一种应用输入成型的敏捷卫星快速姿态机动控制方法
2016-03-16 07:09:23周伟敏廖瑛杨雅君朱庆华
航天器工程 2016年4期
周伟敏 廖瑛 杨雅君 朱庆华
(1 国防科学技术大学航天科学与工程学院,长沙 410073)(2 上海航天技术研究院,上海 201109)
一种应用输入成型的敏捷卫星快速姿态机动控制方法
周伟敏1,2廖瑛1杨雅君1朱庆华3,4
(1 国防科学技术大学航天科学与工程学院,长沙 410073)(2 上海航天技术研究院,上海 201109)
(3 上海市空间智能控制技术重点实验室,上海 201109) (4 上海航天控制技术研究所,上海 201109)
敏捷卫星对姿态机动能力的快速性和稳定性提出了更高的要求,为此,提出一种应用输入成型的卫星姿态机动控制方法。通过引入比例-微分(PD)反馈加力矩前馈的复合控制,以及采用输入成型器对规划的原始姿态路径控制指令进行调制,使卫星控制后期稳定度得到提高,并能有效抑制挠性部件的振动。数学仿真验证的结果表明:对卫星姿态机动路径的规划和输入成型调制,可以在实现快速机动的同时,有效抑制挠性结构振动,缩短姿态稳定时间,为有效载荷提供更多的可工作时间和高精度、高稳定度的工作环境。
敏捷卫星;姿态机动;输入成型;路径规划;挠性结构振动抑制;复合控制
1 引言
在当前卫星对地观测任务中,大多数的观测目标(如灾害和灾难)都是突发事态。为提高遥感数据的实时性,需要单颗卫星具备较强的姿态机动能力,以增加观测的时间分辨率和覆盖范围,这类卫星一般称为敏捷卫星(Agile Satellite)[1]。对于大角度姿态快速机动与快速稳定卫星,控制系统必须解决以下两个问题:一是实现卫星绕任意轴的快速机动能力,这样可以根据需要快速获取地面任意目标的图像数据,解决措施包括采用更大力矩的执行机构和改进机动控制算法;二是实现姿态机动后的快速稳定,使卫星姿态迅速满足有效载荷工作的要求,增加有效载荷可工作时间,解决措施包括合理规划机动路径、采取挠性结构抑制与执行机构微振动隔离等措施[2-4]。
文献[5]中将动量轮和喷气控制相结合研究了敏捷卫星姿态快速机动问题,文献[6]中提出了使用反作用飞轮的近最小时间特征轴旋转姿态机动方案,这2种方案都是基于反馈控制。在挠性振动抑制方面,输入成型技术在航天工程中得到了广泛的应用。文献[7]中通过数学仿真和地面试验均验证了此技术对抑制挠性振动的明显效果。文献[8]中研究了脉冲调宽调频(PWPF)与输入成型结合的方法在卫星喷气姿态机动中的应用,数学仿真表明了输入成型技术在完成姿态刚体运动的同时,还抑制了挠性附件的振动。文献[9-11]中考虑了负载的挠性因素,分别采用输入成型技术和分力合成方法,对太阳翼驱动电机的原始指令转角进行调制处理,实现了太阳翼定位和挠性抑制的双重目的。
