
ADCP流速仪检定拖车驱动方案探讨
2016-04-01 03:53智永明邵军唐跃平陈敏毛春雷王岩
中国测试 2016年11期
智永明,邵军,唐跃平,陈敏,毛春雷,王岩
(1.水利部南京水利水文自动化研究所,江苏南京210012; 2.水利部水文仪器及岩土工程仪器质量监督检验测试中心,江苏南京210012; 3.水利部水文水资源监控工程技术研究中心,江苏南京210012)
ADCP流速仪检定拖车驱动方案探讨
智永明1,3,邵军1,唐跃平1,3,陈敏2,毛春雷1,3,王岩1,3
(1.水利部南京水利水文自动化研究所,江苏南京210012; 2.水利部水文仪器及岩土工程仪器质量监督检验测试中心,江苏南京210012; 3.水利部水文水资源监控工程技术研究中心,江苏南京210012)
近年ADCP流速仪在国内应用不断增多,急需建设可以检定ADCP流速仪的检测平台规范水利行业产品应用。ADCP流速仪检定水槽的长、宽、深等尺寸设计,必须根据ADCP流速仪产品特点进行专门设计。相比以往检定水槽,ADCP水槽的宽度增加很多,相对应的检定拖车的跨度也会增加很多,导致检定拖车的车重增加很多,而大型检定拖车的驱动设计方案是系统设计成败的关键。根据ADCP流速仪检测特点,该文提出基于交流伺服同步电机的ADCP流速仪检定拖车混合动力驱动(4驱/2驱)设计方案:高速段(0.2~6 m/s)采用四轮驱动,低速段(0.01~0.2 m/s)采用2轮驱动,很好地解决工作速度段大跨度下速度准确度控制难题,满足ADCP流速仪不同速度段检定需求。
ADCP流速仪;检定拖车;检定水槽;粘着系数;交流同步伺服电机;滑触线供电
0 引言
流速仪检定水槽是流速仪性能检定的一项重要设备,我国现有专业流速仪检定水槽15处[1],主要用来检定转子式流速仪。通常检定流速仪有两种方式:一种是动水槽法,另一种是静水槽法,后者简单易行而且精度更高,得到世界各国的普遍采用,适用标准为ISO3455-2007《液体比重测定法》[2]。ADCP流速仪作为新型水文仪器,可以长期自动测量点流速和剖面流速分布,广泛使用于河流、湖泊及海洋中的流速自动测量[3],目前已在国内安装使用近几百套,基本上是进口产品,近几年国内有些科研院所和企业也开始ADCP流速仪的国产化研制工作,有的已开始进行产品的户外比测试验工作。尽管应用广泛,但是目前行业内尚无可广泛被接受的用于剖面仪检定或校准的相关规程及标准[4]。ADCP的流速检测方式主要有两种方式,一种是野外比测,如GPS检测法[5]等;另一种是静水槽法。国内外同行均曾经在拖曳水槽或老式检定水槽开展过少量的ADCP流速仪检定试验研究,得了一些研究成果,但实验数据稳定性很差,无法形成完整的检定操作规程,究其原因主要有:工作速度段大跨度下速度准确度控制不准、已有检定水槽槽体尺寸偏小、测试用反射颗粒制备不稳定、槽壁吸声橡胶缺乏等。针对这些问题,南自所设计团队开展了ADCP检定水槽整体方案研究工作,提出ADCP检定水槽槽体尺寸建议参数,同时也提出ADCP检定拖车混合动力驱动方案,为我国ADCP流速仪检定平台的建设提供技术支撑。
1 ADCP检定水槽设计
1.1 设计依据
根据ADCP流速仪性能特点,ADCP专用检定水槽应长度>100 m、宽度>7 m、深度>4.5 m[6]。实验室检定水槽的原理:在横断面均匀一致的直线静水槽中,在轨道上行驶的检定拖车以规定的若干稳定速度牵引流速仪,使固定安装在侧杆上的流速仪在静水中行进,测定检定拖车的速度和流速仪测得的数值,对这两组数据用方程式以及图表建立相关系[7]。
实验室设备由直线静水槽(检定水槽)、检定拖车、轨道、控制系统、通信系统、数据处理系统、安全系统以及给排水系统等组成[7]。检定拖车上装有电动驱动电机设备,经传动系统使检定拖车沿轨道运行,自动调速系统保证车速稳定,拖车速度误差应<3×10-3m/s[6],采用单轨导向轮导向,保证检定车沿轨道作稳定直线运行,调速采用无级变速方式。工作频率>300kHz的ADCP流速仪应进行水槽拖车试验[6],本文涉及的检定水槽及其配套设备均针对工作频率>300kHz的ADCP流速仪进行设计。
1.2 设计准则
1.2.1 深度设计准则
为保证检定精度必需要有3个以上有效测量单元。目前只考虑典型的单元尺寸:500~600 kHz为50~100 cm。假定声学多普勒海流仪的安装深度为0.5 m、500~600 kHz的盲区0.5 m、底部旁瓣区1 m,加上3个1 m的有效单元,经计算水槽深度应≥5 m。考虑到检定车行车速度的影响,在高速时要适当加大安装深度才能保证测量传感器不露出水面,另外考虑到高速行车时水流波动的影响,因此,水槽深度应≥5.5 m。
1.2.2 宽度设计准则
检测中声学多普勒海流仪是位于水槽的中线。则水槽最小宽度=2×槽深×tan(波束角)。声学多普勒剖面流速仪波束角通常为:15°、20°、25°、30°。采用最大波束角=30°和槽深=5 m进行计算,得到水槽最小宽度=2×5×tan30°=5.7 m。为有效减小槽壁的直接反射及旁瓣的影响,考虑裕度系数1.3,则水槽宽度应为7.5 m。
1.2.3 长度设计准则
水槽的长度应保证声学多普勒海流仪实测流速(行车历时内的平均流速)中因其自身噪声引起的随机误差能基本消除掉。因此,GB/T 24558——2009《声学多普勒剖面仪》“6.6.2.3.1流速检测”要求,流速仪测量每个速度的记录应不少于30个,如按10%的余量来考虑,以33个记录计,按照目前通用的采样速率,按1Hz频率输出,需用时33 s,检定车行车速度按4 m/s,则检定槽有效工作长度应不小于l=v×t=4×33=132 m。
1.3 主要设计参数
检定水槽槽体有效长度>232 m,宽度8 m,深度7 m,最大水深6.5 m,正常水深6 m;检定拖车宽9 m,长10 m,高3 m,重12500 kg;车速范围为0.01~6 m/s,稳定度达到一级水槽要求;车速变化率δ:

测速时间υ≤0.2 m/s时为10s,υ>0.2m/s时,为1 s[7];有效检定段长度≥132 m(速度≤4.0 m/s时);检定拖车供电功率100 kW,供电方式为滑触线供电。
2 ADCP检定拖车驱动设计方案
图1为检定水槽/检定拖车结构示意图,考虑检定拖车钢轮与检定水槽的钢轨摩擦系数较小,为保证拖车的驱动力,需要合适的车重设计,本文设计方案的参考车重为12500 kg。ADCP流速仪安装在拖车正下方,测试时,ADCP需没入水中。检定水槽钢轨长度包括工作段、加速段、减速段、安全段、检修段等。
检定拖车在中、高速状态下控制车速准确度比较容易些,但在低速下不易控制,以往的拖车驱动方式主要有两种:1)大传动比小功率直流电机加差速器双轮驱动,适用轮跨<4m的水槽;2)轮跨大、自重重的四轮独立驱动,用大功率直流电机实现驱动。本文设计方案结合ADCP流速仪检定拖车轮跨大、车重较重以及车速控制要求较高等因素,选用交流同步伺服电机作为轮系的驱动电机,主要特点有恒扭矩输出,其自身是一个闭环系统,有速度环、电流环、位置环,在受到外部干涉时,可自动修正,其准确度、灵敏度较高。检定拖车的车速设计范围为0.01~6 m/s,速度跨度接近600倍,本文设计方案将速度区间分为中高速段和低速段两档,检定车在中高速段运行时,速度为0.2~6 m/s,驱动方式为四轮独立驱动,交流同步伺服电机带单级行星齿轮变速器(传动比i=4)驱动轮系;检定车在低速段运行时,速度为0.01~0.2 m/s,驱动方式为两轮驱动,交流同步伺服电机带单级行星齿轮变速器(传动比i= 4)通过变速器(传动比i=32)联合驱动轮系(总传动比i=128),同时另外两轮的交流同步伺服电机与轮系通过离合器机械分离,作为随动轮。

图1 检定水槽/检定拖车结构示意图
2.1 轨道段落设计
ADCP流速仪检测要求有132 m以上的有效检测距离(工作段),检定拖车从静止状态升速到检测速度需要加速,加速段的设计长度参见式(2),同样,检定拖车从检测速度到静止状态需要减速,减速段设计长度与加速段设计长度相同。
检定车速度设定为0~6 m/s,加速度设定为0.6 m/s2。

