
基于陀螺稳定座架的移动成图系统活动杆臂补偿技术
2016-03-16 05:43周东灵扈光锋曲雪云
导航定位与授时 2016年3期
周东灵,林 翰,扈光锋,曲雪云
(北京自动化控制设备研究所,北京 100074)
基于陀螺稳定座架的移动成图系统活动杆臂补偿技术
周东灵,林 翰,扈光锋,曲雪云
(北京自动化控制设备研究所,北京 100074)
陀螺稳定座架和位置姿态系统(Position and Orientation System,POS)一起构成了移动成图系统(Mobile Mapping System,MMS)的稳定控制部分,POS的位置和姿态角必须达到很高的精度才能满足成图需求。提出了基于陀螺稳定座架的活动杆臂补偿技术,利用陀螺稳定座架测量的姿态角对测绘作业过程中卫星天线到POS的活动杆臂进行解算,对POS输出的位置和速度进行变杆臂补偿,获得更加精确的位置和姿态角信息。机载试验结果表明,该算法可以获得高精度的位置信息,且对姿态角精度有一定提高,是一种有效的系统活动杆臂补偿技术。
陀螺稳定座架;活动杆臂;POS;移动成图系统
0 引言
近年来,移动成图系统快速发展,在军事侦察、国家基础测绘、国土资源管理、农林资源与生态环境调查、城市规划以及自然灾害预警检测等诸多方面发挥着越来越重要的作用[1]。陀螺稳定座架以位置姿态系统(Position and Orientation System,POS)输出的姿态信息为输入信号,实现对固定于座架内框架的测绘载荷的稳定控制,座架和POS共同构成了移动成图系统(Mobile Mapping System,MMS)的控制部分[2]。通过对陀螺稳定座架和POS的原始输出信息进行事后处理,可为后期的成图过程提供高精度的位置和姿态角基准,实现成像的运动补偿和图形拼接,获得满足清晰度和精度要求的图像[3]。
本文设计了基于陀螺稳定座架的活动杆臂补偿算法,采用陀螺稳定座架测量的姿态角对测绘作业过程中卫星天线到POS的活动杆臂进行解算,对POS输出的位置和速度进行变杆臂补偿,以获得更加精确的位置和姿态角信息,用于测绘成图。机载试验结果表明,利用本算法对座架和POS数据进行事后处理,可以获得较高精度的位置和姿态信息,是一种有效的补偿活动杆臂的技术。
1 MMS组成
根据测绘作业任务特点,典型的航空摄影测量MMS主要由相机、陀螺稳定座架和POS三部分组成[4]。
陀螺稳定座架基于以陀螺为主的惯性信息,采用自动控制技术,通过伺服执行机构,可实现内环、中环和外环三个方向敏感轴指向的稳定性及三个方向的姿态角变化量测量,实现相机对载机的低频大幅扰动的隔离,使得相机在复杂的飞行环境中保持相对载机的稳定性,提高航空摄影测量的质量和效率。POS一般由惯性测量单元(Inertial Measurement Unit,IMU)、卫星接收机和计算机系统(POS Computer System,PCS)组成[2],PCS可实现任务过程中对陀螺稳定座架和IMU实时测量数据的同步存储。
相机和IMU固定安装在陀螺稳定座架的内环平台上,保证IMU顶面中心与座架内环平台顶面中心之间的杆臂是常数,不受运动状态影响。卫星接收机的天线固定安装在载机的顶部,天线相位中心与座架内环平台顶面中心之间的杆臂是常数。忽略载机顶部的挠曲变形,在任务过程中,根据任务规划轨迹需求,载机会出现拐弯机动,同时受空气对流影响,载机的俯仰和滚动角不断变化,陀螺稳定座架根据载机运动状态对相机和IMU平台进行调控,导致IMU顶面中心与天线相位中心的杆臂是实时变化的[5],本文给出了该活动杆臂的解算方法,并实现了活动杆臂引起的位置和姿态角补偿。
2 基于陀螺稳定座架的活动杆臂补偿技术
2.1 坐标系及转换关系定义
导航坐标系(oxnynzn):记作n系,是POS在求解导航参数时所采用的坐标系,本文选取地理坐标系作为导航坐标系[6]。
IMU坐标系(oxbybzb):记作b系,原点在IMU的顶面中心,xb轴沿IMU的纵轴指向前方,zb轴沿IMU的横轴指向右侧,yb轴与xb轴、zb轴组成右手坐标系(前上右)。
座架坐标系(oxb1yb1zb1):记作b1系,原点在座架内环平台顶面的中心,xb1轴沿座架的纵轴指向前方,zb1轴沿座架的横轴指向右侧,yb1轴与xb1轴、zb1轴组成右手坐标系(前上右)。


