基于伪随机码的微波着陆系统自适应测距方法
2016-04-07 03:47吴德伟赵颖辉
探测与控制学报 2016年1期
韩 昆,吴德伟,赵颖辉
(空军工程大学信息与导航学院,陕西 西安 710077)
基于伪随机码的微波着陆系统自适应测距方法
韩昆,吴德伟,赵颖辉
(空军工程大学信息与导航学院,陕西 西安 710077)
摘要:针对微波着陆系统(MLS)测距与测角功能分别独立工作带来的高复杂度、低机动性的问题,提出了基于伪随机码的自适应测距方法。该方法首先利用测距信号过采样后的欠采样值通过多周期伪码的并行频率搜索完成伪码捕获、多普勒频移精确估计和数据字提取,实现自适应测距;然后通过确定过采样值翻转点实现伪码跟踪,减小测距误差。仿真分析表明伪随机码可以被快速、准确地捕获跟踪,从而验证了方法的可行性。
关键词:自适应测距;并行频域搜索;振幅和相位检测;伪码跟踪
0引言
飞机在进近着陆的过程中需要通过接收地面设备发射的信号确定自身方位、俯仰以及距离信息,进而实现对自身的定位。微波着陆系统是一种先进的地面导航引导系统,具有引导精度高、受地形影响小等优点。但是当前的微波着陆系统只能提供方向引导功能,距离引导功能需要精密测距器DME/P提供,单独的一个系统均不能提供飞机定位所需的全部信息。然而两种功能需要不同的地面和机载设备、工作在不同的频段,系统复杂度较高,既增加了地面设备的体积,影响了机动性,又增大了机载设备的重量,影响了飞机载荷;而且DME/P工作的L波段电磁兼容影响严重。
为了提高微波着陆系统的机动性,出现了机动式微波着陆系统,该系统比固定式系统更加灵活,但是工作原理与固定式系统相同,并没有改变测角、测距两套系统分别工作的现状。因此,本文针对此问题提出了基于伪随机码的微波着陆系统自适应测距方法。
1伪随机码捕获原理
与全球定位系统(GPS)的伪码相比,询问应答式测距使用的伪码具有以下特点:(1)测距伪码的码字短;(2)询问码的发射是间断的、随机的,伪码接收的起止时间不确定;(3)伪码的捕获和跟踪需同时完成。因此测距伪码的捕获、跟踪需要更快的速度。
传统的伪码捕获方法是在码相位-频率二维方向上进行搜索,捕获速度慢。基于快速傅里叶变换(FFT)和快速傅里叶逆变换(IFFT)的并行码相位搜索[1-6]实现了频率域的一维捕获,但是询问应答式测距中伪码码字短且进入接收机的起止时间不确定,导致进行FFT的采样段不能确定,因此该方法的捕获效果并不理想。基于部分匹配滤波器-快速傅里叶变换(PMF-FFT)的并行频率搜索[7-13]实现了码域的一维捕获,但是对频偏的估计是离散的。加窗FFT和全相位快速傅里叶变换(all-phase FFT , apFFT)[14-17]可实现频偏的精确估计,但是均没有考虑数据字翻转的影响。以上几种方法虽然不能直接应用于询问应答式测距伪码的捕获、跟踪,但是为其功能实现提供了理论和技术基础。
