
播种机嵌入式超高频无源RFID系统调速特性研究
2016-03-23 06:45王风燕董珍珍刘志刚
农机化研究 2016年6期
关键词:播种机
王风燕,董珍珍,刘志刚
(1.河南工业职业技术学院,河南 南阳 473000;2.南昌工学院,南昌 330108;3.南昌大学,南昌 330031 )
播种机嵌入式超高频无源RFID系统调速特性研究
王风燕1,董珍珍1,刘志刚2,3
(1.河南工业职业技术学院,河南 南阳473000;2.南昌工学院,南昌330108;3.南昌大学,南昌330031 )
摘要:为了提高播种机播种距离的精度,减少排种器打滑现象,以及降低地形、地质对精密播种的影响,提出了一种新的超高频无源RFID调速优化方法。该方法考虑排种器无级变速和地轮的打滑,根据不同的地形和地质,可以自动调节播种机的速度,达到精密控制播距的效果。系统利用播距控制原理和RFID调速控制原理,将RFID嵌入到了轮胎和排种器中,以STC12C5A60S2作为主控芯片,实现了速度数据的采集、处理和调节。为了验证系统的有效性和可靠性,对普通机和调速机进行了播种测试,从而得到了速度随时间变化曲线及株距等测试数据。对数据进行分析发现:利用RFID调速优化的方法可以实现播种机速度的连续性控制,并且株距明显比普通机的变异系数小,播种精度有了大幅度的提高,可以为播种机的优化设计提供技术参考。
关键词:播种机;播种精度;无源RFID;优化调速
0引言
随着科学种植技术的发展,电子技术和自动化技术被越来越多地应用在精密化播种过程中。精密播种技术可达到苗匀、苗齐、苗壮,能够保证种子的田间分布最合理,播下的种子量精确,株距均匀,行距一致,株距也一致,为种子的生长发育创造最佳条件。精密播种机械不仅可以大量节省种子,增强种子的使用率,而且能够提高农作物的产量。但是精密播种需要精确的电气化设备作为支撑,而目前播种机的电气化及自动化程度还相对比较落后,因此开发一种自动化程度较高的新型精密播种机具有重要的意义。