本文针对高精度对地遥感敏捷卫星的姿态控制要求,提出一种姿态机动控制方法。首先,采用比例-微分(PD)反馈加力矩前馈的复合控制实现机动控制;然后,考虑敏捷卫星上挠性部件的影响,通过采用输入成型器对大角度姿态机动路径进行调制,实现挠性振动在姿态机动到位时的大幅度衰减;最后,通过数学仿真验证了本文方法的可行性。与已有研究结果相比,本文方法不仅解决了敏捷卫星姿态快速机动的问题,同时还能有效地抑制星载挠性太阳翼的振动,缩短快速机动后的姿态稳定时间,可为敏捷卫星的工程应用提供参考。
2 敏捷卫星动力学模型和姿态控制方案
2.1 刚挠耦合动力学建模
敏捷卫星系统动力学模型由卫星本体转动方程和挠性部件(太阳翼)结构振动方程组成,见式(1)。
(1)
式中:上标“×”表示叉乘运算;卫星相对惯性系的角速度ω∈3×1;太阳翼挠性振动模态坐标η∈n×1;执行机构角动量hw∈3×1;卫星受到的环境力矩Td∈3×1;执行机构控制力矩Tc∈3×1;卫星的惯量矩阵I∈3×3;太阳翼结构振动与星体转动运动的耦合系数Fb∈3×n;太阳翼的约束模态阻尼比ξ∈n×n;太阳翼的约束模态频率Ω∈n×n;n为模态阶数。

(2)
(3)
根据式(3)即可计算得到系统的振动频率和阻尼比。需要注意的是,经过刚挠动力学耦合之后,控制系统和挠性模态的非约束模态频率和阻尼比,均不等于各自原来的约束模态频率和阻尼比。
2.2 姿态控制算法
为适用于卫星大角度姿态机动,姿态控制律设计主要基于四元素开展,它由1个标量q0和3个矢量Q=[q1q2q3]T组成,即
(4)

采用四元素表示的卫星姿态运动方程为
(5)
在工程上,卫星姿态控制通常采用PD反馈算法,即
(6)
式中:Tc1为反馈控制力矩;Kp为比例系数;Kd为微分系数;ΔQ为误差四元素;Δω为角速度误差。
此外,为实现对机动路径的快速跟踪,本文引入机动力矩直接前馈,即
(7)

2.3 姿态路径规划
姿态机动控制要合理设计机动路径,由于卫星快速姿态机动的最终目标是机动到既定目标时姿态角速度收敛为零,因此采用如图1所示“加速+减速”的方式作为规划姿态机动路径,其中,tm为不同控制路径的切换时间。
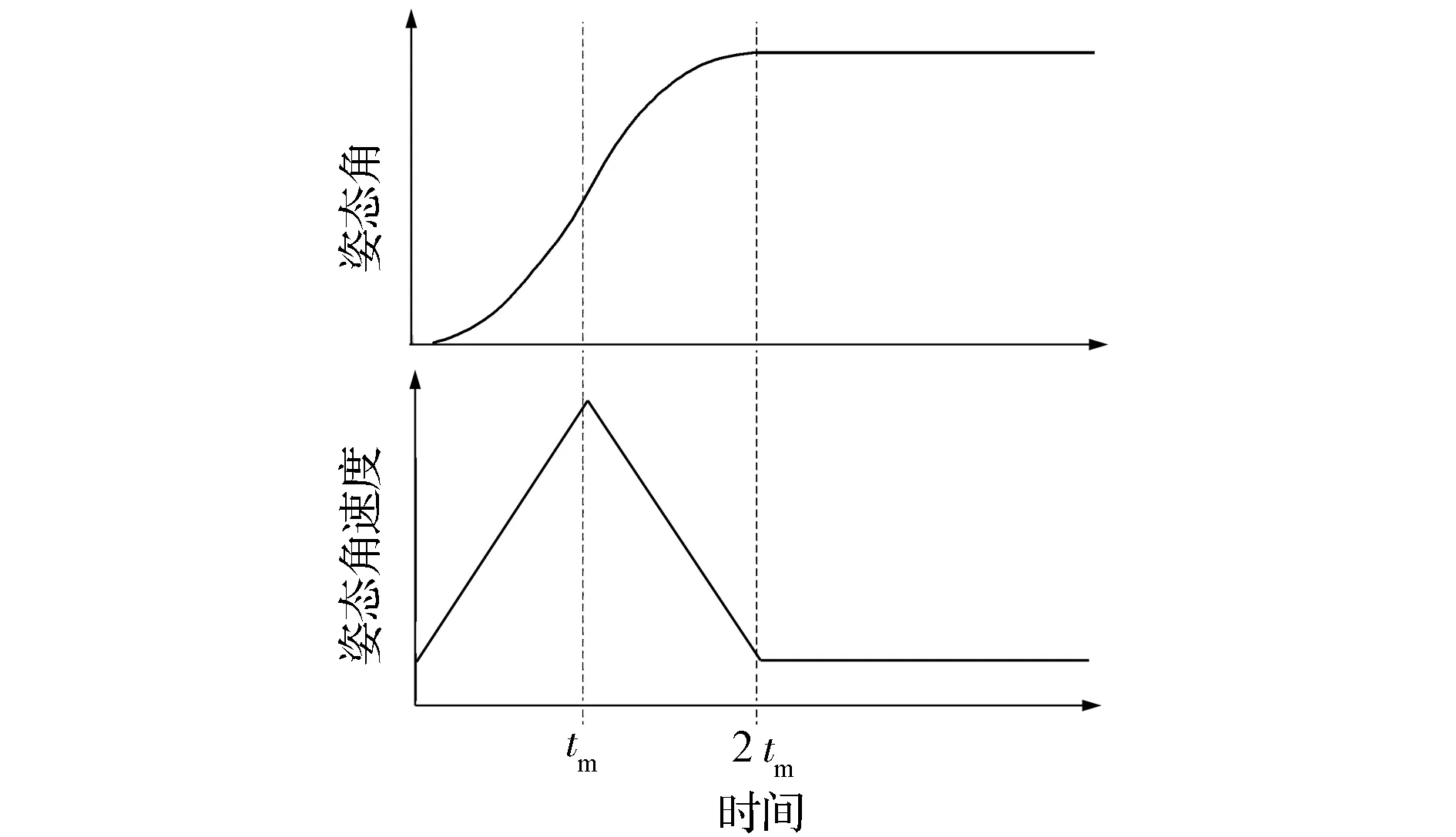
图1 姿态角和姿态角速度规划路径示意Fig.1 Path programming of attitude angle and angular velocity
