基于反馈线性化和预测控制方法的电动汽车用IPMSM速度控制*
2016-03-16 02:47符晓玲刘旭东
电机与控制应用 2016年2期
关键词:电动汽车
符晓玲, 刘旭东
(1. 昌吉学院 物理系,新疆 昌吉 831100;
2. 山东大学 控制科学与工程学院,山东 济南 250061)
基于反馈线性化和预测控制方法的电动汽车用IPMSM速度控制*
符晓玲1,2,刘旭东2
(1. 昌吉学院 物理系,新疆 昌吉831100;
2. 山东大学 控制科学与工程学院,山东 济南250061)
摘要:提出了一种新型的电动汽车用内置式永磁同步电机(IPMSM)的转速跟踪控制方法。首先应用反馈线性化理论,通过坐标变换和非线性状态反馈,实现了IPMSM控制系统的输入输出线性化,将原系统分解为两个线性子系统: 转速线性子系统和励磁电流线性子系统;然后根据模型预测控制理论,通过推导预测模型和定义的性能指标函数,求得IPMSM控制系统的转速控制器。仿真结果表明,提出的控制方法具有良好的转速跟踪性能和鲁棒性,有助于提高电动汽车在复杂环境和工况下运行的稳定性。
关键词:内置式永磁同步电机; 反馈线性化; 模型预测控制; 电动汽车
0引言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因具有效率高、比功率大、功率因数高、可靠性高和便于维护等特点,所以在电动汽车等应用领域已被认为具有与异步电动机相竞争的巨大潜力[1]。特别是内置式永磁同步电机(IPMSM),因其具有凸极效应而产生磁阻转矩,使其具有更宽的调速范围,更加适用于电动汽车驱动系统中。虽然PMSM具有上述优点,但电动汽车运行时路况复杂,工作环境复杂多变,对其驱动电机系统的性能要求极为苛刻。传统的基于PI的矢量控制方法,结构简单、稳定可靠,目前在电机控制系统中应用最为广泛。PI调节器原理上是一种线性调节器,提高比例增益可以提高系统动态性能,但过大的增益会带来噪声、超调及振荡,影响系统稳定性,实际应用中很难兼顾响应的快速性和稳定性,已不能满足对电机高性能的要求。
近年来,随着控制理论的快速发展,一些先进的控制方法被应用到PMSM控制系统中并取得了大量的研究成果,如: 反馈线性化控制[2-3]、滑模控制[4]、反步控制[5]、自抗扰控制[6]、无源性控制[7]、模型预测控制[8-9]等。其中,模型预测控制方法具有控制效果好、鲁棒性强、对模型精确性要求不高等优点,得到越来越多的研究人员的重视。模型预测控制利用系统的输入输出数据预测未来时刻的输出,采用滚动优化策略,使模型失配、畸变、干扰等引起的不确定性及时得到弥补,提高了系统的抗扰动性和适应性,而且对模型精确度要求不高,更加适用于复杂工业控制。目前针对PMSM控制系统的预测控制研究主要是建立在系统线性模型的基础上,通过忽略非线性模型中状态量的耦合项,得到近似的线性模型,而直接针对非线性系统模型的预测控制方法还没有得到很好的解决,如文献[10]中,将PMSM数学模型中速度与q轴电流的乘积为扰动项,忽略速度与d轴电流的乘积项;文献[11]中,忽略了速度与d轴电流的耦合,得到了预测模型,并设计了PMSM转速控制器;文献[12-13]针对表面式PMSM提出了基于反馈线性化方法,将系统表示成了一个线性模型,并采用模型预测控制方法,设计了速度跟踪控制器。
本文基于反馈线性化理论,针对IPMSM速度控制系统,通过非线性反馈和坐标变换,将原系统分解为两个线性子系统模型,然后采用模型预测控制方法,通过推导预测模型和定义的性能指标函数,求得上述线性系统的预测控制器,进而求得IPMSM控制系统的转速跟踪控制器。仿真结果表明本文提出的基于反馈线性化和模型预测方法的IPMSM速度控制器具有很好的稳态和动态性能,能够实现转速的快速跟踪,并具有良好的抗负载扰动性能,而且控制器的参数容易调节。
1IPMSM的反馈线性化
按转子磁场定向理论,IPMSM在d-q同步旋转坐标系下的数学模型可表示为