超高频无源RFID电子标签作为传感节点,可以避免传感节点的大型化及采用电池供电。在欧美发达国家,嵌入式超高频无源RFID系统已得到了广泛应用。本文研究利用超高频无源RFID技术,对播种机的轮胎速度和排种器转速进行实时监测,可以自动调整速度,以适应不同地形和地质的田间作业,实现了均匀化播种,从而大大提高了播种的精度。同时,系统就有能耗低、适应性好的优点,可以在很多播种机型中推广使用。
1精密播种器总体设计
小麦播种量不是一成不变的,因为在排钟过程中,无级变速器和地轮的打滑会影响排种器单位实际的排量,而地形和地质的不同也会对播种机的行进速度产生较大的影响。因此,在实际播种操作过程中,需要实时监测播种机的行进速度,监测排种器的打滑。为此,本文设计了一种新的超高频无源RFID系统,总体设计框架如图1所示。

图1 系统总体设计框架
图1中,主要是利用对排种器转速和播种机行进速度的识别,对播种机行进速度进行均匀化控制,从而实现时间、株距的均匀化分布,以提高播种的精度。
2精密播种器设计原理
2.1播距控制原理
为了合理地确定播种距离,首先需要计算初始播种量。按照实际播种作业速度,以相同的转速匀速转动地轮30圈,测定各行的排种量,重复3次,最后取平均值,则
(1)
其中,Q为播种机总播种量;G为被测的总行数下的总排量;D为地轮的直径;B为被测定行数的幅宽;N为地轮的转动圈数;ε为驱动平均滑移率。
排种量的标准差为
(2)

排种均匀性变异系数为
(3)