2自适应测距方法
2.1测距伪码
测距伪码的设计需要充分考虑可用工作时间限制和功能要求。根据微波着陆系统工作原理和飞机进近着陆过程中距离信息更新率的要求,在现有工作方式的基础上设计一种码元宽度为Tc=8 μs(信号带宽为250 kHz)、总长为63位的测距伪码。为了在测距伪码上调制数据字,并且保证测距伪码能够被快速捕获、数据字能够被准确提取,将63位的测距伪码分为9组周期为7位的伪码,每个伪码周期由一位数据字调制。伪码采用平衡Gold码,7位平衡Gold码如表1所示。
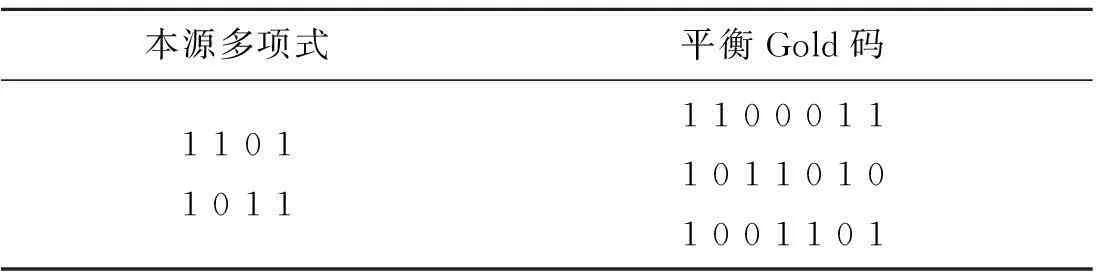
表1 7位平衡Gold码
9位数据字将飞机的飞行信息传送至地面设备。第一位为固定位,用于数据字提取;第二、三位为功能识别码,指出该段数据字的功能;最后一位为奇偶校验码,用于数据字校验;中间六位为信息位,提供飞行信息。
2.2测距初始阶段的伪码捕获
由于询问码和应答码到达接收机的起止时间不能提前确定,因此测距时隙内伪码捕获的过程一直在进行直至系统转入到其他功能时隙。测距伪码的捕获过程如图1所示,其中N*为大于N的2的最小次幂。
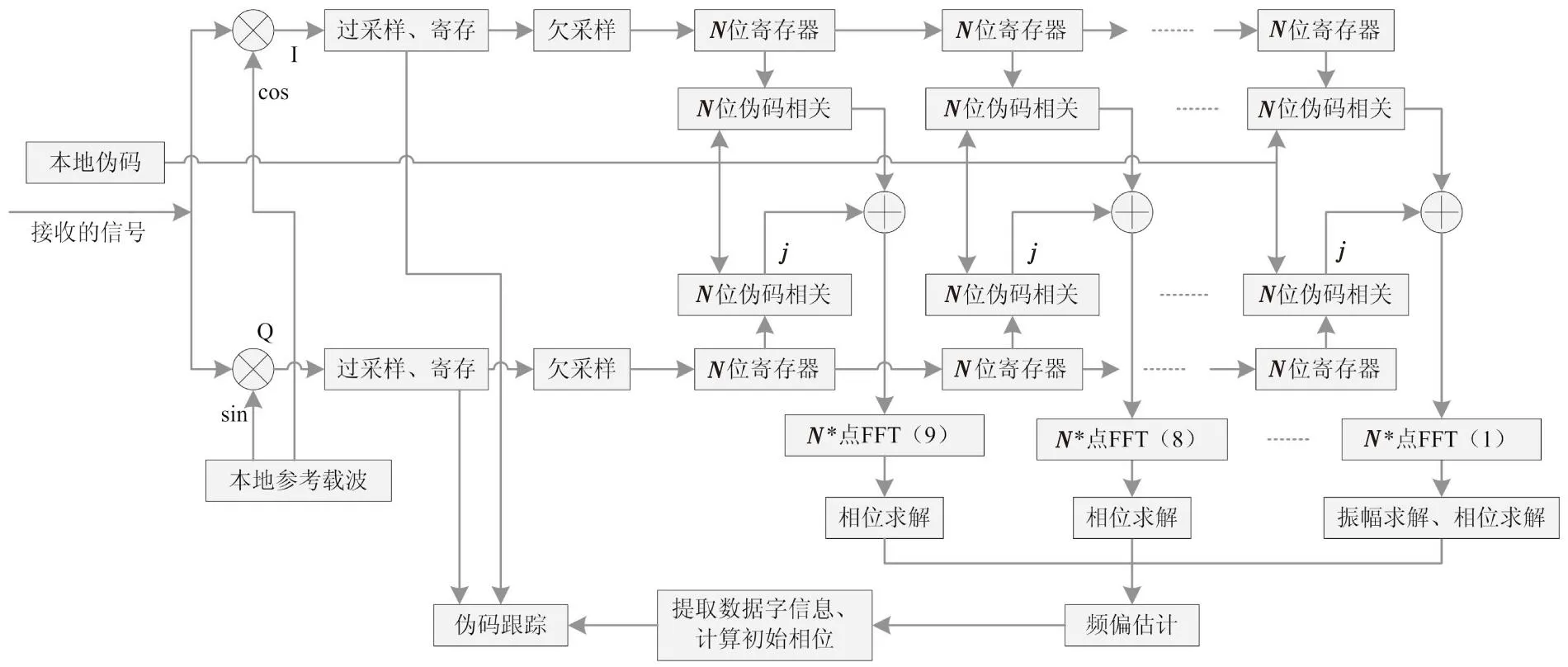
图1 测距伪码捕获、跟踪过程Fig.1 Acquisition and tracking process of ranging PN code
以测距信号到达接收机的时刻为t=0时刻。当系统采用码1001101为1架无人机提供自适应引导时,暂时不考虑噪声的影响,地面设备接收到的测距询问信号可表示为:
(1)
其中,Ps为接收信号的功率,d(t)为数据码,c(t)为测距伪码,ω0为载波频率,ωd为多普勒频移,φ为接收到的测距信号在t=0时刻的初始相位。
本地参考载波频率为ω0,接收信号经过本地下变频、滤波后变为中心频率为ωd、带宽为1/Tc(单边)的信号。对该连续信号先以周期Ts进行过采样,再对过采样点以周期Ts进行欠采样,初次过采样、欠采样时刻与本地参考载波初始时刻严格同步。一个伪码周期欠采样后包括N=(7·Tc)/Ts个采样点,则在每一时刻同时进行伪码自相关的包括M=9·N个采样点。采样后的I路信号可表示为:
(2)
Q路信号可表示为:
(3)
其中,φa为采样时刻不确定引起的采样点初始相位。
设在时刻T所有采样点伪码与本地伪码匹配,则第g(1≤g≤9)个N*点FFT结果为:
(4)
θg=ωd·(g-1)·N·Ts-ωd·Ts+φa
(5)
(6)
(7)
其中,φg为dg对Cg(k)相位值的影响,当dg=1时φg=0,当dg=-1时φg=π。

