GNSS卫星导航地基增强系统与位置云服务关键技术
2016-04-06 11:47:07黄丁发周乐韬卢建康
西南交通大学学报 2016年2期
黄丁发, 周乐韬, 卢建康, 梅 熙,冯 威, 张 熙, 严 丽
(1. 西南交通大学高速铁路运营安全空间信息技术国家地方联合工程实验室, 四川 成都 610031; 2. 中铁二院工程集团有限责任公司, 四川 成都 610031)
GNSS卫星导航地基增强系统与位置云服务关键技术
黄丁发1, 周乐韬1, 卢建康2, 梅 熙2,冯 威1, 张 熙1, 严 丽1
(1. 西南交通大学高速铁路运营安全空间信息技术国家地方联合工程实验室, 四川 成都 610031; 2. 中铁二院工程集团有限责任公司, 四川 成都 610031)
针对地基增强系统自主研发了高精度增强参考站网络位置服务平台,通过与国际上代表性的平台系统比测,结果表明:网络RTK服务的初始化时间基本一致,相同测试点两个系统的精度相当,均实现了厘米级的RTK定位.北斗与GPS联合数据处理结果表明:联合解的57条基线在X、Z方向均优于1 mm,Y方向优于2 mm.与北斗和GPS单独解算相比,联合解算分别有55条和53条基线精度得到了改善,占总体的96.5%和93.0%.针对大规模CORS网络的多模GNSS数据融合、处理与位置服务问题,提出了建立位置无关服务和资源池的位置云服务的思想,实现数据处理与分析能力共享、多样性服务、广域无缝定位连接,为广域分布式CORS网络的信息获取、共享、处理和分析等提供了全新的理论基础.
GNSS;卫星导航;地基增强;多模GNSS数据融合;位置云;位置服务
全球导航卫星系统GNSS(global navigation satellite system)是卫星无线电导航定位系统的总称,目前代表性的系统包括:美国的GPS、俄罗斯的GLONASS、中国的北斗系统(BDS)和欧盟的GALILEO.从卫星信号结构来看,北斗系统采用与GPS和GALILEO系统相同的码分多址通信方式,GLONASS则采用频分多址方式[1].在数据处理与误差分析方面,BDS可从GPS系统中引用和改进相关的数据处理与误差建模方法.相关研究表明, BDS伪距观测精度已达33 cm,载波相位观测精度约为2 mm[2],BDS系统所具备的兼容与互操作性也将对其他系统的定位与授时服务产生积极影响.
尽管GNSS在基于伪距观测提供标准定位服务(SPS)和精密定位服务(PPS)方面可提供米级水平的位置服务,但在基于载波相位观测的高精度(分米到厘米级)应用方面仍然需要地基增强技术.由于多模GNSS(GPS、GLONASS、BDS、GALILEO)的成功运行,卫星导航系统正向着多模互用及其逐步融合的方向发展,多模GNSS 互用技术必将在系统精度、可靠性和可用性上,对民用卫星导航定位产生重要影响.随着我国北斗二代系统的运行和发展的持续深入,对高精度导航定位服务需求的快速增长,建立高精度卫星导航定位地基增强系统,融合多模GNSS 卫星互用技术的导航定位网络平台理论,面向广域大规模网络位置服务的理论体系已经成为关键的技术.
1 地基增强系统:参考站网络技术
基于分布式连续运行参考站网络CORS(continue operation reference station)是通过连续观测数据的融合处理,实现空间相关误差的精确建模与估计,然后由网络通信进行修正数产品发布,是高精度地基增强GNSS卫星导航的关键技术.网络RTK和PPPRTK均是通过地基增强的高精度定位技术.
目前,多功能GNSS 服务网络的进程正方兴未艾,全面建立满足自身特点的区域多功能、多模融合互用的大规模观测网络,已经成为一种发展趋势.全球导航卫星系统服务网络体系,作为国家空间数据基础设施(NSDI)的重要组成部分,已在我国各部门和区域范围内相继建成并已覆盖我国大部分地区,以满足现代高精度、区域范围内的实时三维空间定位的需要[3].
