和扰动分析,得到标称的系统性能指标;
(3)进行标称性能指标参数化,得到描述这些性能指标的函数模型;
(4)根据性能指标函数模型进行不确定性分析、性能分析、敏感度分析和参数优化分析等.
通过以上步骤,建立整个系统的动力学模型,进行性能综合分析和相应设计改进,实现整体系统性能最优.DOCS方法应用到JWST性能分析和设计,具体方法参见文献[10]和[16].
3.2.2 国内应用情况
在遥感航天器性能评估技术研究方面,国内的主要差距在于缺乏系统级的全面综合分析评估和设计手段.近年来,在相关技术突破和任务牵引下,情况有所改观.
2002年底,北京空间机电研究所与北京理工大学合作开发了“航天光学遥感器仿真系统”,该软件逐渐发展成为“空间光学遥感器集成分析设计工程化软件”(SORSA).SORSA提供一个基于统一平台的光-机-热集成仿真环境,实现遥感器设计与分析过程的规范化与标准化管理,打通各个设计阶段的不同专业间的数据流,实现多专业协同研制,SORSA涵盖的各种核心技术已在“资源一号”红外相机、“环境一号”CCD相机等型号中得到验证和较为广泛深入的应用[17].
北京控制工程研究所针对任务需求开发了扰振源-结构-控制-光学一体化分析软件.该软件集成了扰振源模型、结构动力学模型、控制系统模型以及光学系统模型,能够通过闭环仿真分析得出相机的视线抖动量,实现了扰振源、结构动力学、控制系统、光学系统和时域分析等的预处理、数据读取和仿真参数设定等功能.
4 高性能计算
4.1 高性能仿真任务需求
伴随着航天器技术的发展,不同于传统的采用低阶模型进行的姿态动力学与控制仿真,目前出现了需要将计算流体力学、柔性多体动力学、有限元分析、实时图像处理等大规模计算和数值计算商业软件引入控制系统闭环仿真,对仿真计算速度提出了很高要求,主要表现在以下几个方面:
1)考虑液体晃动的航天器闭环姿态仿真.传统姿态控制系统仿真中采用的低阶航天器液体晃动等效力学模型无法满足在微重力条件下高性能航天器的仿真需求,如要求机动过程中成像,需要采用计算流体力学方法将液体推进剂划分为大量网格进行离散求解或采用有限点集方法进行计算,同时完成与姿态控制系统的联合闭环仿真,获取航天器在轨动力学特性和验证控制性能.如 FPM(finite particle method)等计算流体力学软件嵌入控制系统闭环仿真.
2)航天器超静平台分析验证.航天器超静平台设计任务需要对数百万自由度的整星级有限元模型进行宽频结构动力学分析,以确定星上微振动源引起的图像质量下降情况,其中需要完成大规模结构特征值求解运算、控制-结构-光学一体化联合仿真分析等.
3)大型展开附件的动力学与控制仿真.未来高性能航天器的有效载荷包含超大口径可展开天线、空间桁架结构等大柔性附件,控制稳定度要求高,控制系统方案设计时需要进行柔性多体动力学与控制的联合仿真,以确定展开过程、正常模式的控制性能.
4)三维仿真验证.未来空间操作机器人控制系统方案的设计中需要进行多目视觉、多臂协同的动力学与控制仿真,其中包含了大量的图像处理和特征识别、联合体动力学仿真、防碰撞轨迹规划等,需要三维数字化的仿真结果输出.
4.2 高性能计算仿真系统关键技术
1)体系架构.作为高性能计算硬件设施的核心,现代高性能计算机的发展从20世纪70年代的向量计算机开始,先后出现过MPP大规模并行处理机、Cluster集群系统等多种主体的体系架构.其中,计算机集群(简称集群、Cluster)是一种计算机系统,它通过一组松散的计算机软件和/或硬件连接起来高度紧密地协作完成计算工作.集群系统中的单个计算机通常称为节点,通过内部网络连接.高性能计算集群采用将计算任务分配到集群的不同计算节点而提高计算能力.相比于MPP等一些专有高性能计算系统,集群系统具有明显的优势,包括:集群的标准化程度高、可扩展性好、性价比高.