即加速段距离为30 m,另外10 m为稳定段,同样,减速段距离也为30 m,另外10 m为稳定段(安全段),考虑检定拖车的检修段设计为20 m,因此,轨道的整体长度=检修段20 m+安全段10 m+加速段30 m+工作段132 m+减速段30 m+安全段10 m,轨道的设计总长为232 m,参见图2。

图2 轨道段落设计
2.2 检定拖车功率设计
检定拖车设计质量m=12500 kg,加速度a= 0.6 m/s2,则

功率计算中涉及的水下阻力以一款ADCP为例,见图3,外形尺寸396 mm×229 mm×205 mm,取截面积S=23×40=920 cm2,检定拖车设计最大运行速度Vmax=6 m/s。则检定车的最大水下阻力为:

式中:ρ——海水的密度,为1.03 g/cm3;
S——物体的有效横截面积;
C——阻力系数,柱面时C=0.6。

由于检定拖车设计检测速度为0.01~6 m/s,其速度跨度为600倍,为优化设计,将0.2~6 m/s设计为中、高速区间,0.01~0.2 m/s设计为低速区间,中、高速区间的驱动方式为直连传动的四轮独立驱动,低速区间的驱动方式为大传动比的两轮独立驱动。每组轮系由一对轴承组成,效率取η轴承=0.99,则,当检定拖车以最大运行速度Vmax=6 m/s运行所需总功率P总参见式(6)。
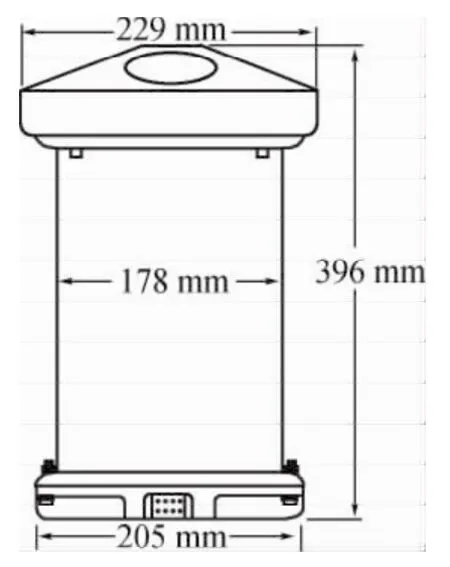
图3 国外一款ADCP外形尺寸

说明:旋桨式、旋杯式流速仪检定水槽设计功率时,考虑旋桨式、旋杯式流速仪的水阻数值相比检定车的摩擦力数值较小,一般会忽略水阻,但是ADCP流速仪检定水槽设计功率时,ADCP流速仪的水阻数值较大,设计功率时,应该将水阻计算在内。
2.3 电机选型设计
设定电机额定转速取n0=1500 r/min,则检定拖车所需总扭矩T总参见式(8)。
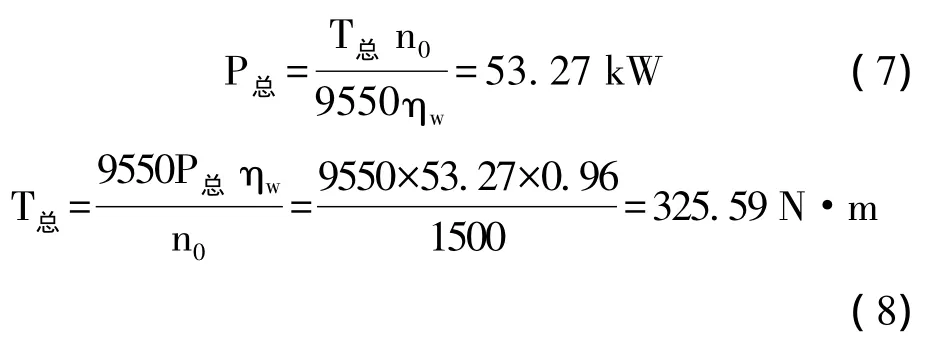
四轮独立驱动时,各轮系所需的功率P分参见式(9),各轮系所需的扭矩T分参见式(10)。

在满足动力和扭矩的前提下,选择国外的一款交流同步伺服电机,主要参数P额=13.8 kW,T额=88 N·m,n0=1500 r/min。
2.4 功率扭矩验算
1)中高速检测区间的功率和扭矩验算
中高速检测区间的驱动方式为四轮驱动,驱动轮由交流伺服同步电机带单级行星齿轮变速器(传动比i=4)来驱动,输出总功率P总参见公式(11),输出总扭矩T总参见式(12)。

