
NF-X02轻型履带式拖拉机带农具作业稳定性分析
2016-03-22 07:38邓本荣首元峰龚洵迪黄太平
时代农机 2016年1期
邓本荣,首元峰,龚洵迪,黄太平
(1.郴州职业技术学院,湖南郴州 423000;2.湖南农夫机电有限公司,湖南郴州 423000;3.湖南省农业机械鉴定站,湖南长沙 410004)
NF-X02轻型履带式拖拉机带农具作业稳定性分析
邓本荣1,首元峰2,龚洵迪3,黄太平2
(1.郴州职业技术学院,湖南郴州423000;2.湖南农夫机电有限公司,湖南郴州423000;3.湖南省农业机械鉴定站,湖南长沙410004)
摘要:分析了NF轻型履带式拖拉机带农具在纵、横向坡度上的静态稳定性,推导出纵、横向的极限翻倾角和滑移角,以及相关的影响因素,以此为基础,讨论该机跨田埂、在横向坡道上急转弯行驶、或越障碍物时动态稳定性和注意的事项,为拖拉机的优化结构以及安全操作提供帮助。
关键词:履带拖拉机;纵横向稳定性;翻倾;滑移
农夫机电有限公司研发的系列产品NF-X02(502-802)轻型履带式拖拉机,采用拖拉机直联传动及液压——行星齿轮转向机构,橡胶履带行走结构,接地压力小,通过性能强,操作方便,差速转向,对水田底层损伤轻;动力采用4缸新型柴油机(37~59kW),液压悬挂装置为标准的三点悬挂。主要适应于山丘区水旱田耕作,能完成旋耕、犁耕、起垄、开沟等作业。本文就其稳定性进行分析。
1 静态纵向稳定性
NF-X02轻型履带拖拉机(以下简称履带拖拉机)不带农具远距离移动时通常是用卡车运输到作业地头再短距离移动,该机最大爬坡能力为35°。对履带拖拉机牵引农具或悬挂农具进行纵、横向稳定性分析,是指该机在坡道上匀速直线行驶或制动时的临界翻倾和滑移情况的研究。采用翻倾角和滑移角作为评价指标,并做如下假设:①路面只有纵向坡度或横向坡度,在纵向坡道上沿坡道方向行驶,在横向坡道上沿等高线行驶;②道路无凹凸不平;③略去空气阻力和滚动阻力(土壤被压实,形成轨辙的阻力;克服泥泞的粘性阻力)的影响。
整机纵向稳定性,是指履带拖拉机带农具在纵向坡道上匀速直线行驶或制动时不致产生翻倾和滑移失控的可能性,用纵向极限翻倾角、纵向滑移角来衡量。
NF履带拖拉机带农具的重心在履带支承中心偏后位置的上方,因所带农具不同,其偏后约80~300mm,离地高度约600mm。
1.1匀速上坡时纵向极限翻倾角αlim和纵向滑移角αφ

图1 NF履带拖拉机带牵引农具纵向坡道上行驶
纵向极限翻倾角αlim。履带拖拉机在坡道上匀速上坡时其受力等同于其静止停放在坡道上,此时履带拖拉机的受力图如图1(a),对O1点取矩并整理

式中,G为整机重,N为总反力,b为总反力到后支重轮下O1点的距离,h为整机重心到地面的垂直距离,c为重心到O1点的水平距离,α为坡度角。要使拖拉机不致翻倾,则需要满足的条件b≥0,当b=0,即整机重力G通过O1点,此时为翻倾临界值,称极限翻倾角α1lim。即

结论1:由于悬挂农具,整机重心后移(c↓),其极限翻倾角α1lim与不带农具相比是变小的,即更容易后翻。
纵向滑移角αφ。在纵向坡道上整机能制动住,而不致产生向下滑移的最大坡度角,称纵向滑移角,它是由整机的附着条件决定的。设路面与履带的附着系数为φ,向上行驶的最大坡度为αφ,则最大驱动力Fqmax=Nφ受附着力的限制,不致产生向下滑移的条件:

上式表明,αφ与φ直接相关。干土路面滚动阻力系数f=0.05~0.07,而附着系数φ=0.9~1.1,对应摩擦角42~48°;播种前的耕地、留茬地到生荒地的滚动阻力系数0.05~0.12,附着系数0.6~1.2,对应摩擦角31~50°,故略去阻力系数f的影响。
1.2匀速下坡时纵向极限翻倾角α2lim和纵向滑移角αφ
其受力情况如图1(b)所示,与不带农具相比,因整机重心后移,前翻的可能性变小,即b'>b。对O2点取矩,同理,要使拖拉机不翻倾,则需要满足的条件b'≥0,当b'=0,此时的翻倾角称下坡极限翻倾角α2lim。即

