
基于模糊微分先行PID算法的温度控制研究
2016-03-10 08:31ResearchontheTemperatureControlBasedonFuzzyDifferentialForwardPIDAlgorithm
自动化仪表 2016年2期
Research on the Temperature Control Based on Fuzzy Differential Forward PID Algorithm
邓 丽1,2 卢 根1,2 蒋 婧1,2 费敏锐1,2
(上海大学机电工程与自动化学院1,上海 200072;上海市电站自动化技术重点实验室2,上海 200072)
基于模糊微分先行PID算法的温度控制研究
Research on the Temperature Control Based on Fuzzy Differential Forward PID Algorithm
邓丽1,2卢根1,2蒋婧1,2费敏锐1,2
(上海大学机电工程与自动化学院1,上海200072;上海市电站自动化技术重点实验室2,上海200072)
摘要:在工业生产中,温度控制直接影响被控对象的生产效率和产品质量。针对目前温度控制中存在的非线性、大惯性、大滞后、难以建立精确的数学模型等特点,提出一种模糊微分先行PID控制算法,在微分先行PID控制器之前加上模糊控制器,对控制达到调节的效果,使得控制输出量的变化在受到干扰时较单纯的微分先行PID控制作用大。试验结果表明,该方法有效缩减了自整定时间,表现出更好的抗干扰能力和控制效果,具有广泛的实际应用价值。
关键词:温度控制PID控制算法模糊控制自整定干扰系统振荡优化智能算法热电偶继电器
Abstract:In industrial productions,the production efficiency and product quality of controlled objects are directly affected by temperature control.Because of the features that currently exist in temperature control,such as nonlinearity,large inertia and time delay,accurate mathematical model is difficult to be established,thus the fuzzy differential forward PID control algorithm is proposed.With this algorithm,the fuzzy controller is added prior to the differential forward PID controller for adjusting the control effect; the control action may be stronger than of the simple differential forward PID controller when the process is disturbed.The test results show that the proposed method effectively reduces the self-tuning period,and improves the anti-interference capability and control effect,it offers a wide range of practical application value.
