基于射流冲击的穴盘立式取苗器取苗过程的分析研究
2016-03-23 03:19马亚朋
农机化研究 2016年3期
关键词:移栽
高 捷,马亚朋,胡 斌,任 萍,马 振
(石河子大学 机械电气工程学院,新疆 石河子 832000)
基于射流冲击的穴盘立式取苗器取苗过程的分析研究
高捷,马亚朋,胡斌,任萍,马振
(石河子大学 机械电气工程学院,新疆 石河子832000)
摘要:为了提高番茄移栽的自动化水平及无损取苗的效率,以穴盘立式取苗器为载体,对于其射流冲击取苗过程中的苗钵的受力情况及空间流场参数变化进行分析研究,得到理想状态的射流冲击模型,解析出投苗初速度的影响因素。同时,分析了各因素水平的主次关系,证明了零速投苗的可行性,并通过物理试验验证了分析结论。
关键词:移栽;取苗;射流冲击;流场分析;零速投苗
0引言
新疆番茄的生产能力约占全国的90%、出口量已占世界贸易总量的 1/4,已经成为了继美国、意大利之后的世界第三大番茄制品生产和出口基地。年季热量资源不稳定的气候特征是制约新疆作物产量的一个重要因素,在终霜后进行穴盘苗移栽,可减少自然灾害的影响,对气候具有补偿作用。手工作业的大田移栽农艺过程劳动强度大、生产效率低、难以实现大面积作业。因此,实现穴盘苗作物移栽的机械化及自动化成为必然的发展趋势[1-2]。
取苗是番茄移栽作业的关键环节,也是影响番茄种植作业质量和效果的关键技术。国内外学者非常重视自动移栽机取苗装置的研发,在气吸式取苗和机械夹持取苗等方面取得了一定成果;但前者对于秧苗根茎形状尺寸的适应性差,后者存在取苗结构复杂、对基质土壤有一定伤害及无法解决振动等惯性问题[3]。针对以上问题,本文以穴盘立式取苗器为载体,提出了基于射流冲击的取苗方式,以期为提高番茄移栽作业自动化水平及无损取苗的效率提供一种新的思路和方法。
1取苗器结构及工作原理
结合穴盘立式取苗器的工作原理和性能要求,其结构主要分为凸轮装置、滚子推杆、复位弹簧、顶杆气嘴及落盘机构等。工作过程中,电动机带动凸轮轴匀速转动,滚子推杆在凸轮的作用下联接顶杆气嘴向穴盘底部小孔运动,顶进穴盘底部小孔,打破穴盘与钵苗之间的粘结力;同时,中空顶杆通过软管与气动装置连接,末端喷嘴喷射出气体,冲击秧苗底部,使秧苗投苗至输送带,完成整套取苗投苗过程;随后,在弹簧作用下,顶杆复位,凸轮轴继续转动,进行下一次的取苗动作。


1.机架2.凸轮3.凸轮轴4.滚子推杆5.接气软管6.顶杆气嘴
7.复位弹簧8.穴盘9.穴盘滑轨10.落盘机构11.电磁铁
图1取苗机构结构示意图
当整排钵苗被取出后,电磁铁通电吸引落盘机构位移,使穴盘整排下降一格;随后通电截止,落盘机构在弹簧作用下复位,限制穴盘的下降趋势,为再次取苗做准备。
2取苗过程分析研究
取苗过程分为3个阶段:第1阶段为破结,顶盖顶入穴盘小孔,打破钵苗与穴盘内壁之间的粘结力;第2阶段为滑动,钵苗在射流气体的冲击力作用下眼穴盘腔壁滑出穴盘;第3阶段为脱落,钵苗滑出后做抛体运动,落入投苗输送带,完成取苗。
为了探究影响钵苗投苗初速度的影响因素,本文将第2阶段作为重点研究对象进行分析。
2.1射流气体的冲击原理[3]
从气嘴喷出的射流气体到达穴盘的底部,通过穴盘底部的圆形透气口将秧苗从穴盘中吹出,其工作原理图如图2所示。本研究所用气嘴为圆柱形管,因此以圆断面紊流射流为例,来讨论射流运动[4]。
在距喷嘴距离为s处的射流半径为
(1)
其中,r0为喷嘴半径,a为紊流系数,R为穴盘底孔的半径。