在图2所示的路径规划方式中,卫星姿态机动时首先利用执行机构最大输出力矩加速和减速,期间的指令姿态角、指令姿态角速度、控制时间分别如下(以滚动轴x为例)。
加速段:
(8)

减速段:
(9)
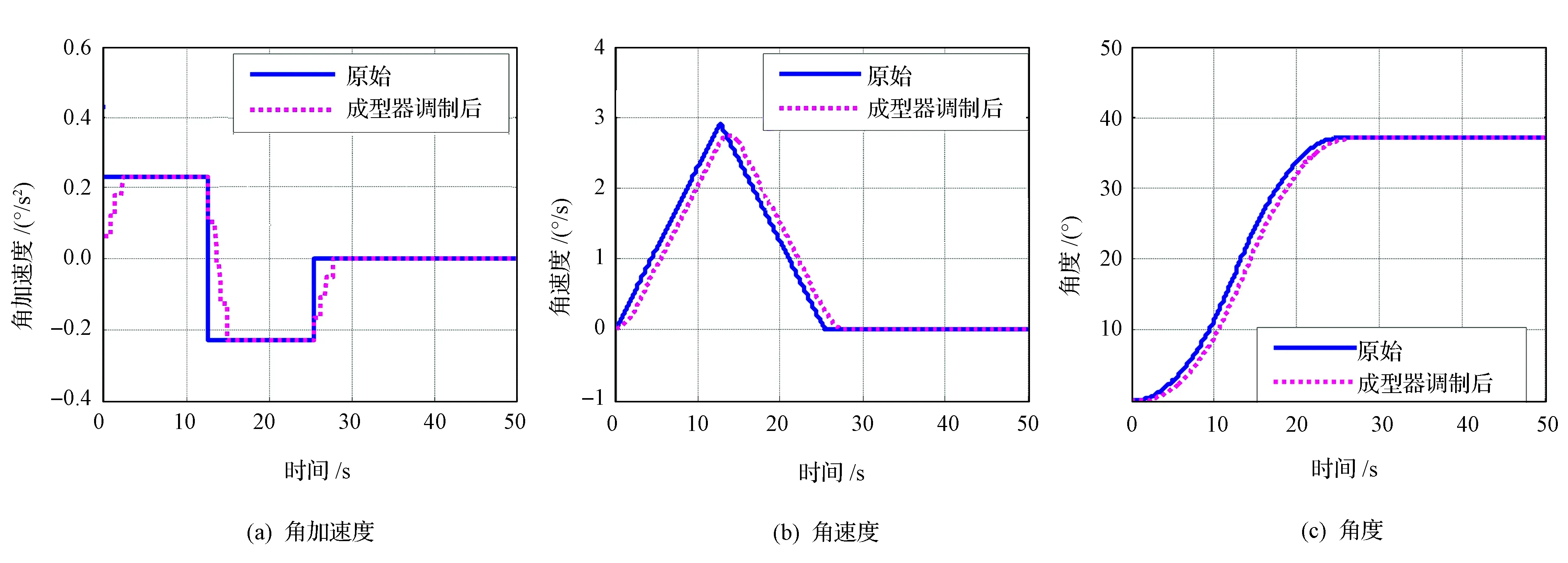
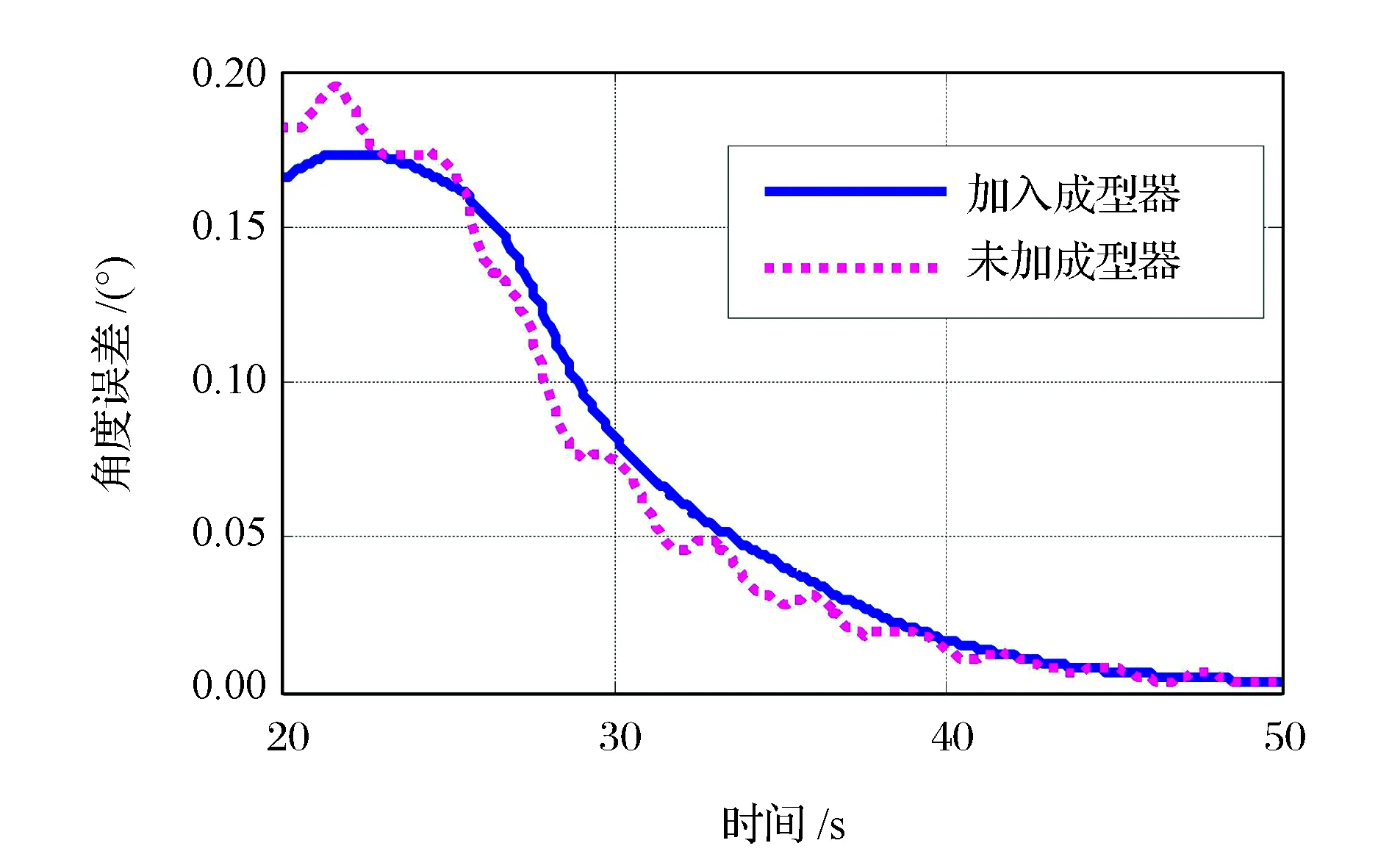
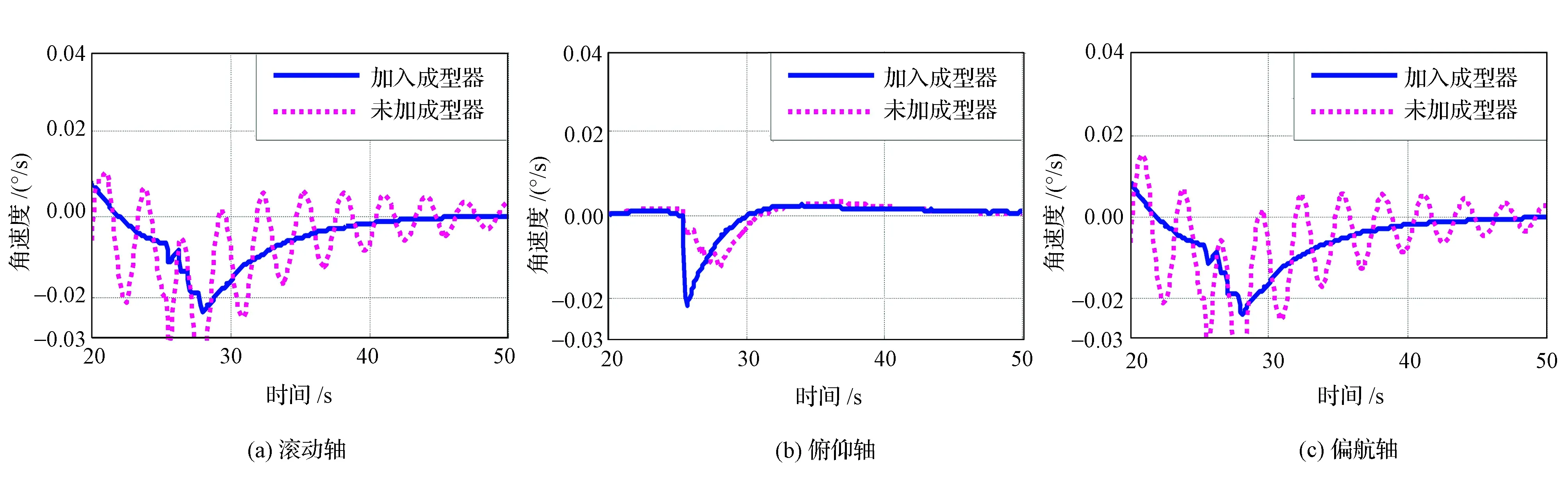
式中:φf为目标机动角;tm 经路径规划后,指令姿态角、指令姿态角速度、控制时间如下。 (10) 为避免挠性结构振动,缩短姿态稳定时间,本文采用输入成型技术对式(8)和式(9)规划出的原始机动路径进行调制,由此本文的控制方案归纳为图2所示。第3节将重点对输入成型器的使用进行说明。 注:IS分别为绕欧拉轴转过的角度、角速度和角加速度。 图2 姿态机动控制回路框图Fig.2 Block diagram of attitude maneuver control loop 输入成型技术是对控制指令进行调制,它在姿态机动中的应用就是对已规划的机动路径(称为原始机动路径)进行再次规划,得到最终机动路径,最终机动路径的末端等于机动目标姿态。其中,原始机动路径根据执行机构的最大输出力矩按刚体卫星规划;最终机动路径通过输入成型器对原始机动路径进行成型调制得到,输入成型器则根据拟抑制的挠性振动模态的频率与阻尼比设计。 输入成型器抑制振动的实质是零极点对消原理,输入成型器提供共轭零点,该零点恰好对消二阶系统(卫星动力学模型)的共轭极点,从而抑制模态的振动,因此不管系统是单模态还是多模态,只要成型器能够提供足够的零点,模态振动就能得到抑制。一个振动模态对应一个二阶系统,多个振动模态对应多个二阶系统,因此多模二阶系统需要多个输入成型器,应用中将各个模态的输入成型器做卷积,组成一个能抑制多个模态的综合成型器。 定义二阶系统G(s)和一个由N个脉冲组成的脉冲序列信号I(t)如下。 (11) (12) 式中:β和ζ分别为系统的振动频率和阻尼比;Ai和ti分别为第i个脉冲的幅值和作用时刻。 (13) 输入成型技术要求当最后一个脉冲ANδ(t-tN)作用完毕时,系统的振动,即式(13)为0,这就要求式(14)成立。 (14) (15) 通常,将式(15)给出的两脉冲输入成型器,称为ZV(ZeroVibration)成型器。 增加对频率的导数约束,即 dV/dβ=0 (16) 联合求解式(14)和式(16),可得新的输入成型器为 (17) 通常,将式(17)给出的三脉冲输入成型器称为ZVD(Zero Vibration and Derivation)成型器。 