
基于稀疏学习自适应的马铃薯联合收获机优化设计
2016-03-23 06:10孙平平
农机化研究 2016年9期
关键词:自适应
孙平平
(潍坊科技学院,山东 寿光 262700)
基于稀疏学习自适应的马铃薯联合收获机优化设计
孙平平
(潍坊科技学院,山东 寿光262700)
摘要:针对马铃薯收获机由于传动速度偏高造成的收获机阻塞和马铃薯损伤问题,对马铃薯收获机进行了优化设计,提出了一种基于稀疏自适应学习的设计方法,解决了马铃薯联合收获机输送和分级装袋流动不畅和有滞留堆积问题,提高了收获机的生产效率。为了验证马铃薯收获机优化设计后的可靠性,在不同类型的地块上对马铃薯的性能进行了测试,测试地块类型分别为平播旱地和全覆膜双垄播旱地两种。通过试验测试发现:对传动系统进行改进后,联合收获机对全覆膜双垄播旱地和平播旱地的适应性均较好,各项测试指标均比优化之前好,从而验证了传动系统优化的可靠性,对马铃薯联合收获机的改进提供了理论参考。
关键词:马铃薯收获;全覆膜双垄;滞留问题;稀疏学习;误差向量;自适应
0引言
目前,我国马铃薯的收获主要靠人工来完成,包括割秧、刨薯和人工捡拾。在马铃薯的收获期,劳动对象大部分为老年和妇女,人工收获效率低,马铃薯损伤和漏拾率高,劳动强度大,生产成本较高。为了提高马铃薯收获过程的机械自动化水平、降低生产成本、提高收割机的生产效率,需要对当前马铃薯收获机械进行改进。为了实现马铃薯收获机的优化设计,本文对联合收获机马铃薯损伤进行了大量的试验,并在实验数据的处理过程中引入了自适应稀疏学习算法,提高试验数据的可靠性,依据试验数据对马铃薯收获机的传动系统进行了改进,为马铃薯收获机的改进提供了理论依据。
1马铃薯收获机的分类和存在的问题
马铃薯收获机主要包括挖掘机和联合收获机。其中,挖掘机分为畜力和机动两种,可以实现马铃薯的挖掘和分离。挖掘机收获马铃薯后,需要靠人工捡拾,工作效率较低常用的振动式马铃薯挖掘机,如图1所示。
振动式马铃薯挖掘机,主要通过栅条和曲柄连杆的运动实现土壤和马铃薯的分离,其工作时存在振动,可以产生较大的瞬时力,从而增强了破土能力,强化了马铃薯的分选效果。

图1 振动式马铃薯挖掘机
图2所示为自走式马铃薯联合收获机,产地为美国。该联合收获机的行走轮上装有计算机自动导航系统,可以根据卫星定位来实现自主导航功能,智能化程度较高。

图2 自走式马铃薯联合收获机
图3所示为德国研制的一款两行自走式马铃薯收获机。该机除了具有自走功能外,还具有自收集装置,无需人工捡拾,大大提高了工作效率,减少了后续作业所耗时间。
目前,国内对于马铃薯收获机械的研究还不多,其设计大部分是根据经验设计,普遍存在结构简单、配套动力小、可靠性差、作业不稳定等问题,作业时容易产生阻塞,分离能力差;并且马铃薯在收获过程中搓皮严重、损失高。这些问题大部分是由于传动系统的因素引起的,因此需要对传动系统进行改进,提高马铃薯联合收获机对不同地块的自适应能力,提高其作业生产率和作业精度。

图3 自收集式马铃薯联合收获机
2稀疏学习自适应算法
稀疏表示的主要思想是在一个大的样本空间内,对一个类别的事物,由训练样本中同类的样本子空间进行线性表示,表示的系数是稀疏的。为了提高马铃薯联合收获机的自适应能力,利用稀疏学习算法,依据马铃薯力学实验数据对传动系统进行改进,提高马铃薯联合收获机的工作效率。对于一个给定的联合收获机马铃薯损伤实验样本数据,假设数据集为
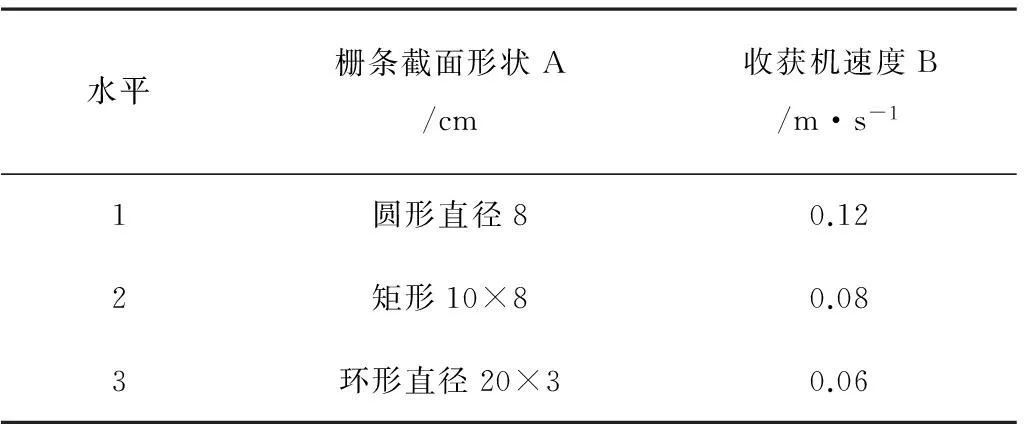
D=[d1,d2,d3,…,dn],D∈Rm×n,m (1) 实验样本数据中包含了n个训练事物,每一列di∈Rm×1则表示一个训练事物,其维数为m×1。假设一个实验测试数据集为y∈Rm×1,则可以用训练样本数据表示为 y≈Dx=x1d1+x2d2+…+xndn (2) 其中,x=[x1,…,xn]∈Rn×1表示训练数据集线性表示测试数据集的系数,但在实际联合收获机马铃薯损伤实验测量过程中会存在测量误差,因此更准确的表达式可以写成 y=Dx+ε (3) 其中,ε∈Rm×1是误差向量,表示由于联合收获机马铃薯损伤实验操作或者实验仪器产生的误差。误差向量可以补偿训练集对测试表示的准确性,由于m (4) 实现联合收获机马铃薯损伤实验测试数据系数的前提是构造超完备字典,本文提出了一种基于自适应学习的超完备字典构造算法。该算法通过寻找最优字典,使字典的稀疏表示对于样本逼近的均方差最小,目标函数构造形式为 (5) 其中,F表示训练样本矩阵,矩阵中对应的每一个列向量为训练样本数据集;D表示待构造的冗余字典,每一个列向量为训练样本;α表示系数矩阵,该矩阵为F在D上分解所得。