1.1 网络RTK的关键技术
国际上参考站系统的主要代表有:虚拟参考站(VRS)技术[4]、区域改正数(FKP)技术[5]和主辅站(MAC)技术[6]等.本团队自主开发了“增强CORS网络服务系统(ARSNet/VENUS)”,采用增强参考站技术,提供覆盖区域及其周边一定范围内的厘米级网络RTK服务[7-8],目前已支持北斗、GPS、GLONASS三星系统,如图1所示.
CORS站将原始观测数据实时传回服务器,结合流动站返回的概略位置,服务器将在该位置上精确生成一个虚拟参考站,从而为流动站实现RTK定位服务.因此网络RTK的质量取决于VRS虚拟观测数据的质量,其相位和伪距观测值计算式为
(1)
(2)

Δ为站间单差因子;
λ为载波波长;
φ为相位观测值;
P为伪距观测值;
i、j为卫星编号(i为参考卫星);
A为主参考站;
V为虚拟参考站;
ρ为站星几何距离;
I为电离层延迟;
T为对流层延迟;
O为卫星轨道误差;
M为多路径延迟;
ε为其他观测噪声.

图1 ARSNet/VENUS网络RTK服务系统Fig.1 Network RTK System ARSNet/VENUS
1.2 ARSNet/VENUS与GPSNet的性能对比
自主研发的增强参考站网络系统ARSNet/VENUS已在国内投入广泛应用.为了验证系统的服务性能,选择美国TRIMBLE的GPSNet系统进行比测,以对两套系统的服务质量做比较.测试选取川渝CORS网络为实验区,该网络覆盖川渝两地约25万km2,详细对比了两套系统服务下网络RTK定位的初始化时间和精度.测试确保每个参考站三角单元内大约包含两个测试点,统计得到美国TRIMBLE GPSNet和VENUS系统下测试点的初始化时间和内符合精度如表1、2,趋势图如图2、3所示.
表2中:Pn、Pe、Pu分别为北、东和垂向测试点的精度.
统计表明:
(1) 两套系统网络RTK服务的初始化时间基本一致,相同测试点两个系统在北、东方向上精度基本一致,两套系统均达到了厘米级的定位结果;
(2) 互差结果显示两个系统存在一定的系统性偏差,但在精度范围之内.

表1 测试点初始化时间统计表Tab.1 Statistics on initial time of test points
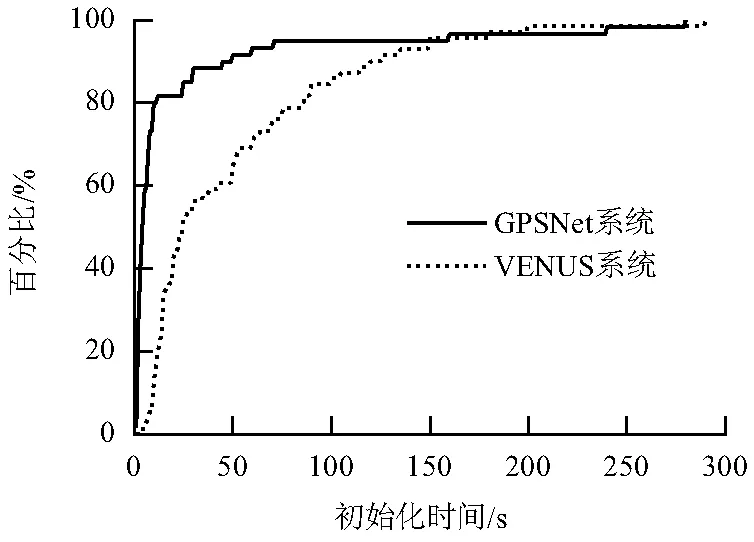
图2 各系统测试点初始化时间对比图Fig.2 Comparison of initial time between GPSNet system and VENUS system

(a)GPSNet系统(b)VENUS系统图3 GPSNet系统和VENUS系统的内符合精度统计图Fig.3 StatisticalgraphsofinnerprecisioninGPSNetsystemandVENUSsystem

表2 GPSNET系统和VENUS系统的精度统计表Tab.2 Statistics on positioning accuracy in GPSNet system and VENUS system
2 北斗与GPS数据融合处理
如前所述,北斗与GPS在信号结构上类似,所以其数学模型基本一致.在星座空间分布上,北斗系统包含有地球静止轨道GEO(gostationary obit)卫星、倾斜地球同步轨道IGSO(iclined gosynchronous obit)卫星和中轨MEO(mdium erth obit)卫星组成.由于空间分布结构的异构性, BDS系统呈现出有别于其他GNSS系统的特性.在卫星轨道计算方面,BDS系统的GEO卫星的导航星历解算过程与其他卫星存在不同.观测值特征方面,BDS系统的卫星伪距多路径误差与GPS有显著性的差异.在误差建模方面,由于BDS卫星空间分布的异构性,不同类型卫星的误差时变特征也存在系统性的差异,例如多路径误差的周期性与时变性.对BDS系统这些差异性的客观认识和理解是实现高精度BDS位置服务的必要条件.当然还有空间和时间参考系统不同,这里不再讨论,具体参见文献[1].