图2 测距伪码成功捕获时归一化振幅Fig.2 Normalization amplitude of ranging PN code when captured successfully
设测距伪码成功捕获时第g个N*点FFT的结果中第kg个频点处的振幅满足判决要求,对Cg(kg)求相位可得:
(8)
相邻两个相位值Φg、Φg-1之差为:
(kg-kg-1)+φg-φg-1
(9)
由式(9)可以看出ωd与ΔΦg具有一一对应的关系,当g≥2时可以对ωd进行精确解算。微波着陆系统工作波长λ≈6cm,进近着陆的无人机相对于地面设备的速度通常小于音速,设最大速度vmax=330m/s,此时的多普勒频移ωd≈2π·v/λ=11 000π(s-1)。由图2可知在k=0频点处得到振幅最大值,此时一个伪码周期产生的最大相位偏差为0.616 0π。由于Φg∈[-π,π],ΔΦg可能会出现相位模糊的情况,因此在求解ωd之前需要对ΔΦg进行π倍相位校正使得ΔΦg∈[0,π]。
由式(8)可以得到两组(φa,d1),进一步通过数据码的第一位固定位可以得到确定的采样点初始相位φa,从而提取数据字信息。
2.3测距初始阶段的伪码跟踪
成功捕获时测距最大误差为0.5Ts·C(C为光速),误差较大,需要对测距码进行跟踪。设第h次欠采样后成功捕获测距信息,根据伪码特征,第(h-126)·64+33至(h-124)·64+32个过采样点之间存在第一、二位伪码的翻转,确定该翻转点的位置可以实现测距伪码的跟踪。翻转点确定方法简述为:1)利用ωd·[(h-125)·64+32]·TS+φa确定采样点,当其位于[π/4,3π/4]∪[5π/4,7π/4]时选取Q路采样点,否则选择I路采样点;2)依次对相邻的两个采样点求均值;3)对均值进行分析,在均值趋势发生变化的区域选取均值最接近0的点作为第一、二位伪码翻转的位置。
2.4自适应伪码捕获、跟踪
通过测距初始阶段的测距询问信号,机载设备将无人机实时的飞行数据传至地面,地面设备利用接收的数据以及已知的坐标关系对无人机进行定位、定速。通过初始阶段的积累,从某一次测距询问信号的捕获开始,地面设备对无人机的位置和速度信息进行一步预测,并将预测的速度信息转换为频偏估计调整本地参考频率。捕获前地面设备的频偏估计可以有效减小接收信号下变频后的中心频率,由图2可以看出,中心频率越小,FFT后的振幅越大,在判决门限和虚捕获概率不变的情况下可以有效增加成功捕获的概率。
3性能分析和仿真验证
3.1性能分析
3.1.1虚捕获概率