在实际播种过程中,播种机行进速度为Vm,排种器每圈平均下的种子量为Nm粒,排种器工作时的打滑率记为δP。如果播下的种子中粒与粒之间的距离是acm,按照精密播种的要求,则排种器要求的实际转速n1的公式为
(4)
在实际耕种播种过程中,精密排种器的打滑率主要有两部分组成,这两部分包括调速器自身打滑率δT和提供排种器驱动力的地轮存在的打滑率δD,则打滑率为
δP=1-(1-δD)(1-δT)
(5)
因为实际传动中地轮会出现滑移的情况,所以地轮的实际转速n2可以记作
(6)
在实际RFID监测过程中,可以综合考虑精密排种器的打滑现象,对排种器的转速进行监测,并据此调节精密播种机的行进速度,得到合理的播距。
2.2RFID调速原理设计
耕播优化系统以STC12C5A60S2作为主控芯片,与外围的RFID无线模块、模拟量信号调理电路、堵塞处理电路和报警电路共同组成。其总体的设计框架和原理如图2所示。
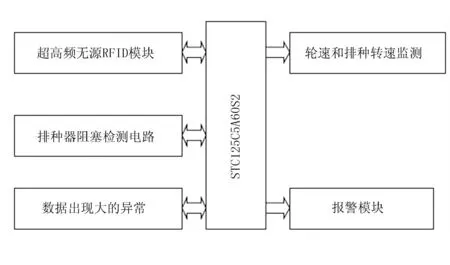
图2 耕播机RFID优化系统
图2中,主控芯片采用STC12C5A60S2低功耗、高速及超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,且速度快8~12倍;内部集成MAX810专用复位电路、2路PWM、8路A/D转换;针对电机控制,强干扰场合,完全适用于户外作业的农耕场合。
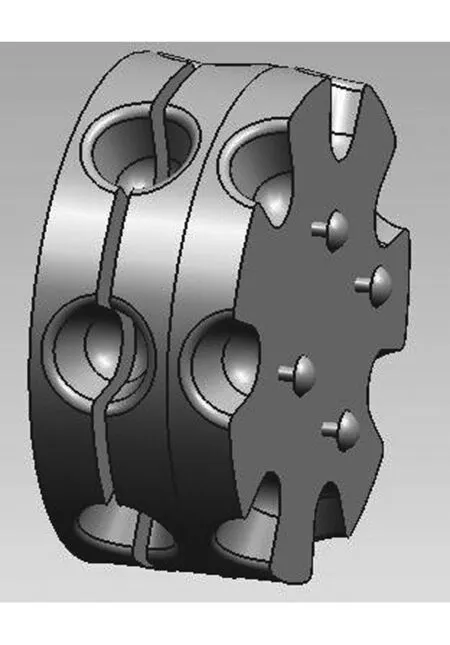
图3 弧形挡板
为了防止种子提前落下,还应在相应位置放置一个弧形挡板,弧形挡板圆弧处的半径应与排种轮半径相同,通过4个螺钉与固定部分外壳连接,具体模型如图3所示。在该模型上可以安装RFID嵌入式模块,其安装原理和图4相同。