利用自适应算法,对每个训练样本进行更新,使解的均方差最小。首先利用正交基对超完备字典进行扩展,然后构造训练样本,利用自适应学习对字典进行更新,得到自适应超完备字典,具体步骤如下: 1)构造初始字典数据D0={dk0;k=1,2,…,K}。 2)构造训练样本矩阵F={fi;i=1,2,…,M}。 3)在自适应更新阶段,令j=1,Dj=D0。其中,j表示迭代次数;将F中的数据样本在Dj上进行稀疏分解,得到系数矩阵,其大小为K·M,表达式为αj=OPM(F,Dj)。 4)更新字典Dj,对其中的单个数据集djk进行逐个更新,更新方法如下: (1)选出djk中的数据子集; (2)计算残差Rkj=Ωkj-dkj·αj(k) ; (4)更新原子dkj+1=dkj+1-μ·,μ表示步长因子; (5)对所有的数据集更新完成后,重复 3)、4)步骤,直到得到最优解。 通过以上步骤可以得到马铃薯联合收获机马铃薯损伤实验数据的系数表示,然后利用该数据对马铃薯收获机的传动系统进行改进,步骤如图4所示。得到收获机马铃薯损失试验测试数据的系数表示后,可以利用数据样本对马铃薯的传动数据进行改造,提高马铃薯对环境的自适应能力,降低马铃薯的损伤率和含杂率。通过对传动系统优化设计试验样机,并对样机进行测试,验证优化效果。 图4 马铃薯传动系统改进流程图 3损伤试验和传动系统优化 马铃薯在收获和运输时,由于切伤、跌落、压伤等原因,非常易于造成马铃薯的损伤,为了得到马铃薯机械损伤的各种原因和显著性水平,对收割机的马铃薯损伤进行了实验研究,其测试时的照片如图5所示。 图5 马铃薯机械损伤测试实验 马铃薯在机械筛选的过程中,由于其附着的土壤最后会变得越来越少,薯体和栅条之间发生碰撞,容易产生损失,其影响损伤大小的因素和栅条的形状与速度有关,其正交实验的因素如表1所示。 对不同的影响因素进行组合,利用微机控制万能试验机的参数,控制系统便可以精确地输出收获机的速度。通过多次实验,利用自适应稀疏学习算法对数据进行整合,得到了如表2所示的结果。 表1 马铃薯碰撞试验的正交实验因素表 表2 正交实验结果表 由表2可以看出:在所有实验数据中,只有一次损失率大于10%。因此,在马铃薯联合收获机传动系统设计时不能使用改组数据,损失率最低的组合为A3B1AB2,可以参照该组合对传动系统进行改进。 图6表示改进前的传动系统示意图,其传动方向由箭头所示。该机械传动结构存在传动速度偏高、传动距离也比较长及流动不流畅问题。因此,利用自适应稀疏学习算法的整合数据,对传动系统进行改进,得到了如图7所示改进后的系统图。 图6 传动系统示意图 图7 改进后的传动系统图 根据A3B1AB2数据组合,对变速器Ⅰ、Ⅱ进行了重新设计,降低了传动速度,并去掉了Ⅱ级茎秆分离装置。通过改进,明显地缩短了薯块输送距离,解决了流动不流畅的问题,使整个传动系统更加紧凑、美观。 4自适应马铃薯联合收获机性能测试 为了验证本次研究设计的马铃薯联合收获机的传动系统的性能,按照国家农业行业标准《NY/T 1130-2006 马铃薯收获机械》规定和有关农业机械试验方法,对马铃薯联合收获机的性能进行了测试,测试过程如图8所示。 图8 马铃薯联合收获机性能测试图 为了提高试验测试的有效性和可靠性,测试选择两种地型,一种是全覆膜双垄播旱地,另一种是平播旱地,测试项目包括马铃薯收获机破皮率、含杂率、损失率、伤薯率和生产率。通过测试得到了如表3所示的测试结果。 由测试结果可以看出:对传动系统进行改进后,联合收获机对全覆膜双垄播旱地的适应性较好,各项测试指标均达到精密联合收割机的设计指标,对薯秧、杂草、地膜的分辨能力较强。 表4表示平播旱地试验结果。由测试结果可以看出:对传动系统进行改进后,联合收获机对平播旱地的适应性也较好,各项测试指标均较好,均达到精密联合收割机的设计指标,具有较高的工作效率。 表3全覆膜双垄播旱地试验结果表 Table 3The experimental results table of whole film double ridge sowing dryland 测试项目普通马铃薯联合收获机自适应马铃薯联合收获机生产率0.520.68损失率2.520.69破皮率3.221.51伤薯率2.110.31含杂率3.931.12 表4 平播旱地试验结果表 5结论 1)为了解决马铃薯收获机传动速度偏高造成的马铃薯损失和机械阻塞问题,对马铃薯的传动系统进行了优化设计,并提出了一种基于稀疏学习的自适应优化方法,提高了马铃薯输送和分级装袋的效率。 