Keywords:Temperature controlAlgorithm of PID controlFuzzy controlSelf-tuningInterferenceSystem oscillationOptimizationIntelligent algorithmsThermocoupleRelay
0引言
温度控制仪器仪表被广泛地应用在工业生产中。面对一些像电阻炉、加热器等温控系统,常规PID控制和一些改进的PID控制,都难以取得良好的控制效果,会出现系统稳定性差、超调量大、抗干扰能力不足等问题[1-2]。针对普通PID控制中存在的问题,相继出现了很多的改进方法[3-4]。杨晓生等[5]提出将微分先行PID算法用于铸锭炉温控中,对传统的PID控制进行改进,引入微分先行环节,提前对输出量测值进行微分运算,对温度设定值不做微分,使系统克服超调的作用变强,避免设定值的升降引起系统的振荡,取得了良好的应用效果。但简单微分先行环节的引入,也会使得被控量的变化较缓和,同时系统抗干扰的能力也有待进一步的提高。
随着智能控制算法的不断发展,将智能算法应用于PID控制中得到了广泛的研究[6-8]。Wati等[9]利用遗传算法优化PID控制参数,从而控制空气加热器温度,表现出良好的控制性能,但是智能算法的随机搜索性对PID的控制稳定性有一定的影响。Yang等[10]在PID控制中引入模糊控制思想,将其应用于加热系统中,能很好地进行温度控制,但是控制性能仍有待改善。模糊控制是一种新型控制方法,对非线性或不确定对象有良好的控制效果,能够解决常规PID控制难以解决的实际工程问题。本文提出一种模糊微分先行PID控制算法,对于传统的PID引入微分先行策略进行调节控制,在微分先行PID控制器之前加上模糊控制器进行改进研究,并应用于温度控制中具有很重要的研究价值。
1系统构成
本文对一个完整的温度控制系统进行研究和分析,整个温度控制系统由温度控制仪、继电器、被控对象和数据采集仪及计算机构成,如图1所示。
由图1所示,整个温度控制系统包括控制环节、执行环节、反馈环节以及实时显示环节。箭头①为控制环节。温度控制仪表根据当前测量值与设定值的差值及其他参数计算出控制输出量,从而达到控制继电器开通与关断的目的。箭头②为执行环节。继电器为被控对象与电源之间的电子开关,通过控制环节控制继电器开通时间,进一步控制被控对象加热时间。箭头③为反馈环节。在被控对象中安装了两根K型热电偶,其中一根连接到温度控制仪表,使其能够测量出当前温度值,进行反馈控制。箭头④为实时显示环节。另一根K型热电偶用于与数据采集仪相连接,采集来的信号通过数据采集仪分析和传输给计算机,并显示出来。
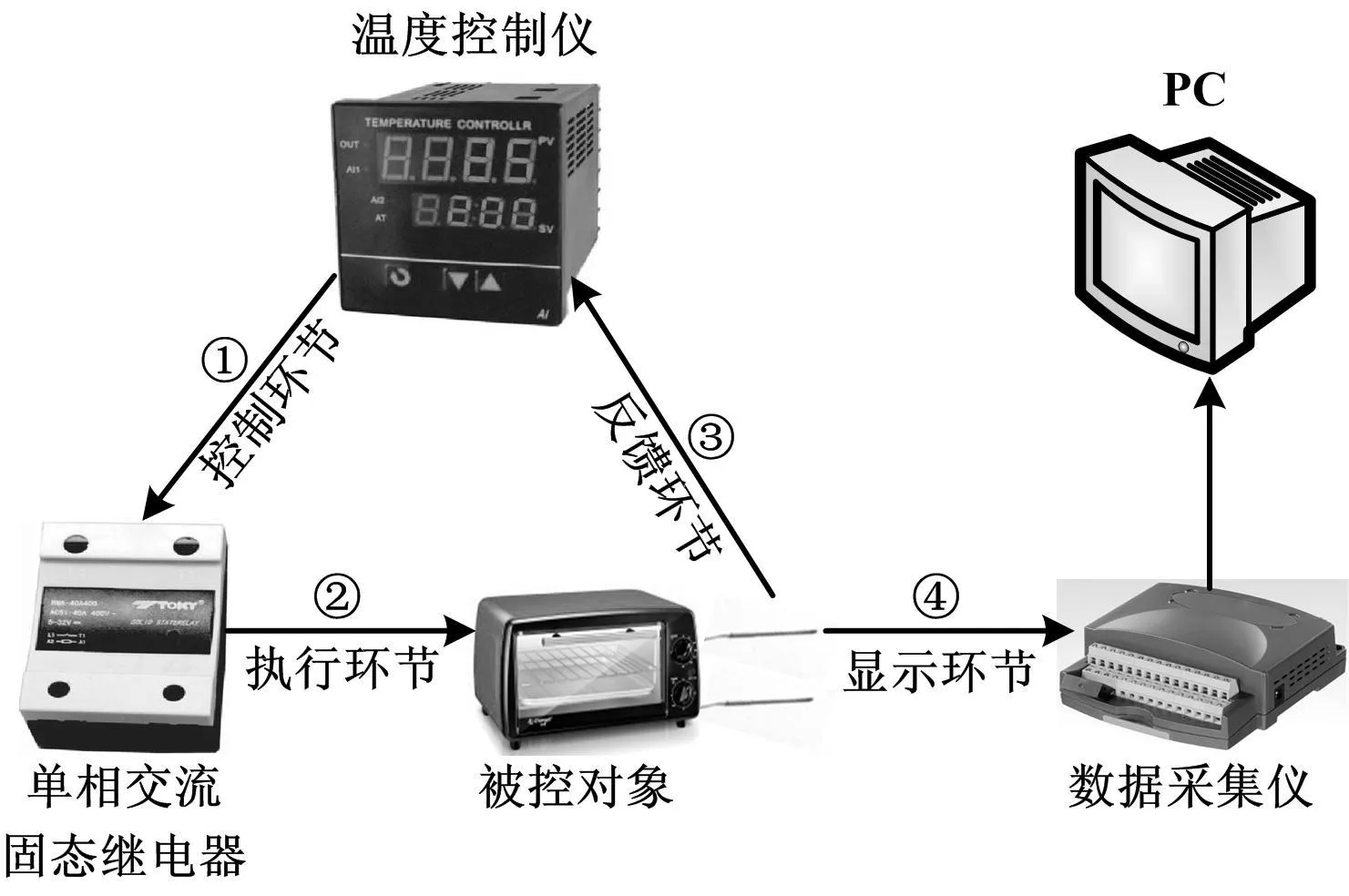
图1 系统结构图
2系统控制算法
2.1微分先行PID控制算法
在工业过程控制中,因为PID 控制具有简单、鲁棒性强等优点被广泛应用在各个领域。但传统PID控制器的结构还不完美,普遍存在积分饱和现象,导致系统失控,超调量过大。针对此种问题,采用微分先行算法来设计温度控制器,解决被控对象因惯性大而造成的调节品质差的问题[5-6]。相对于普通 PID 控制算法来说,微分先行PID算法的实质是提前对输出量进行微分运算,算法框图如图2所示。

