
基于视频解析的高速公路车辆测速研究
2016-03-04 09:30:54强添纲吴占红欧阳冬冬
森林工程 2016年1期
强添纲,林 雨,吴占红,邵 平,欧阳冬冬
(1.东北林业大学 交通学院,哈尔滨 150040;2.富裕县友谊民族学校,黑龙江 富裕 161200)
基于视频解析的高速公路车辆测速研究
强添纲1,林雨1,吴占红2,邵平1,欧阳冬冬1
(1.东北林业大学 交通学院,哈尔滨 150040;2.富裕县友谊民族学校,黑龙江 富裕 161200)
摘要:为了精确地测量高速公路车辆的速度,降低高速公路车辆测速成本,文章提出了运动目标检测算法,并自主验证并开发出了一种基于视频解析的高速公路多车辆的测速软件。在该方法中,首先利用改进的背景差分法有效地提取前景目标;然后,利用“伪目标”消除方法,保留有效的运动目标;再次,通过卡尔曼跟踪算法获取有效目标的运动轨迹;最后,通过摄像机标定获取运动目标单位时间内行驶的实际距离。经过验证算法有效的提高了车辆检测的精度,有着较好的参考价值。软件实现了高速公路车辆超速预警及事故责任认定的智能化,使事故认定更加科学准确。软件为高速公路工作人员处理交通事故提供了辅助决策软件,提高了硬件设备的利用率并减少了人力,具有良好的经济效益和社会效益。
关键词:智能交通;视频解析;测速;高速公路
引文格式:强添纲,林雨,吴占红,等.基于视频解析的高速公路车辆测速研究[J].森林工程,2016,32(1):68-71.
0引言
高速公路是交通运输和国家现代化的重要标志。据统计,高速公路发生的交通事故中,有超过70%的都是由于超速引起的[1-3]。大量的超速行为,给高速公路的行车安全造成了极大隐患。智能交通系统(ITS)的任务之一是监督高速公路车辆速度等运行状况,为车辆运行管理提供信息和依据,达到限制车辆超速的目的[4-8]。因此,精确地测量高速公路车辆速度,可以有效减少交通事故和保障行车安全。
