
国外探测器接近至着陆小天体的飞行策略研究
2016-03-16 07:09董捷
航天器工程 2016年4期
董捷
(北京空间飞行器总体设计部,北京 100094)
国外探测器接近至着陆小天体的飞行策略研究
董捷
(北京空间飞行器总体设计部,北京 100094)
调研了3项国外典型的小天体着陆探测任务,包括近地小行星交会(探测)任务(NEAR)、罗塞塔号探测任务和隼鸟号探测任务,归纳总结了各任务中自接近至着陆小天体过程的设计特点,提出了小天体接近至着陆飞行策略:首先采用逐渐降低高度的接近轨道,开展引力场、外形参数初步测量;着陆前根据探测目标小天体质量大小设计特定的环绕或停泊轨道,在满足轨道稳定性、能源约束条件下,完成小天体的详细观测并选定着陆区,最终进入着陆初始轨道条件;着陆过程根据探测目标质量与体积、系统质量资源约束采用自由落体或自主轨道控制完成着陆。文章的研究结果可为后续我国小天体着陆探测任务提供借鉴。
小天体;探测器;环绕;停泊;着陆;自主轨道控制
1 引言
当前小天体(小行星、彗星)探测正逐渐成为国际深空探测的热点,根据目前已实施或计划实施的小天体任务设计情况来看,研究太阳系形成与演化、搜集地球安全防御信息、寻找稀有资源是各个任务的重要驱动力。到目前为止国外共发射了20颗与小天体相关的探测器,包括掠飞、绕飞、着陆、取样返回等多种探测方式。由于大部分小天体具有体积小、质量小、形状不规则、运动状态复杂等特点,只依靠地面观测了解的小天体信息非常有限。为了获得尽可能多的第一手探测数据,着陆探测是较为有效的方式。根据对有关国家小天体探测任务的调研来看,国外成功实施小天体着陆的任务仅有三次,其风险最大的环节是探测器近距离接近至着陆小天体的过程,需要针对性地设计飞行策略。
本文首先对国外小天体着陆探测中较为典型的三次任务进行分析,包括NASA的近地小行星交会(探测)任务(NEAR)、ESA的罗塞塔号(Rosetta)和日本的隼鸟号(Hayabusa)任务,梳理了其飞行策略的主要特点。其中NEAR探测器完成了简单的着陆任务,罗塞塔号实现了较为长期的表面驻留,而隼鸟号则采用了“touch and go”的短期接触及采样方式。其接近至着陆策略从NEAR简单的开环控制逐渐发展到了隼鸟号的自主闭环导航制导与控制。由于这三次任务的探测天体物理特征不同,其环绕及着陆策略又存在一定差异。最后按接近、环绕(或停泊)及着陆3个阶段提出了小天体着陆探测飞行策略中须重点关注的主要问题及设计方法。
2 国外典型任务
2.1 探测目标
NASA的NEAR、ESA的罗塞塔和日本的隼鸟号探测目标分别为爱神(Eros)小行星、邱留莫夫-格拉希缅科彗星和糸川(Itokawa)小行星。其中NEAR任务还对主带小行星Mathilde进行了飞掠探测。3个着陆目标天体的主要参数见表1。

表1 3个小天体主要参数Table 1 Key paremeters of the three small celestial bodies
3个小天体的质量、外形尺寸依次减小。特别是由于糸川小行星引力小,逃逸速度过低,轨道预报误差和变轨误差本身就将超出逃逸速度,探测器较难保持在环绕轨道飞行。
2.2 接近至着陆策略
2.2.1 NEAR
美国NEAR探测器完成了对爱神(Eros)小行星的接近、环绕及着陆任务,首次尝试了环绕小行星过程中开展成像等一系列探测活动,除初步获取了小行星的重要物理参数外,还为后续的着陆试验提供了参考。
(1)接近段:初始设计了5个阶段完成对Eros的环绕(见图1),以逐渐降低相对高度,完成必要参数测量。由于第一次制动星上未正常执行,地面修改了后续任务序列,捕获前获取了部分低分辨率图像(400 m/像素),开展了质量、体积等主要参数估计[1]。