图2 射流气体工作原理图
2.2秧苗滑动瞬间的动力学分析[4]
假设取苗第2阶段秧苗与穴盘之间的粘结力已完全打破,这是气体和秧苗、秧苗和穴盘之间以及秧苗自身重力相互作用的一个过程。这时秧苗受到射流气体的冲击产生与穴盘壁相对滑动,对该瞬间钵苗的受力进行分析,建立秧苗的力学模型,如图3所示。
其中,穴盘单一苗孔轴线与水平面的夹角为∂(即穴盘倾角∂),单穴体侧壁与Y轴夹角为β,秧苗在被气体吹出的瞬间受到的射流冲击力为F,穴盘对苗的支持力为P,秧苗自重为G,秧苗和穴盘之间的摩擦力为f。最初,f由两部分组成,秧苗基质与单穴体侧壁间相对运动产生的滑移摩擦力及因基质材料而产生的与穴盘的粘附力。此刻,由于顶杆机构已将粘结力打破,分析时可将后者忽略不计。

图3 射流冲击瞬间秧苗力学模型
列出Y轴上的平衡力方程为
Pcosβ+fsinβ=Gsin∂
(2)
摩擦力f的表达式为
f=μP
(3)
忽略气体黏性、分子碰撞间能量损耗及与外界的热交换,视其为不可压缩的理想状态,射流冲击作用于沿边界层假想的管道中,由伯努利方程得
(4)
作用于秧苗底部的气体推力为
F=P1·πR2
(5)
沿X轴秧苗加速度为
(6)
沿X轴初速度为
v初=a·Δt
(7)
联立上述方程,解得
(8)
其中,Δt为射流持续时间,v1是气体射流冲击核心段横断面平均流速[5]。则有
(9)
由此可知,影响投苗初速度的因素有:紊流系数a、喷射距离s、喷嘴半径r0、喷嘴气流初压强P0、喷嘴气流初速度v0、穴盘苗孔轴线与水平面夹角∂,射流时间为Δt。β由穴盘制造工艺决定,在此认为其为定值;μ是秧苗基质和穴盘的摩擦因数,虽然此因数会因基质材料和含水率的不同而略有不同,但其在移栽农艺条件的限定下是不会有太大改变,亦认为其为定值;m与G由调研得到的秧苗植株平均质量赋值并参与计算;ρ取空气平均密度;P大气取标准大气压下的空气压强。
另外喷嘴处气流压强和速度有相应关系为
(10)
P=P0-P大气
(11)
其中,φ为流速系数,以圆柱形管口为例,φ=0.96[6]。
3影响投苗初速度的各因素的分析
3.1紊流系数a
紊流系数由试验决定,是表示射流流动结构的特征系数,与出口断面上紊流强度及断面上速度分布的均匀性有关。本文以圆柱形管口为例进行计算,a=0.076[6]。
3.2喷嘴气流初压强P0
取s=0.01m,r0=0.002m,∂=90°。另外,经过调研测量取平局值或查阅参考文献得到以下定值:m=0.011 2kg,G=0.112N,β=9.65°,μ=0.6,ρ=1.293kg/m3,P大气=0.1MPa,φ=0.96,Δt=0.2s。代入式(8)~式(11)得到投苗初速度v初与喷嘴气流初压强P0之间的线性关系式为
v初=2 180P0-217.4
(12)
由图4可见:改变喷嘴压强能够明显改变钵苗的投苗初速度,故P0为影响投苗初速度的最关键因素之一,可以通过控制喷嘴压强来实现对于初速度的控制,证明了实现零速投苗的可行性。
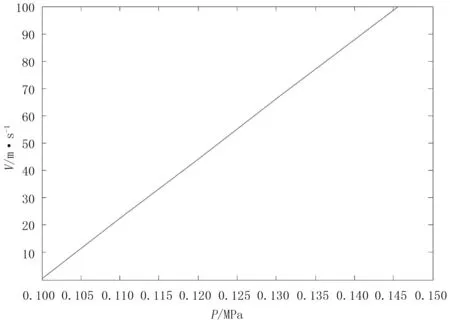
图4 投苗初速度随压强变化曲线
3.3穴盘倾角∂
取s=0.01m、r0=0.002m、P0=0.11MPa,计算可得v0=119m/s,得到v初与∂间的关系式为
v初=17.5-0.78sin∂-2cos∂
(13)
由图5可知:穴盘倾角∂对于秧苗沿轴线投出初速度的影响呈周期性变化,但变化幅度较小,属于影响投苗初速度的非关键因素。

图5 投苗初速度随穴盘倾角变化曲线
3.4喷射距离s
取∂=90°、r0=0.002m、P0=0.11MPa,得到v初与s间的关系式为

(14)
由于空气阻力的存在,喷射距离需控制在一定范围之内。图6表明当喷射距离s在取值0~4cm之间,秧苗的射出初速度的变化情况:v初随s增大而增大,在1.5cm处增加趋势明显减缓并趋向于定值;由于增幅偏小,故喷射距离s属于影响投苗初速度的非关键因素。