其中,定义ψ为IMU的航向角,θ为IMU的俯仰角,γ为IMU的滚动角,ψ、θ和γ可在事后处理IMU数据的过程中获得。



其中,定义ψ1为座架相对于IMU的航向角增量,θ1为座架的俯仰角增量,γ1为座架的滚动角增量,ψ1、θ1和γ1可由陀螺稳定座架测量解算获得。
2.2 基于陀螺稳定座架的活动杆臂解算


图1 活动杆臂示意图Fig.1 The scheme of varying arm
根据方向余弦矩阵和杆臂的定义,给出活动杆臂lb的计算公式如下:
(1)
(2)
其中,ψ1、θ1、γ1可由陀螺稳定座架测量获得。
此外,在某些对位置、姿态精度要求不高,没有使用陀螺稳定座架或者陀螺稳定座架没有投入工作的测绘作业过程中,将测得IMU顶面中心与天线相位中心之间的初始杆臂,作为lb直接补偿应用。
2.3 位置和速度的杆臂补偿算法
给出导航坐标系n系下,杆臂的计算公式为
(3)


(4)
给出导航坐标系n系下,由杆臂引起的速度误差计算公式为
(5)


(6)
3 机载试验分析
3.1 试验过程
采用自主研发的POS2010系统、PN-14陀螺稳定座架与航空四拼相机联合组成移动成图系统,在中国河南省某市完成多个架次的测绘作业。
其中,POS2010系统的惯性组件由激光陀螺(零偏稳定性为0.02(°)/h)和石英挠性加速度计(零偏稳定性为40μg)组成;PN-14陀螺稳定座架的最大负重达100kg,水平姿态角测量范围为±5°,精度为0.1°,航向角测量范围为±30°,精度为0.3°。整个试验过程中,保证POS2010系即IMU坐标系b系和陀螺稳定座架坐标系b1系同向安装。


图2 移动测量系统安装图Fig.2 The mounting of MMS

图3 检校区飞行轨迹曲线Fig.3 The flight tragectory of testing
机载试验结束,采用两种算法对陀螺稳定座架和POS的数据进行事后处理。其一,利用试验过程中陀螺稳定座架输出的姿态角,根据本文给出的方法,获得POS2010系统顶面中心到卫星天线相位中心的活动杆臂对位置和速度进行补偿;其二,采用POS2010系统顶面中心到卫星天线相位中心的初始杆臂对位置和速度进行补偿。
3.2 试验分析
分别将两种算法获取的POS姿态角和位置信息与基准信息进行对比,以空中三角测量获取的姿态角作为基准姿态角,精度达角秒级,以卫星事后差分处理获取的位置信息作为基准位置,精度达厘米级。
获得统计误差,如表1和表2所示;同时给出误差曲线,如图4~图9所示,其中,下标1表示采用方法一补偿活动杆臂,下标2表示采用方法二补偿活动杆臂。