图1 接近机动序列Fig.1 Timeline for NEAR’s approaching maneuver sequence
(2)环绕段:1999年3月1日,NEAR通过一次深空机动(速度增量932 m/s),实现跟随Eros小行星运动。2000年,NEAR探测器经历了一系列修正后成功实现对Eros环绕,进入324 km/367 km绕飞轨道,后续逐渐降低轨道高度开展科学探测(见图2)。为了降低Eros摄动和太阳光压对轨道的影响,探测器处于赤道附近圆轨道,以轨道半径35 km进行近距离观测。在该轨道上工作约90 d。NEAR在达到较低高度时采用与小行星自转方向相反的逆行轨道,使轨道更为稳定。
在环绕期间,由于对日定向、对地定向、对小行星表面探测三方面约束,需要定期进行轨道维持,控制轨道法线指向。在距离Eros中心35 km轨道上绕飞时,利用光学成像敏感器和激光高度角获取了Eros的光学和三维影像数据,精确确定了Eros尺寸、形状、自转轴指向和转速等信息,重力场信息利用轨道测量数据反演得到。
(3)着陆段:在完成预定科学目标后,通过开环减速制动进行了表面着陆试验。文献[2-3]对该过程进行了介绍。从距小行星5 km高度开始,在4.5 h下降过程中按设定时间进行了4次制动(见图3);其中第2次机动延长了2 km以下飞行时间(增加20 min),最终探测器以径向1.3 m/s,侧向0.3 m/s的速度着陆,在表面工作14 d。着陆点的选择是使下降轨迹能获得的低空表面图像数最多,能在下降过程中保持连续指向地球,同时星上相机能始终对准Eros表面。整个着陆过程在制导、导航与控制(GNC)分系统的控制下使姿态始终保持惯性定向直至着陆。

图2 NEAR绕飞Eros运行轨道(从太阳方向看Eros)Fig.2 Orbit around Eros of NEAR (from the Sun direction)
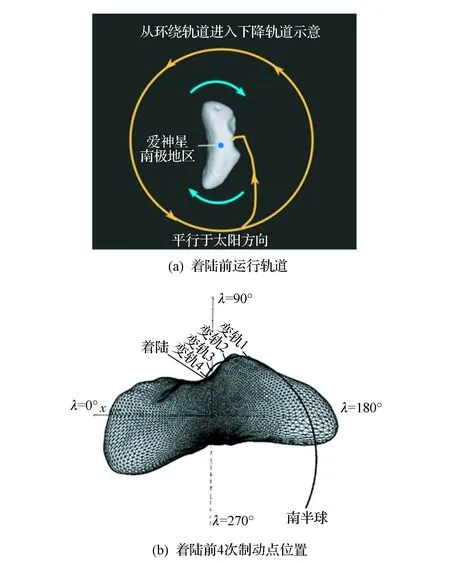
图3 NEAR着陆至Eros示意图Fig.3 Schematic diagram of NEAR landing on Eros
2.2.2 罗塞塔号探测器
罗塞塔号探测器的探测目标是邱留莫夫-格拉希缅科彗星(67P/Churyumov-Gerasimenko)。它由轨道器和着陆器(“菲莱”)两部分组成。罗塞塔号轨道器采用了传统的双组元推进系统,着陆器仅配置了简单的控制机构(动量轮和单方向控制冷气推进系统)不具有三轴姿态控制和导航能力。
(1)接近段:此阶段罗塞塔号探测器缓慢接近彗星,执行了一系列轨道机动使探测器进入着陆器分离前轨道。由于在环绕前没有精确的彗星引力场参数,接近时采用了相对彗星的金字塔型双曲线轨道,逐渐降低相对彗星的高度,从而在不同位置观测彗星,并能减少接近过程中彗星表面物质挥发对探测器的影响(见图4[4])。

图4 金字塔型轨道Fig.4 Pyramid orbits
(2)环绕段:环绕时主要飞行事件见表2和图5[5]。
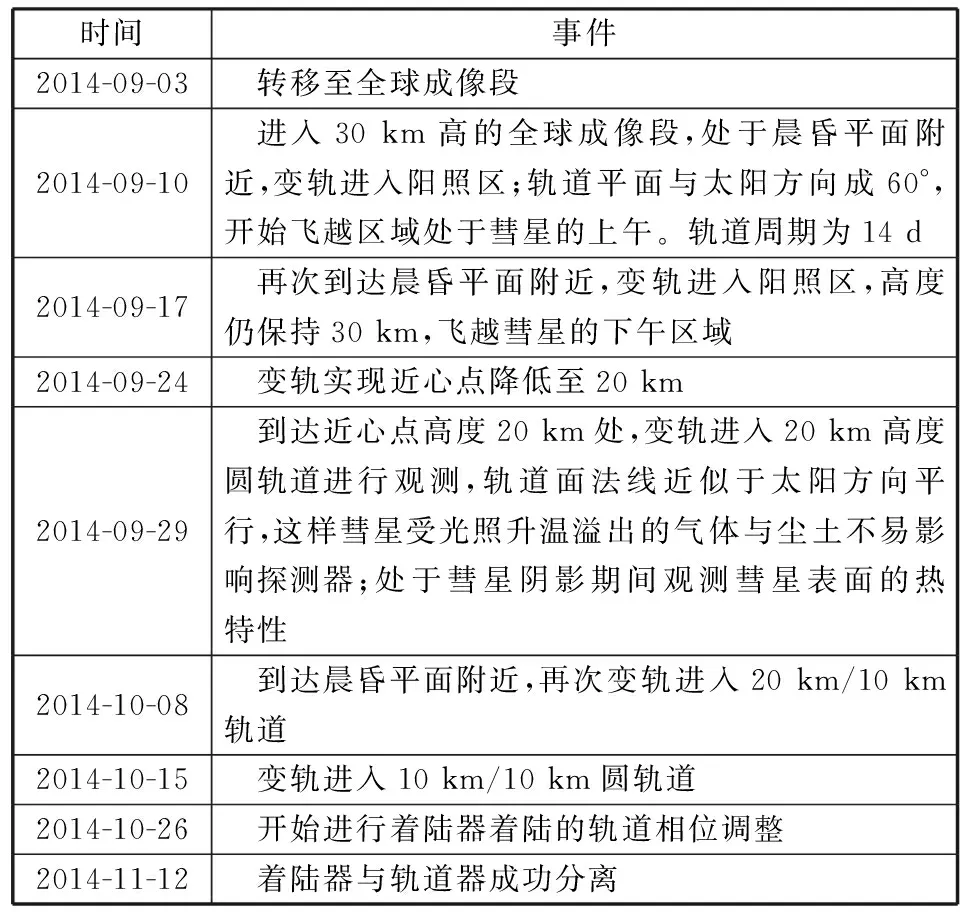
表2 罗塞塔号探测器环绕彗星过程中的主要事件Table 2 Key events of the Rosetta orbiting comet
主要任务是开展彗星全面探测,确定菲莱着陆器着陆点。需要尽可能使探测器处于光照区,并避免彗星表面挥发物质对探测器的影响。为了着陆后处于光照区,分离前首先通过轨道器进入面向太阳一侧的双曲线轨道[5],依靠释放时相对轨道器的分离速度减速进入与小天体相交的轨道(见图6)。
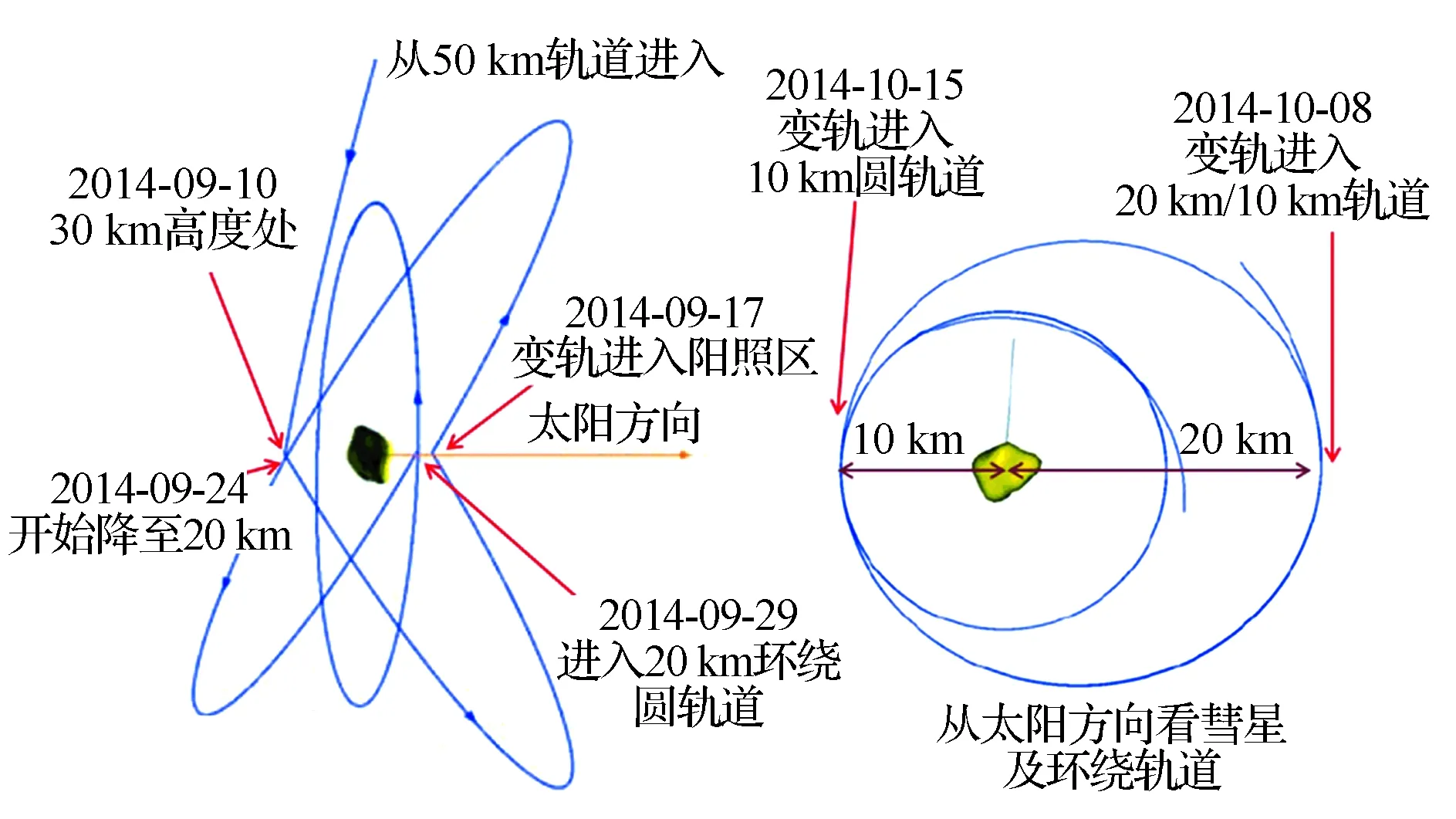
