
基于机器视觉的玉米秸秆行实时定位机器人设计
2016-03-23 06:45胡应占汪小志鲍秀兰
农机化研究 2016年6期
张 丽,胡应占,汪小志,鲍秀兰
(1.河南工业职业技术学院,河南 南阳 473000;2.南昌工学院,南昌 330108;3.南昌大学,南昌 330031;4.华中农业大学,武汉 430070)
基于机器视觉的玉米秸秆行实时定位机器人设计
张丽1,胡应占1,汪小志2,3,鲍秀兰4
(1.河南工业职业技术学院,河南 南阳473000;2.南昌工学院,南昌330108;3.南昌大学,南昌330031;4.华中农业大学,武汉430070)
摘要:为了实现机器人玉米秸秆行的精确定位,对耕作玉米机器人的结构进行了改进,并提出了一种基于泰勒级数展开式的RSSI定位方法,提高了机器人玉米秸秆行的定位精度。定位系统使用高清晰度的摄像机采集图像,并采用PID闭环反馈的方式控制机器人的位移,利用PC主控端图像处理,实现了实时定位功能。为了验证机器人玉米秸秆行定位的可靠性,采用田间试验的方法对机器人的性能进行了测试。结果表明:RSSI定位方法的定位精度较高,且图像处理系统可以准确地标定玉米秸秆行,实现机器人在玉米田中的精确定位,避免了机器人在作业过程中对农作物造成损害。
关键词:玉米秸秆;实时定位;机器视觉;闭环系统;反馈调节
0引言
为了实现农业机械的自动导航功能,首先需要解决的两个问题是定位和控制:定位是精确地判断农业机械的位置及相对于参考点的位置;控制包括决策和末端执行件的控制,如偏转位移、行进速度等,使机器人按照预定的位置规划路径。机器人采用自动导航系统,实现了上位机决策系统和下位机控制系统的结合:上位机主要负责图像的实时处理及导航的决策;下位机主要负责机器人执行末端的控制。该方法使机器人从整体上具有可靠性和实时性的等特点,总体设计框图如图1所示。其中,摄像机可以实时采集农田图像信息,通过USB总线将图像信息传输至主控计算机;PC机对图像进行处理,完成基本控制路径的识别和精确定位,从而计算出机器人的控制路径,决策出机器人的位移。决策结果使用CAN总线传送到位移控制器,位移控制器给出电流信号,对液压装置进行控制,从而完成机器人的自动导航。
1机器人结构总体设计
为了实现机器人玉米秸秆行的精确定位,需要对玉米机器人的结构进行改进,主要是使用高清晰度的摄像机和PLC反馈调节系统。其中,系统采用PID闭环反馈调节系统,而系统中的PC主控端具有图像处理的功能。机器人的总体结构如图2所示。