2)处理器及操作系统.处理器是高性能计算机的核心,很大程度上决定了高性能计算机的计算性能.随着 GPU、Intel MIC等加速器/协处理器的出现,CPU不再是高性能计算领域计算单元的唯一选择.相比于CPU,这些协处理器的浮点运算能力更强、任务处理模式更简单,非常适合部分高性能计算应用.随着开放标准的集群架构逐渐兴起,Linux操作系统被逐渐成为高性能计算机的主流.Linux的操作系统的稳定、安全、可靠、高效率、多用户、开源等特征,尤其它的多用户特征,非常适合高性能计算机的使用模式.Linux操作系统已占到高性能计算90%以上的市场份额.
3)并行计算.为使仿真系统能够最大限度的支持并行化运算,需要利用并行化编程的思想,建立支持并行计算的仿真模型及仿真程序.从进程或线程的交互方式角度划分,并行编程模型主要有共享内存编程模型(share memory)和消息传递编程模型(message passing).共享内存编程模型一般应用在共享内存体系结构上,用于节点内部并行计算;消息传递编程模型主要应用在分布式内存体系结构下,用于多节点间的并行计算.当前高性能集群都是多层次结构,使得集群系统同时具备了共享内存和分布式共享内存两种体系结构的特点.因此,目前进行并行化编程建模时多采用融合了两种架构体系的MPI+OpenMP的混合编程模型.
5 数学仿真平台
航天器GNC系统仿真需求的不断的发展,一方面需要针对复杂航天器建立更加精确、可靠的动力学模型与控制算法,另一方面也对航天器数学仿真平台提出了新的挑战.国际上目前流行基于仿真模型的设计理念,采用代码自动生成技术,从而建立可以快速、准确进行仿真验证的通用平台,为航天器设计提供强有力的支持.
本文给出欧洲航天局(ESA)的SMP2仿真系统和中国航天器姿态轨道控制系统数学仿真系统AOCS的研制情况.他们均以仿真模型规范化和仿真接口标准化为基础,采用了系统仿真软件自动生成技术,实现数学仿真软件的自动化,改变了原有的仿真软件人工编程的模式,能够根据不同的应用目的和不同用户需求,实现仿真的重新配置和快速组合.
5.1 SMP2仿真系统
2004年,ESA建立了仿真模型可移植性标准(simulation model portability standards 2.0,SMP2),现已成为 ESA的仿真模型建设规范,很多仿真平台例如 EuroSim、SimSat、Rose等都已经支持 SMP2标准[18].
SMP2仿真系统开发分为4个阶段:设计、开发、集成与运行.设计阶段基于对研究系统的分析设计出相应的SMP2模型设计文档(Catalogue);开发阶段在由Catalogue生成的框架代码的基础上,填充相应的算法;集成阶段基于装配文件(Assembly)和调度文件(Schedule)实现模型实例的生成和集成;运行阶段将生成代码编译成 DLL文件,与 Assembly、Schedule等一起由仿真器调度运行,SMP2仿真系统开发流程如图3所示.
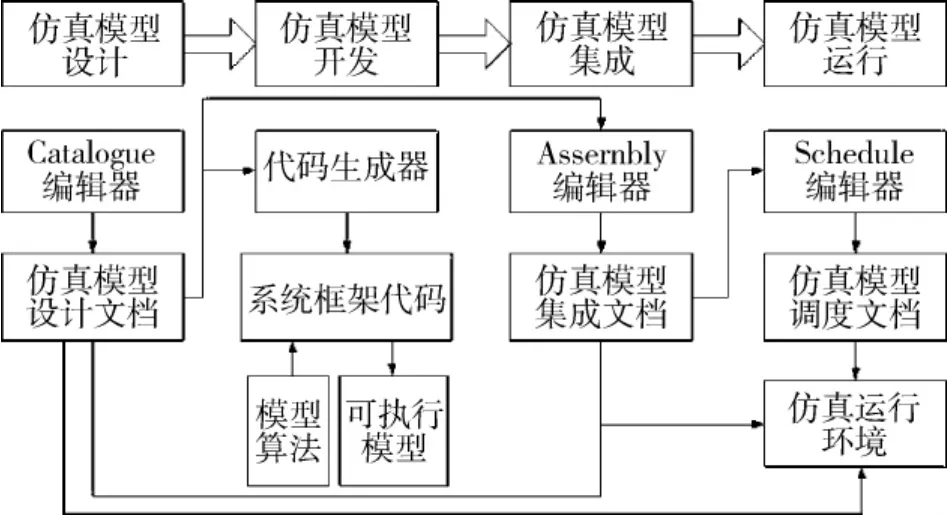
图3 SMP2仿真系统开发过程Fig.3 Procedure of SMP2 simulation system
5.2 AOCS数学仿真系统
复杂多体航天器的任务需求越来越多,难度越来越大.为了提高仿真基础能力,北京控制工程研究所充分利用先进的计算机技术、网络技术,经过多年的努力研制出具有通用性、使用方便、高效的航天器姿态轨道控制数学仿真系统AOCS.