图5 罗塞塔号探测器着陆前环绕轨道Fig.5 Orbiting trajectory before Rosetta landing
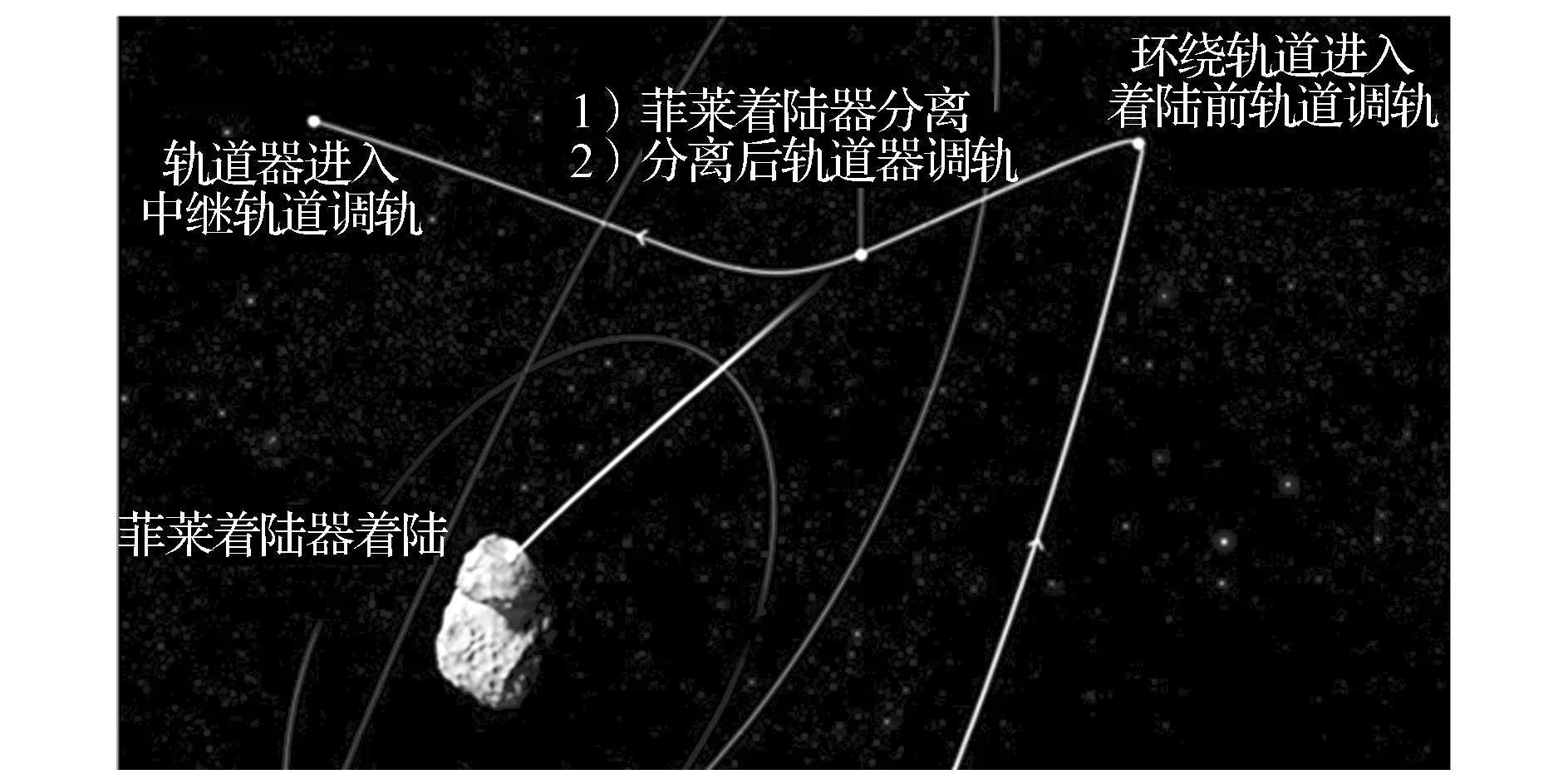
图6 着陆阶段轨道Fig.6 Landing trajectory
(3)着陆段:选定着陆点后,着陆器在彗星表面采用自由落体方式着陆,不进行导航,正常情况下也不进行轨道控制,地面不进行干预。着陆器可按设定速度范围从轨道器推离,不同的分离速度将产生不同下降轨道,分离时利用分离机构调节分离速度[6]。分离前首先随轨道器进入双曲线逃逸轨道,依靠释放时相对轨道器的分离速度减速进入与小天体相交轨道。着陆前根据彗星引力大小以及着陆点位置范围确定着陆初始速度、初始高度与飞行时间(见图7)。
分离前轨道器建立本体纵轴指向(触地时刻着陆点当地法线方向),着陆过程相对惯性空间定向,用动量轮实现着陆器绕本体纵轴的慢旋控制保持稳定。着陆器还配置一组沿纵轴单向控制推力器,可根据需求在着陆过程中施加速度增量,并在接触彗星表面时将着陆器压紧在彗星表面,防止跳起。
着陆器设计着陆精度约几百米,着陆速度1 m/s。由于用于反推的推进系统和锚锭装置失效,偏离预定地点1 km以上,光照不足,影响了后续任务。

图7 菲莱号着陆器着陆至彗星示意图Fig.7 Schematic diagram of Philae landing on the comet
2.2.3 隼鸟号
隼鸟号任务是开展糸川小行星采样返回。探测器采用了电推进和双组元化学推进两种体制,电推进用于向小行星转移和从小行星返回地球的转移过程,探测器接近小行星以后的飞行仍采用双组元化学推进系统。文献[7]对隼鸟号的GNC分系统配置、停泊及着陆策略进行了介绍(见图8)。
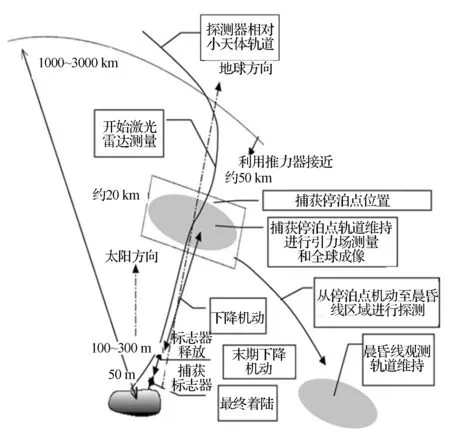
图8 隼鸟号接近至着陆糸川小行星示意图Fig.8 Schematic diagram of Hayabusa approaching and landing on Itokawa
隼鸟号探测器最大的特点是配置的着陆敏感器,包括窄角相机(ONC-T),用于科学成像探测及辅助制定着陆策略的小行星绘图;用于星上导航的宽视场相机(ONC-W);高度测量包括两种量程的激光测距敏感器(LIDAR和LRF)。扇形波束敏感器(FBS)可探测出某些撞击太阳电池板的潜在障碍。
(1)接近段:基于地面导航结果(图像+无线电测量)设计了电推进系统工作策略,逐渐降低相对小天体的高度,转移至相对距离50 km高度附近。
(2)进入停泊点:当逼近小行星50 km时,使用LIDAR敏感器对小行星表面进行测距。通过自主导航,将隼鸟号制导到停泊点,此处距小行星表面约20 km,靠近小行星-地球连线上。这样有利于同时实现对地通信和对小行星测距。
隼鸟号在停泊点停留约6个月,进行小行星大小、形状、自转轴指向、自转周期、表面成分与结构、地形条件(坡度、石块与坑)的探测,建立小行星三维模型,确定着陆区。
(3)着陆段:在约500 m高度处,地面根据隼鸟号探测器传送至地面的图像,判断是否满足后续着陆的条件。从100 m高度开始,根据测量范围和精度要求,LRF接替LIDAR开始继续测距。通过LRF-S1的4束测距信号,可获取相对小行星表面的高度和姿态。
为了降低设计复杂度,没有采用图像跟踪技术,而是在约40 m的高度释放了人造目标标志器(TM),通过ONC-W1光学相机进行跟踪。探测器在捕获TM后,启动相对导航获取相对标志器的位置。随后逐渐将探测器引导至着陆点附近悬停,直至相对速度和姿态满足要求。为避免下降时的意外碰撞,使用了4组扇形波束敏感器,若敏感器检测到障碍,将终止接触采样序列并紧急上升。