图1 机器人总体设计框图

1.动力部分 2.农机具 3.液压油缸 4.摄像机
农机具机器视觉自动导航系统包括主控计算机、摄像机、横向位移控制器、液压系统和农机具等。为了实现施肥的精密控制,使用PID控制器来调整机器人的移动误差,结构框架如图3所示。
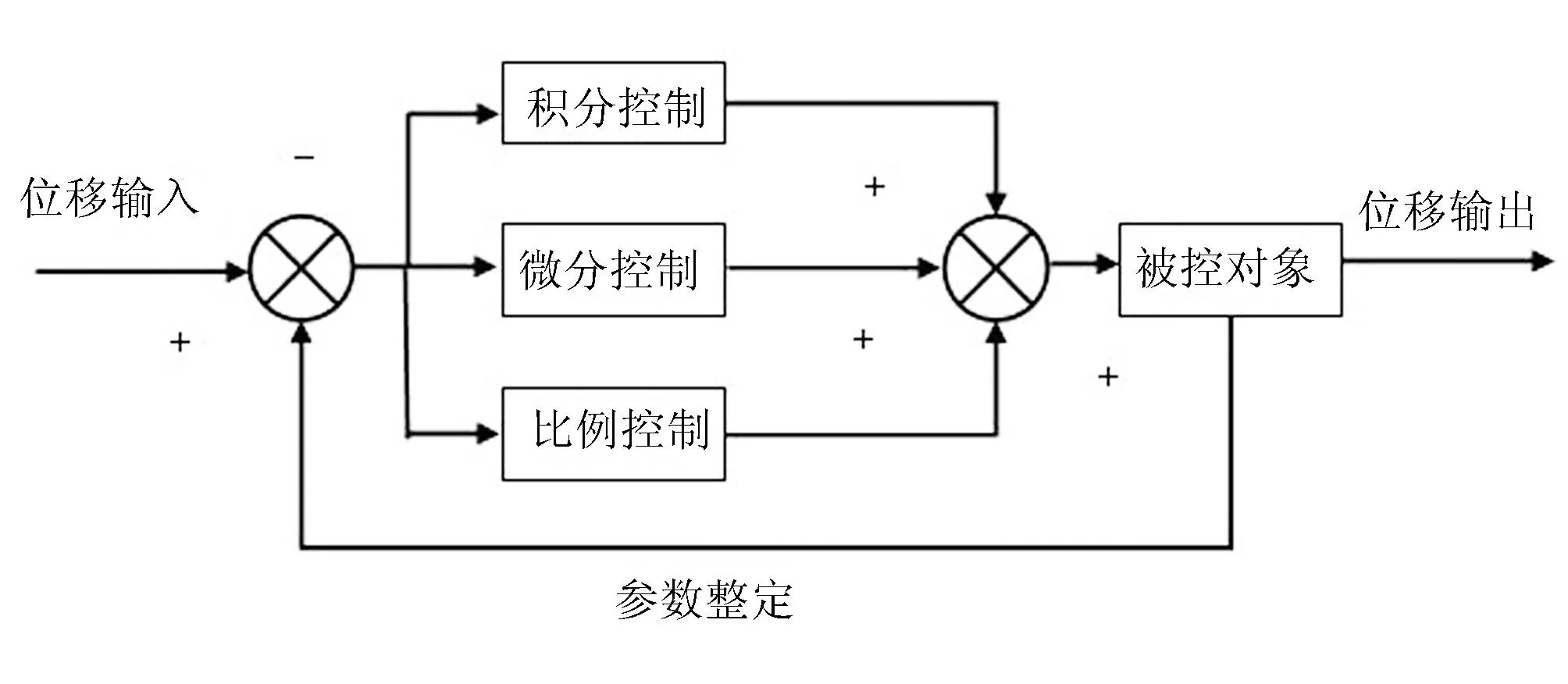
图3 机器人位移误差PID控制器
利用PID控制器对机器人的位移误差进行控制,其控制方程为
(1)
其中,kp表示积分调节系数;ki表示微分调节系数;kd表示比例调节系数;T表示采样周期;e表示位移误差控制。其中,位移的初始输入多少可以通过系统定位来控制。
2实时定位系统设计
无线信号的信号强度随着传播距离的增加而衰减,根据移动终端测量接收到的信号强度和已知的无线信号衰落模型,可以估算出收发方之间的距离;根据多个估算的距离值,可以计算出移动终端的位置。田地一般空间较小,通常的测距方法不适合小空间的测量,而基于RSSI的测距方法则没有这个缺点,且其信号模型在小范围内比较接近理论值,实时定位的基础是三边测量和泰勒级数展开定位法。
2.1三边测量法
首先假设3个位置,这3个位置是3个圆的圆心A、B、C,如图4所示。

图4 三边测量法
3个位置对应的坐标是(x1,y1),(x2,y2), (x3,y3),而3个圆的交点便是待定位的位置,其坐标为 (x,y)。假设无线接入点和测量点的距离为d1、d2、d3,则可以得到
(2)
对式子进行变换可以得到
(3)
终端坐标的位置可以表示为
(4)
2.2泰勒级数展开定位法

(5)

(6)
(7)
真实位置坐标和近似位置坐标的偏移量为


(8)
式(8)在近似位置处利用泰勒级数展开,并去除一阶偏导各项,则
(9)
各偏导数经计算为
(10)
通过整理可得
(11)
做如下假设
(12)
则式(11)可简化为
Δdi=axiΔx+ayiΔy
(13)
于是可得
(14)
做如下定义
(15)
于是可以得到
HΔρ=Δd
(16)
3玉米秸秆行实时定位机器人测试
为了测试机器人玉米秸秆行定位的有效性和可靠性,本文采用田间试验的方法对机器人进行了测试,项目主要包括行中心线的标定和二值化处理结果。其中,机器人的示意图如图5所示。该机器人装由高清摄像头,可以完成图像采集,并通过PC机对图像进行处理,基本流程如图6所示。