通过增加振动比关于频率的高阶导数约束,还可得到更多脉冲的成型器,但是随着脉冲个数的增加,系统对原始指令的响应滞后会比较严重,因此不希望脉冲数太多,一般姿态机动最多采用到ZVD即可。 4.1 姿态机动控制器与输入成型器设计 4.2 仿真结果与分析 采用50 N·m·s、20 N·m的五棱锥构型单框架控制力矩陀螺群,卫星从三轴稳态对地定向向目标姿态q=[0.948 3 0.140 3 0.162 8 0.233 5]T(对应“312”转序的姿态为偏航角25°,滚动角20°,俯仰角15°)机动,控制周期为0.2s。经成型器调制后,卫星绕欧拉轴转过的角度、角速度和角加速度指令如图3所示。从图3中可知,相比原始姿态机动路径,调制后的路径存在时间滞后,这是输入成型具有的特性。 图3 成型调制前后的姿态路径对比Fig.3 Comparison of attitude path with and without input shaping 图4~5给出了采用和不采用输入成型情况下的机动后期姿态控制结果。可以明显看出,输入成型调制可实现快速稳定,能有效提高指向精度,同时还可以提高机动控制后期的稳定度。 图6给出了采用和不采用输入成型情况下的太阳翼结构振动情况。可以明显看出,太阳翼结构振动在姿态机动到位时已经得到大幅衰减,表明了输入成型器能够有效降低挠性结构振动。 通过以上仿真结果可以看出,在姿态闭环PD控制的基础上引入轨迹规划和输入成型调制环节,不仅能实现卫星快速机动的设计目的,还有效抑制了卫星上太阳翼的挠性结构振动,提高了姿态机动到位后卫星载体的稳定度,缩短了稳定时间。 图4 机动控制后期绕欧拉轴机动的角度误差Fig.4 Eular-axis angular error in end phase of maneuver 图5 机动控制后期的角速度Fig.5 Angular velocity in end phase of maneuver 图6 太阳翼模态坐标Fig.6 Modal coordinate of solar wing 根据敏捷卫星的应用需求,卫星姿态快速机动和快速稳定技术依然是卫星控制系统的重要任务。基于此背景,本文提出了一种“复合控制+路径规划+输入成型”的卫星姿态敏捷机动控制方法,其具有两个优点:一是能有效降低太阳翼挠性结构振动;二是可以实现卫星姿态机动到位后迅速稳定,实现快速机动目的,从而为有效载荷提供更多的可工作时间和高精高稳的工作环境。仿真结果表明了本文方法的可行性和优势,可应用于高分辨率敏捷卫星和其他有快速姿态控制需求的卫星。 ) [1]WieB,DBailey,CHeiberg.Rapidmultitargetacquisitionandpointingcontrolofagilespacecraft[J].JournalofGuidance,ControlandDynamics,2002,25(1): 96-104 [2]崔颖慧,关新,郑钢铁.遥感卫星指标体系建设及发展趋势[C]//第二届高分辨率对地观测学术年会论文集.北京:高分辨率对地观测系统重大专项管理办公室,2013:326-332 CuiYinghui,GuanXin,ZhengGangtie.Thebuildingofindicatorssystemanddevelopmenttrendforremotesensingsatellite[C]//Proceedingsofthe2ndChinaHighResolutionEarthObservationConference.Beijing:TheMajorSpecialBureauforHighResolutionEarthObservationSystem,2013: 326-332 (inChinese) [3]王大轶.高精度姿态测量与敏捷控制技术[C]//第一届高分辨率对地观测学术年会论文集.北京:高分辨率对地观测系统重大专项管理办公室,2012:94-101 WangDayi.High-precisionattitudemeasurementandagilecontroltechnology[C]//Proceedingsofthe1stChinaHighResolutionEarthObservationConference.Beijing:TheMajorSpecialBureauforHighResolutionEarthObservationSystem,2012: 94-101 (inChinese) [4]关新,陈守磊,崔颖慧.超静敏捷卫星控制设计中的几项挑战与解决思路[C]//第二届高分辨率对地观测学术年会论文集.北京:高分辨率对地观测系统重大专项管理办公室,2013:954-962 GuanXin,ChenShoulei,CuiYinghui.Severalchallengesandsolutionsforthedesignofhyperstaticagilesate-llitecontroller[C]//Proceedingsofthe2ndChinaHighResolutionEarthObservationConference.Beijing:TheMajorSpecialBureauforHighResolutionEarthObservationSystem,2013: 