其中,轮胎由胎冠、胎肩、胎侧组成。轮胎依附在支撑钢圈上,可在轮胎硫化成型时嵌入RFID电子标签。图4为轮胎胎侧和 RFID 电子标签嵌入轮胎后的示意图,其电路原理模型如图5所示。
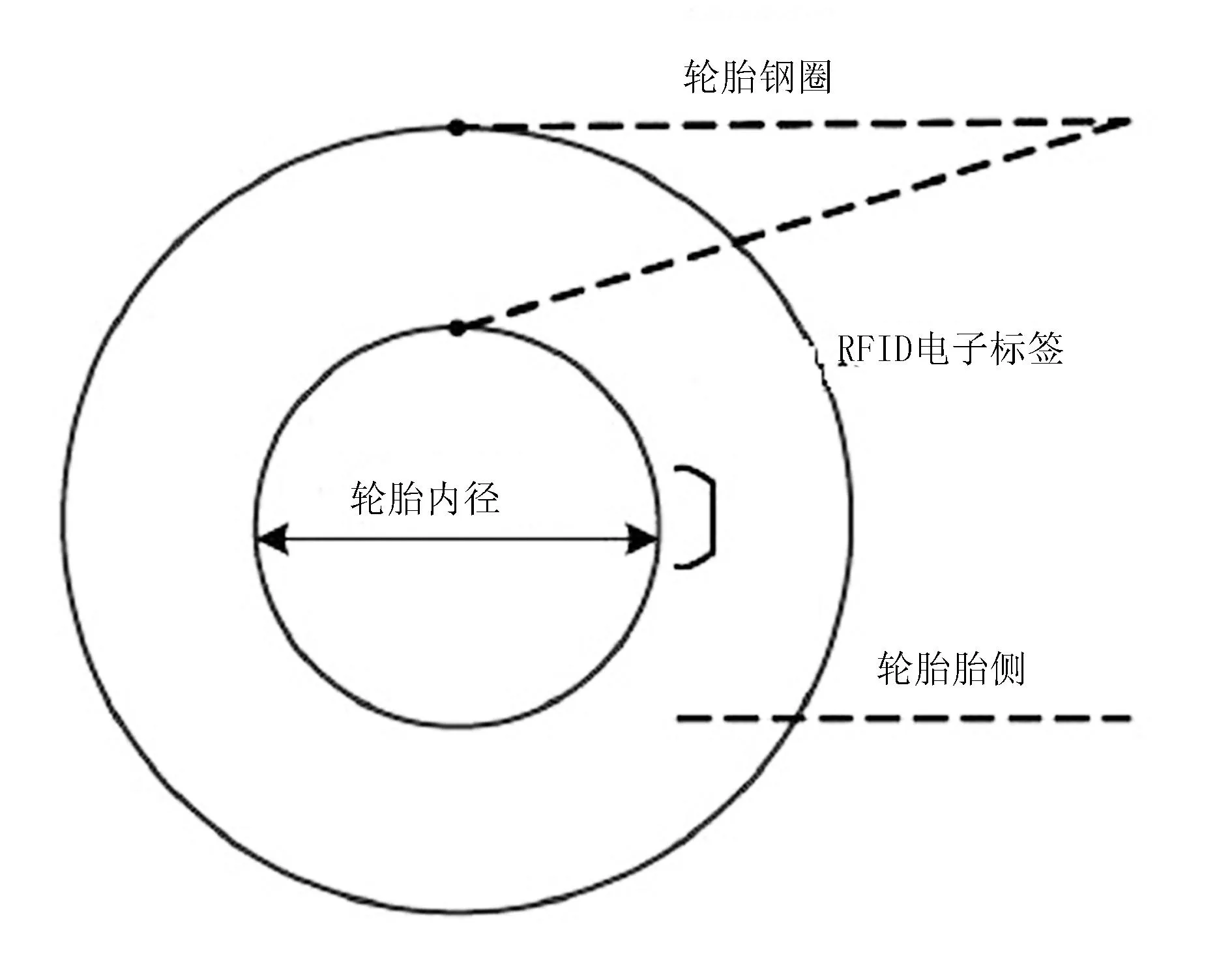
图4 电子标签嵌入轮胎

图5 RFID系统工作原理
无源RFID系统的工作过程和雷达类似,读卡器可以通过前向的链路向电子标签发送射频信号;电子标签接受到射频信号后,转换成能量,继续向后链路传递,将数据传递回读卡器。
3精密播种器效果测试
3.1硬件和软件配置
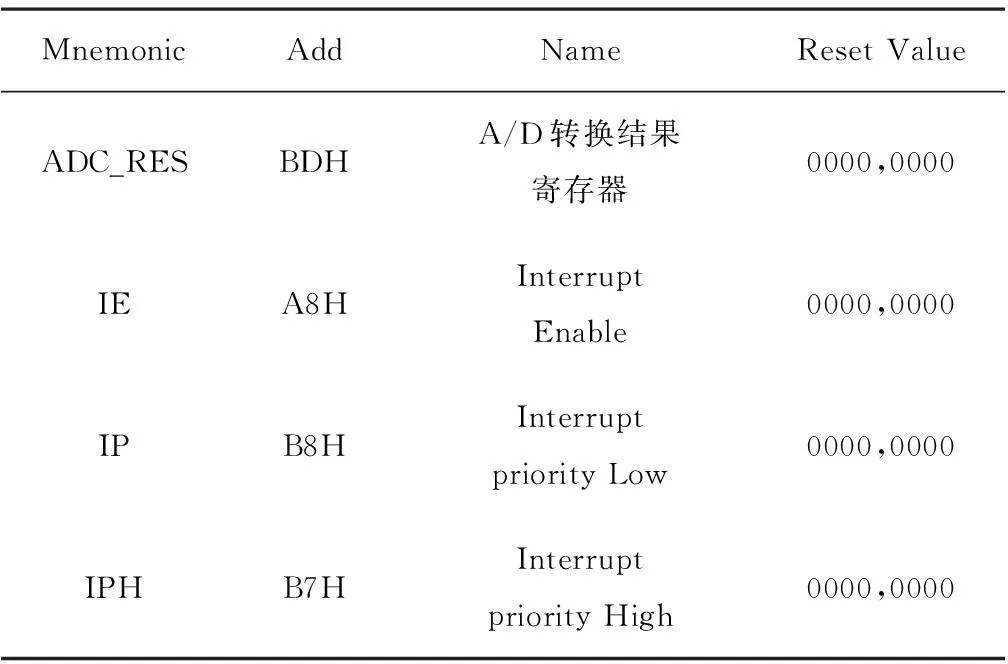
为了验证设计系统的有效性和可靠性,本次研究对播种机样机的调速性能进行测试。其中,主要芯片STC12C5A60S2内含A/D转换寄存器,可以实现A/D转换功能,不需作为A/D使用的口可继续作为I/O口使用。STC12C5A60S2单片机与A/D转换有关的控制寄存器表如表1所示。
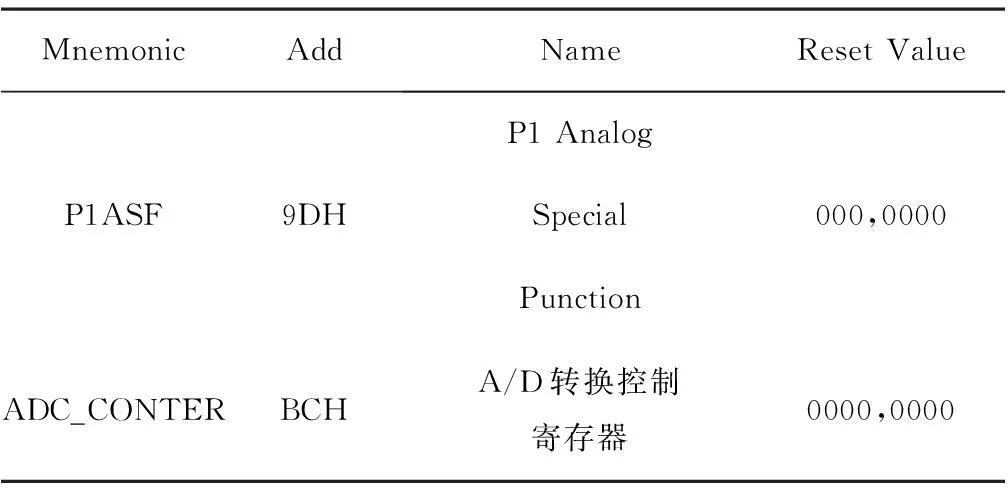
表1 控制寄存器
续表1
利用软件通过对P1ASF寄存器的设定,将P1.0作为A/D转换的输入端,通过ADC_CONTR特殊功能寄存器的设定来设计A/D转换的数据存储格式及转换的频率,控制A/D转换的开始,并通过其来检测A/D转换结束的标志位。
调速的基本原理如图6所示。
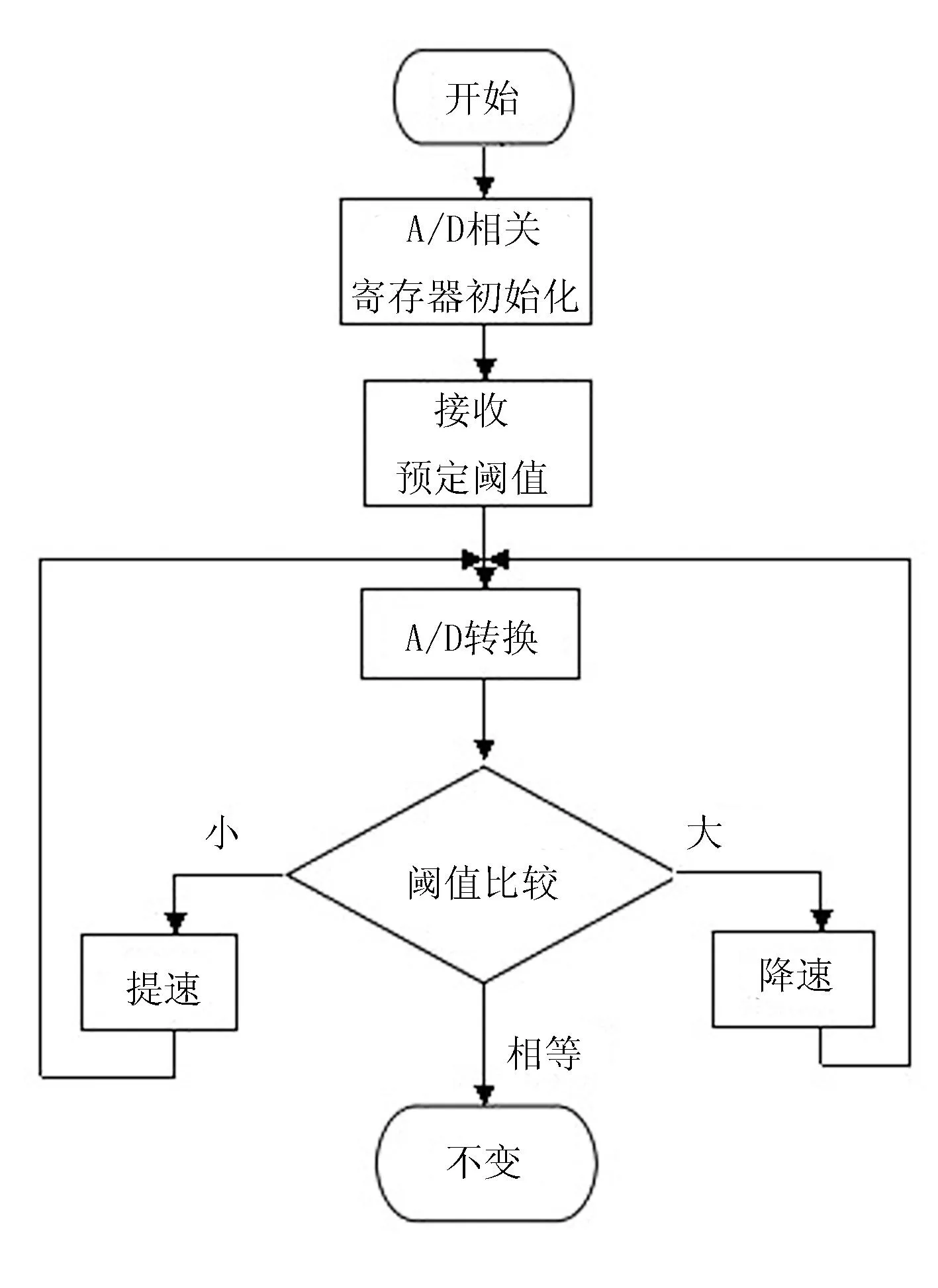
图6 调速原理图
调速主函数主要完成整个软件运行程序的模块化控制操作。其中,定义了多个全局变量,作为整个函数的运行的基础。定义的全局变量如下:
#definetiaosu8
extern uint speed=0;