2.1 BGO与TGO数据处理结果对比
为了实现北斗和GPS数据的联合处理,本研究团队开发了BGO(BDS/GPS Office)数据处理软件,并与美国TRIMBLE的TGO软件进行结果比较.针对某高速铁路CPI控制网进行了实测分析,验证北斗/GPS联合数据处理的精度与可靠性.实测采用4台三星系统接收机(可同时接受GPS、GLONASS和北斗卫星数据),共11个时段,每个时段约1.5 h,采样间隔15 s.基线最长6 667 m,最短446 m.如图4所示.
BGO处理了57条基线并与TRIMBLE的TGO处理结果进行比较,如图5所示.坐标分量的差异均在2 cm内(图5(a)),相对精度优于2×10-6(图5(b)),证明两者在数据处理精度上相当.
2.2 北斗/GPS联合基线解算结果对比分析
针对以上57条基线,分别对GPS、北斗(BDS)数据单独处理以及北斗/GPS联合处理3种情况进行基线解算精度分析,如图6所示.
通过对比BDS和GPS结果可知,存在少量BDS基线解算精度略逊于GPS,绝大部分BDS基线能达到与GPS相当的解算精度(注:目前北斗还在试运行阶段).
北斗与GPS双系统联合后,能够获得更高精度的基线解算结果.经统计,联合解的57条基线在X、Z方向均优于1 mm,Y方向优于2 mm.与北斗和GPS相比,联合系统解算分别有55条和53条基线精度得到了改善,占总体的96.5%和93.0%.

图4 高速铁路CPI控制网三星系统建网示意Fig.4 CPI control network built by multi-mode GNSS receiver for high-speed railway
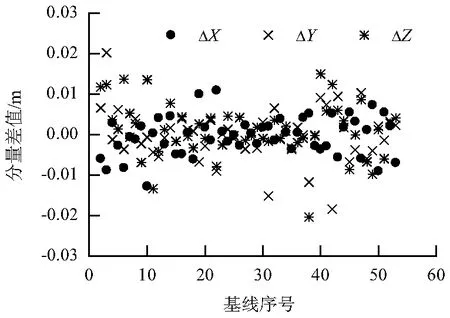
(a) 基线向量较差
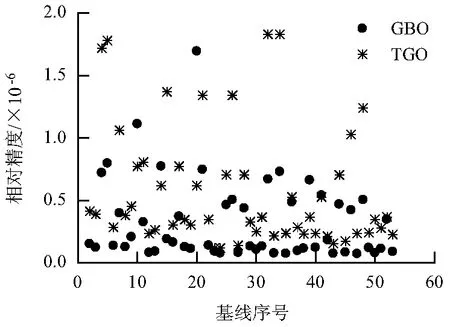
(b) 相对精度图5 BGO与TGO软件处理GPS基线结果比较Fig.5 Result comparison of BGO and TGO baseline solutions
CPI控制网无约束网平差后,各基线分量平差改正数如图6所示.北斗、GPS及联合基线的分量改正数、最弱边相对中误差和最弱点点位精度均满足CPI控制测量要求.