954-962 (inChinese) [5]LeeBH.Thrusters,timeoptimalattitudemaneuverstrategiesfortheagilespacecraftwithreactionwheelsandthrusters[J].JournalofMechanicalScienceandTechnology,2005,19(9): 1695-1705 [6]SteynWH.Near-minimum-timeeigenaxisrotationmaneuversusingreactionwheels[J].JournalofGui-dance,ControlandDynamics,1995,18(5): 1184-1189 [7]ShanJ,HTLiu,DSun.Modifiedinputshapingforarotatingsingle-linkflexiblemanipulator[J].JournalofSoundandVibration,2005,28(12): 187-207 [8]SongG,NBuck,BAgrawal.Spacecraftvibrationreductionusingpulse-widthpulse-frequencymodulatedinputshaper[J].JournalofGuidance,ControlandDynamics,1999,22(3): 433-440 [9]DohertyMJ,TolsonRJ.Inputshapingtoreducesolararraystructuralvibrations,NASA/CR-1998-208698 [R].WashingtonD.C.:NASA,1998 [10] 原劲鹏,刘建功,杨雷.步进电机驱动柔性负载的一种振动抑制控制策略[J].空间控制技术与应用,2008,34(6):34-38 YuanJinpeng,LiuJiangong,YangLei.Avibrationsuppressioncontrolstrategyforstepmotordrivingflexiblepayload[J].AerospaceControlandApplication,2008,34(6): 34-38 (inChinese) [11]王凤鸣,陕晋军,高桦,等.应用分力合成的步进电动机驱动方案研究[J].