extern uint cricle=0;
extern uint conter=0;
extern volatile uchar revbuff[tiaosu]=0;
extern volatile uchar senbuff[tiaosu]={0,0,0,0,0};
extern uchar i=0;
extern uchar sstate=0;
extern uchar pstate=0;
extern uchar legstate[3]={0,0,0};
extern ulong area=0;
……
3.2测试结果
通过对系统的测试,得到了测试速度随时间变化参数及虚拟样机和普通机的对比结果;通过对结果的分析,可以得到该系统对精密播种的控制性能。控制速度随时间变化曲线如图7所示。
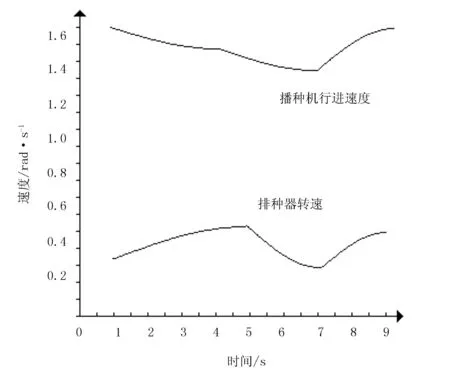
图7 速度随时间变化曲线
由图7可以看出,在调速系统的控制下,速度可以实现连续性变化。
通过6次行进速度测试,得到了普通机和调速机的速度测试结果,如表2所示。由表2可以看出:调速机可有效地对速度进行调节,根据地质、地形及排种器的变化,来调节行进速度。
普通机和实验样机的株距测试结果如表3表示。由表3可以看出:调速机的株距变异系数要明显小于普通机。这说明,在调速的作用下,样机的播种精度大幅度提高,系统的适应性较好,可以在各种播种机中推广使用。

表2 行进速度测试结果

续表2
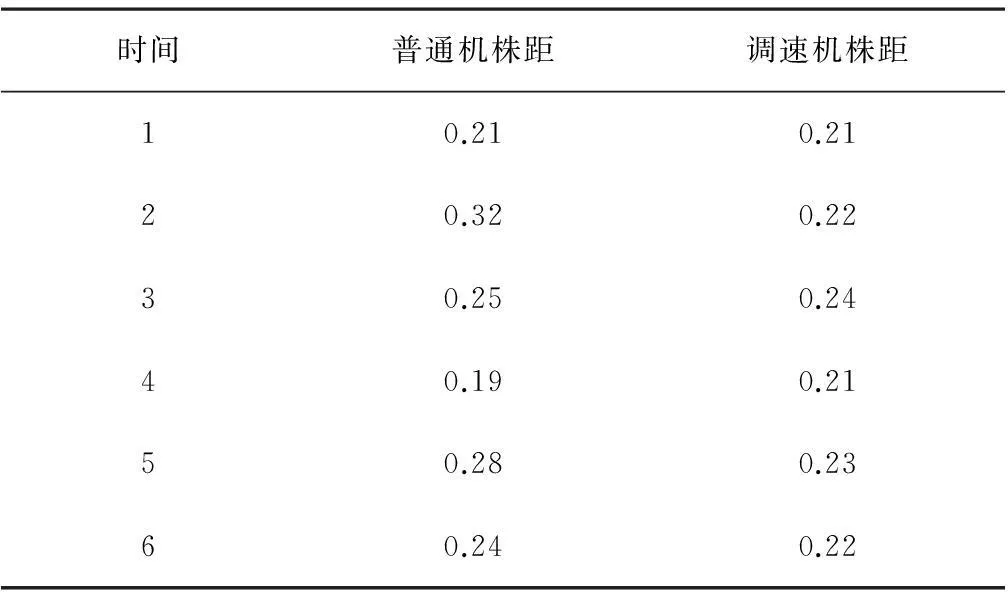
表3 株距测试结果
4结论
1)依据超高频无源RFID技术,结合播种过程中遇到的不同地形、地质和排种器的打滑等问题,设计了一种新的播种机精播的调速系统,实现了播种机行进速度控制的优化设计。