目前,基于视频解析的车速测量技术成了国内外学者研究的热点[9-14]。利用摄像机获取数据不但安装简便、设置灵活,而且视频检测具有容易模块化、集成化的优点,但视频检测也存在局限性,例如在大雾、阴雨天等条件下,视频速度检测是不适用的。基于视频解析的实时测速方法是虚拟线圈测速法,在所拍摄的视频图像中的车道上,相距30~50 m处画出两个虚拟线圈,它利用车辆通过两个虚拟线圈的时间得出其车辆运行速度。该方法简单易行,不破坏路面,不更换线圈;但测速误差大,并且一次仅能对一辆车进行测速[15-17]。
1算法原理
与传统的测试方法相比,本文的主要特色是能实现多个运动目标的实时测速。本文的主要创新点如下。
1.1提出一个新的背景差分法—基于高斯滤波的双阈值背景差分法
与传统的背景差分法相比,这里提出的改进方法能有效地减少“空洞”和抑制噪声。视频测速会受到天气、视频的清晰度、拍摄角度等因素的影响,因此在运动目标检测方面本文提出了一种新的背景差分法,提高了运动目标的检测精度。改进算法的具体实施步骤如下。
(1)根据公式(1)获取t时刻当前帧与背景差分后的图像F(x,y,t)。
其中,I(x,y,t)为t时刻的图像,Ib(x,y,t)是利用∑-Δ方法更新后的背景图像;G(x,y)是均值为μ、方差为σ的二维高斯函数用于抑制图像中的噪声。
(2)根据公式(2)获取基于高阈值的二值化图像和低阈值的二值化图像。

(2)
(3)根据公式(3)获取基于低阈值的二值化图像。

(3)
(4)为了实现程序的全自动化运行,定义Th和Tl表达式如公式(4)所示。
(4)
其中,μ1和σ1分别是F(x,y,t)中所有像素点的灰度值的均值和方差。
(5)联合Fl(x,y)和Fh(x,y)获取最终前景目标图像f(x,y),通过图1的(a)和(b)可以看出本算法的有效性。
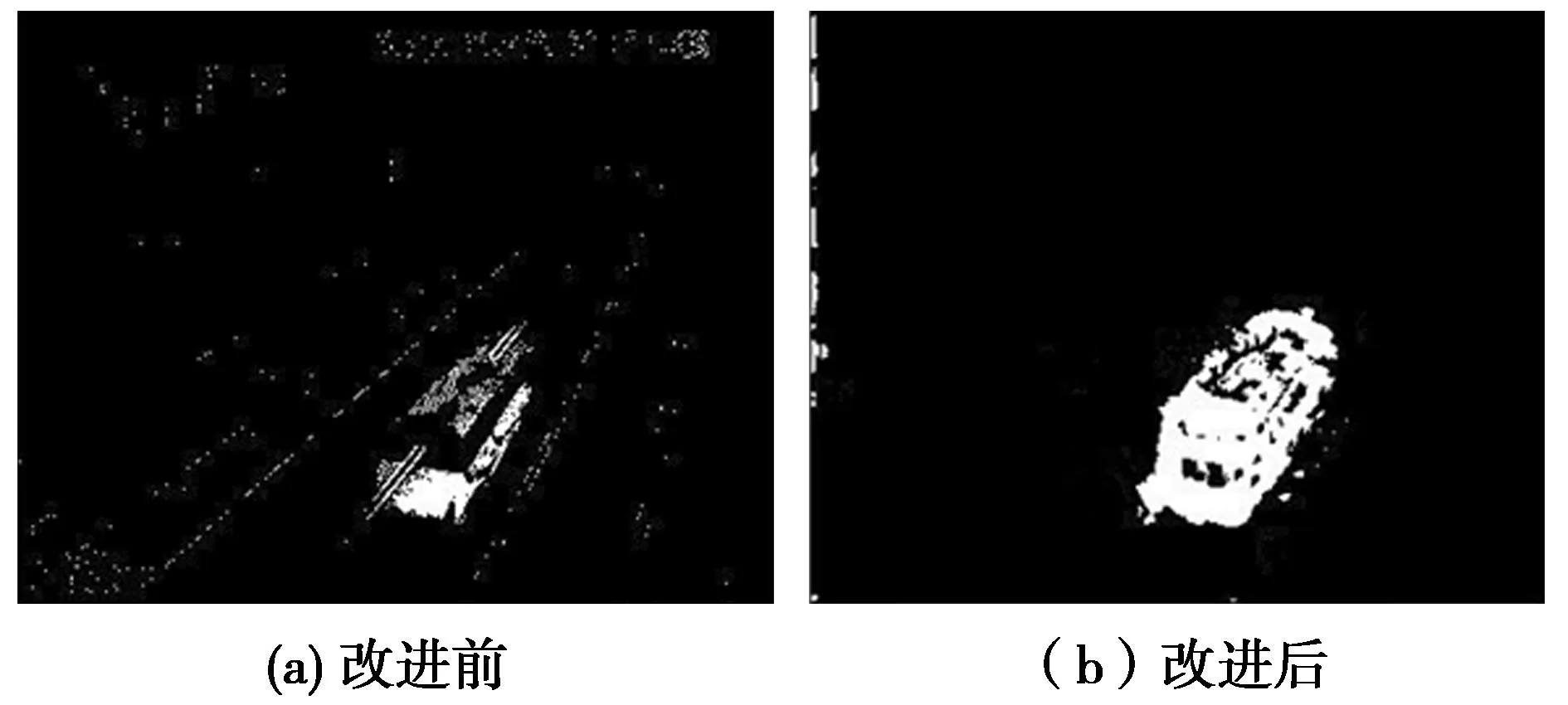
图1 对比图Fig.1 Comparison charts
1.2提出一种“伪目标”消除算法