2.3 融合GPS/BDS的网络RTK厘米级位置服务
随着BDS星座发展进程的快速推进,现已形成覆盖亚太地区的卫星导航定位能力,加之国内支持GPS/BDS的地基增强CORS网络的逐步建成,融合GPS/BDS的网络RTK服务需求已然形成.本自主研发的增强参考站网络系统ARSNet/VENUS已发展为支持GPS、BDS、和GLONASS的多系统网络RTK位置服务平台.在一低纬度地区(北纬22°)的CORS基本单元提供RTK服务,站间距达到40 km.
表3为流动用户实时定位的符合精度,表中:σn、σe、σu分别为北、东和高方向上的定位精度.
表4为模糊度固定的成功率.可以看出在6颗可视卫星的情况下,成功固定率也可以达到90%,加入北斗后可视卫星数达13颗时,成功固定率达到98%.
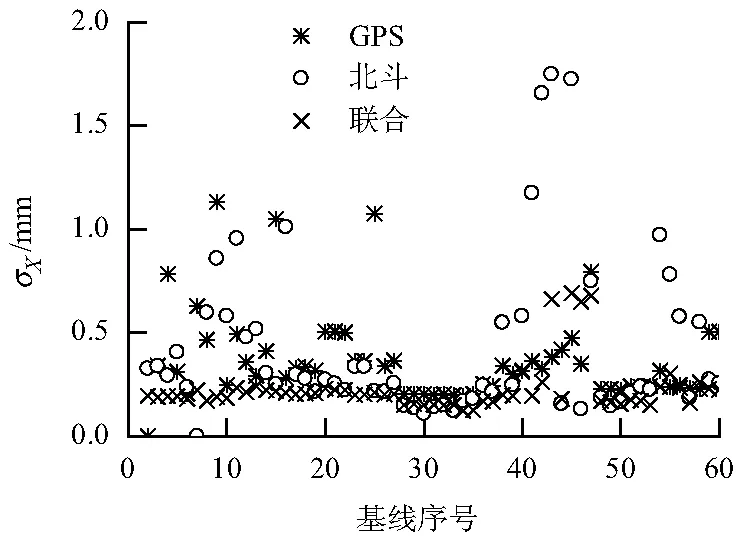
(a) 基线的X分量精度分布
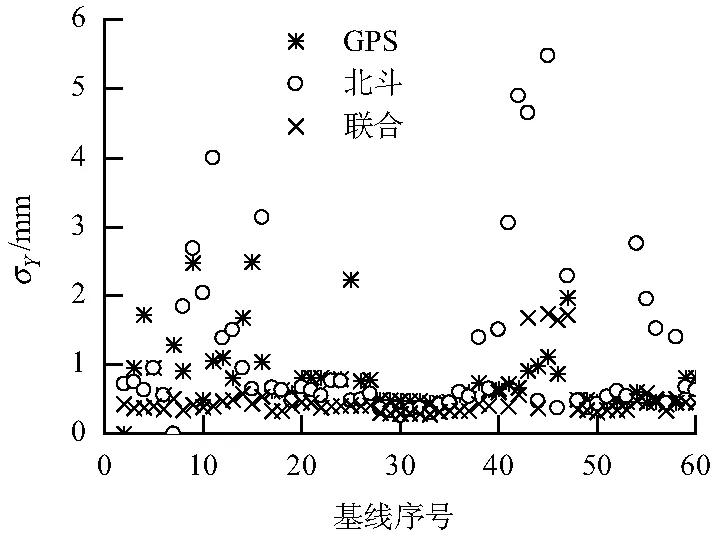
(b) 基线的Y分量精度分布
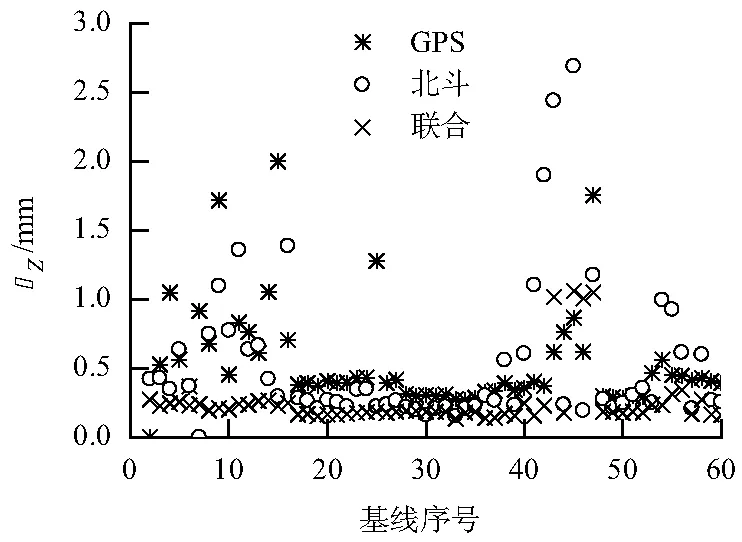
(c) 基线的Z分量精度分布图6 GPS、北斗和联合基线解算的精度Fig.6 Accuracy of GPS-only, BDS-only, and combined solutions
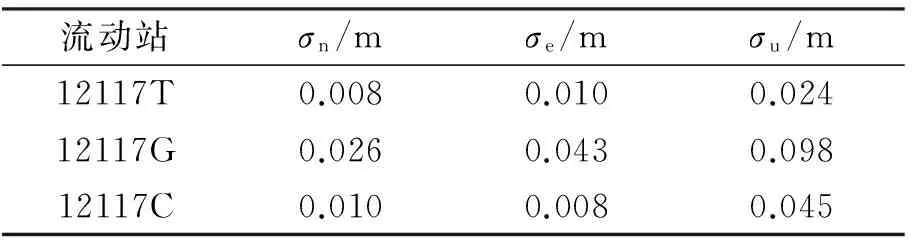
流动站σn/mσe/mσu/m12117T0.0080.0100.02412117G0.0260.0430.09812117C0.0100.0080.045