最后,控制探测器使其-Z轴平行当地垂线,速度控制在水平方向±8 cm/s,垂直方向10 cm/s。快速采样完成后通过推力器快速起飞。探测器具备多次着陆采样的能力以应对故障[8]。
2.2.4 三次任务飞行策略比较
上述三次任务从小天体接近至着陆的飞行策略对比见表3。

表3 三次任务飞行策略Table 3 Flight strategies of three missions
3 小天体接近至着陆飞行策略比较
通过对前面3个探测器的分析,小天体接近至着陆过程主要划分为3个阶段,包括接近段、环绕段(或停泊段)与着陆段。
3.1 接近段
通过渐进机动,设计相对高度逐渐降低的接近轨道,开展一定时间对引力场、外形等参数的测量,便于设计后续的环绕或停泊轨道。逐渐接近过程需要采用图像导航与定轨相结合的方式。前面介绍的三次任务由于探测目标不同,结束接近段的时机有所区别。
由于Eros质量较大,易于形成环绕轨道,NEAR首先进入高度较高的近圆轨道(324 km/367 km轨道),再逐渐降轨接近小天体。邱留莫夫-格拉希缅科彗星由于质量相对较小,罗塞塔号是通过非闭合的三角形接近轨道过渡进入低高度环绕轨道(距小天体表面约30 km)。糸川小行星质量过小,隼鸟号则直接转移到达停泊点高度(距小天体表面约20 km)附近。
可见,需要根据探测目标附近的引力条件,合理选择结束接近段的时机。
3.2 环绕段(或停泊段)
即探测器距离小天体20 km~100 km与小天体保持相对静止或形成环绕的相对闭合轨道,此阶段的轨道设计要兼顾能源、测控及对小天体探测等设计约束。实现在正常巡航姿态飞行下,定向天线对地、太阳翼对日的有利指向。
当小天体质量较大时,通常采用环绕轨道,必须规划一个非常缓慢接近小天体或距离小天体较近的轨道段,使探测器上的相机可以得到较为清晰的小天体图像,成像活动一般需要几周或几个月,通过大量图像数据确定小天体的尺寸、形状和较为精确的惯性指向及自旋角速度等信息。此外,小天体引力位特征与大行星的非球形引力位有明显差别,在这样特殊的引力场中低轨探测器的运动存在新的问题,地面需要利用光学图像和轨道数据建立一定精度的小天体动力学模型[9]。为了增加稳定性,降低田谐项C22的影响,可以采用靠近小天体赤道平面的逆行轨道[10-11]。
当小天体质量相对较小时,则需要采用停泊的方式驻留在小天体上方相对固定的区域。其具体又包括两种方式:一种是目标小天体质量足够小,小天体和探测器都可以视为以太阳为中心天体的两颗行星;另一种是目标小天体质量不能忽略,探测器的停泊位置就是限制性三体问题中的平动点L1或L2附近的周期或拟周期轨道上,由于小天体质量相对于太阳确实很小,平动点L1和L2距离小天体很近[12],便于对小天体进行详细观测。从对日、对地长期可见角度考虑,可以选择L1点。
3.3 着陆段
3.3.1 自由落体方式
着陆段系统配置和飞行过程如下。
1)系统配置
仅包括起旋装置(如动量轮或推力器)、着陆器与轨道器的分离机构、着陆触地时的固定与抓捕装置。为了减小采用推力器点火带来的轨道摄动,通常采用动量轮起旋并稳定姿态。
2)飞行过程
着陆器在小天体表面着陆采用自由落体方式,不进行导航,正常情况下也不依靠推进系统进行轨道控制,仅依靠释放时相对轨道器的分离速度进入与小天体相交的轨道,实现最终着陆。特殊情况,由地面控制施加固定方向的冲量。
着陆初始高度、初始速度等参数条件需要根据目标天体质量、地形条件、飞行时间长度、触地速度大小、碰撞风险等因素进行综合设计。文献[13]在假设着陆器只沿径向做自由落体运动条件下,对着陆不同质量特性(见表4)彗星时的着陆时间、天体表面接触时速度与释放高度进行了分析(见图9)。