图2 微分先行PID控制结构框图

(1)
(2)
转换为差分形式:
(3)
代入式(2)中整理可得:

(4)
而传统的PID控制器的微分环节的输出为:
(5)

2.2模糊微分先行PID控制算法
模糊控制(fuzzy control)是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术,其在提出后得到了广泛的应用[11-13]。模糊控制的过程主要为输入量模糊化,经过模糊推理,再通过去模糊化处理输出结果,最后由执行机构实现对被控对象的模糊控制。模糊控制不需要被控对象的数学模型,非常适用于非线性、数学模型不确定的控制对象,对被控对象的时滞、时变性和非线性具有一定的自适应能力,并且具有较好的鲁棒性。鉴于模糊控制的性能特点,本文以微分先行PID控制算法为基础,引入模糊控制,对PID控制进行改进调节,用于工业生产中温度控制的研究。
微分先行PID控制算法只对输出测量值h(t)进行微分,对温度设定值r(t)不做微分,避免设定值的升降引起系统的振荡,但也会使得被控量的变化较缓和。为了使得被控量在受到除了设定值以外的其他干扰引起的温度变化之后,能够更为快速地恢复,本文在微分先行PID控制器之前加上模糊控制器。在受到干扰时,PID参数能够相应做出变化,使得控制输出量能够比单纯的微分先行PID控制作用下的变化大。模糊微分先行PID控制算法原理如图3所示。

图3 模糊微分先行PID控制算法原理


温度系统在受到干扰时能够及时反应,需要加大输出控制量。在恢复到接近设定值时,需要尽量减小输出的控制量,使系统能够平稳地达到设定值而又不出现冲温的现象。以此为目标,设计了如表1所示的模糊控制规则表。
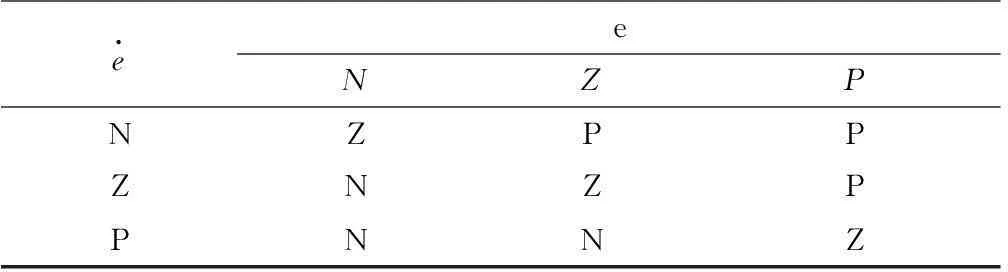
表1 模糊控制规则表
模糊控制规则的设计,可以有效地控制系统温度平稳的变化,提高抗干扰的能力。模糊微分先行PID 控制算法的应用,使得控制输出量能够比单纯的微分先行PID控制作用增大。当温度偏差较大时,采用模糊控制,响应速度快,动态性能好;当温度偏差较小时,采用微分先行PID控制,静态性能好,满足系统控制精度,从而获得更好的控制效果。
3实验结果及分析
本文以某企业项目为应用背景,验证算法的有效性能。首先在图1所示温度控制系统中,利用微分先行PID控制算法和模糊微分先行PID控制算法分别做了两组实验,实验环境为初始设定值同为200 ℃,从室温开始。上电之后均立即开始自整定,自整定结束之后会自动切换到相应的控制过程中,然后加上多种干扰,观察最终稳定效果。
3.1设定值变化
这一工况是模拟被控对象为了满足不同需求,在不断电的情况下改变设定值的过程。图4所示为设定值从200 ℃改为250 ℃时两种控制方法下的曲线变化过程,而图5所示为设定值由250 ℃改为150 ℃的过程。

图4 设定值由200 ℃改为250 ℃时曲线变化过程

图5 设定值由250 ℃改为150 ℃时曲线变化过程
由图4可以看出,利用模糊微分先行PID控制算法的响应曲线明显比单纯的微分先行PID控制算法的上升速度快,而且平稳。图4(a)的上升时间为10 min,而图4(b)的上升时间约为5 min,有效缩减了响应稳定时间。
由图5(a)可以看出,上升时间超过12 min,而图5(b)中的上升时间大约为11.5 min,仍比单纯的微分先行PID控制算法的上升速度快,稳定时间短。
3.2外部干扰
图6所示的实验图是模拟电烤炉的炉门突然被打开又合上的工况。图6(a)所示为温度下降10 K之后合上炉门,使用微分先行PID控制算法的曲线变化过程,图6(b)所示为温度下降20 K之后再合上炉门,使用模糊微分先行PID控制算法的曲线变化过程。