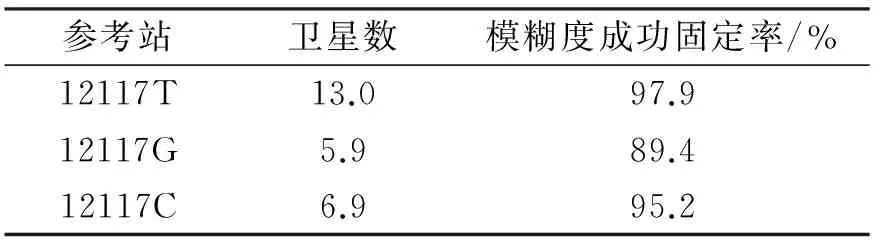
表4 模糊度固定成功率与卫星数的关系Tab.4 Relationship between satellite number and success rate of ambiguity fixing
3 大规模CORS网络数据融合与位置云
3.1 地基大规模CORS网络数据融合
地基增强CORS 网络都是基于独立部门需求而建立的局部网络,虽然解决了局域性GNSS 实时移动定位问题,但作为国家空间数据基础设施,还存在很多潜在和挑战性的问题.为了持续稳定提供大范围的高精度位置服务,连续运行参考站(CORS)网络的规模日益增大,随着大规模CORS网络和多模系统的发展,未来GNSS位置服务将是GNSS大数据的时代[9-13].
首先,现有的卫星观测网络资源在地理位置上是分布式的,数据中心一般基于部门的局域网络实现,是独立的封闭系统;其次,基准不太统一,存在跨区域服务和边界连接问题,无法实现高精度无缝导航定位,因为局部网络GNSS 虽然在覆盖区内精度分布均匀,但在区外定位精度会快速衰减;其三,就目前多系统并行发展的情况而言,多模和异构系统的互用技术成为发展的必然趋势.
随着互联网技术的发展,以建立大规模GNSS 网络数据中心,以物理门户和业务框架为代表,打破应用和服务中间件的紧耦合,实现空间信息获取与处理能力的大幅提升,为大规模国家CORS 网络的建设提供了发展全新理论体系和解决方案的基础.这就是本团队提出的基于多模网络GNSS 融合和位置云服务的思想,研究多模(北斗,GPS,Glonass,Galileo) 数据融合与互用技术,及其大规模多模网络GNSS 卫星导航定位理论.