2)为了验证对马铃薯联合收获机优化设计后的有效性,本文在平播旱地和全覆膜双垄播旱地两种类型的地块上对马铃薯联合收获机的收获性能进行了测试。通过试验测试发现:对传动系统进行改进后,收获机对不同地块的适应性较好,生成率有所提高,破皮率、含杂率、损失率、伤薯率都有了明显的降低,各项测试指标均可以满足精密联合收获机的设计要求。 参考文献: [1]魏宏安,王蒂,连文香,等.4UFD-1400 型马铃薯联合收获机的研制[J].农业工程学报,2013,29(1): 11-17. [2]宋言明,王芬娥.新型马铃薯联合收获机的总体设计[J].甘肃农业大学学报,2009,44(1):151-154. [3]连文香,魏宏安,邵世禄,等.4UFD-1400 型马铃薯联合收获机机架有限元分析[J].甘肃农业大学学报,2010,45(5):146-150. [4]李彦晶,魏宏安,孙广辉,等.4UFD-1400 型马铃薯联合收获机挖掘铲的参数优化[J].甘肃农业大学学报,2011,46(5):132-136. [5]张建,魏宏安. 4M-2型马铃薯联合收获机土薯分离运动仿真[J].甘肃农业大学学报,2009,44(3): 153-157. [6]杨然兵,李国莹,尚书旗,等.机械化挖掘收获部件发展现状与展望[J].农机化研究,2008(9):5-8. [7]刘宝,张东兴,李晶.马铃薯收获机主要问题机理分析及其对策[J].农机化研究,2009,31(1):14-16. [8]王建波,樊啟洲,田延庆,等.马铃薯挖掘机关键部件的研究现状与展望[J].农机化研究,2011,33(1): 244- 248. [9]邵君,尹忠科,王建英.信号稀疏分解中过完备原子库的集合划分[J].铁道学报,2006,28(1):68-71. [10]连学强,丁兴号,闫敬文.基于无下采样Contourlet变换的SAR图像去噪[J]. 仪器仪表学报, 2008, 29(3):512-516. [11]李玉道,杜现军,宋占华,等.棉花秸秆剪切力学性能试验[J].农业工程学报,2011,27(2):124-128. [12]介战,罗四倍,周学建.基于LabVIEW 的联合收割机水稻喂入量遥测试验[J].农业工程学报,2009, 25(S2):87-91. [13]张道林,刁培松,董锋,等.拨禾指式不对行玉米收获装置的试验[J].农业工程学报,2010,26(5): 103- 106. [14]杜现军,李玉道,颜世涛,等.棉秆力学性能试验[J]. 农业机械学报,2011,42(4):87-91. [15]宋占华,肖静,张世福,等.曲柄连杆式棉秆切割试验台设计与试验[J].农业机械学报,2011,42(11): 162-167. [16]王锋德,燕晓辉,董世平,等.我国棉花秸秆收获装备及收储运技术路线分析[J]. 农机化研究,2009, 31(12):217-220. [17]李耀明,秦同娣,陈进,等.玉米茎秆往复切割力学特性试验与分析[J].农业工程学报,2011,27(1): 160-164. [18]宋春华,区颖刚,刘庆庭,等.两段式螺旋扶起机构理论的研究[J].农机化研究,2010,32(11): 34-36. [19]杜现军,李玉道,颜世涛,等.棉秆力学性能试验[J]. 农业机械学报,2011,42(4):87-91. [20]宋占华,肖静,张世福,等.曲柄连杆式棉秆切割试验台设计与试验[J].农业机械学报,2011,42(11): 162-167. [21]王锋德,燕晓辉,董世平,等.我国棉花秸秆收获装备及收储运技术路线分析[J].农机化研究,2009, 31(12):217-220. [22]秦国成,秦贵,张艳红.设施农业装备技术现状及发展趋势[J].农机化研究,2012,34(3):81-82. [23]张宁,廖庆喜.我国小粒径种子播种技术与装备的应用与研究进展[J].中国农机化,2012(1): 93-96,103. [24]郝金魁,张西群,齐新,等.工厂化育苗技术现状与发展对策[J].