图6 在200 ℃处受到干扰时曲线变化过程
可以看出,在图6(a)所示的上升过程中,有加热不足而产生振荡的现象,导致升温过程较长;而图6(b)所示的上升过程比较迅速并且没有冲温,曲线平滑,上升稳定时间明显缩短。
3.3上升过程
该组实验为完成自整定并稳定一段时间后,断电并使被控对象温度降为室温再重新上电的过程。由于仪表具有记忆功能,在不重新设定的情况下,再次上电使用的是上次记录的PID参数进行控制。
图7设定值为200 ℃,图8设定值为250 ℃。由图7可以看到这一过程中的两组曲线都是平滑快速上升,无超调。
图7 升温到200 ℃时曲线变化过程示意图
实验通过自整定得到PID控制参数,在控制过程中加入不同的干扰,以验证算法的应用性能。通过分析比较可知,当设定值发生变化或者存在外部干扰等工况时,模糊微分先行PID控制算法具有更好的应用效果,能够快速、稳定、无超调地控制温度变化,有效地缩短了稳定时间,得到了快速恢复、抗干扰性强的控制效果,并在实际应用中表现出良好的性能,具有很重要的研究意义和应用价值。
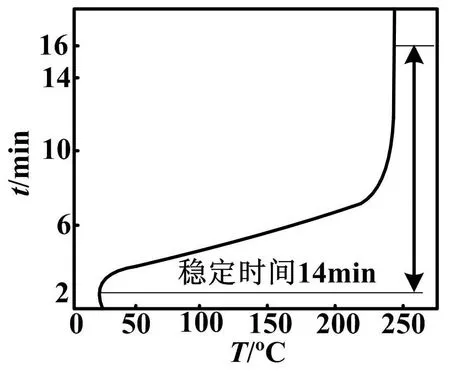
图8 升温到250 ℃时曲线变化过程示意图
4结束语
传统的PID控制算法结构简单、易于实现,但要实现精确快速无超调的控制,还需要对其进行改进。本文在微分先行PID控制算法的基础上,加入了模糊控制,提出一种混合型的模糊微分先行PID控制算法,不仅解决了系统振荡的问题,而且当存在外界干扰、设定值频繁变化时,能对温度系统实现更好的控制效果,抗干扰性强,并且不会产生冲温现象,表现出良好的应用性能。
目前,温度控制仪器仪表的应用极其广泛,对控制效果的要求也越来越高,针对传统控制方法所存在的局限性,引入更多不同的智能控制算法结合应用是一个很好的研究方向。
参考文献
[1] Kiam H A,Chong G,Yun L.PID control system analysis,design and technology[J].IEEE Transactions on Control Systems Technology,2005,13(4): 559-576.
[2] 王蕾,宋文忠.PID控制[J].自动化仪表,2004,25(4): 1-5.
[3] 王安,杨青青,闫文宇.模糊自整定PID控制器的设计与仿真[J].计算机仿真,2012,29(12): 224-228.
[4] Mahmud K.Neural network based PID control analysis[C] // 2013 IEEE Global High Tech Congress on Electronics,2013: 141-145.
[5] 杨晓生,彭志坚,肖益波,等.基于微分先行PID算法的铸锭炉温控系统[J].电子工业专用设备,2009(174): 42-45.
[6] 王威,杨平.智能PID控制方法的研究现状及应用展望[J].自动化仪表,2008,29(10):1-3.
[7] Shao M K Y,Li F,Jiang B Y,et al.The application of improved genetic algorithm in nonlinear PID control[C] // Proceedings of the World Congress on Intelligent Control and Automation,2011: 794-798.
[8] 杨智,陈志堂,范正平,等.基于改进粒子群优化算法的PID控制器整定[J].控制理论与应用,2010,27(10): 1345-1352.
[9] Wati D A R,Hidayat R.Genetic algorithm-based PID parameters optimization for air heater temperature control[C] // IEEE International Conference on Robotics,Biomimetics and Intelligent Computational Systems,2013: 30-34.
[10]Yang Q J,Li G H,Kang X S.Application of fuzzy PID control in the heating system[C] // Chinese Control and Decision Conference,2008: 2686-2690.
[11]蔡志端,毛建华,王培良.基于模糊免疫自适应PID的工业电炉多点温度协调控制[J].制造业自动化,2013,35(1): 40-43.
[12]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1): 166-172.
[13]王海青,姬长英,刘同召,等.模糊自整定PID 温度控制系统的建模与仿真[J].计算机工程,2012,38(7): 233-235.
中图分类号:TH81;TP273
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201602018
上海市科委专项课题基金资助项目(编号:14DZ1206302)。
修改稿收到日期: 2015-04-05。
第一作者邓丽(1978-),女,2008年毕业于东南大学控制理论与控制工程专业,获博士学位,副教授;主要研究方向为先进控制理论及应用、智能优化算法以及计算机视觉等。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
湖北农机化(2021年7期)2021-12-07
环球时报(2020-08-11)2020-08-11
制造技术与机床(2017年3期)2017-06-23
电子制作(2016年21期)2016-05-17
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17
质量技术监督研究(2015年1期)2015-04-09
自动化与仪表(2014年10期)2014-02-26