结论2:与上坡时比较,因c'>c,故下坡极限翻倾角大于上坡极限翻倾角,即α2lim>α1lim。
同理,下坡时的纵向滑移角与上坡时的纵向滑移角相同。下坡时,如地面潮湿,通常应先滑移再翻倾,所以需满足条件α2lim<αφ,即c'/h<φ。
讨论:履带拖拉机带农具纵向行驶,①上坡时,整机稳定性主要取决于极限翻倾角α1lim,下坡则主要取决于履带与地面的附着系数φ,即滑移角αφ;②下坡如急刹车,惯性力与前进方向同向,加剧滑移或前翻;③无论上坡还是下坡,视路面干湿情况而定,如雨天,附着系数φ较小,易产生滑移,故为了安全,地头移动时,一定注意其上、下坡度角α应小于30°。
2 静态横向稳定性
横向稳定性是指拖拉机带农具在横向坡道上匀速行驶或制动时不致产生横向翻倾和横向滑移的性能。主要用横向极限翻倾角、横向滑移角来衡量,横向极限翻倾角是指拖拉机停止在横向坡道上时,不致产生横向翻倾的最大坡度角,不致产生滑移的最大坡度角则为横向滑移角。
图2中,假设重心A位于该机某横截面的中心处。F为转弯时的离心力,其方向与转弯半径方向相反,G为整机重量,Y1、Y2分别为地面对左右两侧履带的垂直反力,Z1、Z2分别为地面阻止左右两侧履带的横向滑移力。
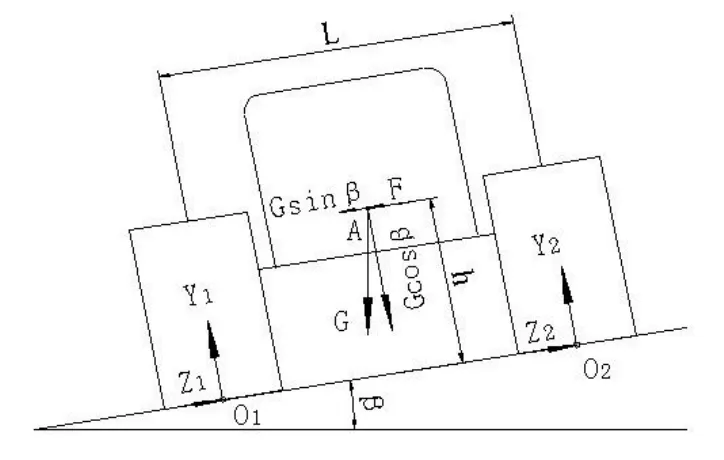
图2 整机在横向坡道上的受力简图
2.1横向侧翻角
如图2,对O1点取矩,整理得

当履带拖拉机悬挂农具在坡度上直线行驶或制动静止时,离心力F为0。若Y2为0,则极限侧翻角为

该机重心离地面高h约600mm,履带间距L为1050mm,理论极限翻角βlim为41.2°。
当急转弯时,离心力F必须考虑,向坡高方向转弯将加大侧翻可能,相反向坡低方向转弯则减小侧翻可能。离心力F=GV2/(gR0)的大小取决于转弯半径R0和转弯时的速度V,式中g为重力加速度,将该式代入式(6),不侧翻的条件是Y2≥0
当β角不大时,cosβ≈1,考虑离心力的坏作用,即向坡高方向转弯,其离心力前的符号“μ”应为“-”,取式(8)两端相等,得到不致侧翻的最大角,称临界侧翻角βK

式(9)表明,考虑离心力的作用后,临界侧翻角βK将小于横向极限侧翻βlim,在高速急转时V↑、R0↓,甚至出现βK=0,也就是说在平地上也可能侧翻。为保证高速急转不侧翻,其条件为

Vk称作转向时不致侧翻的临界速度,表明用小半径R0在平地上转向时,其速度V不得超过该临界速度Vk。
2.2横向滑移角
由图2可见,在横向坡道上,两履带的最大侧向力就是横向附着力,即

式中,PφZ为横向附着力,Z1max、Z2max分别为左右侧履带的最大侧向力,Y1、Y2分别为左右侧履带反力。
当履带拖拉机悬挂农具在坡度上直线行驶或制动静止时,离心力F为0。可求得横向极限滑移角βφlim。