(1)
式中:Ld、Lq——dq同步旋转坐标系下的定子电感;
id、iq、ud、uq——分别为dq坐标系下的定子电流和电压;
Rs——定子电阻;
np——极对数;
ω——转子机械角速度;
Φ——永磁体产生的磁链;
Jm——转动惯量;
τL——负载转矩;
λ——摩擦因数。
取状态变量x=(x1x2x3)T=(idiqω)T,输入变量u=(uduq)T,输出变量y=(y1y2)T=(ωid)T,并将负载转矩作为扰动项,忽略负载转矩项,则由式(1)得

(2)
其中

采用反馈线性化理论,首先对系统输出变量y1、y2求导,直到出现输入变量。



(3)
(4)
根据微分几何理论可得,系统输出变量y1,y2对输入变量的相对阶分别为r1=2,r2=1。
令






(5)
式中:v=[v1v2]T——线性化系统虚拟输入变量。
令a=[a1(x)a2(x)]T,
u=b-1(x)(-a(x)+v)
(6)
令

(7)
经过坐标变换,可得IPMSM控制系统的线性模型

(8)
将式(8)重新写成状态空间方程的形式可表示为
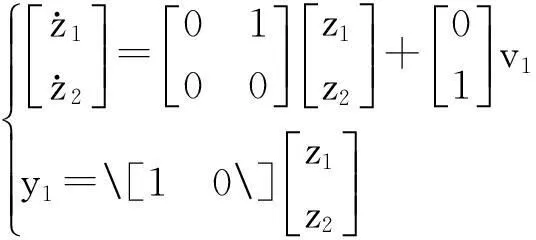
(9)
(10)
由此,IPMSM系统的非线性模型[式(2)]分解成了两个线性子系统: 转速线性子系统[式(9)]和励磁电流线性子系统[式(10)]。
2IPMSM的模型预测控制器
根据模型预测控制原理,通过建立预测模型,并定义成本函数,求解上述线性系统的预测控制器。
2.1 转速线性子系统控制器设计
首先根据转速线性子系统式(9),将其离散化得

(11)
(12)

y1(k)=Cz(k)
(13)
式中:T1——预测周期,令预测时域和控制时域分别为Np1和Nc1,并且在采样时刻k,当i>Nc1-1,v1(k+i)保持不变,i=0,1,…,Np1-1。
为了减小计算量,本文取Np1=3,Nc1=1,可得v1(k)=v1(k+1)=v1(k+2),因此预测的状态量z(k+i+1)为

(14)
基于预测状态变量式(14),预测输出量y1(k+i+1)可写为

(15)
定义
Y1=[y1(k+1)y1(k+2)y1(k+3)]T=
[ω(k+1)ω(k+2)ω(k+3)]T
(16)
由于Nc1=1,令V1(k)=v1(k),进而,式(15)可表示为
Y1=Fz(k)+φV1(k)
(17)
其中:F=[CACA2CA3]T;φ=[CBCAB+CBCA2B+CAB+CB]T
模型预测控制器的设计目标是使得预测的输出量ω(k+i)能够尽快地达到期望的转速值ω*(k)。 根据文献[14],定义成本函数J:

(18)
式中: rs——表示包含给定参考信号的矢量,则rs=[ω*ω*ω*];


(19)
由式(19)可得,IPMSM转速线性子系统的虚拟控制输入:

(20)
2.2 励磁电流线性子系统控制器设计
将励磁电流线性子系统式(10)离散化得

(21)
式中:T2——预测周期,令预测时域和控制时域分别为Np2和Nc2。
取Np2=3,Nc2=1,根据模型预测控制原理,同理可得,IPMSM励磁电流线性子系统的虚拟控制输入:

(22)

r2——表示控制输入的权重系数。
最后,将式(20)和式(22)代入式(6)中,可得IPMSM控制系统的速度控制器。
3仿真验证
在MATLAB/Simulink下建立PMSM控制系统的仿真模型,系统结构如图1所示。控制器改变了传统的矢量控制中转速环和电流环级联的控制结构。PMSM控制系统参数如下: 额定转矩为3.32N·m,最大转速为4600r/min,极对数为8,转动惯量为0.0011kg·m2,摩擦系数为0.01,定子电阻为0.97Ω,d轴定子电感为0.0054H,q轴定子电感为0.009H,永磁体磁通为0.1Wb。
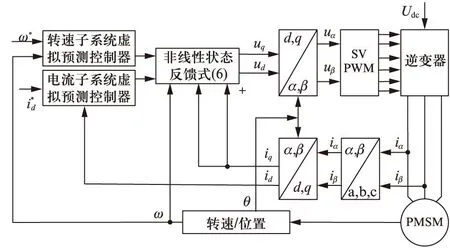
图1 PMSM控制系统结构框图
取预测周期T1=T2=500μs,PWM频率f=10kHz,并将本文提出的基于反馈线性化和预测控制方法与基于PI的矢量控制方法对比。图2为给定转速100rad/s,负载转矩初始值为1N·m,t=0.2s时,负载转矩增加到3N·m,其他参数无扰动时两种方法对应的转速响应曲线;图3为对应的d轴电流曲线,图4为对应的q轴电流曲线。
从图2~4中可看出,本文设计的控制器转速和dq轴电流响应速度更快,且在负载变化时转速波动较小,可更快地恢复到给定值,具有更强的抗负载扰动性,特别适合于电动汽车等负载转矩多变的场合。
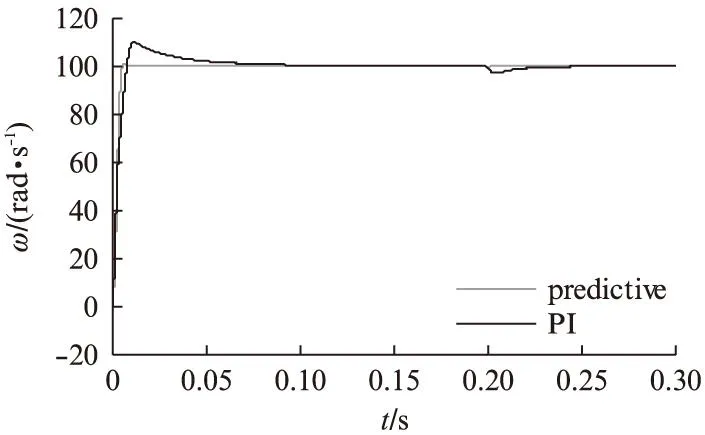
图2 转速响应曲线