(10)
2)设第g(g≠1)个N*点FFT的输入仅为伪码第h-1、h(h≤g)个周期的部分伪码与本地伪码未匹配时的相关序列,则式(3)变为:

exp[j·(θh+ωa·l)]
(k=0,1,…,N*-11≤l≤N-1)
(11)

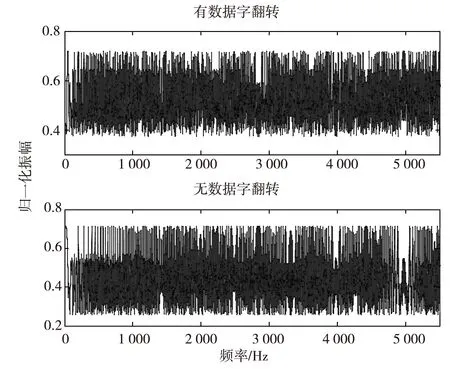
图3 双周期部分伪码输入时归一化振幅Fig.3 Normalization amplitude when partial PN code of two cycles inputted

(12)

3)设第1个N*点FFT的输入仅为测距伪码第1个周期未完全到达时与本地伪码的自相关序列,则式(4)变为:
(13)


图4 单周期部分伪码输入时归一化振幅Fig.4 Normalization amplitude when partial PN code of one cycle inputted

(14)

3.1.2捕获概率

(15)

3.1.3伪码捕获判决标准
测距伪码捕获过程可分为两步:


图5 振幅概率密度曲线Fig.5 Amplitude probability density curve
由图5可以看出,随着Ps的增大,在捕获概率不变的情况下虚捕获概率越来越小,但是需要的发射信号功率越来越高,因此对系统参数的设定需统筹考量。
通过以上两步可以有效减小虚捕获的概率。
3.1.4测距精度的改善
精密测距器DME/P有两种精度标准,标准1适合对常规起降飞机的引导,标准2适合对垂直起降和短句起降飞机的引导。在数据基准点初,标准1、标准2的航迹跟踪误差应分别小于±30m(2σ)、±12m(2σ),控制运动噪声应分别小于±18m(2σ)、±12m(2σ)。
询问应答式伪码测距的测距精度与伪码捕获时的采样率有关。本文中捕获阶段的数据采样周期为4μs,此时的测距误差最大为60m;跟踪阶段的数据采样周期为0.062 5μs,测距误差最大为0.1m。因此,询问应答式伪码测距的精度优于精密测距器的测距精度。
3.2仿真验证
3.2.1捕获过程
为了对捕获过程以及成功捕获后的频偏估计精度进行验证,对采样值分别是噪声、噪声+部分测距伪码和噪声+完整测距伪码的情况分别进行仿真。仿真时设置频偏ωd=6 000π,采样周期Ts=4μs,N=14,N*=16,噪声为均值为0、方差为1的高斯白噪声。
1)当第1个N*点FFT有部分伪码自相关序列输入时,利用第1个FFT的振幅进行初捕获,利用第1至8个FFT的相位值进行捕获验证和频偏估计。图6为初捕获时判决门限Th=0时的频偏估计值,其中(a)是8个数据字均为+1时的估计结果,(b)是8个数据字依次为-1、-1、+1、+1、+1、-1、-1、+1时的估计结果。图7为第一个FFT的归一化振幅。
由图6(a)可以看出,在无数据字翻转时,随着信号功率的增大,由第3至8个FFT的相位值得到的频偏估计趋于稳定并且接近真实频偏;当第1个FFT中伪码自相关位数为6、9、10、11、13时,由第2、1个FFT的相位值得到的频偏估计与第3至8个FFT的相位值得到的频偏估计接近,此时无法仅仅通过频偏估计对虚捕获进行辨别。由图6(b)可以看出,当数据字翻转时,通过FFT的相位值得到的频偏估计与数据位翻转的方式和位置有关。由图7可以看出所有的归一化振幅均小于0.5。因此,设定合适的信号发射功率和判决门限,通过振幅和频偏估计的共同判断可以有效减小虚捕获概率。
2)当测距伪码被完整采样时,利用第1至8个FFT的相位值进行频偏估计,可得到4个估计值,仿真结果如图8所示。

图6 采样值为噪声+部分测距伪码时的频偏估计Fig.6 Frequency shift estimation when noise and partial PN code sampled

图7 第一个FFT的归一化振幅Fig.7 Normalization amplitude of 1st FFT
由图8可以看出,随着信噪比的增大,频偏估计值趋于稳定且较好的反映了真实的频偏。
3.2.2跟踪过程
不失一般性,设第126次欠采样后成功捕获测距信号,此时,理论上第129个过采样点处为第一、二位伪码位的翻转点。在Ps=10σ2=10和Ps=50σ2=50的情况下,分别对φa=π/8和φa=3π/8时的跟踪结果进行仿真,结果如图9所示。