运动目标提取后,下一步则需要进行卡尔曼滤波。由于光照条件、噪声等因素的影响,一个运动目标二值化后有可能断裂为两个面积不同的目标。该现象的出现会降低跟踪精度,从而导致测速的不准确。针对该问题,本系统首先提出了一种基于面积选择的“伪目标”消除算法。
本算法的核心思想是根据运动目标的面积确定该运动目标是否保留。因此本算法的关键问题是阈值的选择,临界值过大会屏蔽掉一些小型车辆,过小则失去了意义。假设ROI区域(检测区域)面积,根据边缘检测获得区域的面积为s。本项目在实现的过程中,S和s的值分别等于ROI中像素点的个数和边缘检测获得区域面积内像素点的个数。它们的计算表达式如公式(5)所示。
(5)
其中,M和N分别是ROI区域中像素的行数和列数,m和n分别是利用边缘检测获取的区域内像素点的行数和列数。根据经验,当s和S的比值小于0.16时,该运动目标应被忽略,否则,可以保留。通过图2中(a)和(b)的对比,可以看出该算法的有效性。

图2 对比图Fig.2 Comparison charts
2软件设计原理
在算法的基础上,本文从实际出发,通过高速公路视频验证并开发应用软件。本软件主要包括3个功能模块:视频载入模块、视频解析模块和车速计算模块。软件不但能实现高速公路上车辆的实时测速和预警,也能在交通事故分析中精确地获取事故车辆的速度。软件是在VC平台上,借助OpenCV计算机视觉类库通过C语言编程实现的,具体流程如图3所示。
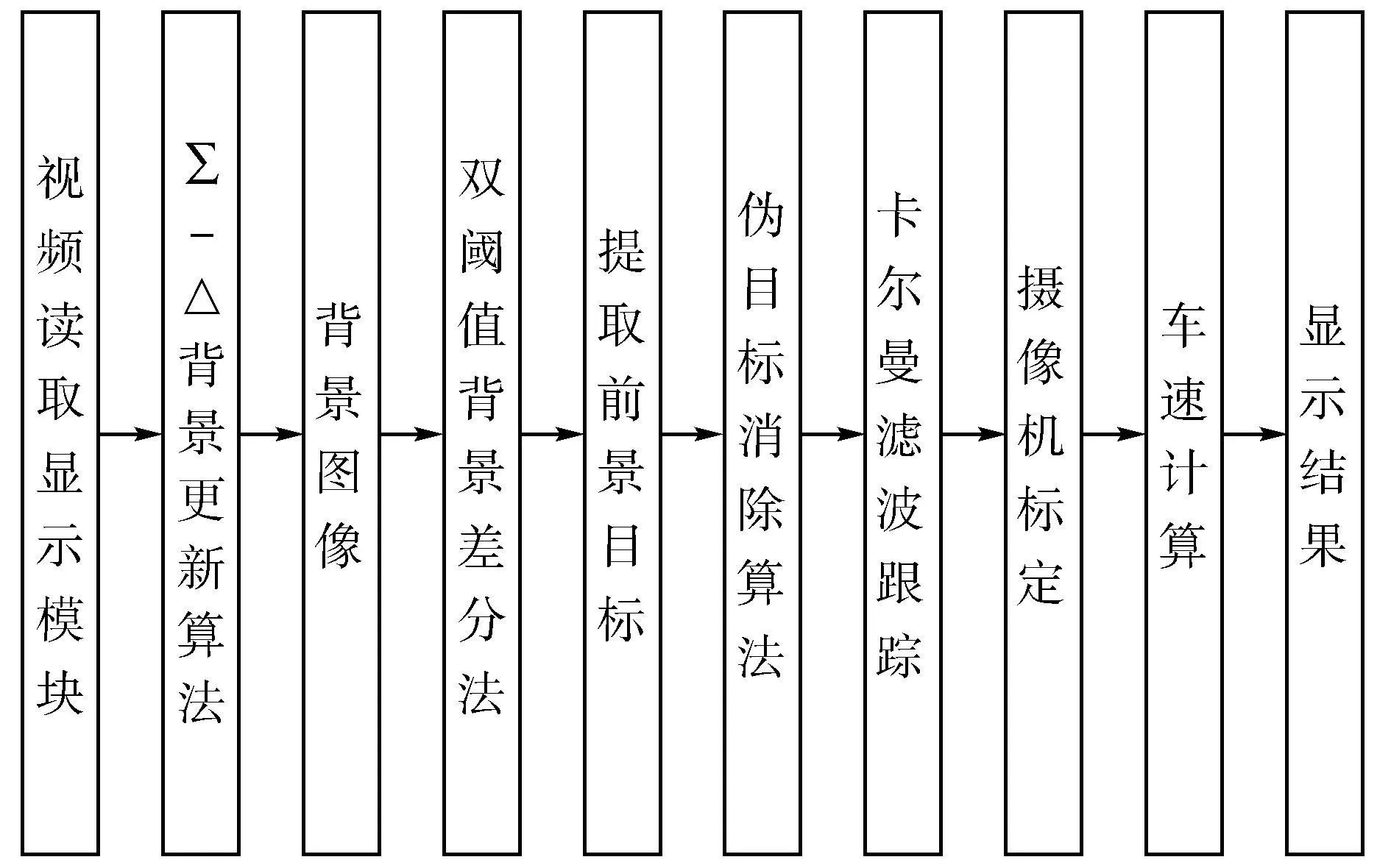
图3 设计流程图Fig.3 Flow chart of the design
2.1视频载入模块
功能:实现视频的实时获取、加载、显示和存储。
方法:主要是将OpenCV中的函数进行了集成,实现了视频的实时获取、加载、显示和存储。OpenCV类库中集成了大量的计算机视觉函数及接口,在视频载入时可调用OpenCV计算机视觉类库cvCaptureFromAVI函数实现视频的载入,由OpenCV函数库中的cvShowImage函数进行逐帧图像的显示,形成视频的播放。同样在进行视频的存储时也是集成了OpenCV函数库中的函数。