检定拖车以最大运行速度Vmax=6 m/s运行所需功率P测参见式(13),其中F车=7500 N,F阻= 1023.4 N,ηw=0.96,所需扭矩T测参见式(14)。

T总>T测,扭矩验算满足。
2)低速检测区间的功率和扭矩验算
低速检测区间的驱动方式为两轮驱动,驱动轮由交流伺服同步电机带单级行星齿轮变速器(传动比i=4)再通过减速器(传动比i=32)来联合驱动,总传动比i=4×32=128总输出总功率P总参见式(15),输出总扭矩T总见式(16),其中ηw=0.99× 0.7=0.693。

检定拖车以最大运行速度Vmax=0.2 m/s运行所需功率P测参见式(17),其中F车=7500 N,F阻= 1.14 N,ηw=0.99×0.7=0.693,所需扭矩T测参见式(18)。

P总>P测,功率验算满足。

T总>T测,扭矩验算满足。
交流伺服同步电机经i=128减速后,额定转速下机械运转频率f机=1500/(128×60)=0.195 Hz,检定车车轮展开的理论长度为1000 mm,低速区间Vmax=0.2 m/s,故而检定车实际最大使用频率f'机= 0.2 Hz,有f机=f'机,机械频率满足。
2.5 检定拖车主动轮打滑验算
电机驱动检定拖车运行时,动轮作用于钢轨的力在任何情况下至多只能等于而不能大于粘着力,否则动轮就会在钢轨上空转(打滑),使机车牵引力急剧下降甚至消失。检定拖车粘着重量是检定拖车所有动轮作用于钢轨的垂直重量之和。要保证检定拖车动轮不空转,粘着重量与最大轮周牵引力的比值K必须大于许用粘着安全系数[K],建议许用粘着安全系数[K]=1.1[8]。
1)中高速区间(0.2~6m/s)四轮驱动,取V= 6 m/s,a=0.6 m/s2计算粘着系数K

则2.29>1.1,K>[K],故中高速区间采用四轮驱动模式,不会出现打滑,满足设计需求。
式中:G——检定拖车自重(四轮驱动模式),G=mg= 12500×9.8=122500 N;
F阻=CρSv2/2=0.5×0.6×1030×0.092×62= 1023.4 N
其中:ρ是海水的密度为1.03 g/cm3,S是物体的有效横截面积S=920 cm2,C是为阻力系数,柱面时C =0.6;
F车=m车a=12500×0.6=7500 N
f——钢质车轮滑动摩擦系数,取0.15;
f1——钢质车轮滚动摩擦系数,取0.05;
μ——车轮轴承滚动摩擦系数,取0.02;
d——轴径,取60 mm;
D——车轮直径,取318.3 mm。
2)低速区间(0.01~0.2m/s)两轮驱动,取V=0.2 m/s,a=0.35 m/s2计算粘着系数K,参见式(20)。