图8 采样值为噪声+完整测距伪码时的频偏估计Fig.8 Frequency shift estimation when noise and full PN code sampled
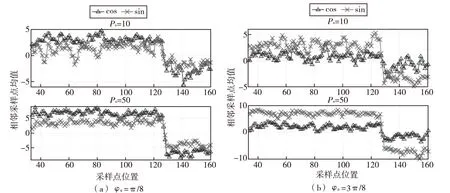
图9 伪码跟踪结果Fig.9 Result of PN code tracking
由图9可以看出在满足信噪比要求的条件下,本文伪码跟踪方法可以较好的实现伪码跟踪功能。理论上,过采样频率越高,伪码跟踪结果越好,但是对硬件的要求越高。
4结论
本文提出了基于伪随机码的微波着陆系统自适应测距方法,该方法通过并行频率搜索与全相位搜索实现了测角、测距功能同设备、同频段完成,仿真分析表明伪随机码可以被快速、准确地捕获跟踪。但是,本文仅就自适应测距的可行性进行了分析,自适应测距时的模型建立、预测方式等将在接下来的工作中进一步研究。为了使微波着陆系统适合大型无人机起降引导需求而对系统测距体制的改进是一项复杂的工程,新的测距体制下系统可以实施单架、多架无人机自适应引导,本文仅就单架引导时的自适应测距功能进行了讨论。单架自适应伪码测距实现方法的研究为复杂情况下伪码测距功能实现方法的研究和实际应用提供了理论参考。
参考文献:
[1]王鹏宇,吕善伟,党群,等.基于码域频FFT的伪码捕获的改进与实现[J].系统工程与电子技术,2008, 30(8):1407-1411.
[2]LI Hong, LU Mingquan, FENG Zhenming. Direct GPS P-Code Acquisition Method Based on FFT[J]. Tsinghua Science and Technology,2008,13(1):9-16.
[3]陈松,黄开枝,吉江.一种基于频域采样的序列快速捕获算法[J].电子与信息学报,2012,34(8):1807-1813.
[4]唐小妹,庞晶,黄仰博,等.XFAST长码直捕算法参数优
化设计[J].中南大学学报(自然科学版), 2014,45(4):1113-1118.
[5]FENG Wenquan, XING Xiaodi, ZHAO Qi, et al. Dual-channel Method for Fast Long PN-code Acquisition[J]. China Communications,2014,5:60-70.
[6]Binhee Kim, Seung-Hyun Kong. Design of FFT-Based TDCC for GNSS Acquisition [J]. IEEE Transactions on Wireless Communications,2014,13(5):2798-2808.
[7]孙斌.基于PMF-FFT快速捕获算法的研究与实现[D].哈尔滨:哈尔滨工业大学,2011.
[8]Liu Chang, Zhang Jun, Zhu Yanbo, et al. Analysis and Optimization of PMF-FFT Acquisition Algorithm for High-Dynamic GPS Signal[C] //IEEE 5th International Conference on Cybernetics and Intelligent Systems,2011,185-189.
[9]LI Chuanjun, YANG Shuxing, JI Zhen. Performance analysis of fast GPS signal acquisition based on PMF and Window FFT[J]. Journal of Beijing Institute of Technology,2012,21(3):291-297.
[10]李文刚,黄鑫磊,刘龙伟.低信噪比环境下的长码捕获新算法[J].西安电子科技大学学报(自然科学版), 2013,40(4):29-36.
[11]姚如贵,冯泽明,赵雨,等. 基于FFT的时频并行捕获算法研究[J]. 西北工业大学学报,2013,31(3):446-450.
[12]占巍,张晓林,李娟.时频域并行捕获算法[J].北京航空航天大学学报,2013,39(5):706-710.
[13]罗海坤,王永庆,罗雨,等.PMF-FFT算法中码多普勒频率影响的分析及补偿[J].北京理工大学学报, 2013,33(11):1176-1182.
[14]黄翔东,王兆华.全相位时移相位差频谱校正法[J].天津大学学报,2008,41(7):815-820.
[15]张涛,任志良,陈光,等.改进的全相位时移相位差频谱分析算法[J].系统工程与电子技术,2011,33(7): 1468-1472.
[16]王松,葛海波.基于全相位FFT的伪码捕获研究[J].计算机工程与设计,2012,33(10):3709-3715.
[17]谭思炜,任志良,孙常存.全相位FFT相位差频谱校正法改进[J].系统工程与电子技术,2013,35(1):34-39.
Self-adaptive Ranging Method of Microwave Landing System Based on PN Code
HAN Kun, WU Dewei , ZHAO Yinghui
(Information and Navigation College,Air Force Engineering University,Xi’an 710077,China)
Abstract:To solve the problems of high complexity and low mobility brought by functions of ranging and direction finding of microwave landing system (MLS) working independently, a self-adaptive ranging method based on PN code was proposed. At first, the ranging signal of under-sampling from over-sampling was used to realize functions of PN code acquisition, Doppler frequency shifted estimation and dates acquisition by parallel frequency searching of multiple cycles PN code, which achieved self-adaptive ranging. And then the system achieved PN code tracking by making turning point of oversampling sure, which could reduce ranging error. Simulations indicated that the PN code could be captured and tracked quickly and accurately, which verified the method feasibility.
Key words:self-adaptive ranging; parallel frequency searching; amplitude and phase detection; PN code tracking
中图分类号:TN820.2
文献标志码:A
文章编号:1008-1194(2016)01-0084-06
作者简介:韩昆(1990—),男,山东潍坊人,硕士研究生,研究方向:飞行器着陆引导与自主导航。E-mail: hk199009@126.com。
基金项目:国家自然科学基金项目资助(61473308)
*收稿日期:2015-09-16