表4 彗星典型参数Table 4 Typical paremeters of the comets

图9 下降时间、接触表面速度与释放高度的关系Fig.9 Relationship between the flight time,the touch velocity,and the release height
在相同释放高度下,小天体质量越小,下降时间越长,表面接触速度越小;小天体质量越大,下降时间越短,表面接触速度越大。而释放高度又受限于地面定轨精度和轨控精度。以10 km释放高度为例,着陆中型彗星对应的下降时间约7~8 h,着陆速度约1.5 m/s。因此采用自由落体方式更适合质量规模适中的小天体,其下降时间和表面接触速度都相对合理。
3.3.2 开环序列控制
开环序列控制的特点是由地面事先规划探测器下降至小天体表面的多次变轨策略。着陆方式具备一定的姿态自主控制能力,但不进行着陆过程的自主导航,利用地面获取的探测图像信息和无线电定轨数据,由地面制定变轨机动序列,依据变轨策略自主在变轨点执行变轨动作,实现开环轨道控制。其它时间阶段仅保持天线对地指向惯性姿态飞行,尽可能兼顾对日定向。
3.3.3 闭环控制
此方式利用主动制导、导航与控制系统在指定着陆区着陆,其着陆时的控制精度高,可以适应极弱引力的小天体探测。
1)系统配置
系统配置通常包括:敏感器采用惯导设备(IMU)、光学相机或激光成像仪、测距雷达、测速雷达;执行机构通常采用三轴控制推力器。
2)飞行过程
从距离小行星20 km开始,星上GNC分系统要控制探测器安全、精确地降落到小行星表面上,在较近距离要实现精确的6自由度控制,以满足降落瞬间的速度和姿态要求。导航方式可以采用惯性测量单元(IMU)+光学相机+测距测速雷达的组合导航方式,在合适时机引入宽视场导航相机,获取小行星表面的法线方向信息,同时利用测距测速雷达获得相对小行星的距离和速度信息,对惯导信息进行修正,完成高精度的自主相对导航任务。
最终着陆段从探测器距离小天体表面几千米(如1~2 km)开始,到软着陆至小天体表面结束,该过程的主要任务是控制探测器下降并在小天体表面安全着陆。在接近小天体表面几百米(如100~300 m)时,需要实现与小天体自转的同步,以保证最终的着陆姿态及速度等接触条件。为便于获取相对小天体表面的水平速度,可以释放主动目标标志器,便于引导控制,降低图像识别算法的复杂度。必要时还可采用类似我国嫦娥三号的避障策略,星上自主开展地形坡度和石块分析来优选着陆区[14]。探测器接近至着陆全过程如图10所示。

图10 探测器接近/下降/着陆过程Fig.10 Approaching/descending/landing process of the probe
3.3.4 着陆控制方式综合比较
综合分析,上述几种着陆控制方式的主要特点见表5。
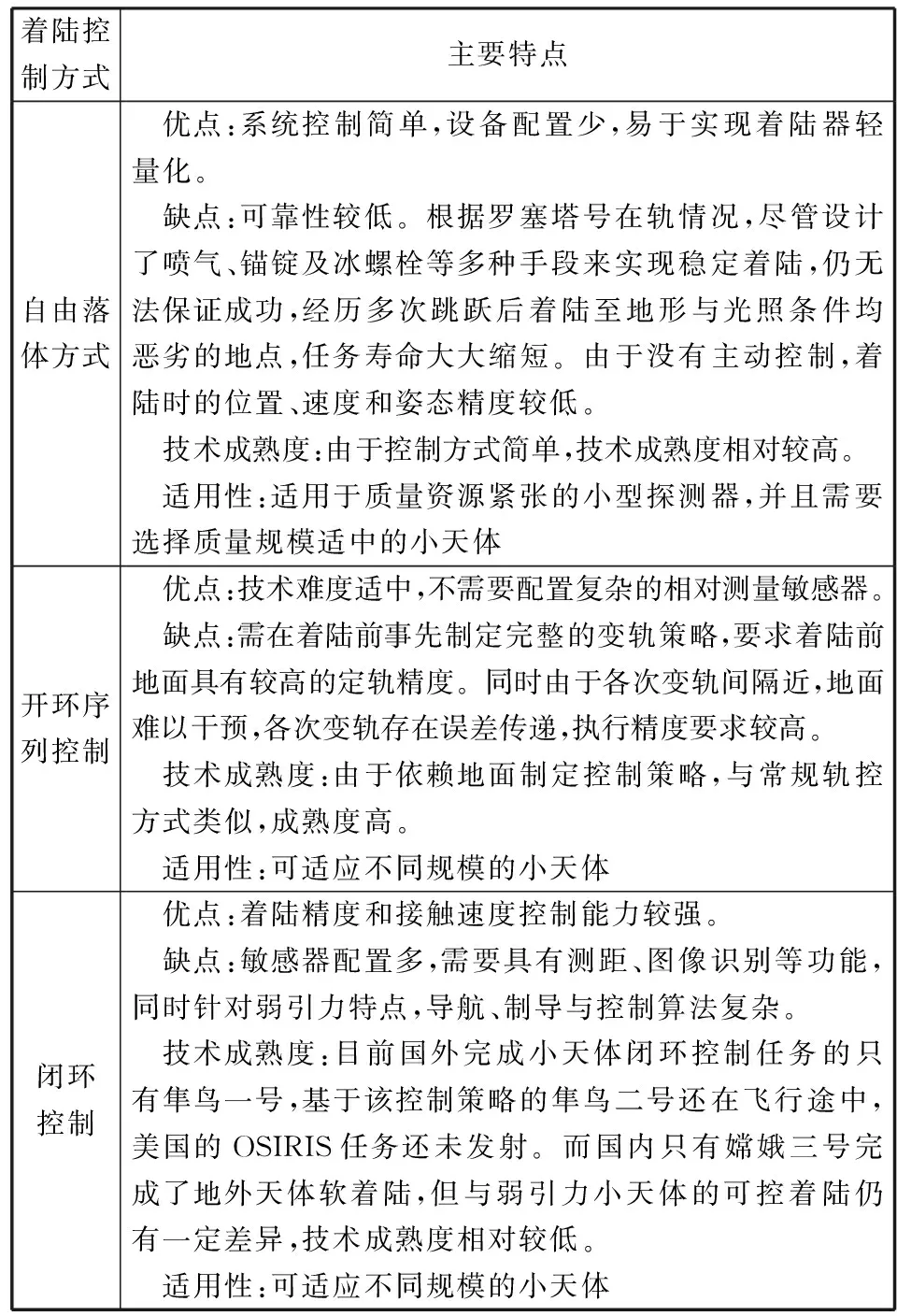
表5 着陆控制方式的比较Table 5 Comparision of the landing control modes
对于软着陆等关键任务,在系统资源配置允许时应尽可能采用自主轨道控制方式(特别是闭环控制方式)实现接触小天体时的精确控制,确保着陆安全,而且更能适应不同质量大小的目标天体及地形条件。从目前国外正在开展及规划的小天体探测任务来看,着陆控制方式正逐渐向全过程自主闭环控制发展(如日本隼鸟二号、美国对BENNU小行星探测的OSIRIS任务[15])。
4 结束语