2)根据播距控制原理和RFID调速控制原理,将RFID嵌入到了轮胎和排种器中,并配置了控制系统的软件和硬件环境。通过对普通机和调速机的测试,得到了速度和株距的一系列相关测试结果。
3)通过对普通机和RFID调速机的株距结果进行对比发现:RFID调速机大大提高了播种的精度,且系统具有能耗低、适应性好的优点,为播种机精耕细作技术的研究提供了有效的参考。
参考文献:
[1]秦国成,秦贵,张艳红.设施农业装备技术现状及发展趋势[J].农机化研究,2012,34(3):81-82.
[2]张宁,廖庆喜.我国小粒径种子播种技术与装备的应用与研究进展[J].中国农机化,2012(1): 93-96,103.
[3]郝金魁,张西群,齐新,等.工厂化育苗技术现状与发展对策[J].江苏农业科学,2012,40(1):349-351.
[4]罗昕,胡斌,黄力烁.气吸式穴盘育苗精量播种机的设计与试验[J].农机化研究,2010,32(11):130- 132,140.
[5]夏红梅,李志伟,甄文斌.气力板式蔬菜排种器设计与试验[J]. 农业机械学报,2010,41(6):56-60.
[6]胡斌,董春旺.气吸式穴盘精量播种机吸嘴吸附性能的试验研究[J].石河子大学学报,2009,27(1): 100-103.
[7]陈进,李耀明,王希强.气吸式排种器吸孔气流场的有限元分析[J].农业机械学报,2007,38(9):59- 62.
[8]毛彬彬,陈书法.基于虚拟样机技术气吸振动式精播装置振动台特性研究[J].农机化研究,2011, 33(7):81-82.
[9]夏红梅,李志伟,牛菊菊.气力滚筒式蔬菜穴盘播种机吸排种动力学模型的研究[J].农业工程学报,2008,24(1):141-146.