图5 测试玉米垄间行走机器人示意图
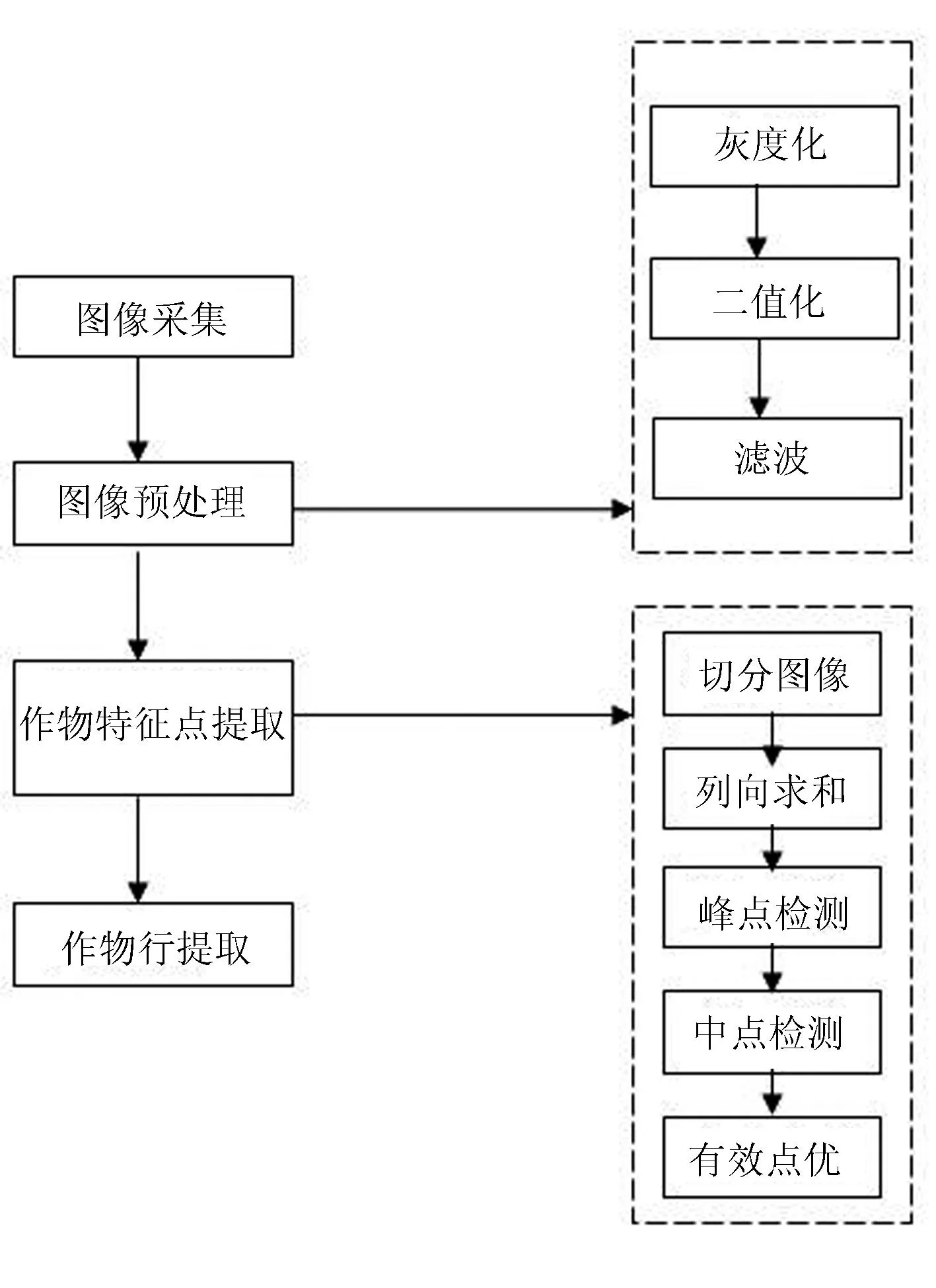
图6 图像采集和处理过程示意图
本文在研究吸取了其他农作物行识别的各项关键技术的基础上,重点实现作物行的特征点提取、优化。同时,利用Hough变换进行作物行的提取,最终与原来的彩图上画出提取的直线,结果如图7所示。
由图7可以看出:通过图像处理标定后,在玉米秸秆中间位置可以出现一条明显的直线,根据此直线可以实现玉米秸秆行的准确定位。
图8为玉米秸秆行图像的二值化结果图。由图8可以看出:通过二值化处理,玉米秸秆行可以清晰地显示出轮廓,有助于玉米秸秆行的定位。通过多次实验对误差进行了统计,得到了定位误差统计表如表1所示。