该系统在仿真模型规范化和仿真接口标准化基础上,突破了系统仿真软件自动生成技术,具有可视化组态建模、系统仿真软件自动生成、仿真结果三维可视化演示等功能,模型和接口标准化,显著提高了航天器控制系统工程设计与仿真验证的基础能力.
AOCS仿真系统包括服务器和客户端,服务器上运行航天器姿态轨道控制系统仿真模型库、仿真模型描述文件编辑器;客户端上运行航天器姿态轨道控制系统建模平台.AOCS仿真系统的主要功能是利用规范化的地面仿真模型,在客户端通过可视化的建模方式对航天器的系统组成进行配置,配置完成后仿真系统自动匹配各模型的输入输出关系,快速建立仿真框架自动生成VC仿真程序源代码.
客户端的仿真程序开发环境如图4所示,当用户在视图中进行操作时,如选中视图中的根目录或者视图中点击鼠标,将模型从模型库窗口拖放到主视图中,软件获取被拖放模型的服务器路径,将模型的描述文件下载到本地临时目录,然后解析模型描述文件,创建一个列表的项目表示模型的一个新实例.

图4 航天器姿态轨道控制系统仿真建模平台示意图Fig.4 The spacecraft attitude&orbit control system simulation platform(AOCS)
该系统不但实现了现有航天器姿态轨道控制系统仿真模型的规范化和统一管理,确保仿真模型的正确无误、质量可靠,而且实现了数学仿真过程的规范化、数学仿真技术状态受控可追溯和数学仿真输出结果的规范化,提高了航天器研制的产业化程度,使航天器姿态轨道控制系统方案设计和数学仿真验证能力跨上了一个新台阶.
6 结论
随着空间任务需求的不断变化和科学技术的快速发展,航天器技术经历了从试验到应用、从结构简单到结构复杂、从任务单一到任务多样的发展过程,对平台的控制精度、敏捷性、自主能力、强适应性、性价比等提出了更高的要求.航天器控制系统数学仿真技术作为系统方案验证的重要手段在过去十多年里有了长足的发展,但是为了满足空间任务仿真验证更高的需求,我们必须加快航天器数学仿真技术的研究步伐.需要从提高仿真模型的精细度、保真度、规范化等多个方面来推动高精度数学仿真模型的建立和完善,围绕仿真建模和多学科协同仿真,以高性能计算技术为提升手段,打造数字化仿真平台,提高航天器GNC系统数学仿真的基础能力,更好地为航天器研制任务服务.
[1]包为民.对航天器仿真技术发展趋势的思考[J].航天控制,2013,31(2):4-8.BAO W M.The development trend of aerospace craft simulation technology[J].Aerospace Control,2013,31 (2):4-8.
[2]RABELO L,SALA-DIAKANDAS,PASTRANAJ,et al.Simulation modeling of space missions using the high level architecture[J].Modelling and Simulation in Engineering,2013:1-12.
[3]ST-PIERRE J,MELANSON P,BRUNET C,et al.Simulation for the validation of mission plans[C]//53rdInternational Astronautical Congress.Paris:IAF,2002.
[4]LUMB D H,SCHARTEL N,AND JANSEN A F.X-ray multi-mirror mission(XMM-Newton)observatory[J].Optical Engineering,2012:51(1).
[5]SCHLARMANN B K,LEONARD A,KRAG H,et al.Simulation facilities and testbeds for GALILEO[C]// 53rdInternational Astronautical Congress.Paris:IAF,2002.