2.2视频解析模块
功能:①获取读入视频的前景目标,②实现背景的实时更新,③视频每帧图像的二值化。视频解析模块界面如图4所示。
原理:在视频中运动的目标称之为前景,其他的目标称之为背景。视频中的每一帧图像与背景相减,剩余的就是前景目标。由于光照的影响,背景是不断变化的。因此,为了实时有效地获取前景目标,背景则需要实时更新。另外,为了提高后续处理工作的效率,获取前景目标后需对其进行二值化。

图4 视频解析模块界面截图Fig.4 Video parsing module interface
方法:利用基于高斯滤波的双阈值差分法获取前景目标(详细的内容在第三部分介绍)。利用∑-△方法实现背景的更新,算法如公式(6):
Mt(x)=Mt-1(x)+sgn(It(x)-Mt-1(x))
(6)
其中,x为每帧图像中的像素值;Mt(x)为t时刻更新后的背景图像;Mt-1(x)为t-1时刻的图像;It(x)当前帧图像。通过图5中(a)和(b)的比较可以看出∑-△方法的有效性。
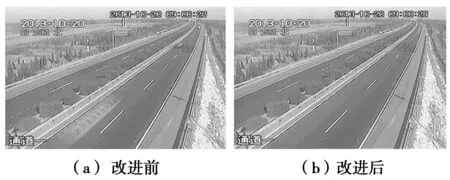
图5 对比图Fig.5 Comparison chart
2.3车速计算模块
功能:①实现运动目标的跟踪,②车速的检测和显示。车速计算模块界面如图6所示。
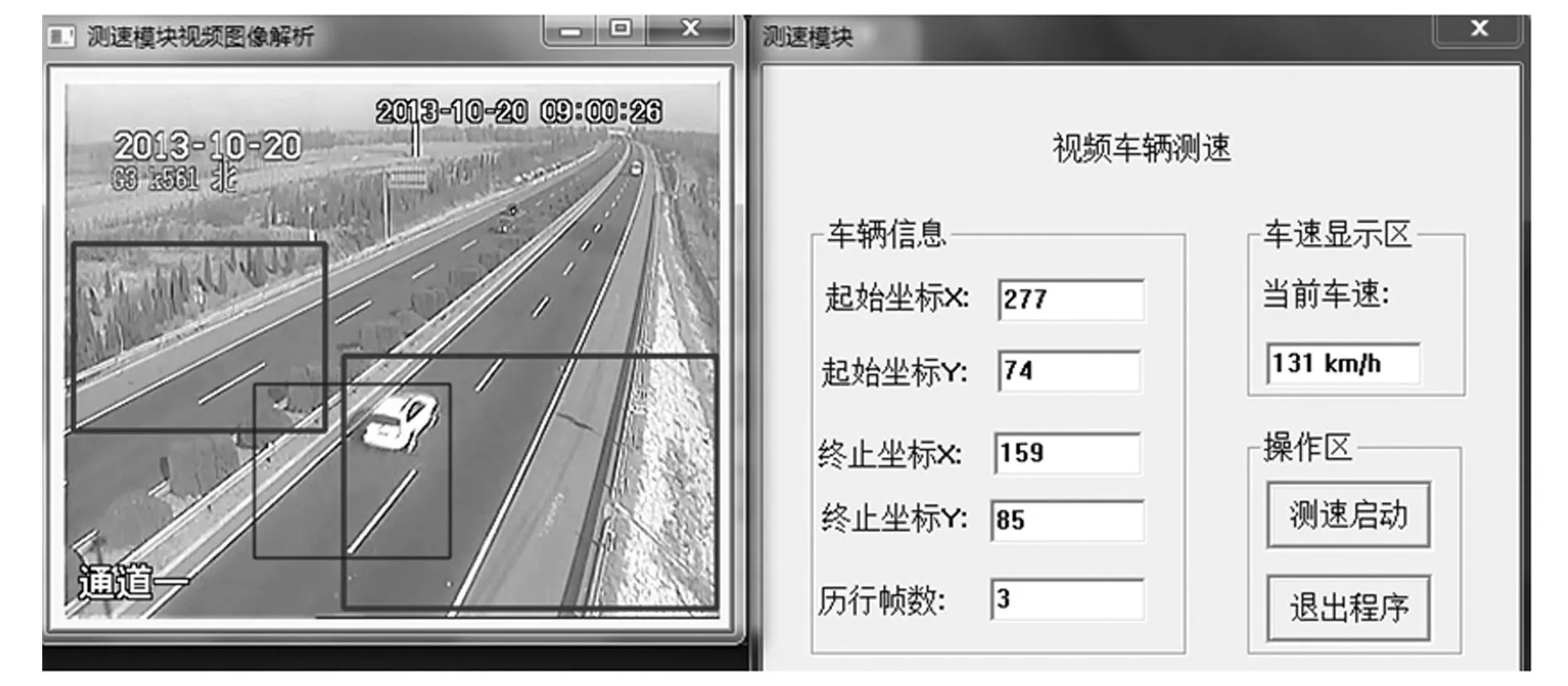
图6 车速计算模块界面截图Fig.6 The interface of speed calculation module
原理:在获取前景目标(车辆)的基础上,利用卡尔曼滤波实现目标的跟踪和获取单位时间内目标(车辆)的运动距离,从而实现车速的检测。
方法:利用卡尔曼滤波是实现目标的跟踪;利用摄像机标定的方法,实现由图像距离到物理距离的映射。卡尔曼滤波是用于时变线性系统的递归滤波器,因为两帧图像相差时间很短(1 s视频由25帧图像组成),因此可将运动目标看做匀速直线运动。在卡尔曼滤波跟踪中,选取运动目标的质心坐标作为输入量,通过递归方程实现运动目标的跟踪。文章需要利用摄像机标定的方法,实现由图像距离到物理距离的映射,具体步骤如下:
(1)利用卡尔曼滤波跟踪计算出像素位移。卡尔曼滤波很好的实现了运动目标的跟踪,从而确定了前后两帧图像中同一运动目标的坐标位置,通过坐标很容易获得两个运动目标的像素距离。
(2)借助某一目标的像素位移和实际位移标定出摄像机参数。在摄像机标定中,运动目标的像素位移、实际位移和摄像机参数有着特定的转换方程。通过上一步得知运动目标的像素位移,在选取某一物体的实际坐标位置后代入方程可得到摄像机参数。
(3)由摄像机参数与实际位移对应关系实现测速。通过以上两步得到了摄像机的参数,在利用摄像机参数与实际位移的对应关系得到运动目标的实际位移,从而获得了单位时间内运动目标的速度。因此可知对于摄像参数的标定是至关重要的,其关系到位移测量的精确程度,进而影响最后的速度检测。
3结束语
目前,高速公路中因车辆超速引起的事故频发生,随之产生的二次事故、事故责任认定问题尤为突出。对此,文章提出新的检测算法,在实际视频为基础上以VC为开发平台,借助OpenCV计算机视觉类库开发此软件。研究可在归纳为3个方面:
(1)将本软件应用到高速公路,与现有的设施相结合,可实现高速公路的车辆的实时测速并发布超速预警信息。
(2)在发生事故后,利用本软件分析视频,准确计算出车辆在事故前后的速度并分析行为变化,实现事故责任的认定。
(3)随着后期的研究,将实现流量统计、排队长度检测和交通事件检测等功能的应用。
本文在提出运动目标检测算法的前提下,对算法进行了实例验证,并借助于计算机进行了软件开发。研究可得,软件实现了高速公路车辆超速预警及事故责任认定的智能化,使事故认定更加科学准确。软件为高速公路工作人员处理交通事故提供了辅助决策软件,提高了硬件设备的利用率并减少了人力,具有良好的经济效益和社会效益。
【参考文献】
[1]段建民,刘冠宇,郑榜贵.基于视觉及多特征的前方车辆检测算法[J].北京工业大学学报,2015,41(9):1326-1333.