小天体存在弱引力、形状不规则、表面形貌先验信息少等特点,其探测方式有别于传统的大天体,可以考虑飞越、环绕、停泊、着陆探测、采样返回等多种的探测方式,其中接近至着陆过程技术难度最大,需要针对性地规划飞行策略。本文通过对3项国外典型的小天体着陆探测任务,归纳了小天体接近至着陆策略的特点:通过渐进机动逐渐降低相对高度,开展质量、外形、自转方向等参数的初步测量;再根据小天体质量大小,在着陆前进入小天体环绕或停泊轨道,采用保证对日、对地、对小天体指向需求的特定轨道姿态,通过光学或激光探测、无线电定轨等方式进一步精细测量小天体参数并确定着陆区,根据天体特点和着陆器质量资源,最终采用自由落体或自主轨道控制完成着陆,这也决定了系统设计的复杂性和着陆控制能力。以上设计思想可以为我国后续小天体着陆任务设计提供参考和借鉴。
References)
[1] J V McAdams. Maneuver history for the NEAR mission: launch through Eros orbit insertion[C]//Astrodynamics Specialist Conference.Washington D.C.:AIAA,2000
[2]Andrew J Ball,James R C Garry,Ralph D Lorenz. Planetary landers and entry probes 1[M]. Cambridge:Cambridge University Press,2007
[3]Robert W Farquhar. Fifty years on the space frontier:Halo orbits,comets,asteroids,and more[M].Colorado:Outskirts Press,Inc,2011
[4]Andrea Accomazzo. Rosetta operations at the comet[C]//65thInternational Astronautical Congrass.Toronto,Cananda:International Astronautical Federation,2014
[5]Andrea Accomazzo,Paolo Ferri,Sylvain Lodiot,et al. Preparing Rosetta re-activation[C]//64thInternational Astronautical Congrass.Toronto,Cananda:International Astronautical Federation,2013
[6]Stephan Ulamec,Jens Biele.Surface elements and landing strategies for small bodies missions-Philae and beyond[J]. Advances in Space Research,2009,44 (7): 847-858
[7]Takashi Kubota,Tatsuaki Hashimoto,Shujiro Sawai,et al. An autonomous navigation and guidance system for MUSES-C asteroid landing[J].Acta Astronautica,2003:125-131
[8]Jun’ichiro Kawaguchi,Akira Fujiwara,Tono Uesugi. Hayabusa—Its technology and science accomplishment summary and Hayabusa-2[J]. Acta Astronautica,2008:639-647