图6 投苗初速度随喷射距离变化曲线
3.5喷嘴半径r0
取∂=90°、s =0.01m、P0=0.11MPa,得到v初与喷嘴半径r0之间的关系式为
v初=21.43-
(15)
喷嘴半径不应小于穴盘底孔,图7表明当喷嘴半径在0~4mm之间变化时,投苗初速度随其增大而减小。因变化幅度较小,故喷嘴半径亦认为是影响投苗初速度的非关键因素。

图7 投苗初速度随喷嘴半径变化曲线
4试验
为了验证射流冲击取苗理论分析的正确性,搭建物理实验台进行验证试验[7]。
4.1试验对象与指标
1)试验对象:含水率30%、苗龄58天的里格87-5番茄苗,所用穴盘为128穴黑色育苗盘,钵苗与穴盘之间的粘结力均已打破。
2)试验指标:改变气嘴喷射压力,测量钵苗抛投水平距离d,由此可计算出钵苗投苗初速度。其中,喷嘴距传送带垂直距离为0.2m,传送带距离穴盘水平距离0.1m,传送带宽0.3m。
4.2试验因素及方法
1)通过调整凸轮轴和滚子顶杆的安装初始位置,进行移栽机运动协调试验,验证机构间时序分配的合理性。
2)试验时,选用2mm半径的顶杆喷嘴,喷射时间0.2s,喷射距离3mm,穴盘倾角90°;喷嘴压力分别取0.16、0.18、0.2、0.22、0.24、0.26MPa。 实验结果如表1所示。
试验结果表明: 取苗机构的整个时序分配合理,各机构间运动协调可靠,可实现整排取苗间隔放苗的作业要求;喷嘴压力对于投苗初速度产生较大影响,投苗初速度与喷嘴压力近似成线性关系。

表1 实验结果
5结论
1)基于射流冲击的穴盘立式取苗器结构简单、方案合理,实现高效快速无损取苗,为移栽机取苗器的研制提供了一种新思路。
2)对于射流冲击取苗过程中的苗钵的受力情况以及空间流场参数变化进行分析研究,得到理想状态的射流冲击模型,解析出投苗初速度的表达式。
3)由表达式找出影响投苗速度因素,对于各因素的分析研究得出结论:可通过环境变量及气动参数的控制来实现零速投苗的理想状态。
4)以番茄苗为对象,进行样机运动协调匹配试验和最佳取苗工作参数试验,结果表明:整排取苗间隔放苗机构时序分配合理,各机构间运动协调可靠,投苗初速度与喷嘴压力近似成线性关系,验证了理论分析得出的结论。
参考文献:
[1]胡洁,蒲春玲.兵团番茄产业化发展问题思考[J].新疆农垦经济,2010(1):52-56.
[2]高玉芝,王君玲,李成华.我国旱地育苗移栽机械化面临的问题及应对措施[J].沈阳农业大学学报,2004,35(2):145-147.
[3]李庭.穴盘移栽机自动取苗分苗系统的设计研究[D].石河子:石河子大学,2013.
[4]张国凤等.水稻钵苗在空中和导苗管上的运动特性分析[J].浙江大学报,2009,43(3):529-534.
[5]董志勇.射流力学[M].北京:科学出版社,2005.
[6]刑国清.流体力学泵与风机[M].北京:中国电力出版社,2009.
[7]韩长杰.穴盘苗移栽机自动取喂系统的设计与试验[J].农业工程学报,2013,29(8):51-60.
Abstract ID:1003-188X(2016)03-0047-EA
The Analysis and Research on Pick-up Plug Seedlings Process of Aperture Disk Vertical Pick-up Pevice Based on the Jet Impingement
Gao Jie, Ma Yapeng, Hu Bin, Ren Ping, Ma Zhen
(Machinery and Electricity Engineering College,Shihezi University,Shihezi 832000,China)
Abstract:In order to improve the automation level of tomato transplanting and the efficiency of nondestructive pick-up seedlings, the paper takes aperture disk vertical pick-up device as an example,takes a research on the forces of the seedling pot and the parameters variation of the the flow field during the jet impingement, gets the ideal model of jet impingement, parses out the influence factors about seedlings initial velocity, analyzes the relationship between each factor, proved the feasibility of zero speed off seedling, and verified those conclusion by the physical experiment.
Key words:transplant; seedling; jet impingement; flow field analysis
文章编号:1003-188X(2016)03-0047-04
中图分类号:S223.9;S220.3
文献标识码:A
作者简介:高捷(1989-),男,山东济宁人,硕士研究生,(E-mail) gaojie8902@163.com。通讯作者:胡斌( 1968- ) ,男,湖北英山人,教授,硕士生导师,(E-mail) hb_mac@shzu.edu.cn。
基金项目:国家自然科学基金项目(51365047)
收稿日期:2015-03-11
猜你喜欢
现代园艺(2016年1期)2016-02-23
长江蔬菜·学术版(2015年1期)2015-07-10
山西果树(2015年2期)2015-04-02