[2]陈征,王飞,项煜.智能视频分析技术在高速公路建设和管理中运用分析[J].中国科技信息,2015(1):72-74.
[3]支晨蛟.基于视频的高速公路车速检测和车辆跟踪系统[D].杭州:浙江大学,2013.
[4]姚明明.高速公路隧道停车检测中的车辆跟踪及状态识别方法研究[D].重庆:重庆大学,2014.
[5]张晓松,张波,金涛.高速公路ETC交易耗时估计与车道分区设计[J].公路工程,2014,39(4):78-81+85.
[6]邱凌赟,韩军,顾明.车道模型的高速公路车辆异常行为检测方法[J],计算机应用,2014,34(5):1378-1382.
[7]林立原,陈林.基于高斯混合模型和卡尔曼滤波的车辆检测与跟踪方法[J].武汉科技大学学报,2015,38(3):226-230.
[8]王迎,周燕.基于广义线性模型的高速公路交通事故预测[J].公路工程,2015,40(5):115-119.
[9]邓其,潘晓东,方青.基于可拓理论的高速公路事故动态预警方法[J].公路工程,2013,38(4):115-119.
[10]孙宁,张重德.一种提高视频车速检测精度的算法分析和实现[J].合肥工业大学学报,2014,37(12):1462-1468.
[11]江东,曾亚光.机动车视频测速系统及主要问题分析[J].中国测试技术,2007,33(5):41-43.
[12]童剑军.说说视频测速[J].中国交通信息产业,2006(9):36-38.
[13]王海燕.视频违章超速监测系统技术分析[J].32H中国交通信息产业,2006(8):110-112.
[14]王大鹏.区间测速系统的框架结构与功能设计[D].广州:中山大学,2008.
[15]王健.视频测速系统中的测距和摄像机标定研究[D].南昌:南昌大学,2008.
[16]鲜海滢,李晓峰,李在铭.基于摄像机的车辆测速仪[J].电子测量与仪器学报,2008,22(3):94-99.
[17]秦武,基于机器视觉的高速公路车辆测速研究[D].宜昌:三峡大学,2011.
Research on the Measurement of Vehicle Speedon Highways Based on Video Analysis
Qiang Tiangang1,Lin Yu1,Wu Zhanhong2,Shao Ping1,Ouyang Dongdong1
(1.Traffic College,Northeast Forestry University,Harbin 150040;
2.Fuyu Friendship National School,Fuyu 161200,Heilongjiang Province)
Abstract:In order to measure the speed of vehicles in expressways accurately and reduce highway speed vehicle costs,a testing algorithm for moving objects was put forward and the corresponding software for measuring the vehicle speed in highways was designed based on video analysis.Firstly,the detection method of background subtraction was used to effectively extract the prospect goal;then,the method of “phony” elimination was adopted to keep effective kinetic target.Next,the target trajectory was acquired effectively through Kalman tracking algorithm;finally,the camera was used to calibrate the actual distance per unit time for the moving target.After verification,the accuracy of vehicle detection by the algorithm was effectively improved and the algorithm has a good reference value.The software can realize the intelligence of highway speeding warning and accident responsibility confirmation and the identification of accidents will be more scientific and accurate.For staff,the software has provided decision support to deal with traffic accidents and improve the utilization of hardware and decrease the use of manpower,which has good economic and social benefits.
Keywords:intelligent transportation;video parsing techniques;speed measurement;highway
作者简介:第一强添纲,博士,教授。研究方向:寒地交通系统管理与控制技术。E-mail: qiangtg123@163.com
基金项目:黑龙江省博士后特别经费项目(LBH-TZ0501);国家自然科学基金项目(51405075)
收稿日期:2015-10-09
中图分类号:S 714.8
文献标识码:A
文章编号:1001-005X(2016)01-0068-04
猜你喜欢
建材发展导向(2021年20期)2021-11-20 05:43:18
小学阅读指南·低年级版(2017年11期)2017-12-06 15:14:59
科技创新与应用(2016年34期)2016-12-23 15:54:44
电子技术与软件工程(2016年20期)2016-12-21 09:28:29
电子技术与软件工程(2016年19期)2016-12-19 18:42:01
电子技术与软件工程(2016年19期)2016-12-19 17:08:08
数字技术与应用(2016年9期)2016-11-09 23:02:51
科学与财富(2016年28期)2016-10-14 04:43:28
中国交通信息化(2016年9期)2016-06-06 07:42:10
小说月刊(2014年4期)2014-04-23 08:52:20