即横向滑移角取决于横向附着系数φZ,当高速急转时,必须考虑离心力的不利作用。
由Gcosβ·φZ≥Gsinβ±F
当β角较小时,cosβ≈1,同理,式(13)右端第二项为离心力的影响值,在其前面取负号“-”以表示向坡高方转向,为不利作用。上式取等号时,β角就成为临界侧滑角βK。
上式表明:在横向坡度上向坡高一侧转向时,其横向滑移角小于正常行驶时的极限滑移角,当高速急转时,其滑移角甚至可能出现小于或等于0度(即β≤0°)的情况,那是极其危险的。
2.3在横向坡道上行驶的稳定性
当履带拖拉机悬挂农具在横向坡道上行驶时,如图3,两侧履带同时受驱动力Pq和横向力Z作用,它们的合力达到该处的附着力时,履带开始滑移。下面分析驱动力Pq和横向力Z是如何影响滑移角的。由图3所示,其合力R为:

设履带两侧地面反力相等,即Y1=Y2=1/2Gcosβ,纵向与横向附着系数相同φZ=φ,则


图3 整机在横向坡道上行驶时履带的受力简图
式中N为地面对履带的总反力(Gcosβ),φ、φZ分别为纵向、横向地面对履带的附着系数。
结论3:在横向坡道上行驶时,其滑移的可能性是平路上的1.41倍,整机稳定性可能先侧滑再侧翻,所以在横向坡道上行驶的稳定是较差的,一定要慢速行驶。
3 动态稳定性分析
履带拖拉机作业时,由于车身振动、转向离心力、急刹惯性力等的作用,所以在动态时倾翻角和滑移角都比静态时小,前述整机的稳定性分析是在简化的条件下进行的,而实际工况是非常复杂的,路面往往有纵横向坡度、急转弯、凹坑或凸台等,且行驶速度、方向也有变化,一般受非稳定力的作用,改变了静稳定所确定的安全条件,因此,在实际复杂情况下的稳定性问题,不能用求几个几何参数的办法来解决,需要根据不同问题,采用不同方法进行研究。
3.1田间作业时的稳定性分析
以悬挂犁和旋耕机作业时进行研究,如图4所示。
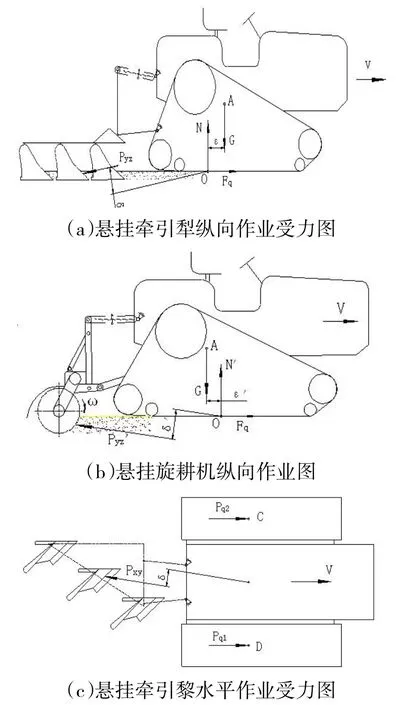
图4 NF履带拖拉机悬挂农具工作时稳定性比较
(1)履带拖拉机悬挂犁作业稳定性分析。图4(a)为悬挂犁组纵向作业情况,在纵垂直面上土壤对犁的合力Pyz方向朝下,其力矩(Pyzδ)使拖拉机产生逆时针旋转趋势,总反力N后移,导致拖拉机抬头现象,严重时失去操作稳定性,解决办法是在车头适当配重。图4(c)为该机在水平面的受力情况,土壤对犁的水平合力Pxy指向未耕地,其力矩(Pxyε)对拖拉机产生顺时针旋转趋势,导致拖拉机头偏向已耕地,易出现第一铧犁耕幅变窄现象,在铧犁配置合理情况下,主要解决办法是横向移动悬挂或加大犁侧板沟壁反力,使力矩(Pxyε)尽可能小,以利于调正瞬心。
(2)履带拖拉机悬挂旋耕机作业稳定性分析。图4(b)为悬挂旋耕机纵向作业情况,在纵垂直面上土壤对旋耕刀的合力Pyz方向朝上,其力矩(Pyz'δ')作用对拖拉机产生顺时针旋转趋势,使土壤对履带的总反力N前移,导致拖拉机架空现象,尤其在旋耕较硬的土壤上,架空现象更明显,可能造成整机失去稳定,解决办法是在拖拉机后头适当配重。旋耕机水平作业,因相邻两旋耕弯刀片相向安装,其左右反力相抵消,不存在偏力矩,故在水平面操作性较好。
3.2履带拖拉机地头转移时动态稳定性