则K>[K],故低速区间采用两轮驱动模式,不会出现打滑,满足设计需求。
式中:G——二分之一检定拖车自重(两轮驱动模
F阻=CρSv2/2=0.5×0.6×1030×0.092×0.22=1.14 N
其中,ρ是海水的密度为1.03 g/cm3,S是物体的有效横截面积S=920 cm2,C为阻力系数,柱面时C=0.6;
F车=m车a=12500×0.35=4375 N
f、f1、μ、d和D的取值与式(19)中一致。
3 结束语
1)ADCP流速仪可以开展实验室检定工作,但是目前我国现有的检定水槽无法满足要求,需要重新设计检定槽体及检定拖车等相关配套设备,检定水槽的有效工作长度应>100 m,宽度应>7 m,深度应>4.5 m,水槽的具体工程尺寸需要根据检定的ADCP流速仪类型来详细设计。考虑到大跨度检定拖车的自重较大,检定拖车所配的用电功率要留有一定的冗余度,为保障检定拖车的可靠供电,供电方式采用滑触线供电。
2)ADCP流速仪设计检测速度为0.01~6 m/s,速度跨度比达到600倍,为了保证速度控制精度,需要大幅降低速度跨度比,因此将0.2~6 m/s设计为中、高速区间,速度跨度比为30,0.01~0.2 m/s设计为低速区间,速度跨度比为20,中、高速区间的驱动方式为直连传动的四轮独立驱动,低速区间的驱动方式为大传动比的两轮独立驱动。检定拖车的动力来源于检定拖车轨道轮与钢轨道的摩擦力,考虑大跨度检定拖车自重较大,为防止轨道轮变形及磨损,建议轨道轮采用钢质轨道轮。
3)结合ADCP流速仪实验室检定拖车轮跨大、自重较重且车速控制精度要求高等因素,驱动方式建议采用四轮和两轮混合驱动方式,电机建议采用交流同步伺服电机,考虑ADCP流速仪设计检测速度为0.01~6 m/s,可将0.2~6 m/s设计为中、高速区间,0.01~0.2 m/s设计为低速区间,不同速度区间需要配置相应的减速比装置,以便将电机额定转速降为检测速度需要的转速。电机选定后,需要根据检测需要进行验算,确保满足设计需要。
4)考虑ADCP流速仪实验室检定拖车轨道钢轮与钢轨摩擦系数小,滑动摩擦系数为0.15,滚动摩擦系数为0.05,因此需要进行主动轮打滑验算设计,保证检定拖车在不同检测区间均不应出现打滑现象发生,使检定拖车不出现失速现象,保障检测速度的控制精度满足规范要求。
[1]姚永熙,杨汉塘.水文仪器研究与设计[M].南京:河海大学出版社,2011:84-93.
[2]液体比重测定法:ISO3455-2007[S].2007.
[3]张建云,唐镇松,姚永熙.水文自动测报系统应用技术[M].北京:中国水利水电出版社,2005:101-106.
[4]赵越,英小勇.声学多普勒流速剖面评价方法介绍与探讨[J].水利信息化,2010(4):58-61.
[5]声学多普勒流速剖面仪检测方法:HY/T102-2007[S].北京:中国标准出版社,2007.
[6]直线明槽中的转子式流速仪检定/校准方法:GB/ T21699-2008[S].北京:中国标准出版社,2008.
[7]声学多普勒流速剖面仪:GB/T24558-2009[S].北京:中国质检出版社,2009.
[8]何生荣.越南流速仪检定车传动系统设计[J].水利水文自动化,1997,(4):32-35.
(编辑:刘杨)
Discussion on driving scheme of ADCP current meter verification trailer
ZHI Yongming1,3,SHAO Jun1,TANG Yueping1,3,CHEN Min2,MAO Chunlei1,3,WANG Yan1,3
(1.Nanjing Automation Institute of Water Conservancy&Hydrology,Ministry of Water Resources,Nanjing 210012,China; 2.Hydrological Instruments&Geotechnical Instrumentation for Quality Supervision and Testing Center,MWR,Nanjing 210012,China;3.Hydrology and Water Resources Engineering Research Center for Monitoring,Ministry of Water Resources,Nanjing 210012,China)
In recent years,application of ADCP current meter in China has been increasing,so it is in urgent need to build a testing platform capable of testing ADCP current meter to regulate the application of products in the water industry.Length,width,depth and other dimensions of ADCP current meter verification tank must be specially designed in accordance with the features of ADCP current meter.Compared to the previous verification tanks,ADCP tank is obviously wider,correspondingly,span of corresponding verification trailer will also increase,which will inevitably lead to increase of weight of the verification trailer,while driver design scheme of large verification trailer is the key for success of the system.According to the testing features of ADCP current meter,NZS design group puts forward a design scheme of ADCP current meter verification trailer hybrid drive(4 WD/2 WD)based on AC synchronous servo motor:4-wheel drive is adopted in the high-speed segment(0.2-6m/s)and low 2-wheel drive is adopted in the low-speed segment(0.01-0.2m/s),so that problem that it is difficult to control speed accuracy at large span in the operating speed segment is solved well,and the verification requirements of ADCP current meter at different speed segments are met.
ADCP current meter;verification trailer;verification tank;sticking coefficient;AC synchronous servo motor;trolley line power supply
A
1674-5124(2016)11-0079-05
10.11857/j.issn.1674-5124.2016.11.017
2016-04-10;
2016-06-15
智永明(1966-),男,山西晋中市人,高级工程师,研究方向为水文水资源自动监测技术、水文仪器检定试验装备等。
猜你喜欢
发明与创新·小学生(2021年11期)2021-12-24
发明与创新(2021年43期)2021-12-15
汽车零部件(2020年7期)2020-08-03
汽车实用技术(2019年9期)2019-05-15
小天使·五年级语数英综合(2018年9期)2018-10-16
汽车实用技术(2018年15期)2018-08-29
中国新闻周刊(2017年21期)2017-06-15
幸福(2016年6期)2016-12-01
阅读(中年级)(2016年8期)2016-05-14
湖南大学学报·自然科学版(2014年2期)2014-12-25