图3 d轴电流响应曲线
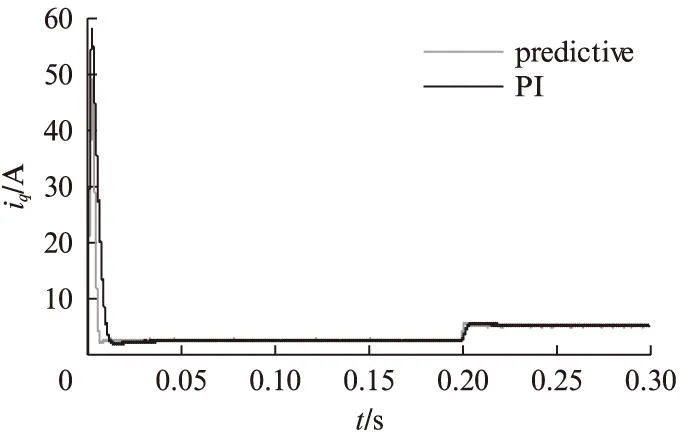
图4 q轴电流响应曲线
由于电动汽车运行环境复杂,电机参数易发生变化,为了验证本文提出的控制器在参数变化时转速跟踪性能,将电机模型中的电机转动惯量变为2Jm,摩擦因数变为2λ,控制器中的电机参数不变,图5为对应的转速曲线,图6为对应的dq轴电流曲线。
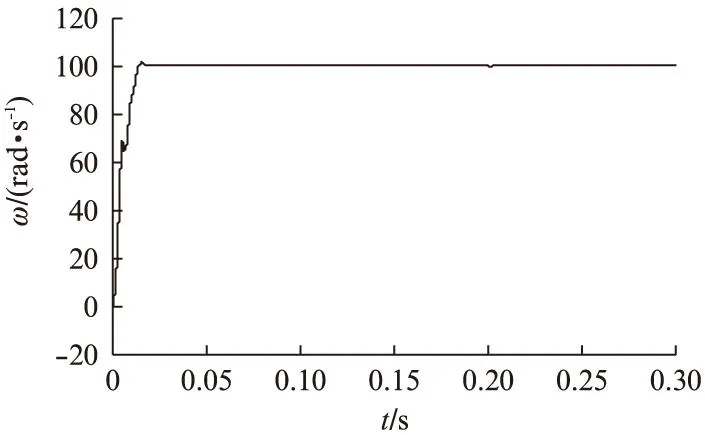
图5 参数变化时转速响应曲线
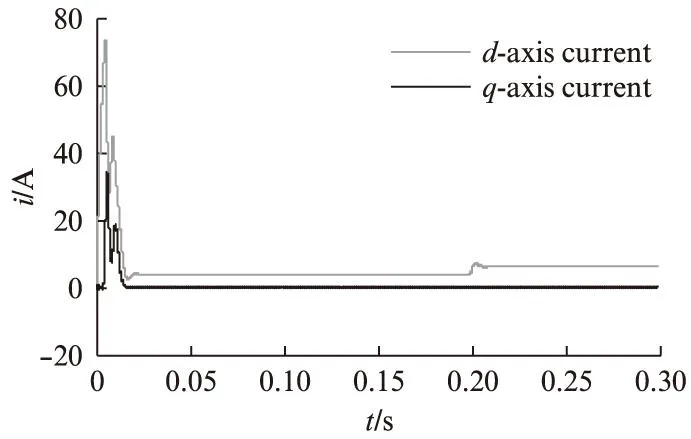
图6 参数变化时dq轴电流响应曲线
从图5、6中看出,电机参数变化后,本文设计的控制器仍然具有较好的转速跟踪性能,鲁棒性较强。
4结语
本文提出了一种基于反馈线性化理论和模型预测控制方法的电动汽车用IPMSM的转速跟踪控制方法。通过反馈线性化将复杂的IPMSM非线性系统分解为两个线性化子系统,然后根据线性系统的模型预测控制方法,设计了虚拟控制器,最后得到了IPMSM控制系统的转速跟踪控制器。仿真结果表明,本文提出的方法响应速度快,在负载扰动和参数变化时,具有较强的抗扰动性能,而且控制器中的参数容易调节,适用于电动汽车等对电机驱动系统要求高的场合。下一步的研究工作是采用dSPACE试验平台,将本文提出的方法应用于实际的电机控制中,通过试验验证其有效性。
【参 考 文 献】
[1]EHSANI M, GAO Y, EMADI A.现代电动汽车、混合动力电动汽车和燃料电池车——基本原理、理论和设计[M].倪光正,倪培宏,熊素铭,译,北京: 机械工业出版社,2012.
[2]GRCAR B, CAFUTA P, ZNIDARIC M. Nonlinear control of synchronous servo drive[J]. IEEE Trans on Control Systems Technology, 1996,4(2): 177-184.
[3]刘贤兴,卜言柱,胡育文.基于精确线性化解耦的永磁同步电机空间矢量调制系统[J].中国电机工程学报,2007,27(30): 55-59.
[4]ZHANG X G, SUN L Z, ZHAO K, et al. Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques[J]. IEEE Trans on Power Electronics, 2013,28(3) : 1358-1365.
[5]KARABACAK M, ESKIKURT H I. Speed and current regulation of a permanent magnet synchronous motor via nonlinear and adaptive backstepping control[J]. Mathematical and Computer Modelling, 2011(53): 2015-2030.
[6]WANG S. ADRC and Feedforward Hybrid Control System of PMSM [J]. Mathematical Problems in Engineering, 2013(12),1-12.
[7]孙静,张承慧,裴文卉.考虑铁损的电动汽车用永磁同步电机Hamilton镇定控制[J].控制与决策,2012,27(12): 1899-1902,1906.
[8]CHAN S, WANG L P, ROGERS E. A cascade MPC control structure for a PMSM with speed ripple minimization[J]. IEEE Trans on Industrial Electronics, 2013,60(8): 2978-2987.
[9]LIU H X, LI S H. Speed control for PMSM servo system using predictive functional control and extended state observer[J]. IEEE Trans on Industrial Electronics, 2012,59(2): 1171-1183.
[10]BOLOGNANI S, PERETTI L, ZIGLIOTTO M. Design and implementation of model predictive control for electrical motor drives[J]. IEEE Trans on Industrial Electronics, 2009,56(6): 1925-1936.