上海航天,2001(3):9-14 WangFengming,ShanJinjun,GaoHua,etal.Studyondrivingstrategiesofsteppingmotorusingcomponentsynthesismethod[J].AerospaceShanghai,2001(3): 9-14 (inChinese) (编辑:夏光) Attitude Maneuver Control Method for Agile Satellite Based on Input Shaping ZHOU Weimin1,2LIAO Ying1YANG Yajun1ZHU Qinghua3,4 (1 College of Aerospace Science and Engineering,National University of Defense Technology,Changsha 410073,China) (2 Shanghai Academy of Spaceflight Technology,Shanghai 201109,China) (3 Shanghai Key Laboratory of Aerospace Intelligent Control Technology,Shanghai 201109,China) (4 Shanghai Institute of Spaceflight Control Technology,Shanghai 201109,China) An agile satellite puts forward higher requirements for rapidity and stability of satellite attitude maneuver. This paper presents a satellite attitude maneuver control method based on input shaping. The rapidity of attitude maneuver is achieved by using path programming,and PD feedback control and maneuver moment forward control are adopted. Then,the programmed control signals are modulated by input shapers,thereby the stability is improved in end phase of the satellite control process,and the vibration of flexible parts of satellite is restrained during the control process. Simulation results demonstrate that the satellite can realistically achieve fast attitude maneuver and flexible vibration restraint by means of attitude maneuver path programming and input shaping. Meanwhile,the setting time of attitude stabilization is also shorten. It can provide more operable time and higher precision-stabilization condition for the payload. agile satellite; attitude maneuver; input shaping; path programming; flexible structure vibration restraint; composite control 2016-02-01; 2016-06-20 国家重大航天工程 周伟敏,男,研究员,研究方向为高精度航天器姿态确定与姿态控制。Email:kejiwei@126.com。 V448.22 A 10.3969/j.issn.1673-8748.2016.04.005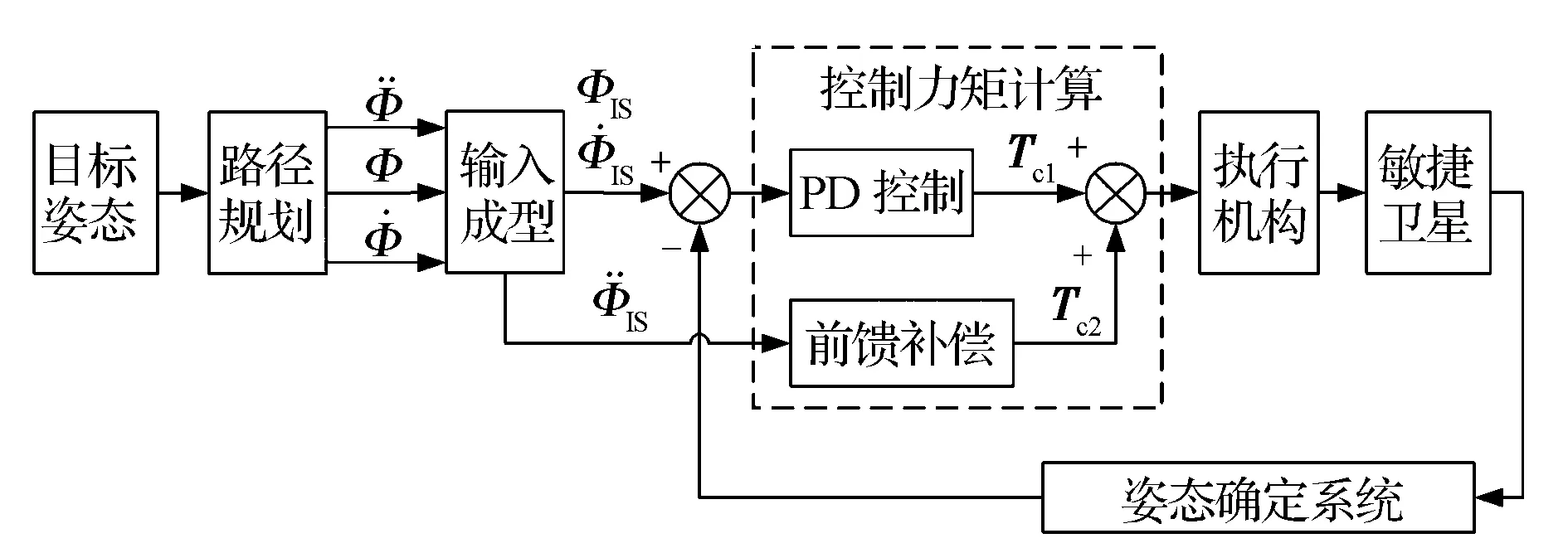
3 应用输入成型的挠性结构振动抑制与快速稳定


4 仿真试验与分析

5 结束语
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:21:52
学生天地(2020年3期)2020-08-25 09:04:16
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
制造技术与机床(2017年3期)2017-06-23 08:11:51
制造技术与机床(2017年3期)2017-06-23 08:11:25
空间控制技术与应用(2015年1期)2015-06-05 12:22:16
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50