图7 玉米秸秆行识别结果

图8 二值化轮廓图
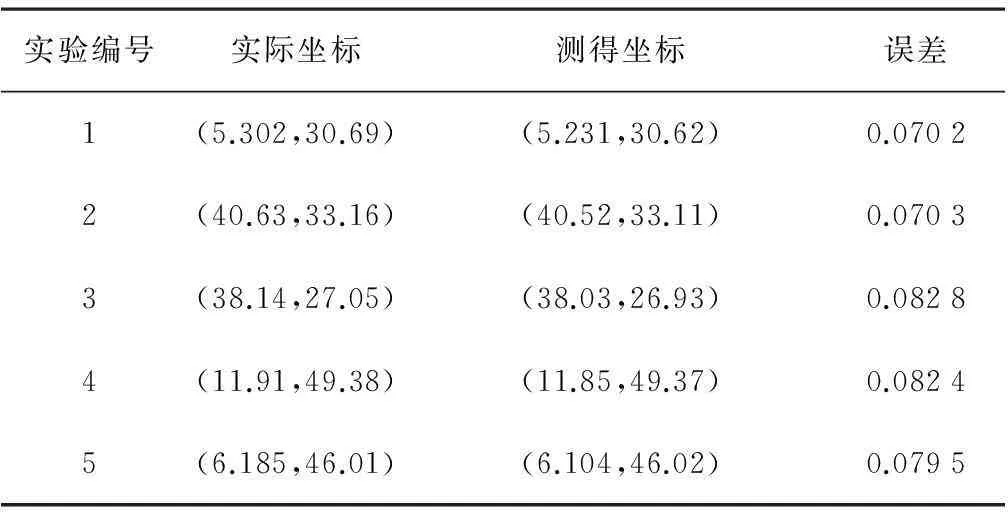
实验编号实际坐标测得坐标误差1(5.302,30.69)(5.231,30.62)0.07022(40.63,33.16)(40.52,33.11)0.07033(38.14,27.05)(38.03,26.93)0.08284(11.91,49.38)(11.85,49.37)0.08245(6.185,46.01)(6.104,46.02)0.0795
由表1可以看出:通过5次试验后发现,该系统的定位稳定性较好,误差波动不大,最大误差仅为0.828cm,玉米秸秆行的定位精度较高。
为了验证本文使用的RSSI泰勒级数展开定位方法的优势,使用质心算法和Dv-hop算法与其进行对比,如表2所示。通过对比发现:RSSI泰勒级数展开定位的精度明显比其他算法高,从而验证了该定位算法的可靠性。

