
基于DSP的激光互相关测速系统
2016-03-22 07:38阳湘林
时代农机 2016年1期
阳湘林
(益阳市农业机械研究所,湖南益阳 413002)
基于DSP的激光互相关测速系统
阳湘林
(益阳市农业机械研究所,湖南益阳413002)
摘要:提出基于DSP的激光互相关测速方案。以电动机带动的皮带为测速研究对象,对其进行软硬件设计和仿真分析,验证此方案的正确性、可行性和优越性。为物体速度的非接触式在线测量提供一种有效方法,具有较大的理论研究和应用价值。
关键词:激光测速;DSP;互相关测量
互相关测量技术是一种非接触式测量技术,广泛应用于各种物体速度、长度和位移的在线测量,特别适用于高温、有毒、高辐射等恶劣环境或不便接触测量的场合。国内对相关测量技术的研究较晚,所需的此类设备大多依靠进口,且价格昂贵。本文将具有强大数据处理功能的DSP、测量精度较高的相关测量技术与单色性好、方向性好、会聚性好、高亮度的激光技术三者有机结合,提出基于DSP的激光互相关测速方案,并以电动机带动的皮带为测速对象,对其进行软硬件设计和仿真分析。验证此方案的正确性、可行性和优越性,具有较大的理论研究和应用价值。
1 互相关测速原理及测速系统的组成
(1)测速原理。测速原理是利用相距一定距离L的上下游两个传感器X和Y对运动皮带的同一位置点进行信号拾取,这两路信号x(t)和y(t)的波形在理论上是完全一样的,仅存在一个时间差,然后对这两路信号进行互相关运算:


(2)测速系统的组成。测速系统的组成如图1所示,利用激光传感器的发射器和接收器拾取运动皮带的表面随机信号x(t)和y(t),调理电路对拾取的信号进行I/U转化、放大、相敏检波和滤波,再进行数据采集及AD转换,并将其通过输入接口送入DSP,DSP芯片进行互相关运算并通过峰值搜索求出渡越时间,最后算出速度并由LCD液晶显示器输出。

图1 激光相关测速系统(皮带)结构示意图
2 测速系统的硬件设计
测速系统的硬件设计主要包括激光传感器、信号调理电路、数据采集卡、DSP芯片和LCD液晶显示器的设计。
(1)激光传感器的设计。根据运动皮带具体情况和激光本身单色性好、方向性好、会聚性好和高亮度等特点,选择激光传感器,用来拾取被测皮带的表面随机信号,并将这些被皮表面特征(如表面的凹凸等)所调制的随机光信号转换成电信号,然后将其前置放大再送入调理电路。激光传感器主要包括发射器和接收器两大部分,其中发射器由激光器和光学发射头组成,而光学发射头又由发射聚焦镜和分光器组成;接收器则由接收聚焦镜、光电探测器和前置放大器组成,整个传感器的光路结构如图2所示。
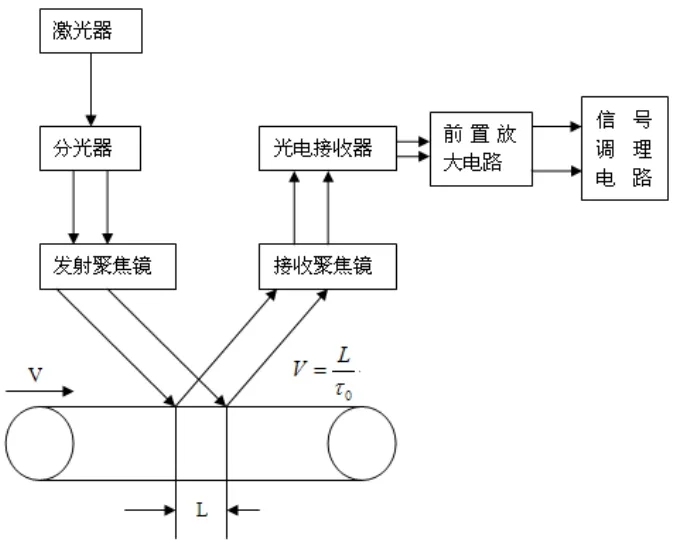
图2 激光传感器的光路结构图
其工作原理为:半导体激光器发射的一束激光经过分光器分成两束平行光,再经发射聚焦镜聚焦后照射在运动皮带的表面,激光光强被运动皮带的表面特征调制后产生散射,此散射光经过接收聚焦镜会聚后被两个光电探测器接收,随后光电探测器将这两路光信号转换成电流信号,最后将其前置放大后送入调理电路。
(2)调理电路设计。光电探测器的光电流信号通过跨阻型前置放大电路后进行I/U转化(将其变成电压信号),然后交流放大,再通过相敏检波、低通滤波、最后再次放大,经过以上调理后可得两路能较好反映皮带表面信息的模拟信号,并把这两路模拟信号传输到数据采集卡。调理电路的原理如图3所示,其结构主要包括I/U转化电路、放大器、相敏检波电路和低通滤波器。测速时应该采用两路完全一致的调理电路以确保调理后的两路随机信号在理论上完全相同的,只相差一个渡越时间,为后继的采样及相关运算做好充分的准备。