[10]苑玮琦,张丽丽.虹膜识别算法的 DSP 移植及其优化[J].微计算机信息,2010,9(26):37-39.
[11]黄健,沈建新.基于DM642的嵌入式虹膜识别系统设计[J].电子技术应用,2012,38(11):31-33.
[12]代健美,耿华芳.基于TPS54310 的SOC电源电路设计[J].电源技术应用,2008,11(5):10-14.
[13]张倩,胡健生.RGB格式数据向BT.656视频标准转换的关键技术[J].液晶与显示,2011,26(5): 640-645.
[14]何伟, 陈彬,张玲.DSP/BIOS 在基于DM642的视频图像处理中的应用[J].信息与电子工程,2006, 4(1):60-62.
[15]赵星星,罗克露.嵌入式实时操作系统移植技术的研究与应用[J].计算机工程,2007,33(17): 90-92.
[16]马德新,徐鹏民.实时操作系统pC/OS-11调度算法的研究[J].微计算机信息,2007,23(6):73-74.
[17]杨超,张冬泉,赵庆志.基于S曲线的步进电机加减速的控制[J].机电工程,2011,28(7):813-817.
[18]浦艳敏.关于数控系统加减速控制的研究[J].科学技术与工程,2009,9(22):6782-6785.
[19]张航伟,陈婵娟.开放式数控系统中数控代码的解释与编译[J].机械设计与制造,2011(2):147-148.
[20]倪颖杰,王律科,军张.基于高性能数据挖掘的网络海量信息处理平台[J].计算机工程与科学,2009, 31(A1):129-132.
[21]杨会玲,杨会伟,王军.基于PCI Express总线的高帧频CMOS相机图像采集系统设计[J].电子技术应用,2009(4):91-97.
[22]陈书明,汪东,陈小文.一种面向多核DSP的小容量紧耦合快速共享数据池[J].计算机学报,2008, 31(10):1737-1744.
[23]王寒涛,赵保军,唐林波.星空背景下的运动点目标轨迹提取[J].光学技术,2009,35(6):810-818.
Study on Speed Characteristics of Embedded UHF Passive RFID System in Seeding Machine
Wang Fengyan1, Dong Zhenzhen1, Liu Zhigang2,3
(1.Henan Polytechnic Institute, Nanyang 473000, China; 2.Nanchang Institute of Science & Technology, Nanchang 330108, China; 3.Nanchang University,Nanchang 330031, China)
Abstract:In order to improve the precision of sowing distance, reduce the seedmeter slipping phenomenon and influence of topography, improve the precision seeding, this paper proposes a new UHF Passive RFID timing optimization method. This method takes into account the metering device of stepless variable speed and wheel slip, according to different geological and terrain, can automatically adjust the seeding machine speed, to achieve the precise control of sowing distance effect. System uses the sowing distance control principle and RFID speed control principle, embedding the RFID into the tire and the metering device, with STC12C5A60S2 as the main control chip, realize data acquisition, processing and adjusting the speed of data. In order to verify the validity and reliability of system, the ordinary machine and a speed adjusting machine sowing test, through the test obtained velocity changes with time curve and the spacing and other test data. Analysis of the data,it can achieve a speed planter of continuous control by using the method of RFID optimal speed , and plant spacing is more obvious than the coefficient of variation of ordinary machine small, seeding accuracy has been greatly improved, which can provide technical reference for optimization design of seeder.
Key words:sowing machine; seeding accuracy; passive RFID; optimization speed
文章编号:1003-188X(2016)06-0031-05
中图分类号:S223.2;TP391.44
文献标识码:A
作者简介:王风燕(1981-),女,河南南阳人,讲师,硕士。通讯作者:刘志刚(1980-),男,湖北天门人,副教授,博士,(E-mail)fiberhome@126.com。
基金项目:国家自然科学基金青年基金项目(51305152)
收稿日期:2015-02-06
猜你喜欢
农业技术与装备(2021年3期)2021-12-01
今日农业(2020年22期)2020-12-14
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
农民致富之友(2019年16期)2019-07-01
农民致富之友(2018年5期)2018-04-13
学习月刊(2015年10期)2015-07-09
乡村科技(2015年1期)2015-02-22
乡村科技(2014年11期)2014-03-04
新疆农垦科技(2014年12期)2014-02-28