表2 3种算法误差对比
4结论
设计了一种新的玉米耕作机器人的机器视觉系统,并提出了RSSI的泰勒展开技术定位计算方法,有效地提高了玉米耕作机器人对玉米秸秆行的识别准确率及作业精度。
对机器人和机器视觉定位系统的性能进行测试,并使用高清摄像机完成图像采集,且利用PC主控端图像处理,实现了实时定位功能及机器人位移偏转量的控制。通过测试发现:本文提出的RSSI定位方法的定位精度比质心算法和Dv-hop算法都要高,且图像处理系统可以准确地标定玉米秸秆行,从而验证了该系统的有效性和可靠性,为WSN和机器视觉技术在玉米耕作机器人上的应用提供了较有价值的参考。
参考文献:
[1]任维政, 徐连明.基于RSSI的测距差分修正楼宇内定位算法[J].传感器技术学报,2008,21(7):1247-1250.
[2]石 鹏, 徐凤燕,王宗欣.基于传播损耗模型的最大似然估计室内楼宇内定位算法[J].信号处理,2005,21(5):502-504.
[3]史龙,王福豹,段渭军,等无线传感器网络Range-Free自身楼宇内定位机制与算法[J].计算机工程与应用,2003, (23):127-130.
[4]陈维克, 李文锋.基于RSSI的无线传感器网络加权质心楼宇内定位算法[J].武汉理工大学学报:交通科学与工程版,2006,30(2):265-268.
[5]马祖长, 孙怡宁.无线传感器网络节点的楼宇内定位算法[J].计算机工程,2004,30(7): 13- 14.
[6]江 冰, 吴元忠,谢冬梅.无线传感器网络节点自身楼宇内定位算法的研究[J].传感技术学报, 2007(6):1381-1385.
[7]李连,朱爱红.无线传感器网络中的楼宇内定位技术研究[J].微计算机信息:测控自动化,2005, 21(9):133-135.
[8]李建中, 高宏.无线传感器网络的研究进展[J].计算机研究与发展,2008,45(1):63-72.
[9]王志强,武佩,曹丽英.新型锤片式饲料粉碎机出料管内气固两相流模拟[J].内蒙古农业大学学报:自然科学版,2009(2):184-187.
[10]何菊,吴建民.畦作沟灌小麦起垄播种机的研究与设计[D].兰州:甘肃农业大学,2007:17- 19.
[11]李界家,陈浩,李颖.神经网络算法解耦控制在中央空调系统中的应用[J].沈阳建筑大学学报,2012,28(1):182-186.
[12]李洪欣,杨建中.基于两参数的表冷器建模方法研究[J].建筑热能通风空调,2009,28(6): 15-17.
[13]孟庆山.水源热泵机组变流量水系统节能优化探讨[J].制冷与空调,2010,10(1):84-89.
[14]谢志勇,张铁中,赵金英.基于Hough变换的成熟草莓识别技术[J].农业机械学报,2007,38(3):106-109.
[15]王东,赵宇,王秀红.一种改进的DFT迭代的MIMO-OFDM系统信道估计算法[J].应用科技, 2009,3(3):19-22.
[16]徐文颖,张静,董建萍.导频信道估计中的插值算法[J].上海师范大学学报,2007, 12(6):41- 46.
[17]陈晖,陈晓光.基于直接判决导频跟踪的OFDM系统快时变信道估计[J].通信学报,2006,9 (27):1-5.
[18]李文见, 姬江涛.轮履复合式农业机器人越避障控制研究[J].河南科技大学学报:自然科学版,2007(8):57-59.
[19]王仲民, 戈新良, 唐智强.多传感器信息融合技术研究现状和发展趋势[J].河北工业大学学报,2003,32(2): 30-35.
[20]国刚,王毅.应用BP神经网络进行手写体字母数字识别[J].人工智能及识别技术,2008,4 (6):1459-1460.
[21]施少敏, 马彦恒, 陈建泗.基于BP神经网络的数字识别方法[J].兵工自动化,2006, 25 (10): 40-41.
[22]许颖泉. 用神经网络进行数字图像识别研究[J].应用科技,2008(12):59-60.
Design for Line Real-time Positioning Robot of Corn Stalk Based on Machine Vision
Zhang Li1, Hu Yingzhan1, Wang Xiaozhi2,3, Bao Xiulan4
(1.Henan Polytechnic Institute, Nanyang 473000, China; 2.Nanchang Institute of Science & Technology, Nanchang 330108, China; 3.Nanchang University,Nanchang 330031, China; 4.Huazhong Agricultural University,Wuhan 430070, China)
Abstract:In order to achieve accurate positioning robot corn stalk line, the structure of farming corn robot is improved, and it put forward a kind of RSSI localization method based on Taylor series expansion, and increase the corn stalk line robot positioning accuracy.Together with the method of PID closed-loop feedback control,by using high resolution camera gathering image,the positioning system use the PC master side image processing the displacement of the robot , realized the real-time positioning function. In order to verify the reliability of the robot corn stalk line, and adopt the method of field experiments on the performance of the robot were tested.Through test,it was found that the proposed RSSI positioning method of positioning accuracy is higher, and the image processing system can accurate calibration of corn stalk line, which can accomplish the precise positioning of the robot in the corn field and avoid the robot in the process of operation causing damage to the crops.
Key words:corn stalk; real-time positioning; machine vision; the closed loop system; feedback adjustment
文章编号:1003-188X(2016)06-0041-05
中图分类号:S225.5+1;TP391.41
文献标识码:A
作者简介:张丽(1979-),女,河南南阳人,讲师,硕士。通讯作者:汪小志(1981-),女,武汉人,讲师,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFB322)
收稿日期:2015-05-25
猜你喜欢
山东农业科学(2017年2期)2017-03-15
农机使用与维修(2017年3期)2017-03-15
农业与技术(2016年22期)2017-03-07
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年26期)2016-12-17
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
企业导报(2016年10期)2016-06-04
戏剧之家(2016年5期)2016-04-05