江苏农业科学,2012,40(1):349-351. Optimum Design of Potato Combine Harvester Based on Sparse Learning Adaptive Sun Pingping (Weifang University of Science and Technology,Shouguang 262700, China) Abstract:For the potato harvester, due to higher transmission speed caused by the harvester blocking and potato injury problems, potato harvester were designed for optimization, and it proposed a design method based on adaptive sparse learning to solve the potato harvesting machine,which is used for conveying and grading and bagging flow.The experimental place is not smooth and is retained in the accumulation of problems, which improved the production efficiency of the harvester. In order to verify potato optimization design of reliability,different types of plots the performance of potato were tested, the test plots were for flat sowing dry and fully covered double ridge sowing dry land. It was found that it improved the transmission system, combine harvester to fully covered double ridge sowing dry peace the adaptability of dryland sowing are better, the test targets than before optimization, thus validating the optimization of transmission system reliability, which provide a theoretical reference for the potato combine harvester improvement. Key words:potato harvest; fully covered double ridge; delay; sparse error vector; adaptive learning 中图分类号:S225.7+1 文献标识码:A 文章编号:1003-188X(2016)09-0131-05 作者简介:孙平平(1977-),女,山东寿光人,讲师,硕士,(E-mail) sunpp1977@sina.com。。 基金项目:山东省自然科学基金项目(ZR2014EEQ019) 收稿日期:2015-08-13









 猜你喜欢
计算机应用(2016年12期)2017-01-13中国教育信息化·基础教育(2016年11期)2016-12-27软件导刊(2016年11期)2016-12-22科技视界(2016年26期)2016-12-17科教导刊·电子版(2016年26期)2016-11-21汽车科技(2016年5期)2016-11-14中国新通信(2016年16期)2016-10-18科教导刊·电子版(2016年21期)2016-08-23电脑知识与技术(2016年15期)2016-07-04电脑知识与技术(2016年13期)2016-06-29
猜你喜欢
计算机应用(2016年12期)2017-01-13中国教育信息化·基础教育(2016年11期)2016-12-27软件导刊(2016年11期)2016-12-22科技视界(2016年26期)2016-12-17科教导刊·电子版(2016年26期)2016-11-21汽车科技(2016年5期)2016-11-14中国新通信(2016年16期)2016-10-18科教导刊·电子版(2016年21期)2016-08-23电脑知识与技术(2016年15期)2016-07-04电脑知识与技术(2016年13期)2016-06-29