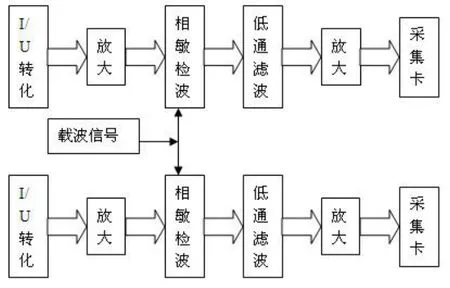
图3 调理电路的原理框图
(3)数据采集卡。数据采集卡的作用是把调理电路送来两路模拟信号通过离散采样转换成数字信号(即A/D转换),并将其从I/O接口送入DSP芯片进行数据处理。数据采集卡是现代数字信号处理中必不可少的一个关键元件。基于不同的应用,可选择不同的数据采集卡。在选择时,主要考虑转换位数、转换时间、采样频率、通道数和价格等因素。根据皮带表面的运动情况和相关分析的要求,本测速系统选择研华PCI-1710HG数据采集卡。
(4)DSP数据处理芯片。反映运动皮带表面特征的信号经过调理和数据采集以后,被送入数据处理芯片DSP进行互相关运算,所以数据处理芯片的性能对测速系统的测量精度和实时性影响很大,同时要考虑成本问题,因此数据处理芯片的选择至关重要,必须权衡利弊综合考虑。互相关运算包含大量的乘法和加法运算,运算量很大,且测速系统对实时性要求较高(要求运算速度快),但对控制功能要求不高,所以本测速系统选择控制能力稍弱但运算能力很强且成本也不高的TMS320VC5402型DSP芯片作为数据处理芯片。
(5)显示输出部分。两路随机信号在DSP中经过互相关运算后得到渡越时间,进而算出运动皮带的速度,再把这个速度送到LCD液晶屏显示出来。本测速系统选用AT320240Q1 型LCD液晶显示器。
3 测速系统的软件设计
测速系统的软件设计包括系统软件、操作界面和互相关算法的设计。
(1)系统软件设计。根据测速系统的原理及功能要求,采用模块化的设计方法,将整个系统分为6个模块:主调度模块、信号拾取模块、调理及采集模块、互相关运算模块、峰值搜索模块和速度显示模块。系统通过主调度模块控制各子模块的工作,从而实现整个系统的测速功能,系统软件设计的主流程如图4所示。
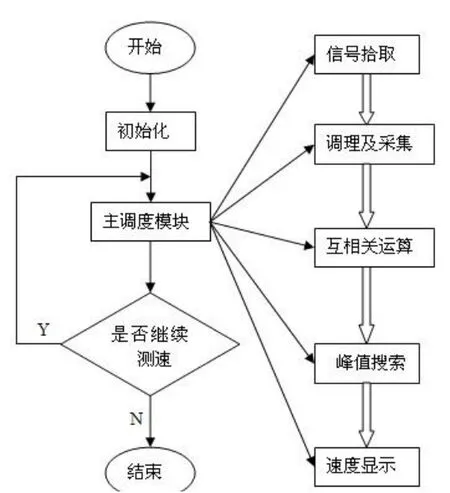
图4 系统软件设计的主流程图
(2)操作界面的设计。操作界面是操作者与测速系统进行交流的接口,操作者通过操作界面可以进行相关参数的设置和修改,而操作界面则把系统运行的实时状态和测量结果实时显示出来,以实现操作者对测速系统的使用与控制。相关测速系统软件的操作界面如图5所示,包括图形显示区、测速参数输入区、测速结果显示区、测速控制区和系统常规信息区。


图6 用快速互相关算法测速的流程图
(4)互相关算法的仿真。因为上下游两激光传感器获得信号的波形完全相同,只相差一个时间差(即相位差),所以取相位相差90°,其它参数完全一样的两路正弦信号作为一组仿真信号,然后再改变采样频率、采样点数、信号的频率和幅值进行四组仿真,仿真的数据如表1所示。根据快速互相关算法的流程与步骤,在Labview上进行仿真。主要的编程步骤如下:①创建两个仿真信号子VI;②创建条件选择结构子VI;③创建补零公式节点子VI;④创建两个FFT子VI;⑤创建复共轭和乘两个子VI;⑥创建Inverse FFT子VI;⑦创建Peak Detector子VI;⑧创建乘和除两个子VI。
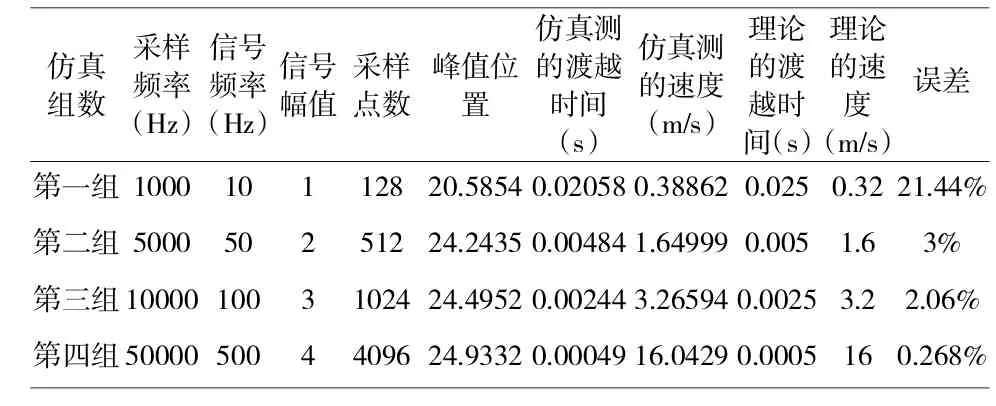
表1 用快速互相关算法测速的仿真数据和结果
最后对所有子VI连线,并输入正确的参数(其中L为8mm保持不变),即可进行仿真,仿真的界面如图7所示。从表1仿真结果可知,此算法能实现两路信号x(t)和y(t)的互相关运算,而且能适应不同采样频率、采样点、信号频率和幅值的互相关运算。此算法在采样频率较低时误差较大,但是当采样频率较高时,其精度还是较高的。从而验证了此算法的正确性、可行性和优越性。