3.2 位置云服务基本架构
GNSS位置云服务由IaaS、PaaS、SaaS组成. IaaS是基础设施及数据共享服务,连接CORS中心计算机,共享硬件及数据平台,接收来自CORS站的观测数据,并行分布式存储在集群上.
PaaS是平台服务,即数据处理与分析资源池,服务平台包括:各类数据质量诊断、数据融合、GNSS产品及其发布(如:卫星轨道、时钟参数、大气模型修正等)、动态位置服务(网络RTK)、事后精密数据处理与分析服务、以及完好性监测服务等.
SaaS是用户与GNSS大数据云服务中心的交互窗口,负责用户请求的参数配置及反馈解算结果,以客户端和软件服务的方式,提供特定用户个性化需求的位置服务,如图7所示.
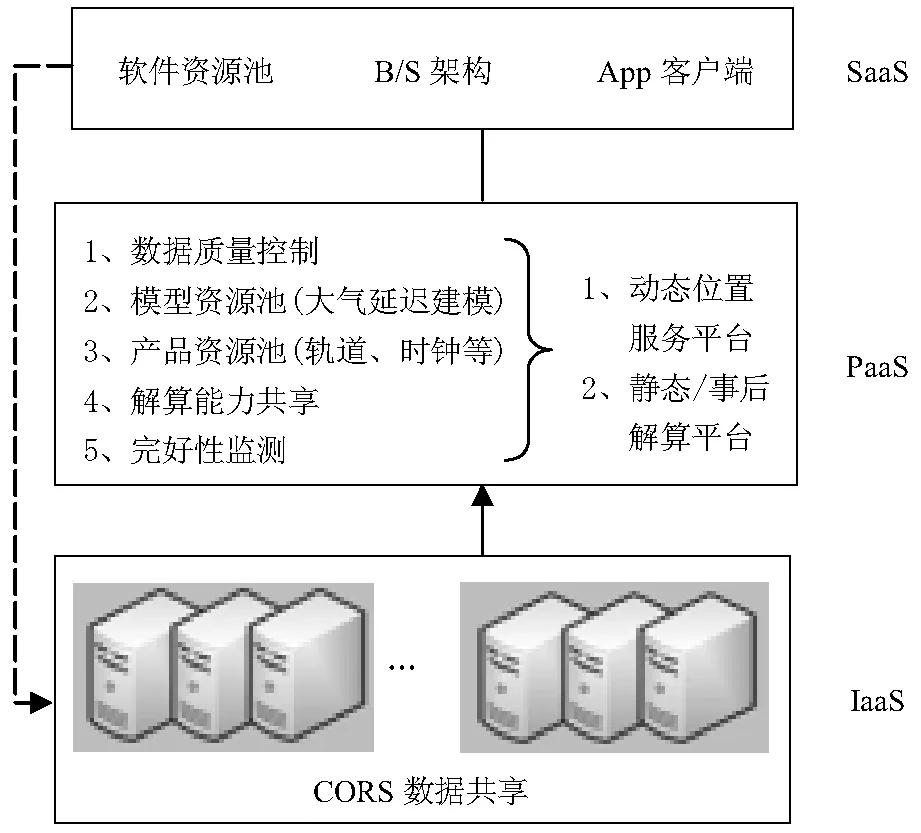
图7 GNSS位置云服务基本结构图Fig.7 Basic structure of GNSS location cloud service
3.3 案例实验分析
为了证明GNSS位置云服务的有效性,现以一案例进行实验分析.
选用4台计算机搭建服务器,并与Gamit/Globk对比解的精度及效率.4台计算机分别命名为A、B、C、D,系统运行环境为ubuntu.从CORS数据中心选取228 d的数据,采样率为30 s.这些数据均匀存储在4台计算机中,用于模仿不同CORS数据中心.实验结果显示, GNSS大数据云服务中心架构的解与Gamit/Globk的基线在精度上一致.但GNSS云服务中心架构解比Gamit/Globk的解算效率提高了25.5%.
4 结束语
要实现精密GNSS导航定位,关键在于各类GNSS相关误差影响源的精确建模与估计,生成相应产品,然后通过网络通信技术进行修正数发布,为移动用户提供精密位置服务.地基增强是精密GNSS卫星导航定位的关键之一,而多模异构系统的数据融合和互用,是GNSS发展的必然趋势.