[9]刘林,侯锡云.深空探测器轨道力学[M].北京:电子工业出版社,2012
Liu Lin,Hou Xiyun.Deep space spacecraft orbital dynamics[M].Beijing: Publishing House of Electronics Industry,2012 (in Chinese)
[10] Scheeres D J,Williams B G,Miller J K. Evaluation ofthe dynamic environment of an asteroid: Application to 433 Eros[J].Journal of Guidance ,Control,and Dynamics,2000,23(3):466-475
[11]胡维多,Scheeres,向开恒.飞行器近小行星轨道动力学的特点及研究意义[J].天文学进展,2009,27(2):6
Hu Weiduo,Scheeres,Xiang Kaiheng. The characteristics of near asteroid orbital dynamics and its implication to mission analysis[J]. Progress in Astronomy,2009,27(2): 6 (in Chinese)
[12]刘林,汤靖师.大行星、月球和小天体环绕型探测器的轨道问题[J].航天器工程,2012,21(4):5-15
Liu Lin,Tang Jingshi. Orbits of orbiting probes around planets,moon and small celestial bodies[J]. Spacecraft Engineering,2012,21(4):5-15 (in Chinese)
[13]Peter Fortescue,Graham Swinerd,John Stark.航天器系统工程(上册)[M].李靖,范文杰,刘佳,等,译.北京:科学出版社,2014
Peter Fortescue,Graham Swinerd,John Stark. Spacecraft systems engineering[M].Li Jing,Fan Wenjie,Liu Jia,et al,translated.Beijing:Science Press,2014 (in Chinese)
[14]王大轶,李骥,黄翔宇,等.月球软着陆过程高精度自主导航避障方法[J].深空探测学报,2014,1(1):44-51
Wang Dayi,Li Ji,Huang Xiangyu,et al.A pinpoint autonomous navigation and hazard avoidance method for luna soft landing[J].Journal of Deep Space Exploration,2014,1(1):44-51 (in Chinese)
[15]Alexander May,Brian Sutter,Timothy Linn,et al.OSIRIS-REX touch-and-go(TAG) mission design for asteroid sample collection[C]//65thInternational Astronautical Congrass. Toronto,Cananda: International Astronautical Federation,2014
(编辑:李多)