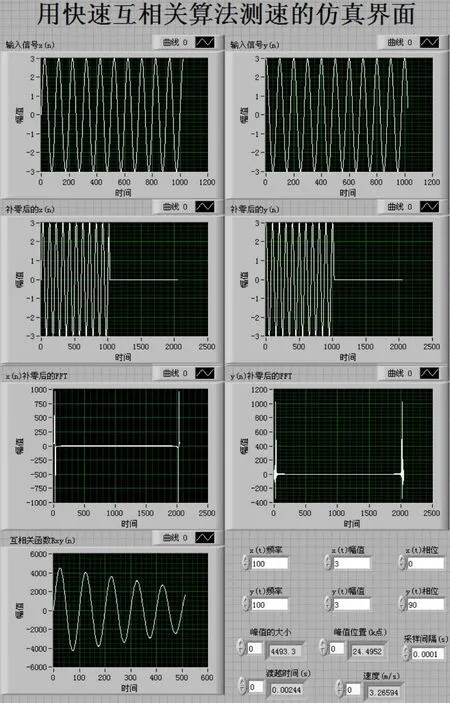
图7 用快速互相关算法测速的仿真界面
4 结论
本文提出了基于DSP的激光互相关测速方案,并对其硬件和软件分别进行设计,通过理论分析和软件仿真验证了此方案的正确性、可行性和优越性。本测速系统为工业领域内速度的非接触式在线测量提供了一种有效方法,具有较大的理论研究和应用价值。由于条件和时间有限,本文仅在实验室以电动机带动的皮带为对象进行研究,如果能在具体环境下对某一具体对象进行测速系统的研制,将具有更大的针对性,势必产生较大的社会效益和经济效益。
参考文献
[1]阳湘林.基于DSP的激光互相关测速系统研究[D].成都:西华大学,2013.
[2]高晶.基于相关测量技术的激光测速系统研究[D].大连:大连理工大学,2008
[3]蔡肯.基于FPGA的固体表面速度激光双焦点互相关测量系统的研制[D].广州:广东工业大学,2006.
[4]韩先一.车辆运行速度测量方法的研究[D].西安:西安理工大学,2004.
The System for Laser Cross-correlation Velocity Measurement Based on DSP
YANG Xiang-lin
(Yiyang Agricultural Machinery Research Institute,Yiyang Hunan 413002,China)
Abstract:In this paper,the scheme of laser cross-correlation velocity measurement based on DSP is proposed,the principle and system composition of the correlation velocity measurement are introduced.The belt driven by motor is chosen as object of velocity measurement,the hardware and software of it are designed,the simulation analysis of it is completed,the correctness,feasibility and superiority of this scheme is verified.This paper provides a kind of effective method for the non-contact on-line measurement of the speed of the object,which has great value to theoretical research and application.
Key words:measurement of velocity by laser;DSP;cross correlation measurement
作者简介:阳湘林(1981-),男,湖南郴州人,硕士研究生,工程师,主要研究方向:机械工程测试技术和汽车拖拉机。
收稿日期:2015-12-19
中图分类号:TP274
文献标识码:A
文章编号:2095-980X(2016)01-0040-03