表1 位置误差

表2 姿态角误差
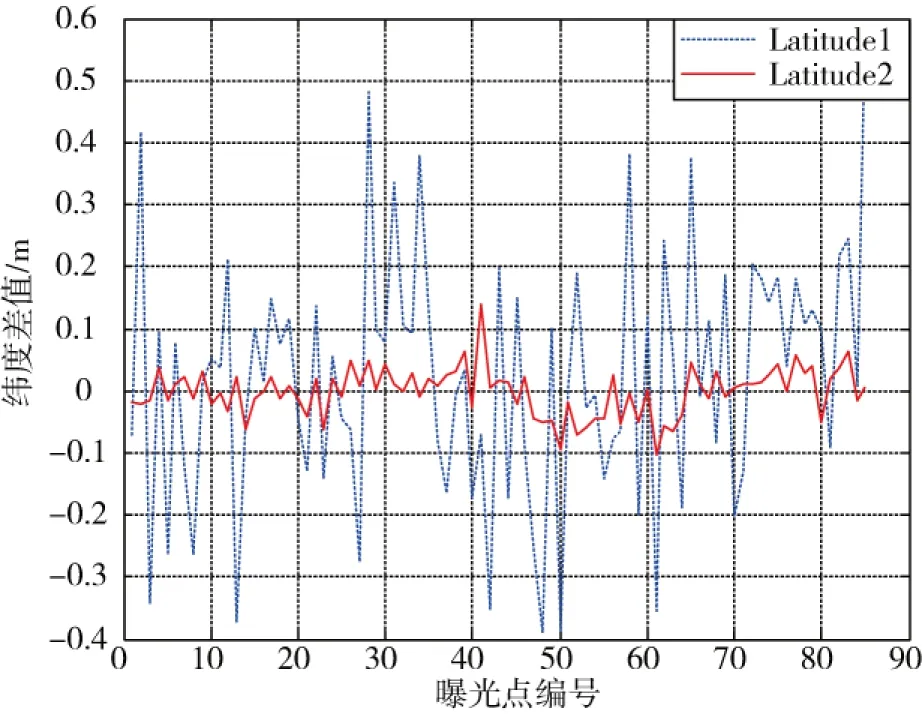
图4 纬度误差Fig.4 Latitude error

图5 经度误差Fig.5 Longitude error
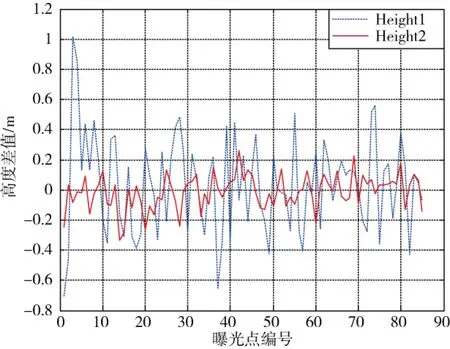
图6 高度误差Fig.6 Altitude error

图7 航向角误差Fig.7 Head error

图8 俯仰角误差Fig.8 Pitch error

图9 滚动角误差Fig.9 Roll error
4 结论
为满足移动成图系统对POS的高精度位置和姿态角需求,提出了一种基于陀螺稳定座架的活动杆臂补偿技术。机载试验结果表明:在姿态角精度方面,对精度的提升有限,与补偿常值杆臂的算法精度相当;在位置精度方面,本技术明显优于只进行常值杆臂补偿的算法。当陀螺稳定座架对姿态角的精度提高时,本技术对精度的提升空间更大,是一种有效的非固连系统活动杆臂补偿技术。
[1] 张智勇.全景移动测量系统及其应用前景展望[J].测绘通报,2014(3):79-81.
[2] 李军杰,关艳玲,左建章,刘宗杰.一种高精度轻小型航空遥感系统的集成与应用[J].测绘科学,2012(9):176-178.
[3] GONG Xiao-lin,FANG Jian-cheng.Application of SVD-based R-T-S Optimal Smoothing Algorithm to POS for Airborne SAR Motion Compensation[J].Acta Aeronautica et Astronautica Sinica, 2009,30(2):311-318.
[4] Duong Thanh Trung, Huang Yun-Wen, Chiang Kai-Wei. Improving the Accuracy of Mems IMU/GPS POS Systems for Land-based Mobile Mapping System by Using Tightly Coupled Integration and Auxiliary Odometer[J]. EIP20123615401976, 2010,November 1- 5.
[5] 关艳玲,刘先林,段福州,左建章.高精度轻小型航空遥感系统集成技术与方法[J].测绘科学,2011(1):84-86.
[6] Massachusetts Inst. of Tech., Lexington.INS/GPS Integration Architectures[J]. ADA581020XAB, Mar 2010.
[7] 石丽梅,赵红蕊,李明海,付罡,李聪.车载移动测图系统外方位元素标定方法[J].测绘学报,2015(1):52-58.
Varying Arm Compensation in MMS Based on Gyro-Stabilized Platform
ZHOU Dong-ling, LIN Han, HU Guang-feng, QU Xue-yun
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)
Gyro-stabilized platform together with Position and Orientation System (POS) are the stabilized controlling component of the Mobile Mapping System (MMS),and its high navigation precision has a direct effect on imaging.A varying arm compensation algorithm based on gyro-stabilized platform is proposed.The varying arm between GPS antenna and POS during mapping is computed using attitude of gyro-stabilized platform.Compensating the varying arm in position and velocity computation of POS,we can get much more precise position and orientation.The experiment results show that this method can not only export high presion position,but also improve orientation precision a little.So it’s an effective varying arm compensation algorithm for MMS.
Gyro-stabilized platform; Varying arm; Position and Orientation System(POS); Mobile Mapping System (MMS)
10.19306/j.cnki.2095-8110.2016.03.006
2015-03-16;
2015-04-18。
国防科工局技术基础科研项目(C042012C002)
周东灵(1985-),女,硕士,工程师,主要从事组合导航、POS方面的研究。E-mail:dongling117@126.com
V19
A
2095-8110(2016)03-0032-05
猜你喜欢
导航定位学报(2022年2期)2022-04-11
学生天地(2020年3期)2020-08-25
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
汽车观察(2018年9期)2018-10-23
数学大世界(2018年1期)2018-04-12
快乐语文(2018年36期)2018-03-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