Investigation of Foreign Probes Flight Strategy from Approaching to Landing on Small Celestial Bodies
DONG Jie
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
This paper investigates three typical missions of landing on small celestial bodies,i.e. NEAR,Rosetta and Hayabusa. It summarizes the design methods of each mission respectively and proposes the flight strategy from approaching to landing on the small celestial bodies. At first an approaching orbit is adopted which descends gradually to measure the gravity and appearance of the small celestial body. Then an orbiting or parking trajectory is designed according to the mass of the small celestial body,restrictions on orbit stability and power consumption. During that time,the observation is performed in detail,the feasible landing site is selected and the conditions for landing trajectory injection are determined. Finally,free fall or autonomous orbit control is selected by evaluating the mass and volume of the target and limited weight of the probe during the landing process.The research achievements can be used in the small celestial bodies exploration of China.
small celestial body; probe; orbiting; parking; landing; autonomous orbit control
2016-01-04;
2016-04-12
董捷,男,高级工程师,从事深空探测器总体设计工作。Email:donghn13@163.com。
V529
A
10.3969/j.issn.1673-8748.2016.04.014
猜你喜欢
今日农业(2022年2期)2022-11-16
西湖(2022年10期)2022-10-19
小哥白尼(趣味科学)(2022年5期)2022-08-15
小聪仔(科普版)(2020年12期)2021-01-18
航天器工程(2019年4期)2019-11-11
小学科学(2019年7期)2019-08-27
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
太空探索(2016年1期)2016-07-12
中学科技(2015年7期)2015-07-03