本文针对地基增强GNSS卫星导航的几个关键技术问题,通过对比测试分析了自主研发的增强参考站网络服务系统软件,在精度和初始化时间等性能指标上与目前国际上的同类产品相当,可提供厘米级实时导航定位服务.北斗导航卫星系统基线解的精度与GPS基线解的精度相当,从试验结果看,联合系统解算基线精度有明显改善,主要是因为单一GPS或北斗在实验区可观测卫星数量和分布均有一定限制所致.双系统联合解算实际上是增加了观测值并改善卫星空间几何构型,从而改善了单一系统的定位性能.
位置云服务的思想是建立大规模GNSS 网络数据共享,以物理门户和业务框架为代表,打破应用和服务中间件的紧耦合.位置云将实现空间信息获取与处理能力的大幅提升,为广域地基增强高精度导航与位置服务,提供无缝导航定位与位置服务的全新理论体系和解决方案.
[1] 黄丁发,张勤,张小红,等. 卫星导航定位原理[M]. 武汉:武汉大学出版社,2015: 203-219.
[2] 杨元喜,李金龙,王爱兵,等. 北斗区域卫星导航系统基本导航定位性能初步评估[J]. 中国科学:地球科学,2014,44(1): 72-81.
YANG Yuanxi, LI Jinlong, WANG Aibing, et al. Preliminary assessment of the navigation and positioning performance of Beidou regional navigation satellite system[J]. Science China: Earth, 2014, 44(1): 72-81.
[3] 黄丁发. 融合多星座GNSS的大规模网络RTK与位置服务理论[J]. 学术动态,2014(2): 19-21.
[4] HU G R, KHOO V H S, GOH P C, et al. Internet-based GPS VRS RTK positioning with a multiple reference station network[J]. Journal of Global Positioning Systems, 2002, 1(2): 113-120.
[5] WUBBENA G, WILLGALIS S. State space approach for precise real time positioning in GPS reference networks[C]∥Proceedings ofInternational Symposium on Kinematic Systems in Geodesy, Geomatics and Navigation. Banff: [s.n.], 2001: 72-79.
[6] EULER H J, ZELZER O, TAKAC F, et al. Applicability of standardized network RTK message for surveying rovers[C]∥Proceedings of ION GPS/GNSS 2003 Proceedings, Session F. Portland: [s.n.], 2003: 1361-1369.
[7] 黄丁发,周乐韬,刘经南,等. 基于Internet的VRS/RTK定位算法模型及实验研究[J]. 武汉大学学报:信息科学版,2007,32(3): 220-224.
HUANG D F, ZHOU L T, LIU, J N, et al. Internet based VRS /RTK positioning algorithm and experiment[J]. Geomatics and Information Science of Wuhan University, 2007, 32 (3): 220-224.
[8] 黄丁发,周乐韬,李成钢,等. GPS参考站网络系统[M]. 北京:科学出版社,2011: 86-90.
[9] BOOMKAMP H. Distributed processing for large geodetic solution[C]∥Proceedings of Reference Frames for Applications in Geosciences. Berlin: Springer Heidelberg, 2013: 13-18.
[10] NEILAN R, FISHER S, KHACHIKYAN R, et al. IGS technical report 2012 central bureau[C]∥Proceedings of IGS Technical Report 2012. [S. l.]: Astronomical Institute, University of Bern, 2013: 13-18.
[11] SNAY R A, SOLER T. Continuously operating reference station (CORS): history, applications, and future enhancements[J]. Journal of Surveying Engineering, 2008, 134(4): 95-104.
[12] SAGIYA T. A decade of GEONET: 1994—2003: the continuous GPS observation in Japan and its impact on earthquake studies[J]. Earth Planets and Space, 2004, 56(8): XXIX-XLI.
[13] DANG Y, ZHANG P, ZHAO Z, et al. The data processing and analysis of national GNSS CORS network in China[C]∥Proceedings of 2007—2010 China National Report on Geodesy for The XXV General Assembly of IUGG, Report No. 4. Melbourne: [s. n.], 2011: 1-6.