[6]WETTE M,SOHL G,SCHARF D,et al.The formation algorithms and simulation testbed[R].2ndInternational Formation Flying Symposium,2004.
[7]DE VRIES R H,NEEFS M J.Real-time simulation for the ATV test facilities[C]//AIAA Modeling and Simulation TechnologiesConference.Washington D.C.: AIAA,2000.
[8]洪嘉振.计算多体系统动力学[M].北京:高等教育出版社,1999.HONG J Z.Computational multibody system dynamics[M].Beijing:Higher Education Press:1999.
[9]SCHIEHEN W.Recent developments in multibody dynamics[J].Journal of Mechanical Science and Technology,2005,19(1):227-236.
[10]STONE C M,HOLTERY C.The JWST integrated modeling environment[C]//IEEE Aerospace Conference Proceedings.New York:IEEE,2004.
[11]IWATA T.Attitude dynamics and disturbances of the advanced land observing satellite(ALOS):modeling, identification,and mitigation[C]//AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Washington D.C.:AIAA,2008.
[12]MASTERSON R A,MILLER D W,GROGAN R L.Development and validation of reaction wheel disturbance models:empirical models[J].Journal of Sound and Vibration,2002,249(3):575-598.
[13]NAMBURU R R,TAMMA K K.Thermally induced structural dynamic response of flexural configurations influenced by linear/nonlinear thermal effects[C]//32ndStructures,Structural Dynamics and Materials Conference.Washington D.C.:AIAA,1991.
[14]SAMTECH公司北京代表.SAMCEF Mecano在航空航天领域的应用[C].第七届中国CAE工程分析技术年会,2011.
[15]THEUREAN D,BUSSET B,BAVESTRELLOH,et al.Integration of low g sloshing models with spacecraft attitude control simulators[C]//AIAA Guidance,Navigation,andControl(GNC) Conference.Washington D.C.:AIAA,2013.
[16]WECK O L D,MILLER D W,MALLORY G J,et al.Integrated modeling and dynamics simulation for the next generation space telescope[J].Journal of Clinical Microbiology,1999,14(3):326-328.
[17]陈维春,杜以强.空间光学遥感器热控系统优化分析功能设计[J].航天返回与遥感,2004,25(2):17-22.CHEN W C,DU Y Q.Function design for optimization analysis in thermal control system of space optical remote sensor[J].Spacecraft Recovery& Remote Sensing,2004,6,25(2):17-22.
[18]雷永林,苏年乐,李竞杰,等.新型仿真模型规范SMP2及其关键应用技术[J].系统工程理论与实践,2010,30(5):899-908.LEI Y L,SU N L,LI J J,et al.New simulation model representation specification SMP2 and its key application techniques[J].Systems Engineering—Theory&Practice,2010,30(5):899-908.
Research and Development of Numerical Simulation Techniques for Spacecraft GNC System
HU Haixia1,2,TANG Liang1,2,SHI Heng1,2,DONG Wenqiang1,2
(1.Beijing Institute of Control Engineering,Beijing 100190,China; 2.Science and Technology on Space Intelligent Control Laboratory,Beijing 100190,China)
A survey on the research and development state of numerical simulation techniques for spacecraft GNC system is presented.Four essential abilities of numerical simulation are proposed:complex simulation system modeling,multi-discipline simulation,high performance computing and simulation platform.Future prospects on the numerical simulation techniques are highlighted based on the four aspects.
spacecraft;numerical simulation;guidance navigation and control;development
V448
A
1674-1579(2016)03-0001-08
10.3969/j.issn.1674-1579.2016.03.001
胡海霞(1977—),女,研究员,研究方向为航天器控制与仿真;汤 亮(1976—),男,研究员,研究方向为航天器动力学与控制;石 恒(1985—),男,工程师,研究方向为航天器控制与仿真;董文强(1982—),男,高工,研究方向为航天器控制与仿真.
*国家重点基础研究发展计划资助项目(2013CB733100).
2015-05-03
猜你喜欢
数学物理学报(2022年5期)2022-10-09
国际太空(2022年7期)2022-08-16
上海师范大学学报·自然科学版(2022年3期)2022-07-11
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年7期)2021-08-13
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
电子制作(2017年19期)2017-02-02
山东工业技术(2016年15期)2016-12-01