[11]FAN Z H, LI S H. Model predictive control method based on Permanent Magnet Synchronous Motor speed regulation system[C]∥Control Conference(CCC), 31stChinese, 2012: 4412-4417.
[12]林辉,王永宾.非线性永磁同步电动机约束预测控制[J].微特电机,2010(11): 43-46.
[13]孔小兵,刘向杰.永磁同步电机高效非线性模型预测控制[J].自动化学报,2014,40(9): 1958-1966.
[14]WANG L P. Model predictive control system design and implementation using MATLAB[J]. Springer Berlin, 2009,39(12): 110-114.
Speed Control of IPMSM for Electric Vehicle Based on Feedback
Linearization and Predictive Control Method
FUXiaoling1,2,LIUXudong2
(1. Department of Physics, Changji University, Changji 831100, China;
2. School of Control Science and Engineering, Shandong University, Jinan 250061, China)
Abstract:Proposed a novel speed tracking control method of interior permanent magnet synchronous motor (IPMSM) for the electric vehicle. Firstly, according the Feedback Linearization, the input and output linearization of the IPMSM control system was realized with nonlinear state feedback and coordinates transformation, and the control system was decomposed into two linear subsystem: speed linear subsystem and current linear subsystem. Then, based on the model predictive control theory, by the way of deducing the predictive model and defining the cost function, the speed controller was derived. The simulation results showed the control method proposed had good speed tracking performance and robustness, which contributed to improve the stability of electric vehicle in complicate environment and conditions.
Key words:interior permanent magnet synchronous motor (IPMSM); feedback linearization; model predictive control; electric vehicle
收稿日期:2015-08-17
中图分类号:TM 351
文献标志码:A
文章编号:1673-6540(2016)02- 0067- 05
作者简介:符晓玲(1977—),女,博士,讲师,研究方向为电动汽车能量管理、驱动系统控制等。刘旭东(1987—),男,博士生,研究方向为电动汽车驱动系统控制、非线性控制等。
*基金项目:新疆维吾尔自治区自然科学基金面上项目资助(201318101-16)
猜你喜欢
消费电子(2022年7期)2022-10-31
汽车实用技术(2022年19期)2022-10-19
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
系统管理学报(2018年2期)2018-08-13
电子制作(2017年20期)2017-04-26
海外星云(2016年17期)2016-12-01
现代工业经济和信息化(2016年1期)2016-05-17
专用汽车(2016年1期)2016-03-01
中国资源综合利用(2016年2期)2016-01-22