黄丁发(1963—),博士,1998年起至今任职于西南交通大学,现为地球科学与环境工程学院教授,博士生导师.主要研究方向为全球导航卫星系统(GNSS);精密工程测量、组合导航与智能交通系统、应急辅助决策信息系统.承担国家高新技术研究发展计划(863)、国家自然科学基金、国家科技支撑计划及其他部委科技开发项目40余项.先后在香港理工大学、美国加州大学San Diego(UCSD)从事合作与访问研究.发表论文200余篇,出版专著4部,高等学校规划教材3部.现任中国测绘地理信息学会理事、四川省测绘地理信息学会和四川省地震学会常务理事.
E-mail: dfhuang@swjtu.edu.cn

周乐韬(1977—),博士,2007年起至今任职于西南交通大学,现为地球科学与环境工程学院副教授,硕士生导师.主要研究方向为全球卫星地基增强系统、全球卫星精确导航与定位、卫星及惯导组合导航、室内外无缝导航与定位、全球卫星大气遥感.承担及参与国家自然科学基金、国家高技术发展研究计划(863)项目等课题20余项.兼任中国测绘学会大地测量与导航专业委员会委员.
E-mail: ltzhou@swjtu.edu.cn
(中文编辑:秦 瑜 英文编辑:兰俊思)
Key Techniques of GNSS Ground-Based Augmentation System and Location Based Cloud Service
HUANGDingfa1,ZHOULetao1,LUJiankang2,MEIXi2,FENGWei1,ZHANGXi1,YANLi1
(1. State-Province Joint Engineering Laboratory of Spatial Information Technology for High-Speed Railway Safety, Southwest Jiaotong University, Chengdu 610031, China; 2. China Railway Eryuan Engineering Group Co. Ltd., Chengdu 610031, China)
To accomplish a GNSS (global navigation satellite system) ground-based augmentation system, a high-precision location based service (LBS) platform using augmentation reference station network (ARSNet) was developed independently. The ARSNet was tested in comparison with the international representative LBS platform, showing that its initial time and precision of network real-time kinematic (RTK) positioning are at the same level as the international platform; i.e., centimeter-level RTK positioning can be achieved in the both LBS platforms. Experimental results of data processing by combination use of Beidou system (BDS) and global positioning system (GPS) indicate that the precision of the BDS/GPS combined solution is about 1 mm in theX-andZ-directions, and 2 mm in theY-direction for the 57 baselines tested. Compared to the BDS-only and GPS-only solutions, the BDS/GPS combined processing strategy can improve the precision in 55 baselines and 53 baselines respectively, namely 96.5% and 93.0% of the total baselines. In addition, key issues of multi-mode GNSS data fusion, processing, and location service in large-scale CORS network are studied. A location cloud service, with location-independent service and resource pool, is proposed to share capabilities of data processing and analyzing, and provide diversity services and wide area seamless positioning. The proposed techniques provide a new theoretical basis to obtain, share, process and analyze information for wide area distributed CORS network.
global navigation satellite system; satellite navigation; ground based augmentation; data fusion of multi-mode GNSS; location cloud; location based service
2015-10-15
国家自然科学基金资助项目(41374032); 中国铁路总公司科技研究发展计划资助项目(2014G04-A-3); 教育部创新团队发展计划资助项目(ITR13092)
黄丁发,周乐韬,卢建康,等. GNSS卫星导航地基增强系统与位置云服务关键技术[J]. 西南交通大学学报,2016,51(2): 388-395.
0258-2724(2016)02-0388-08
10.3969/j.issn.0258-2724.2016.02.018
P228
A
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
高技术通讯(2021年3期)2021-06-09 06:57:46
科学(2020年5期)2020-11-26 08:19:14
当代陕西(2019年18期)2019-10-17 01:48:50
中国公共安全(2017年7期)2017-10-13 08:18:19
中国公共安全(2017年8期)2017-10-13 08:12:24
舰船电子对抗(2016年5期)2016-12-13 08:41:14
太空探索(2016年3期)2016-07-12 09:58:47
全球定位系统(2015年4期)2015-02-28 12:38:15