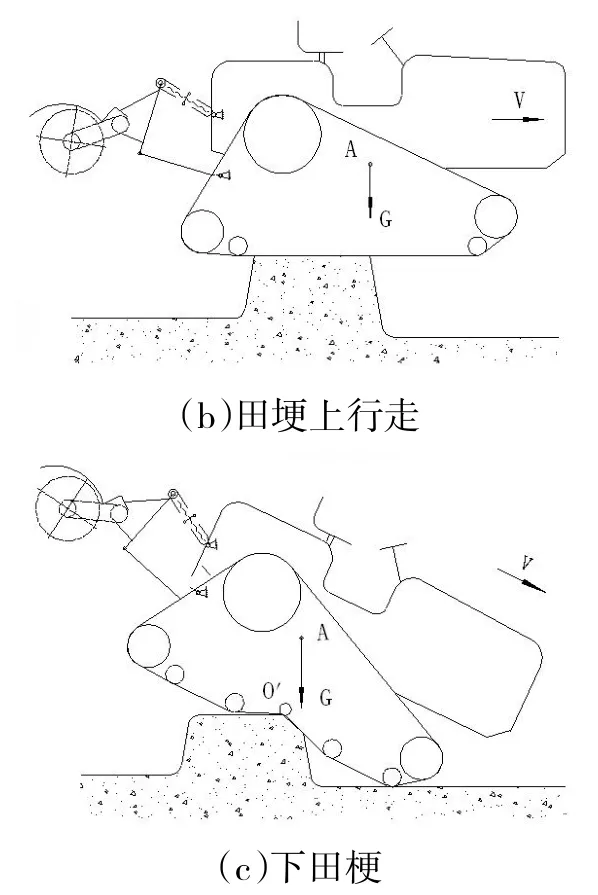
图5 NF履带拖拉机悬挂农具越过田埂示意图
(1)过田埂时稳定性分析。如图5所示,履带拖拉机过田埂分三步走:一是爬上田埂,如同上坡行驶,只是坡度角α由小到大是变化的,到纵向履带中心时,履带凹成三角形状,小支重轮起缓冲作用,坡度角变小;二是当重力G作用线越过点O',整机将顺时针缓慢旋转进入平埂面行驶;三是继续前行,当重力G作用线越过点O',整机顺时针旋转,同时履带趋于中心处,且凹成三角形状,重心下降,缓解快速栽头趋势,其坡度角α由大到小变化,变化率为快→缓→平。通常耕地时,田埂土较湿,以先出现滑移失稳可能性大,如坡度超过30°,应架桥板通过。
(2)拖拉机坡高侧履带越障的动态横向稳定性。当履带拖拉机在等高线横坡道上行驶时,坡高侧履带遇到障碍,随即跳起、再恢复落地,拖拉机不致发生倾翻的条件是:跳起时的动能(0.5Jv20)不能使整机重心的重力作用线越过坡低侧履带纵向中心,反之,则发生倾翻。NF履带拖拉机采用了每侧履带两组支重台车与支架铰接的机构,可前后摆动、还可左右微摆,当障碍物不在履带的中心时,履带将向左或向右小幅摆动,从而缓解了整机颠簸,降低了上跳的动能,有利于防止脱轨。
4 结语
拖拉机的稳定性是作业安全的一项重要性能指标,尤其对坡地作业更为重要;静稳定性只考虑稳定载荷作用,而动稳定性则需要同时考虑稳定载荷和动载荷。上坡作业主要考虑后翻趋势造成的操作失稳,横向坡道作业主要考虑侧滑和侧翻,尤其向坡高侧转向作业时侧翻可能性更大,而下坡作业主要关注的是前方障碍物导致的前翻可能性。总之,地头移动或掉头时,一定低速慢行。
参考文献
[1]镇江农机学院,洛阳农机学院.拖拉机理论[M].北京:中国农业机械出版社,1983.
[2]中国农业机械化科学研究院.农业机械设计手册(上册)[M].北京:机械工业出版社,1988.
The Stability Analysis of Operating NF-XO2 Light Crawler Tractor with Farm Tools
DENG Ben-rong1,SHOU Yuan-feng2,GONG Xun-di3,HUANG Tai-ping3
(1.Chenzhou Vocational and Technical College,Chenzhou,Hunan 423000,China;2.Hunan Farmer Electromechanical Co.Ltd,Chenzhou,Hunan 423000,China;3.Hunan Agriculture Machinery Appraisal Station,Changsha,Hunan 410004,China)
Abstract:This paper analyzes the static stability of NF light-crawler tractor on the longitudinal and lateral slope and concludes that the limit angle of turning over and sliding angle,and the related factors.On this basis,it discusses the notification when tractor passes through the ridge,turns on the traversal ramp,or gets over obstacles,and puts forward precautions for safety operation.
Key words:crawler tractor;longitudinal and lateral stability;rollover;slip
作者简介:邓本荣(1957-),男,湖南郴州人,工学硕士,研究员,主要从事农业机械研究。
收稿日期:2015-12-26
中图分类号:S219.2
文献标识码:A
文章编号:2095-980X(2016)01-0001-03
